草莓悬挂追光式立体栽培系统的设计与应用
2023-10-17 08:58:42任杰高承才杨平孙修东谢锦平
上海农业科技 2023年5期
任杰 高承才 杨平 孙修东 谢锦平*
(1 上海农林职业技术学院,上海 201699;2 上海华维可控农业科技集团股份有限公司,上海 201505)*为通信作者
立体栽培是通过栽培架或栽培管道、悬挂等形式按垂直梯度进行的分层栽培,该技术可充分利用温室的空间和太阳能,适用于低矮作物种植[1]。近年来,立体栽培作为一种新兴的栽培形式,在草莓生产中得到了广泛应用(目前,草莓立体栽培模式较多,可分为吊柱式、高低架式、A 字形或X 形架式、日光温室后墙式、悬挂式架空栽培等[2-3]),且取得了较好的栽培效果(研究表明,草莓立体栽培与常规地面栽培相比,其栽培密度可提高 25%以上,土地利用率提高3~5倍,单位面积产量提高2~3倍,且草莓立体栽培在病虫害防治、环境精准控制、田间作业便捷性、栽培效果观赏性等方面具有独特优势[4-5])。
目前,关于草莓立体栽培模式的研究已有较多报道,研究内容主要围绕立体栽培设施的设计与应用、立体栽培下的环境因子分析以及配套栽培技术总结等。例如,胡福生等[6]设计了一种移动式草莓人工光立体种植装置,进一步提升了普通双层H 形架立体栽培槽的空间利用率和光照条件;陈一飞等[7]设计了一种电动式草莓立体栽培机构和配套智能控制系统,可综合考虑采光、通风、温度、湿度等,实现了对普通三层栽培架的智能控制;王春玲等[8]将固定式A 字型栽培架在添加转动和控制部件后,使其以“追日”的方式进行运动,实现了栽培架行向与太阳光照射方向平行,最大限度地利用了直射光,有效改善了A 字形栽培架的光温环境,相比于固定式栽培架,草莓每667 m2产量提高了214.8 kg。
总结以往的研究,关于草莓立体栽培的生产应用和相关研究主要集中在固定式的栽培架或栽培槽模式,特别是A 字形和H 形栽培架,而对于悬挂式栽培的研究相对较少。相比于其他立体栽培形式,草莓悬挂式立体栽培对垂直空间的利用率更高[9],且栽培槽高度错落排布,形成了“天瀑”造型,这不仅提高了整体栽培效果,而且解放了温室下层空间,便于农事操作。在此背景下,为了进一步提高悬挂式立体栽培系统的光照利用率,改善草莓立体栽培系统的光照环境,从而提高草莓产量和品质,笔者特在可升降悬挂式栽培系统的基础上,设计了草莓悬挂追光式立体栽培系统,并进行了试点应用,最终取得了较好的应用效果。现笔者拟对草莓悬挂追光式立体栽培系统的具体构成及试点应用情况进行总结介绍,以供相关种植户参考借鉴。
1 可升降立体栽培系统
本文以布置于上海农林职业技术学院五厍基地半封闭植物工厂内的可升降立体栽培系统为例进行介绍。
五厍基地半封闭植物工厂的温室跨度为8 m,肩高为5 m,在不影响补光灯、环流风机等环控设备运行,保证升降运动安全运行的情况下,栽培槽的升降行程为3.5 m,升降速度为1.65 m/min。栽培槽系统主要由栽培槽、轴承及固定座、吊挂旋转提升电机、悬吊钢丝绳、花篮螺丝、分体式吊架、绕线器、安全配件、控制系统等组成,其中,钢丝绳通过花篮螺丝固定栽培组件,当驱动电机的输出轴进行转动时,带动钢管转动,而钢丝绳固定于钢管上,钢丝绳的缩短或延长带动栽培槽的升降运动。栽培槽的截面为梯形,底宽为150 mm、顶宽为270 mm、高度为150 mm,栽培槽的间距为80 cm。植物工厂在可见平面范围内全部栽种草莓,每667 m2定植草莓植株达8 000株以上,与传统栽培相比,单位面积种植株数增加39%,栽培密度显著提升。
2 追光模式设计
在传统的温室栽培模式下,作物光照受太阳高度角和方位角变化的影响,其自然光照的强度和均匀度是被动的,且往往接受的是室内下层光照。因此,温室内光照强度在垂直方向上存在明显的差异,且与太阳角度变化和构件遮挡等因素相关。同时,对于某一特定地点,一天内太阳方位角的变化是有一定规律的。如表1所示,在不同典型节气,太阳方位角自西向东变化明显。基于此,笔者在悬挂式立体栽培条件下,理论上可通过调整每条栽培槽在垂直方向上的位置,使整个栽培面始终“面向”太阳辐射方向,以此提高栽培区域的光照强度,从而充分利用室内光照,即“追光”模式。

表1 上海地区草莓生长周期典型节气主要采光时段太阳方位角变化
根据太阳方位角的变化规律,可将一天划分为若干时间段,在不同时间段调整不同的栽培槽高度,进而使整个“天瀑”形成不同的采光面,使采光最大化。以上海地区11 月为例,根据一天中的有效采光时段,将调控的目标时间设定为每日的8 时—16 时,每日“天瀑”形态变化6次,形成6种工况。“天瀑”具体变化形态见图1。值得注意的是,由于同一地区每日的日出日落时间及太阳方位角始终处于变化之中,故追光方案的时间段划分并不是固定不变的。由表1 可知,冬至(12 月22 日)太阳方位角的变化最小,立冬至立春太阳方位角呈现先减小后增大的变化趋势。因此,“天瀑”变化形态需随着时间的变化灵活调整。
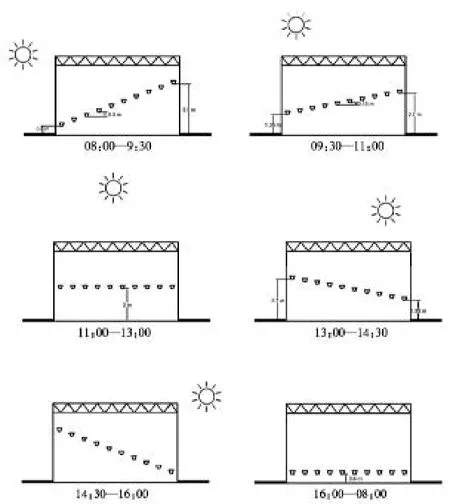
图1 追光方案下六种“天瀑”变化形态
3 追光系统控制
栽培槽的升降运动主要通过物联网智能环控系统(追光系统)进行操控。追光系统分为控制端和执行端,控制端包括手机APP、网页等云平台,执行端由智能控制模块和栽培槽、电机等升降系统组成。当执行端收到由用户通过云平台下达的具体控制指令时,首先智能控制中间件将控制指令下发至目标智能控制模块,然后由控制模块驱动目标设备做出相应动作,完成栽培槽的升降运动。在此过程中,每条栽培槽可实现单独控制、编组控制、执行方案控制以及在追光思路指导下的全自动运行。
3.1 手动控制模式和执行方案控制模式
手动控制模式即用户通过平台人为控制栽培槽的升降运动。每条栽培槽有“上升”“下降”“停止”3种状态,用户可通过点击相应选项实现栽培槽的对应动作。其中,单条控制相对灵活,适用于针对少量栽培区域的农事操作,然而若要实现较为复杂的追光控制,可通过高级控制+执行方案的形式,依次对每个栽培槽设定“开”和“停”的动作(中间间隔一定时间,且由于栽培槽升降过程属于匀速运动,可通过控制时间长短来确定其上升或下降高度,进而明确每一个栽培槽所处的位置),在制定好某个时刻多个栽培槽的控制流程后,可直接在对应时刻手动打开该流程,或设定一个执行方案,系统在每日的该时刻即可自动执行该方案,控制栽培槽升降。例如,对于图1 的6 种“天瀑”形态追光模式,可在每个阶段的开始时刻,分别制定6个执行方案,从而较为便捷地在一天之中不断变化各栽培槽的位置,实现追光运动。
3.2 全自动控制模式
为了进一步提高控制方式的针对性,简化控制流程,笔者设计了专用于追光的全自动控制模块。该模块储存了不同地区一年当中每日的日出和日落时间数据,用户在选择地理位置后,系统会自动调取该地的日出和日落时间,并按照前述的追光思路,从日出时间开始,每隔1 h 自动调整各栽培槽的位置,使由各栽培槽组成的平面始终面向太阳辐射方向,地理位置的选择也提高了系统的普适性。在开启自动追光控制后,用户无需其他操作,系统将每日自动执行追光控制。与手动控制模式等相比,全自动控制模式在符合图1的6种“天瀑”形态追光模式的基础上,进一步细化了每个时间段内部的形态变化,使“天瀑”平面与太阳方位角的对应性更强。
4 草莓悬挂追光式立体栽培系统的试点运行
4.1 测试点布置
为验证草莓悬挂追光式立体栽培系统的具体应用效果,笔者在上海农林职业技术学院五厍基地的半封闭植物工厂内进行了该系统的试点应用。笔者选择温室中部三跨进行追光试验,试验期间,利用高级控制+执行方案的形式,实现栽培槽的追光布置,并测定室内光环境特征。其中,试验组1位于整个温室自东向西第3 跨,此跨自东向西第1、3、5、7、9、10条栽培槽上各布置1个太阳辐射传感器,均位于栽培槽中部,分别编号为1-1、1-3、1-5、1-7、1-9和1-10,具体见图2;试验组2 位于整个温室自东向西第4跨,此跨10条栽培槽上各布置1个太阳辐射传感器,均位于栽培槽中部,分别编号为2-1 至2-10;对照组位于整个温室自东向西第5跨,此跨自东向西第1、5、9 条栽培槽上各布置1 个太阳辐射传感器,均位于栽培槽中部,分别编号为C-1、C-5、C-9。光照强度测定使用NTT-JYZ01 太阳总辐射传感器,其光谱范围为300~3 000 nm,信号范围为0~2 000 W/m2,灵敏度为7 ~14 μV/(W/m2),非线性≤5% ;太阳辐射传感器数据自动记录并上传至云平台,每隔5 min 采集并记录1 次数据,通过云平台可直接下载数据进行分析。

图2 太阳辐射传感器布设编号示意
4.2 结果与分析
分别取2022 年11 月8 日和11 月11 日为典型晴天和典型阴天,这两天均不执行追光方案,将所有栽培槽升至最高处(高3.3 m),取两个代表性栽培槽1-3、2-4 进行分析。由图3 可知,阴天光照强度最高不超过200 W/m2,平均值约为60 W/m2,远低于晴天光照,而晴天的光照强度平均值超过200 W/m2。说明在阴雨天气,为了尽可能提高光合效率,可对草莓进行人工补光。此外,晴天光照波动大于阴天,这是由于晴天存在大量直射光,由于阴影和遮挡的存在,使不同时刻的光照强度存在较大差异。

图3 1-3 和2-4 栽培槽在典型晴天和典型阴天的室内光照强度比较
为探究温室内光环境的垂直分布特征,选择3个日期相近的晴朗天气(2022 年10 月30 日、11 月2日和11 月8 日),比较栽培槽1-3 和2-4 在不同高度处(0.6、2.1、3.3 m)的光照强度。由图4 和图5可知,越接近于温室顶部,光照条件越好,而位置较低处的光照强度远低于上部。同时,当栽培槽位于高处时,其一天中的光照强度波动更为明显。分析其原因是,温室中上层光照的直射光比例较高,光照受构件、设备遮挡等因素的影响较大,因而光照强度会出现较大波动。
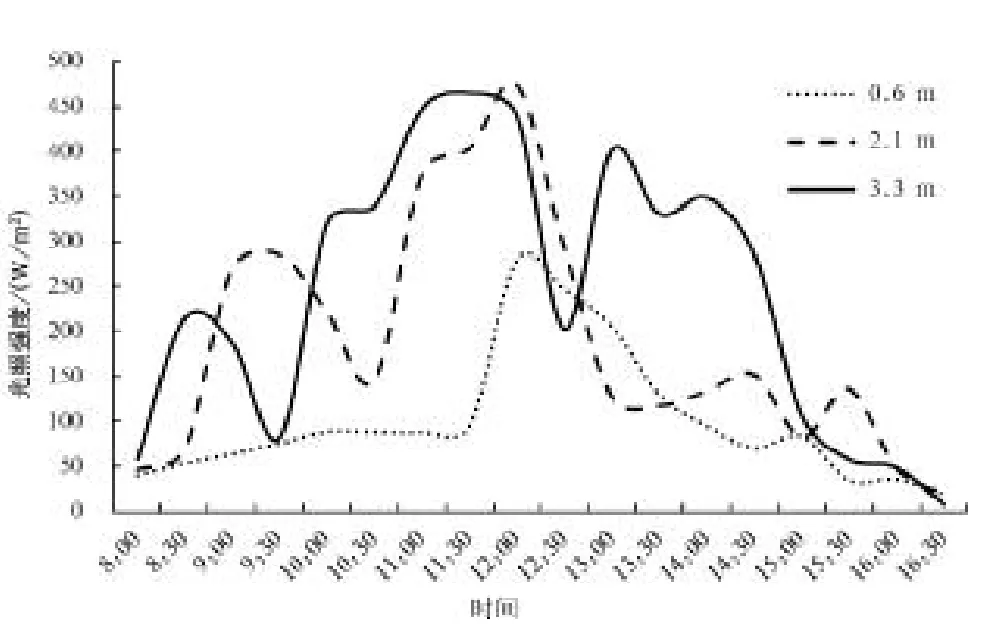
图4 1-3 栽培槽在不同高度处的光照强度比较

图5 2-4 栽培槽在不同高度处的光照强度比较
为探明草莓悬挂追光式立体栽培系统的光照强度提升情况,将两试验组各取的3条栽培槽,与对照组的C-0 进行比较。由图6 和图7 可知,在大部分时间段内,两个试验组的光照强度均高于对照,特别是在草莓光合效率较高的上午,试验组远高于对照。此外,两个试验组在执行追光方案时,由于各栽培槽的高度不同,会对彼此产生遮挡影响,例如,上午2-1 栽培槽会受到东边试验组已升起栽培槽的影响,导致2-1栽培槽的光照强度较同组其他栽培槽偏低,而在下午,由于“天瀑”形状相反,则2-1 栽培槽的光照强度又会偏高,但即便如此,2-1 栽培槽的光照强度仍高于对照,也高于草莓光饱和点。由表2 可知,试验组栽培槽的日平均光照强度要高出对照33.0%~53.0%,表明草莓悬挂追光式立体栽培系统可有效改善光环境。

图6 追光模式下试验组1 栽培槽与对照组的光照强度比较
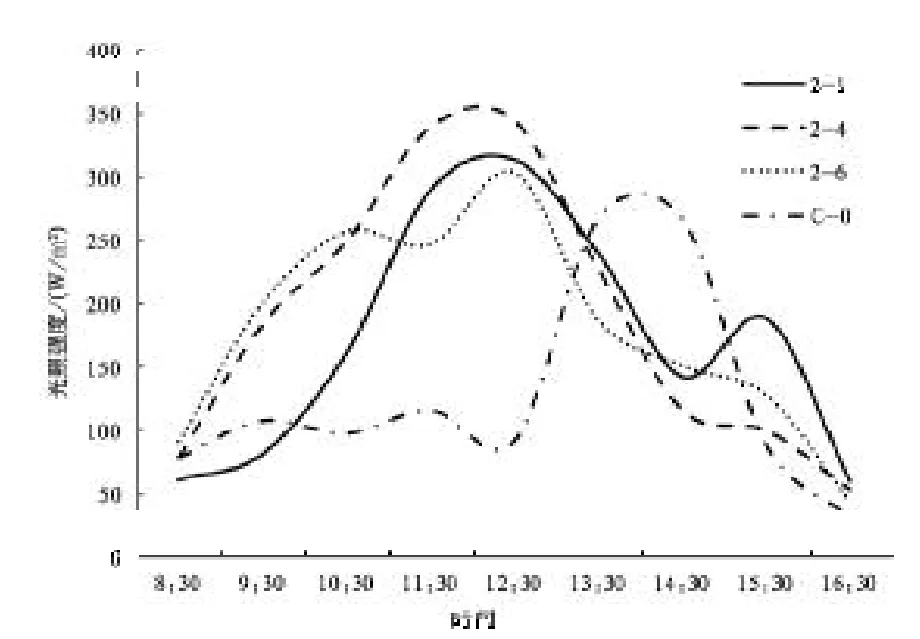
图7 追光模式下试验组2 栽培槽与对照组的光照强度比较

表2 草莓悬挂追光式立体栽培系统不同栽培槽的日平均光照强度
5 结束语
光照是影响植物生长发育、植株形态形成、光合产物积累的重要环境因子,尤其是对设施栽培草莓的叶片光合速率和果实产量与品质有着重要影响。相关研究表明,光照强度对结果期草莓的叶片光合速率具有显著影响,光合速率在光照强度为260~320 W/m2之间达到峰值,且叶片水势越高,光照强度对光合速率的影响越明显[10]。林晓等[11]对立体栽培草莓的光温效应和生长发育的研究发现,双H 架下层草莓早期产量仅为上层草莓的43%,差异达极显著水平;A字架遮阳效果不明显,但上下层草莓产量仍存在差异,表明草莓早期产量与光照强度显著相关。钟霈霖等[12]研究发现,强光可有效促进草莓果实中维生素C 和总糖的合成,中强光可促进糖分积累。以上研究均表明,高效利用自然光照是温室或半封闭植物工厂草莓栽培需要考虑的重要因素。
草莓属于喜光作物,又具有较强的耐荫性,其光补偿点通常为20~40 W/m2,光饱和点通常为90~150 W/m2,但二者并不是固定值,往往受温度、湿度、CO2浓度等外界环境因素的影响,通常上午叶片光合效率更高,中午存在“午休”现象,故从光能利用的角度考虑,应尽可能保证上午及下午的光照强度[13-14]。长三角地区进入冬季以后,日照时间逐渐变短,光照强度逐渐变弱,易出现设施内光照不足和光环境不稳定等现象,从而导致草莓花芽分化数量减少、果实品质变劣和产量下降等问题。在本研究的草莓悬挂追光式立体栽培系统的试点应用过程中,在阴天,试点温室内光照强度低于光饱和点,可通过人工补光进行补充;在晴天,试点温室内未进行追光的普通栽培区域,其全天光照值也均未达到光饱和点,说明试点温室对光照的利用并不充分,应通过追光式栽培槽布置,调节各栽培槽的高度,来形成一定规律的栽培面形状,从而使温室内绝大部分时间段(特别是上午)的光照强度处于光饱和点以上,进而延长高效光照时间,将自然光辐射的利用达到最大化。因此,从光环境的角度出发,笔者研发的草莓悬挂追光式立体栽培系统对促进草莓冬季生长发育、提高草莓产量和品质有积极作用。
值得注意的是,由于不同环境因子之间的作用是相互的,草莓的产量和品质同样受到多种因素的共同作用。因此,在应用草莓悬挂追光式立体栽培系统的前提下,探讨温度、空气湿度等环境因子的变化规律,进一步优化栽培槽布局,使之更符合草莓生长发育的实际需求,是草莓悬挂追光式立体栽培系统的进一步研究方向。
猜你喜欢
中国机械工程(2022年8期)2022-05-09 12:32:02
中国机械工程(2021年8期)2021-05-07 05:49:10
小哥白尼(趣味科学)(2020年3期)2020-07-27 01:44:42
音乐教育与创作(2019年8期)2019-05-16 04:06:34
军营文化天地(2018年2期)2018-04-20 07:08:03
阅读与作文(小学高年级版)(2017年10期)2017-10-11 07:45:17
创新作文(小学版)(2016年10期)2016-11-11 05:45:17
爆笑show(2015年4期)2015-06-24 01:57:56
小青蛙报(2014年7期)2014-03-21 21:21:14
河南科技(2014年4期)2014-02-27 14:06:59