
基于抗干扰阵列天线的北斗RTK 解算与数据分析
2023-10-15 07:36中国电子科技集团公司第五十四研究所应俊俊惠沈盈陈秀德
数字技术与应用 2023年9期
中国电子科技集团公司第五十四研究所 应俊俊 惠沈盈 陈秀德
在多种型号雷达等复杂电磁干扰环境下,由于GNSS卫星信号功率微弱,极易受到干扰信号影响,在恢复信号后,针对高于10°仰角的卫星,天线相位中心仍有1cm左右的偏差。
对于高精度测量型接收机而言,阵列天线引入的载波相位误差较大,会导致整周模糊度固定错误,进而引起较大的位置误差,因此,卫星导航抗干扰技术受到高度重视。其中,阵列天线抗干扰技术在空域进行信号处理,利用不同阵元信号的自适应加权合成,在干扰来波方向形成零陷,具有很好的抗干扰性能,因而受到广泛关注。但阵列天线抗干扰的同时也对GNSS 载波相位观测值造成一定影响,进而导致RTK 定位成功率和精度迅速下降,如何在抗干扰的同时实现高精度的RTK 定位也成为GNSS 研究的主要方向之一[1-3]。
1 抗干扰阵列天线设计
高精度测量对天线相位中心的稳定性要求较高,通用的高精度测量型天线相位中心偏差都在2mm 以内,抗干扰阵列天线由于布阵、互耦、单元天线设计等原因,其相位中心偏差会更大,导致定位误差甚至达到分米级以上,无法应用于高精度场景,因此,如何设计高稳定度的零相位中心天线是关键技术之一。
采用基于FSS(频率选择表面)/UC-EBG(共面紧凑型电子带隙)的零相位阵列天线设计及标校技术可解决上述问题,天线阵设计上采用基于FSS/UC-EBG 设计的零相位阵列天线技术,通过加载FSS 天线罩、两馈点微带叠层天线阵元、天线地板加载UC-EBG 等技术手段实现;同时采用基于二维矩阵的阵列天线相位中心标校技术进行阵列接收天线的相位中心标定,经过校正以后,使得阵列天线的相位中心变化量能够满足高精度测量的应用需求。
2 北斗RTK 定位解算
北斗RTK 差分定位解算通过用户抗干扰一体机接收本机的载波相位、伪距观测数据、星历数据,以及通过通信电台接收基准站抗干扰一体机的载波相位和伪距观测数据,依据观测误差的空间相关性,通过差分的方法消除观测数据中的大部分系统误差,从而实现高精度(分米或厘米级)的相对定位。
用户抗干扰一体机u和基准站抗干扰一体机r同时跟踪卫星i和卫星j,则双差伪距、载波相位观测方程如式(1)所示[4]:
对伪距、载波相位双差残差进行分析,可以获取抗干扰一体机的伪距、载波相位精度水平。将用户抗干扰一体机和基准站抗干扰一体机的真值坐标代入式(1),则载波相位、伪距残差可表示为如式(2)所示:
北斗RTK 差分定位解算优先使用载波相位差分定位固定解,模糊度不能固定时使用载波相位差分定位浮点解,无法进行载波相位差分定位时使用伪距差分定位。当差分定位无效(接收的相同卫星数小于4)或无法进行差分定位时,则使用各车地理位置坐标进行车间相对定位坐标解算。
在车辆静止状态下,一旦数传电台和基准站设备开启,若有强干扰,则启用伪距差分定位。除数据传输时延,基本可保证实时定位。若无强干扰,则启用RTK 定位,因基线解固定和收敛,首次定位约耗时1min,后续可实现实时高精度定位。
基于抗干扰一体机,从DSP载波相位提取和高精度数据处理软件方面进行了改善,主要策略体现在:(1)在帧同步获得伪距观测量的基础上,修改了相关积分时间,提高了载波相位提取精度;(2)在数据处理软件中,主要基于载波相位差分,以伪距辅助载波相位进行差分(码载权比为1/100)。
3 试验数据分析
试验数据来源于石家庄市郊收集的BD双频静态数据,基线长度约为4km,截止高度角为10°,采样间隔为1s,总共收集了2015个历元的同步观测数据。数据采集所使用的接收机为自研的抗干扰一体机,B1频点为单阵元,B3频点为抗干扰四阵元。
为评估伪距和载波相位观测量精度,试验中基于B1/B3双差观测模型计算固定解双差残差。在构建双差观测量过程中,选择高度角最高的12号卫星作为参考卫星。此外,为了使残差更好地反映观测误差,试验中代入基线真值,并在残差计算中固定为已知值(即未知参数仅为双差整周模糊度)。
如图1所示为B1频点载波双差残差序列图,如图2所示为B3频点载波双差残差序列图,如表1所示为B1/B3双差残差统计值。

表1 B1/B3双差残差统计值(各统计量取绝对值后取95%)Tab.1 Statistic value of B1/B3 double difference residual (95% after absolute value of each statistic)

图1 B1载波双差残差序列图Fig.1 B1 carrier double difference residual sequence diagram
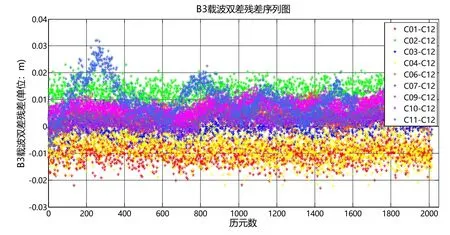
图2 B3载波双差残差序列图Fig.2 B3 carrier double difference residual sequence diagram
从表1可看出,B1频点、B3频点载波双差残差均小于1/4周(5cm),抗干扰天线虽然导致载波相位噪声明显偏大,但是仍然没有破坏B1/B3频点载波相位模糊度整数特性,B3频点载波双差残差均大于B1频点载波双差残差。
从表2可看出,B3频点载波双差残差最大值与最小值之差比B1频点载波双差残差最大值与最小值之差大。因为抗干扰天线不滤噪声,不具备多径抑制功能,相对于高精度天线而言,噪声更大一些。
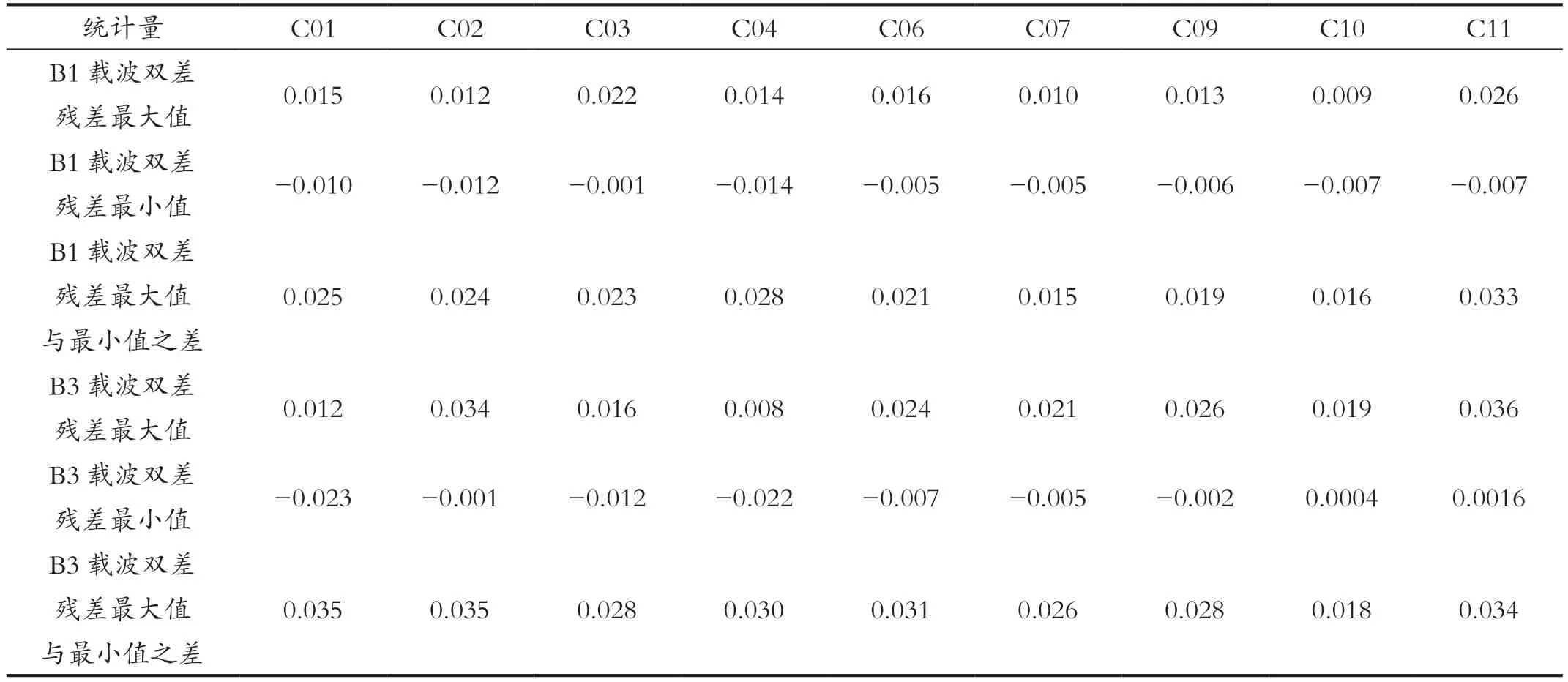
表2 B1/B3 双差残差峰峰值(不取绝对值的最大值、最小值,单位:m)Tab.2 Peak value of B1/B3 double difference residual peak (maximum and minimum values without absolute values,unit: m)
如图3所示为B1/B3双频RTK解算的平面精度序列图,如图4 所示为B1/B3 双频RTK 解算的高程精度序列图。水平精度(取95%)达到0.04m,高程精度(取95%)达到0.06m。

图3 B1/B3 双频RTK 平面精度序列图Fig.3 B1/B3 dual-frequency RTK planar precision sequence diagram

图4 B1/B3 双频RTK 高程精度序列图Fig.4 Sequence diagram of B1/B3 dual-frequency RTK elevation accuracy
4 结语
本文基于实测数据定量分析了抗干扰天线对载波相位模糊度整数特性、北斗RTK 定位性能的影响,试验结果表明:抗干扰天线虽然导致载波相位噪声明显偏大,但是仍然没有破坏B1/B3 频点载波相位模糊度整数特性,采用多阵元抗干扰天线的B3 频点载波相位噪声明显大于B1 频点。在进行北斗RTK 定位处理时,主要基于载波相位数据,以伪距辅助载波相位进行差分(码载权比为1/100),其定位性能水平(取95%)可达到0.04m,高程(取95%)可达到0.06m 定位精度。
猜你喜欢
北京大学学报(自然科学版)(2022年4期)2022-08-18
大地测量与地球动力学(2022年1期)2022-01-11
物流科技(2021年10期)2021-05-12
大地测量与地球动力学(2021年10期)2021-04-17
计算机应用与软件(2018年12期)2018-12-13
计算机测量与控制(2017年12期)2018-01-05
石油地球物理勘探(2017年4期)2017-12-18
测绘科学与工程(2017年3期)2017-08-16
测绘通报(2016年12期)2017-01-06
喜剧世界(2016年24期)2017-01-04
