城市环境中无人机搜索航路规划算法*
2023-10-20 08:41王靖宇周子涵
火力与指挥控制 2023年7期
王靖宇,周子涵,彭 鹏
(1.空军工程大学防空反导学院,西安 710051;2.空军指挥学院,北京 100097)
0 引言
在城市作战环境中,战场目标侦察是获取敌方目标信息的重要手段,能够为后续侦察监视和火力打击等一系列任务提供信息支撑[1-2]。对于环境情况未知的城市环境,相对于传统抵近侦察的方式,采用无人机执行战场侦察任务具有更高的安全系数[3-4]。由于大量建筑物的遮挡,城市环境下的搜索任务面临更多的挑战[5]。
无人机战场侦察任务旨在以较小路径成本,在短时间内展开大范围搜索,实现环境信息获取[6]。经典的战场侦察规划方法通过平行线扫视的方式实现区域的全覆盖搜索,对于环境信息未知且存在大量障碍物的区域并不适用[7-9]。动态的战场侦察路径规划方法根据搜索任务进程、环境变化情况实时规划搜索路径,具有更强的环境适应性[10-12]。现有动态航迹规划方法重点针对目标概率分布已知、障碍物信息固定且已知等情况展开研究,难以适用于城市环境条件下未知环境的搜索。
本文针对未知城市环境的目标搜索问题展开研究,建立了无人机搜索模型和环境地图模型,进而提出基于模型预测控制(model predictive control,MPC)的搜索航路规划方法,通过预测未来无人机飞行轨迹,计算预期收益来优化飞行路径,引导无人机展开搜索。仿真验证了所提出航路规划方法的有效性。
1 城市环境下搜索任务模型
与一般环境下的搜索相比,城市环境中存在的楼宇障碍物是影响搜索效率的关键因素。本章对城市环境下的搜索问题进行分析,并建立环境地图模型及其更新机制,解决未知环境下局部障碍物感知、目标探测和全局地图表征问题,为后续搜索航路规划奠定基础。
1.1 问题分析
本文所考虑的无人机搭载有两类传感器,分别是感知传感器和探测传感器。诸如激光雷达的感知传感器主要功能是感知周围障碍物情况,探索环境的“轮廓”;诸如光电吊舱等探测传感器的主要功能是发现并识别目标。记感知传感器和探测传感器的作用半径分别为Rp和Rd,且Rp>Rd。假设待搜索区域为矩形区域,在搜索前,无人机对区域的障碍物分布完全未知,区域内存在一个静止的待搜索目标,目标位置未知,如图1 所示。
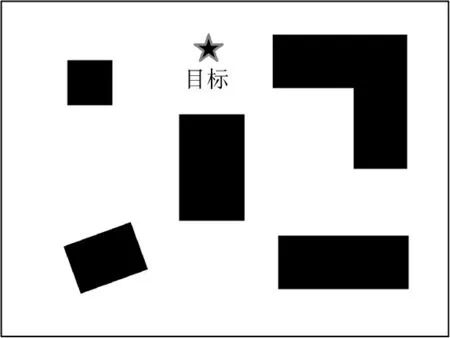
图1 城市环境中障碍和目标分布示意图(全局视角)Fig.1 Schematic diagram of obstacle and target distribution in urban environments(global perspective)
无人机搜索过程是一个边感知边探测的过程。感知是指无人机依靠本机搭载的主动式感知传感器感知周围环境;探测是指无人机依靠本机搭载的主动式探测传感器探测目标。无人机搜索就是不断建立局部地图,并依赖局部地图进行目标探测的过程。搜索过程中,无人机视角的局部地图如图2所示。
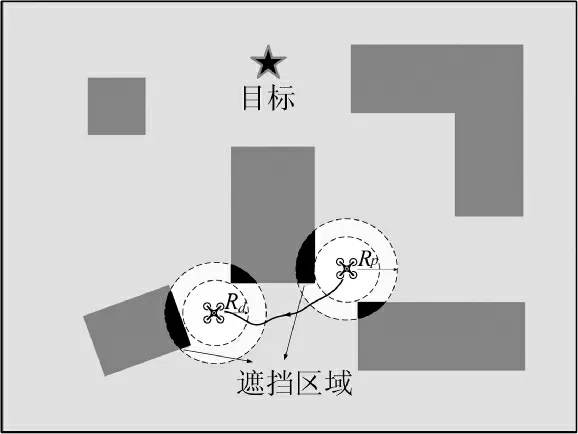
图2 城市环境中无人机搜索示意图(局部视角)Fig.2 Schematicdiagram of UAV search in urban environments(local perspective)
无人机能够获取到位于感知传感器范围内的障碍物的边缘信息。图2 中黑色区域表示已探明的障碍物禁飞区域,灰色区域表示尚未探明的区域,白色区域表示已探明的无障碍区域。由于障碍物的存在,位于感知传感器范围内的区域存在一定的遮挡。当目标位于探测传感器范围内时,则认为无人机能够发现目标。
1.2 环境地图模型
环境地图是环境的抽象表达,采用约简高效的方式对其进行数学表示,对提高搜索任务,计算实时性和精确性十分重要。借鉴文献[12],本节采用栅格化方式对环境地图进行建模,以矩阵形式存储环境地图。设待搜索区域为Dx×Dy的矩形区域,按照栅格粒度δ 对任务区域进行栅格化,生成M×N个栅格,如图3 所示。

图3 环境地图栅格化表征示意图Fig.3 Schematic diagram of grid representation of environment map
1.3 环境地图更新方法
2 基于MPC 的搜索航路规划方法
如何利用环境地图设计合理的方式,引导无人机在区域中开展搜索行动,是提高搜索效率的重要手段。本章提出基于MPC 的搜索航路规划方法,通过预测环境地图的变化情况,优化无人机的搜索奖励,引导无人机的搜索飞行。
2.1 航路预测模型
航路预测模型是指通过给定无人机未来一段时间内的飞行控制量,预测未来无人机的飞行轨迹。在未知环境搜索任务中,航路预测模型能够预测无人机向不同方向飞行获得的搜索收益,进而优化无人机的搜索方向。
为降低优化问题求解空间,假设无人机飞行速度为定值,控制量仅是航向角改变量,其中,k表示离散的时间步。参考文献[12]中的无人机运动
2.2 搜索奖励函数
本节设计合理的搜索奖励函数,有效引导无人机感知未知环境/障碍物,探索未知区域,在尽可能短的时间内探测到目标。将奖励函数设计为两个方面,分别是奖励项和惩罚项。
2.2.1 探测奖励
H 步预测累计探测奖励是多步奖励的加和,但考虑到未来奖励具有滞后性,参考强化学习理论中的折扣率γ,计算总的探测奖励为:
2.2.2 感知奖励

2.2.3 障碍惩罚

无人机的搜索奖励函数为以上奖励/惩罚项的加权:
式中,α1,α2和α3为权重系数。
2.3 优化求解方法

为减少计算量,根据无人机飞行性能,将每个时间步内无人机可选动作离散化为2m+1 个动作,即航向角改变量的可选值为
从宏观来看,每个时间步无人机有3 种可选动作:直飞、左转和右转。左转和右转时可选的角度有m 个。经过H个时间步之后,无人机的扩展路径数量为(2m+1)H,如图4 所示。

图4 无人机搜索扩展航路示意图Fig.4 Schematic diagram of UAV search with expanded flight path
基于当前环境地图和预测路径,可以预测未来H 个时间步之后的环境地图,称为预测地图。基于上文提出的搜索奖励函数计算方法,通过预测地图和当前环境地图,可以计算出每条路径的搜索奖励函数值。搜索奖励函数值最大的扩展路径,即为无人机的最优路径。在执行过程中,无人机预测H 个时间步,执行一步,并重复预测过程,确保整个搜索过程的滚动优化。
3 仿真分析
利用MATLAB 对所提出的无人机搜索航路规划算法进行仿真验证。通过构建模拟城市环境的地图信息,派出无人机在没有先验信息的条件下对任务区域进行边感知边探测,直至找到目标。
3.1 仿真条件
仿真中构建了模拟城市环境的地图,如图5 所示。任务区域大小为400 m×300 m,其中包含不同类型的楼宇,还有3 条城市树木绿化带和一个矩形围墙,无人机从围墙入口(200 m,15 m)处进入区域并展开搜索任务。将目标位置设置在U 型楼宇的中间,坐标位置为(290 m,210 m)。

图5 仿真中构建的模拟城市环境地图Fig.5 Simulated city environment map built by simulation
选择旋翼无人机为仿真对象,以速度3 m/s匀速飞行,单位时间内最大航向角改变量为60°,航向角分割系数为m=5,预测步数为H=3。传感器设置有激光雷达和光电吊舱,激光雷达有效探测范围为Rp=15 m,可见光传感器有效搜索范围为Rd=7 m,无人机距离障碍物的最小安全距离为Rs=3 m。
3.2 仿真结果
图6 展示了搜索完成后的环境地图和无人机飞行轨迹。环境地图中白色区域为无人机已感知并探测的区域,无人机已探测该区域不存在目标;浅灰色区域为无人机已感知但未探测的区域,无人机能够在该区域内安全飞行;深灰色区域为无人机未感知或已感知为障碍物的区域。

图6 局部视角下无人机搜索过程图Fig.6 UAV search process diagram from a local perspective
由于灰色区域只能确定障碍物信息,不能确定目标信息,因此,无人机在搜索过程中会优先探测已感知的区域。从图6 中可以看出,无人机能够接近障碍物的时候避开障碍物,并尽可能保持最大化搜索覆盖率。下页图7 给出了感知区域和探测区域覆盖率随时间的变化曲线。

图7 感知和探测覆盖率随时间变化曲线Fig.7 Variation curves of perception and detection coverage with time
从图7 中可以看出,前300 s 无人机的感知覆盖率能保持最大斜率增长,此时无人机几乎没有重复搜索;300 s 之后,由于无人机感知范围与已搜索区域存在一定重叠,导致感知覆盖率的斜率有所下降。相比之下,由于搜索奖励函数中探测奖励的权值最大,无人机的探测覆盖率始终能够保持稳定的增长。为验证无人机在搜索过程中规避障碍物的有效性,图8 给出全局视角下的搜索过程图。
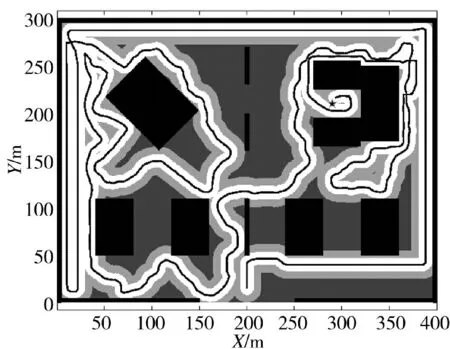
图8 全局视角下无人机搜索过程图Fig.8 UAV search process from a global perspective
如图8 所示,无人机的飞行轨迹与模拟楼宇之间的距离始终大于安全距离,能够确保自身的飞行安全。此外,无人机能够在围墙内稳定飞行,不会出现飞出围墙的情况。
4 结论
本文对城市环境下无人机搜索问题进行建模,建立了环境地图模型,描述了环境地图的更新方法。基于MPC 搜索航路规划方法,设计了无人机的搜索奖励函数,通过贪婪搜索优化得到搜索奖励最大的飞行控制量,引导无人机进行搜索。通过模拟城市环境进行仿真,验证了无人机搜索航路规划算法的可行性。本文工作为城市作战中无人机运用提供了理论支撑,具有一定的参考价值。受限于计算资源,算法中的预测步长取值较小,可能导致无人机陷入局部的情况,后续将针对此问题展开进一步研究。
猜你喜欢
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
领导决策信息(2018年50期)2018-02-22
商周刊(2017年5期)2017-08-22
中国卫生(2016年2期)2016-11-12
哈尔滨商业大学学报(自然科学版)(2016年4期)2016-09-02
中国工程咨询(2016年4期)2016-02-14
海军航空大学学报(2015年3期)2015-11-11
中学历史教学(2015年11期)2015-11-11
中国民航大学学报(2015年3期)2015-03-01