
柔性多状态开关参数辨识无差拍控制
2023-10-19 00:31张国荣王泰文侯立凯汤彬徐晨林
电测与仪表 2023年10期
张国荣,王泰文,侯立凯,汤彬,徐晨林
(合肥工业大学 电气与自动化工程学院,合肥 230009)
0 引 言
近些年来,随着电力电子技术的突飞猛进,接入配电网的分布式可再生能源(DG)不断增加,给配电网带来了DG消纳、潮流控制日益复杂化等一系列挑战[1]。与传统联络开关相比,柔性多状态开关(SOP)不仅没有传统机械式开关动作次数的限制,而且具有控制方式灵活多样的特点[2],能够有效解决上述配电网中所存在的问题。
国内外学者针对SOP进行了大量的研究。文献[3]对SOP的控制原理进行了阐述。文献[4]对含有DG和SOP的配电网的优化运行问题进行了研究。文献[5]从SOP的损耗角度出发研究了配电网中SOP的配置问题。文献[6]研究了接入SOP的新型配电网下的灵活性量化评估和优化调度问题。文献[7]对基于SOP与储能系统联合的有源配电网时序运行优化问题进行了分析。这些研究主要是从配电网的角度出发,偏向于SOP的优化运行。除此之外,还有针对SOP控制策略的研究。文献[8]采用PI双环控制策略,但是当SOP的端口数量增加时,PI控制器的数量也会增加,存在控制电路设计复杂,鲁棒性较差等缺点。文献[9]采用反馈线性化控制和滑模控制相结合的复合控制取代电流内环,减少了PI参数,同时保证了系统的鲁棒性,但是引入了滑模控制参数,需要对这些参数进行选取。
考虑到无差拍控制的控制参数可由系统参数直接计算得到,为确定的数值,并且控制也比较简单,采用无差拍控制替换PI双环的电流内环。无差拍控制在三相并网逆变器[10]、模块化多电平换流器[11]等方面均有应用。但是也正因为无差拍控制的这一特点,导致其对系统参数很敏感,当系统参数摄动时,会使无差拍控制性能变差。为了保证系统有较好的鲁棒性,可以在无差拍控制中加入参数辨识环节,对系统的参数进行在线估算。这样既可减少PI控制参数又能保证系统的鲁棒性。参数辨识方法在STATCOM的功率控制[12]、变压器短路阻抗参数的在线辨识[13]等方面均有应用。
以三端口SOP为研究对象,建立了SOP在αβ坐标系下的离散数学模型,在此基础上对无差拍控制的原理和参数辨识的实现过程进行了推导。然后就基于参数辨识的无差拍控制对各端口的UdcQ模式、PQ模式以及Uacf模式进行了具体的算法实现。最后通过在Matlab/Simulink中针对不同的工况进行仿真实验,对所提控制算法的效果进行验证。
1 三端SOP的拓扑和数学模型
1.1 三端SOP的拓扑结构
SOP由全控型功率器件组成,一般连接在馈线的末端,可以实现不同馈线之间的柔性互联,使配电网同时具备开环运行与闭环运行的优势[14]。图1为一种三端SOP的配电网接入拓扑。

图1 三端SOP拓扑结构
1.2 三端SOP的数学模型
三端SOP的三个端口结构对称,每个端口都由三相电压型变流器(VSC)组成,图2为其中任一端口的主电路拓扑。其中,L为交流侧滤波电感,R为电感内阻,C为直流侧滤波电容。

图2 SOP一端拓扑
假设系统电压为三相平衡的纯正弦波,采用L滤波时,根据图2可得SOP的数学模型[15]:
(1)
式中k为a,b,c三相;ek为交流系统侧电压;ik为电感电流;uk为变流器输出电压;Udc为直流母线电压;sk为第k相的开关函数。
对式(1)进行αβ坐标变换后可得:
(2)
式中iα和iβ分别为电感电流在α轴和β轴上的分量;eα和eβ分别为交流统侧电压在α轴和β轴上的分量;uα和uβ分别为变流器输出电压在α轴和β轴上的分量。
由于三端SOP共直流母线,所以直流侧满足:
(3)
式中ijx为第j个端口的第x相电感电流;sjx为第j个端口的第x相开关函数。
忽略三端SOP的损耗以及线路损耗,在三端SOP稳定运行时直流母线电压恒定,根据功率守恒可得:
(4)
式中k为1,2,3三个端口;Pk为第k个端口输出的有功功率;idck为第k个端口流入直流侧的电流。
2 无差拍控制
对式(2)进行整理可得:
(5)

对式(5)进行离散化处理可得:
x(k+1)=Hx(k)+Gu(k)
(6)

(7)
为了达到无差拍的控制效果,通常有:
(8)

在实际进行无差拍控制时,由于存在控制上的延迟,会造成电感电流的预测存在误差,从而使电流畸变[17]。为了提高无差拍电流控制的性能,通常是将式(7)向后推算一步,预测k+2时刻的采样电流:
(9)
对式(9)进行整理可得:
(10)
(11)
(12)
采用线性预测法估计式(10)中第k+1时刻的交流系统侧电压:
(13)
将上述的式(7)、式(11)~式13)代入式(10)即可得到无差拍电流控制的表达式。
3 参数辨识方法
从无差拍电流控制的表达式中可以看出,无差拍控制的控制精度依赖于系统参数。在实际运行中,若系统参数发生变动,将会严重影响到无差拍电流控制,使控制效果变差,甚至无法正常工作。因此要加入参数辨识环节,对系统的参数进行实时的准确估算。
为了实现对系统参数的在线估算,这里采用遗忘因子递推最小二乘法,其参数估计的公式为[19]:
(14)
式中θ(k)为系统待辨识的参数;K(k)和P(k)均为递推矩阵;Φ(k)为观测矩阵;y(k)为系统输出;λ为遗忘因子,取值为: 0.95≤λ<1。
以α轴的电流控制为例,对式(7)进行整理可得:
iα(k)=x1iα(k-1)+x2(eα(k-1)-uα(k-1))
(15)

由式(15)可得最小二乘格式的数学模型为:
(16)
具体的实施过程为:
(1)设置初值:θ(0)=0;P(0)=aI。其中a为一个充分大的数,可取为106,I为单位矩阵;遗忘因子λ在指定范围内取值,可根据辨识结果进行适当调整;
(2)采样当前时刻的y(k)与Φ(k);
(3)根据式(14),计算K(k)、θ(k)和P(k);
(4)k→k+1,返回第二步,继续循环。
通过以上的参数辨识便可得到θ,进而计算出相应的系统参数。
4 基于参数辨识的无差拍控制算法实现
三端SOP的每个端口通常采用PI双闭环控制结构[20],根据每个端口的具体工况,外环通常为功率控制或者电压控制,内环为电流控制。由于PI参数的整定较为复杂,为了减少PI控制环节,内环采用基于参数辨识的无差拍控制。因为无差拍控制的参数可以由系统参数直接计算得到,所以可以简化内环的设计。
根据配电网运行场景的不同,SOP通常有三种控制模式:UdcQ控制、PQ控制和Uacf控制。其中,三端SOP正常运行时,其中一个端口要在UdcQ模式下运行,另外两个端口一般在PQ模式下运行,特殊情况下可能会根据需要转换为Uacf模式。在上面的理论基础上,下面将对这三种控制进行具体实现。
4.1 定直流电压和无功功率控制
工作于UdcQ模式的端口的目的是:保持直流母线电压恒定,控制该端口的无功功率,同时维持整个系统的功率平衡。
根据瞬时无功功率理论,可定义各端口的有功与无功功率:
(17)
式中P和Q为端口输出的有功功率和无功功率;ed、eq为eα和eβ通过αβ/dq变换得到的分量;id、iq为iα和iβ通过αβ/dq变换得到的分量。
由于系统电压三相平衡,令d轴与系统电压矢量同方向,则eq=0,代入式(17)有:
(18)
忽略SOP自身损耗,其有功功率的平衡将直接影响直流侧电压的稳定,而且根据式(18),有功功率正比于有功电流。因此,可直接将直流电压误差通过PI控制器得到有功电流的指令值[21]:
(19)
式中kp、ki为PI控制器的控制参数;Udcref为直流侧电压参考值。
根据式(18)可得无功电流的指令值为:
(20)
式中Qref为无功功率参考值。
图3为UdcQ控制模式的控制框图。

图3 UdcQ模式控制框图
4.2 定有功功率和无功功率控制
工作于PQ模式的端口的目的是:独立调节该端口的有功功率与无功功率。为了加快调节速度,利用稳态逆模型与PI调节器相结合的方式得到有功电流与无功电流的指令值[22]:
(21)
式中Pref为有功功率参考值;k1p、k1i为有功电流控制PI控制器的控制参数;k2p、k2i为无功电流控制PI控制器的控制参数。
图4为PQ控制模式的控制框图。

图4 PQ模式控制框图
4.3 定交流电压控制
当三端SOP的某一端口发生馈线故障时,为了支撑失电区域的电压与频率,保证重要负荷的不间断供电,该端口需要工作于Uacf模式[23]。由于在这种情况下,端口是给负载供电,没有与电网相连,所以要对无差拍控制的式(10)做出一定的修改:
(22)
式中uαl(k+1)和uβl(k+1)为负载电压第k+1个采样时刻在α和β轴上的分量。
同样,将最小二乘格式的数学模型式(16)修改为:
(23)
为了加快调节速度,这里同样利用稳态逆模型与PI调节器相结合的方式得到有功电流与无功电流的指令值:
(24)
式中udlref和uqlref为负载电压在d轴和q轴上的参考值;P和Q为负载的有功和无功功率;k3p、k3i为有功电流控制PI控制器的控制参数;k4p、k4i为无功电流控制PI控制器的控制参数。
图5为Uacf控制模式的控制框图。
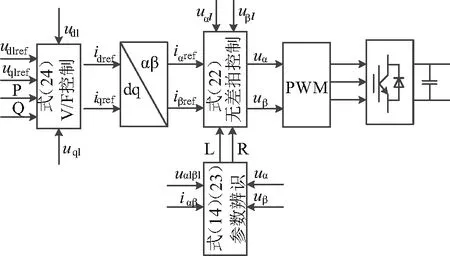
图5 Udcf模式控制框图
5 仿真算例分析
为了验证上述控制算法的可行性,在MATLAB/Simulink中搭建了相应的仿真模型。设定三端SOP正常运行时,端口1在UdcQ模式下运行,端口2和端口3在PQ模式下运行。仿真参数如表1所示。

表1 仿真参数
5.1 鲁棒性分析
直流母线电压的控制关系到整个控制系统能否正常运行,从上文的分析中可以看出无差拍控制对滤波电感参数很敏感。假设在t=0.6 s时端口1的滤波电感由6 mH变为12 mH,图6为PI双环控制的直流母线电压波形,图7为没有在无差拍控制中加入参数辨识环节的直流母线电压波形,图8为加入参数辨识后的直流母线电压波形,电感参数的辨识结果如图9所示。
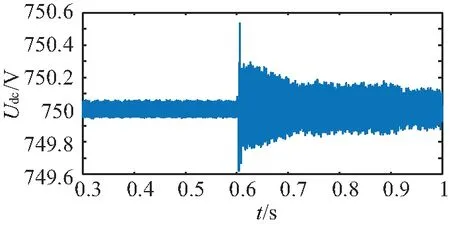
图6 PI双环控制
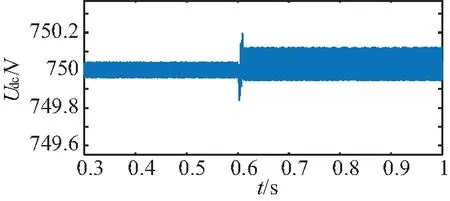
图7 无差拍控制
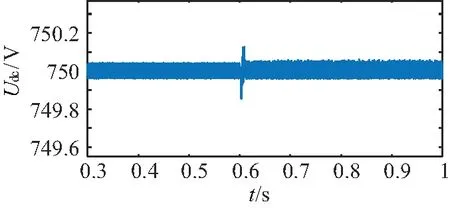
图8 加入参数辨识的无差拍控制
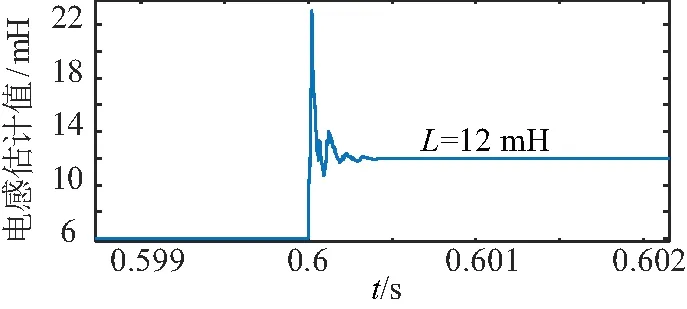
图9 电感参数辨识结果
可以看出,采用无差拍控制能够减小直流母线的电压波动,加入参数辨识环节后,能够进一步减小直流母线的电压波动。说明当系统参数发生变化时,采用基于参数辨识的无差拍控制可以使系统具有较好的鲁棒性。
由于遗忘因子递推最小二乘法是一种在线的参数辨识方法,所以其在实际应用中会因不同工况的需求对辨识速度的快慢有着不同的要求。因此为了使该方法在实际使用时能够满足一定的速度要求,需要能够根据需求调节辨识速度。改变遗忘因子λ,图10为λ=0.98时电感参数的辨识结果,图11为λ=0.97时电感参数的辨识结果。可以看出,通过适当调节λ的值,可以加快辨识速度,以满足实际应用中的速度要求。

图10 λ=0.98电感辨识结果

图11 λ=0.97电感辨识结果
5.2 稳态运行分析
设定端口1的无功功率参考值为0.3(标幺值,以下的功率参考值均为标幺值);端口2有功功率的参考值为0.5,无功功率参考值为0;端口3的有功功率参考值为0.1,无功功率参考值为0.2。假设在0.4 s时端口2的有功功率的参考值变为0.7,在0.5 s时端口2的无功功率的参考值变为-0.1。三个端口的有功功率与无功功率波形分别如图12和图13所示。可以看出,三个端口的有功功率满足功率守恒,无功功率均能稳定在设定的参考值上,说明上述的控制算法能够使三端SOP实现稳定运行。
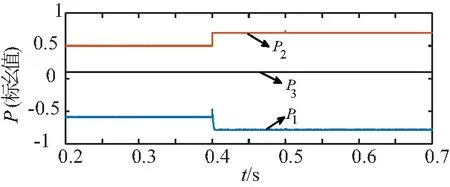
图12 三个端口的有功功率波形

图13 三个端口的无功功率波形
5.3 交流系统侧电压扰动
假设端口2的交流系统侧电压在0.3 s时出现一个扰动,幅值变为0.6(p.u.),持续0.1 s。图14为端口2输出的电压与电流波形,图15为端口2的有功功率与无功功率波形,可以看出电压和电流响应较快,功率波形在经过较小的波动后能快速稳定。图16为端口3输出的电压与电流波形,可以看出端口2的扰动没有对端口3的正常运行造成影响。说明当出现扰动时,系统具有良好的抗扰性能。

图14 端口2电压与电流波形

图15 端口2有功与无功功率波形

图16 端口3电压与电流波形
5.4 故障供电
故障供电即为Uacf控制模式,当SOP所连馈线发生故障时,为了保证重要负荷的不间断供电,需要提供电压和频率支撑。假设端口2出现故障,且末端所连负荷为电阻负荷,为了保证所提控制算法的可行性,应该要求负荷阻值在各种可能的取值的情况下,装置均能稳定运行。而从控制方程中可以看出电阻的阻值对装置的稳定运行没有影响,所以这里为了使所得的波形更加便于观察,经过仿真调试后取R=50 Ω;仿真中设定交流侧额定电压为380 V,因此选择相电压的峰值311 V作为电压基准值。图17为端口2输出的电压与电流波形,可以看出电压波形保持稳定,即实现了故障供电功能。且从图18和图19可以看出,另外两个端口的电压与电流波形均保持稳定,说明端口2没有对端口1和端口3的正常运行造成影响,验证了所提控制算法的可行性,为故障区域的不间断供电提供了新的解决方案。

图17 端口2电压与电流波形

图18 端口1电压与电流波形
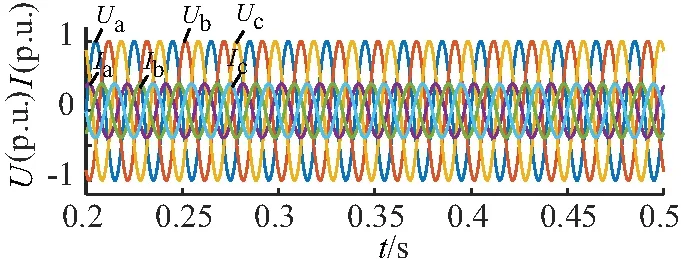
图19 端口3电压与电流波形
5.5 不同工作模式动态切换分析
根据三端SOP的协同控制方案,当某一端口所连馈线故障时,该端口需要由原来的控制模式切换为Uacf控制模式,这个动态的切换过程会对系统的稳定性产生影响。这里考虑其中一种情况:发生馈线故障的端口原来工作在PQ控制模式。假设故障在0.3 s时发生于端口3,图20为端口3三相电压波形,图21为三个端口的有功功率波形,图22为三端SOP直流侧电压波形。可以看出,在工作模式切换的过程中,各变量能很好地跟踪各自的给定值,且动态响应速度较快,说明所提控制算法在不同工作模式切换的过程中仍然有较好的性能。
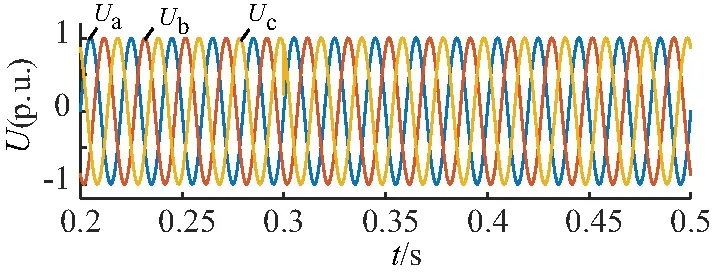
图20 端口3电压波形
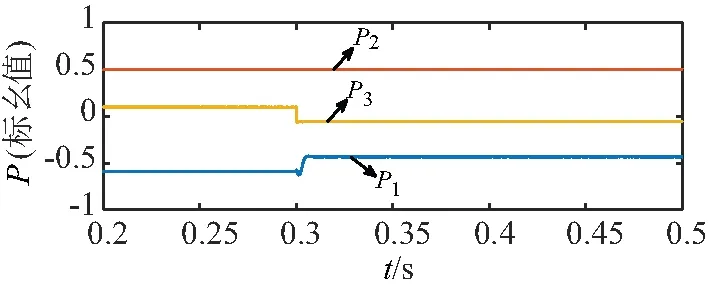
图21 三个端口的有功功率波形

图22 直流侧电压波形
6 结束语
针对SOP传统PI双环控制中PI参数较多且整定困难的问题,采用无差拍控制设计电流内环,且为了提高系统的鲁棒性,引入递推最小二乘参数辨识环节,仿真实验表明,当系统参数摄动时,该控制方案有较好的鲁棒性。最后通过静态工作模式的组合和工作模式动态切换过程的仿真,验证了所提控制算法的可行性。且由于该控制算法实现简单并且为离散域的控制方法,具有一定的工程应用价值。
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
电机与控制应用(2022年4期)2022-06-27
科学家(2021年24期)2021-04-25
通信电源技术(2018年5期)2018-08-23
网络安全和信息化(2017年6期)2017-11-23
电脑迷(2015年6期)2015-05-30
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年21期)2015-04-09
电子设计工程(2015年12期)2015-02-27
电测与仪表(2014年12期)2014-04-04
