基于慧鱼模型的多足爬行机器人系统研究
2023-10-14 07:51张芷瑞张硕孙浩于淇姬光辉尹福禄杨名刘亚梅
机械工程师 2023年10期
张芷瑞,张硕,孙浩,于淇,姬光辉,尹福禄,杨名,刘亚梅
(长春工业大学 机电工程学院,长春 130012)
0 引言
在人类发展史上,生产力和生产水平的提高始终推动着运载工具的发展。从手提肩扛到车的发明,再到火车、飞机、轮船等一系列运载工具的出现,人类始终在运载工具的发明和发展上不断探索,使人类的运载不再受到高山的限制和汪洋大海的阻隔。目前,世界上陆地运载工具主要可以分为轮式机械、足式机械、履带式机械3种。轮式移动机构具有移动速度快、效率高、控制简单等优点,但轮式移动机构对移动表面要求较高,仅适用于平坦且无障碍表面[1];履带式机械相较于足式机械,越障能力更强,但是存在结构复杂、机动性差的问题。基于上述情况,科学家应用仿生学原理,发明了一类接触面积更小、越障能力更强的足式机器人。目前,国内外对足式机器人的研究仍处于初步阶段,范大川[2]研究了一种新型并联腿式六足机器人,应用6-SPS并联机构,使其运动平稳,并且能完成越障碍和上楼梯等复杂动作;Li Huayang等[3]将基于爬楼能力的六足机器人进行了尺寸设计,使足式机器人的支腿机构与楼梯间的干涉问题得以解决;曾宣淇[4]对四足机器人进行了竖直跳跃研究,使足式机器人不再局限于行走动作,也可进行稳定跳跃。
本文从慧鱼创意组合模型入手,应用基本的机械结构,设计并组装了一种多足爬行机器人。该机器人成本低、仿生效果好、步态平稳。在此基础上加装了喷水、切割等多功能机械结构,可广泛应用于林业、农业等多个领域。
1 慧鱼创意组合模型介绍
慧鱼创意组合模型是适用于创新教育和创新实验的工程技术类智趣拼装模型,主要有教学模型、培训模型、工业模型三大系列的各种组合包,利用工业标准的基本构件,辅以传感器、控制器、执行器和软件的配合,可以实现任何技术过程的还原,有利于大型机电设备正式投产前的模拟再现。此模型有助于提高大学生的创新能力与实践能力[5]。
2 机械结构设计
本文开发的多足爬行机器人主要包括行走机构、液体喷洒机构和切割机构,总体模型如图1所示。
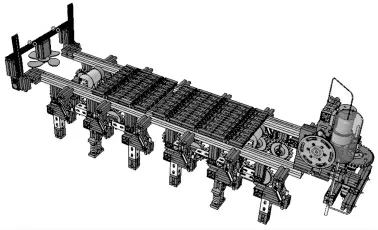
图1 机器人总装CATIA模型
2.1 行走机构机械结构设计
机械行走部分采用曲柄摇杆机构,辅以电动机驱动和齿轮传动。行走机构的三维模型如图2所示。电动机驱动齿轮转动,利用齿轮啮合将电动机转动时的动能进行能量传递。机器人足部的曲柄安装在齿轮上,并且间隔安装,以保证步态一致。左右两侧足部结构对称。齿轮转动时,安装在齿轮外缘的曲柄做定轴转动,同时曲柄的轴端与腿的T字形杆一端相连,驱动腿部做椭圆运动。两侧连接端均以连接点为轴进行转动。由于齿轮上曲柄和腿部T字形杆运动范围受机构限制,因此直杆的摆动范围也有一定限度。足部T字形杆的设计分为两类:一类是与地面硬接触的足部T字形杆,此类杆件在运动时与地面的静摩擦力较大,动能损失更小,能够给予机器人更大的推动力;另一类是通过安装弹簧实现与地面软接触的T字形杆,此类杆件在与地面接触时可以通过弹簧来减轻载物台的振荡,从而使载物台在机器人前进状态下载物更平稳,达到在机器人行走过程中进行充分减震的目的。在整机中,共用4套相同的传动机构,以扩大载物台的面积并保证机器人前进过程中的稳定性。
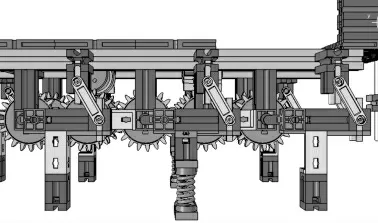
图2 行走机构CATIA模型
2.2 液体喷洒机构机械结构设计
农作物生长发育过程经常遭受到病菌、害虫、杂草等生物的侵害[6],在清洁工作等其他作业过程中也有进行液体喷洒的需求,因此在载物台上方添加了基于慧鱼创意组合模型的液体喷洒机构以提高该机器人的实用价值。液体喷洒机构的三维模型如图3所示。小型电动机驱动同步带机构旋转,同步带机构中的大滑轮驱动同轴的曲柄转动,曲柄与活塞底部相连,曲柄转动过程中驱动活塞上下移动,将气体鼓入液体储存缸,进而增大了液体储存缸内的大气压强,在气压的作用下,液体被压入导管,并从喷嘴喷出。喷嘴与丝杠导轨驱动的升降机构相连,在电动机驱动丝杠导轨机构升降时,喷嘴上下运动,从而增大了液体的喷洒范围。
2.3 切割机构机械结构设计
机械除草是一种绿色环保的杂草清除技术,是最为理想的杂草清除方式之一,同时,在许多特种作业中,往往需要将前方障碍物通过切割的方式进行去除。在机器人载物台上添加了可升降的切割机构。切割机构的三维模型如图4所示。在设计中,由于慧鱼创意组合模型的零件限制,切割刀具采用扇叶进行替代。为保证切除的充分性和工作效率,在已有的行走机构前进(后退)的自由度基础上,应用由齿轮齿条组成的十字滑台添加了水平移动和上下移动两个自由度,以此来扩大切割的范围。

图4 切割机构CATIA模型
3 电气控制部分设计
3.1 工作流程设计
基于上述机械结构和预想的机器人能够实现的功能,设计并梳理出图5所示的机器人工作流程图。机器人上电,工作开始,首先要确定本次工作要执行的任务是载物、切割还是液体喷洒。如果是载物,则要通过电气控制,确定运载的方向;如果是切割,则需要在工作前确定待切割物体所在位置,通过循迹定位、滑台微调,确定位置后电动机进行高速旋转切割粉碎障碍物;如果是喷洒,前期定位工作流程与切割相似,只需在后期对气缸进行电气控制,将气体压入储液缸,以增大气压,进行液体喷洒。

图5 机器人工作流程图
3.2 电路设计
控制器的选择恰当与否、是否与其功能相匹配、电路设计是否科学是影响机器人正常运行的关键因素。在本机器人运行过程中,应用到最多的执行机构便是电动机,而单片机在工控中的应用便是实现对电动机的精确控制[7],故依据单片机原理,应用机电接口技术[8],采用MCS-51单片机辅以额定电压为9 V的电动机,对该机器人进行电气控制。机器人的控制电路如图6所示。使用单片机的两个I/O脚控制直流电动机的转速和旋转方向。其中P2.6脚输出PWM信号以控制直流电动机的转速,P2.7脚用来控制直流电动机的旋转方向。图6中的驱动电路使用了NPN低频、低噪声小功率达林顿管2SC2547。当P2.6=1时,P2.7发送PWM信号,直流电动机正转;反之,当P2.6=0时,P2.7发送PWM信号,直流电动机反转。通过改变PWM信号的占空比,从而实现对直流电动机转速的控制。通过调整直流电动机转速,使机器人前进和后退的速度得以控制,通过调整直流电动机转向,使机器人的行进方向得以灵活选择,更加提升了机器人工作的灵活性和实用性。

图6 机器人电路图
3.3 程序设计
基于3.1节中所述的工作流程和3.2节中所述的电路原理,应用KeiluVision4编译器对该电路进行程序编写和控制。机器人的程序控制思路可用图7所示的流程图清晰表示。首先对接口定义,定义P2.6控制电动机的转向,P2.7产生PWM波,然后通过确定电动机正转与反转的时间来对机器人前进与后退的时间进行调节。在程序编写中,通过判断语句使电动机判断是否到达预定的正转或反转时间,若到达,则回到信号发射周期的起始位置继续发射高电平或低电平,使电动机正转、反转循环工作,若电动机未达到指定时间,则需要继续完成该项工作。
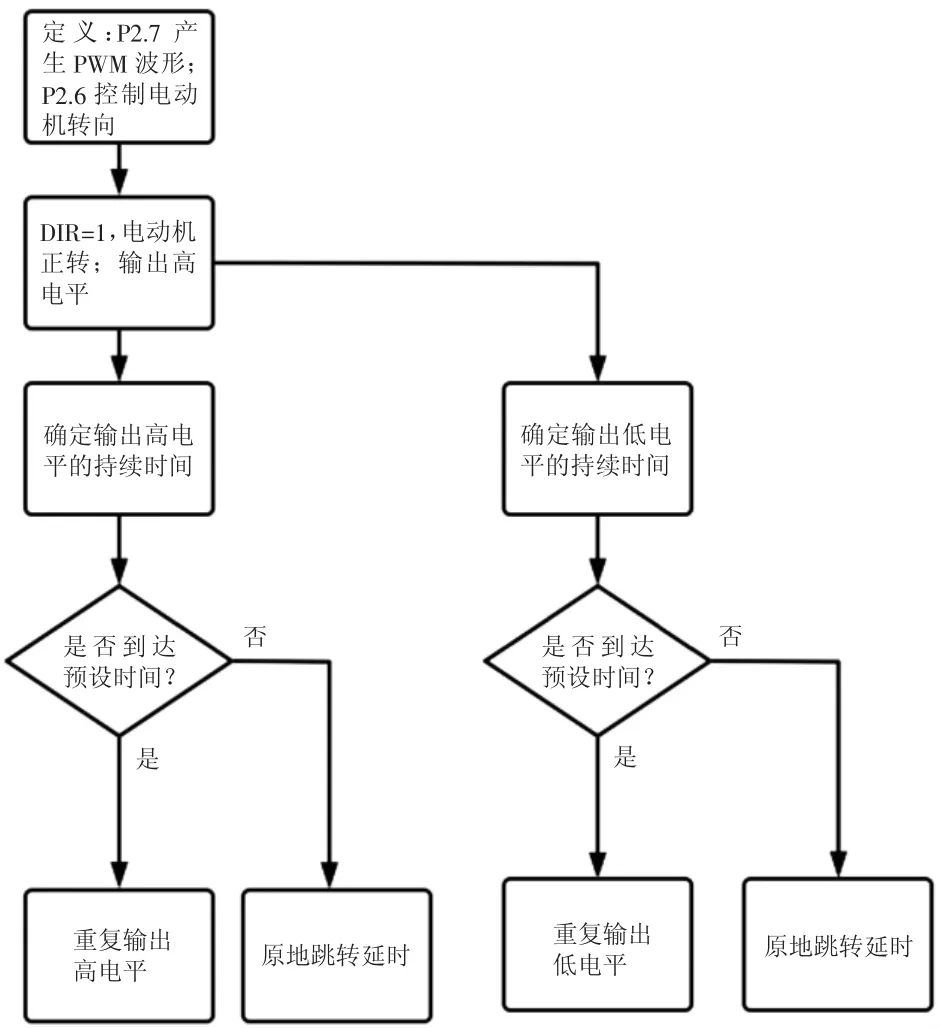
图7 程序设计思路
4 实物样机调试
根据图1所示的CATIA三维模型,对该机器人进行了实物组装和样机调试,机器人实物如图8所示。调试过程中在空载状态下机器人依照预先设计的行走步态走完了预想的轨迹。在机器人载物台上加上了适量的载荷,机器人也能够走完预想的轨迹。将机器人放在不同地形的模拟沙盘上,机器人也能够完成行走,且载物台平稳,不发生颠簸。同时,在调试中,为了验证液体喷洒机构和切割机构的工作性能,同时保证实验的安全性,在储液缸内加入了自来水,通电后在电气控制下,液体能够顺利喷洒;将假草平铺在地面上来模拟待切割的物体,通电后电动机驱动扇叶所替代的“切割刀”旋转,没有受到“切割物”的阻碍。实物调试的成功,进一步验证了所开发的多足爬行机器人系统满足了设计要求,实现了预期功能。

图8 机器人实物图
5 结语
本文基于慧鱼创意组合模型,设计了一种多足爬行机器人系统,在设计中充分考虑了机器人的机械特性和实用价值。应用了CATIA三维建模软件对机器人进行了机械结构设计,应用AutoCAD软件和MCS-51单片机对机器人进行了电路设计和程序设计。此后又应用慧鱼创意组合模型的零件对机器人的机械结构进行了搭建,对机器人的电气控制系统进行了电路连接和程序编写。最后进行了通电测试,机器人实现了预想的结构与功能。目前该模型还停留在慧鱼创意组合模型阶段,但是在自动化、智能化的大趋势和大背景下,该机器人的设计理念和工作原理值得推广,在载物台上方更换不同的机械系统使之应用于不同的领域,或者应用理论力学、材料力学等基础学科的相关原理,对机器人的材料性能、机械特性进行更精准、更科学的评估和改良。
猜你喜欢
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
机械工程师(2021年4期)2021-04-19
设备管理与维修(2019年22期)2019-12-19
新教育论坛(2019年14期)2019-09-10
机械研究与应用(2018年5期)2018-11-05
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
电子世界(2014年23期)2014-10-21
河南科技(2014年6期)2014-02-27