STAP在机载雷达对海面运动目标检测中的应用
2023-10-12 07:22王金峰刘仍莉顾庆远
火控雷达技术 2023年3期
王金峰 刘仍莉 顾庆远
(1.中国电子科技集团公司第三十八研究所 合肥 230088;2.孔径阵列与空间探测安徽省重点实验室 合肥 230088)
0 引言
雷达是一种工作于微波频段的主动探测设备,不受天气、光照、目标温度等因素的影响,且工作距离远、覆盖范围宽,是高效的海面监视装备。机载雷达在对海面运动目标探测时,回波中不仅包含了目标的信息,也包含了大量的来自于海面的非期望信息(一般被称为海杂波)[1-2]。
传统的机载对海面目标检测时采用超低副瓣的和波束天线,信号波形分为捷变频和固定频点的非相干处理波形和相干处理波形,前者通过频率捷变使海杂波去相关,后者通过多普勒滤波器组实现杂波的抑制和目标的相干积累。因其结构简单、运算量低得到了大量的工程应用[2]。
为了提高海面目标的检测性能,学者们从不同的角度提出了大量的处理方法。一类是对传统方法的精细化发展,对海杂波建立统计模型,并根据统计模型参数选择合适的检测器:如最大选择或最小选择、排序CFAR,广义似然比检测,自适应匹配滤波,K分布下的最优检测器,广义Pareto功率分布下的最优广义似然比现行门限检测器等;另一类是新的理论方法引入到海面目标检测中来,如基于海面分形和混沌特征的方法、基于特征的人工智能方法等[2]。
随着雷达系统技术的发展,多通道系统已广泛应用,并结合空时自适应处理(STAP)技术在地面运动目标检测(GMTI)和对空中运动目标检测(AMTI)中取得了较好的杂波抑制效果,提高了杂波中运动目标检测的性能[3-5]。德国Valeria.G等利用多通道试验系统数据,分析了海杂波的空时特性及杂波抑制的方法[6]。王金峰等利用双通道的机载雷达实测数据验证了双通道进行空时杂波抑制的方法[7]。黄鹏辉等提出了多通道系统的子空间投影杂波抑制方法,并利用仿真数据进行了验证[8]。多通道系统对海面运动目标的检测正受到越来越多的关注。
本文基于机载多通道对海运动目标检测雷达的实测数据,在多通道系统进行建模的基础上,分析了海杂波的空时特性,设计了STAP应用到机载多通道对海面目标检测中的应用方法,实现海杂波的抑制。对实测数据的处理验证了算法的有效性。
1 多通道系统回波模型
雷达阵列指向机头方向,通过相扫实现区域的覆盖。对于面杂波下的运动目标检测,特别是慢速运动目标的检测,一般采用低重频的工作模式。如图1所示,M子阵的阵列沿y轴均匀分布,子阵间距为d,载机在高度H处沿天线法线方向x轴运动。那么,方位角为α,俯仰角为β的散射点,对于线性调频信号系统,脉压后的各子阵响应可表示为

图1 多通道雷达系统几何

(1)

(2)
在远场条件下,忽略每项前的sinc型包络调制项差异,以第1个子阵为参考,则目标所在单元的空间维信号可表示为
(3)
其中α为方位角,β为俯仰角,t为脉冲时间。
对于静止的散射点,目标与雷达的距离变化来源于雷达的运动:
R1(t)=R1(0)-2vptcosαcosβ
(4)
其中vp为雷达载机的地速,其对应的多普勒频率可表示为
(5)
可见多普勒随空间角度的变化而变化,即多普勒的局部化可对应空间角的局部化,因此,可以方便地采用降维的空时自适应处理方法实现地面杂波环境下的杂波抑制,且已得到了广泛的应用。
对于海面的散射点,目标与雷达的距离来源于雷达和海浪的综合运动,且复杂的海浪运动分量,对应着不同的空间分布,此处将海杂波的多普勒频率表示为式(6)所示。
(6)
其中vs为海面散射体本身的运动速度,∑(·)表示对所有的可能组合求和。
2 海杂波空时特性分析
从海杂波的多通道回波模型可见:相对于地面静止杂波,海杂波由于自身的运动在多普勒维度上增加了vs项,且不同的vs值对应不同的空间角度。下面从海杂波的多普勒分布与空间主分量及空间相位差的角度,分析海杂波的空时分布特征。
2.1 空间分量的分布特点分析
空时两维的局部化处理是STAP降维处理的主流思路,其中以1DT和3DT为代表的mDT类算法[4],得到了广泛的应用。其应用的前提首先是多普勒维的局部化对应空间维的局部化。因此,首先将脉冲时间维的S(t,α,β),转到多普勒维,如图2所示为其中一个子阵的距离多普勒分布图。可见海杂波主要集中分布在一定的多普勒通道上,表明海杂波在脉冲间保持了一定的相干性,可以实现杂波多普勒维的局部化。

图2 距离多普勒分布
构建多普勒通道fdn的子阵空间维信号矢量为
S(fdn,τ)=[s1(fdn,τ),…,sM(fdn,τ)]T
(7)
此时信号序列仅包含了空间信息。因此,通过统计协方差矩阵的特征分解获得各信号空间分量的分布情况。首先构建空间维信号的协方差矩阵为
(8)
其中τi为距离快时间维采样时刻,P为样本点数。进行协方差矩阵的特征分解如式(9)所示。
(9)
其中:U为特征矢量矩阵,其列为特征矢量;Λ为对角矩阵,对角元素为实数,其对应各特征矢量的能量。如图3所示,为4通道子阵系统的海杂波分量在各多普勒通道内的分布曲线,在天线主瓣区域存在两个较大的杂波分量,第三个分量虽不大,但也可见能量的起伏,最小的分量可认为系统的噪声分量,其几乎没有起伏。

图3 多普勒通道的特征分量分布
特征矢量对应了各空间分量的特征子空间,此处通过空域频谱分析可得到该空间分量的空间角度,如图4所示。

图4 海杂波分量的空间分布
可见两个主要分量的对应空间角度存在一定的差异。这从实测数据的角度验证了式(6)的正确性。
通过以上对多普勒局部化后的海杂波空域分量分析,可见海杂波可以满足多普勒维的局部化,且多普勒局部化后空间维度也可以实现局部化。因此,存在进行降维空时自适应处理的前提。
2.2 特征随距离的变化
从图2海杂波的距离多普勒分布可见,海杂波的强度随着距离的增加,杂波的强度逐渐变弱。为了分析海杂波分量随距离(对应固定高度的载机平台,对应着海面入射角)的变化情况。对不同距离段的特征分量进行分析,典型的特征分量分布情况如图5所示。

图5 不同距离时的特征分量分布
由图5可见,随着波束入射角的减小,海杂波强度变低,各分量的幅度也随之减低,大幅度分量间的幅度差也随之降低,主要分量的数量也随之减小(由图3的第三分量可见起伏,到图5(a)的第三分量强度趋于噪声水平和图5(b)的第二分量强度也趋于噪声水平)。
3 基于空时处理的海杂波抑制
通过多通道机载系统实测海杂波特性的分析可知:海杂波(特别是强海杂波)在相干处理时间内具有一定的时间相关性,可通过多普勒滤波器组(通常采用FFT方法)降低海杂波的时域维度;多普勒滤波后的海杂波在空间维上分量比地面杂波自由度高,但有限。因此,本文采用基于mDT的空时处理算法进行海杂波的抑制。另外,随着距离的变化,海杂波的特性存在差异。因此,在实际的应用中采用距离分段的思路降低距离变化的影响。
3.1 样本综合选择策略
自适应滤波器Wopt的构建可表示为
Wopt=σR-1D
(10)
其中:σ为归一化系数;R为协方差矩阵的估计,其代表了目标所处环境的统计特性;D为导向矢量,代表了滤波器的意愿。由此可见,其主要包括两个关键因素:一是统计协方差矩阵的构建;二是导向矢量的选择。
在实际工程应用中,导向矢量可以由先验知识或者扫描覆盖的需求进行定义,可自由定义。那么,协方差矩阵的估计就成了自适应滤波器构建的关键。而协方差矩阵估计的关键在于样本的选择,本文采用幅度信息与统计NHD(非均匀检测)相结合的综合方法实现样本的选择。
3.1.1 基于幅度的选择方法
海面杂波通常可认为由Bragg散射、Burst散射和Whitecap散射三个不同特征的分量组成,其中Bragg散射与谐振的毛细波有关,广泛且均匀地分布在各个距离单元上;Burst散射和Whitecap散射主要由海浪的整体运动和波冠的破裂产生,其随海浪的周期在距离上周期起伏[1],如图6所示。小幅度样本的引入将导致杂波的功率估计不足,带来杂波抑制的不足。因此,首先对当前多普勒通道,当前距离段的幅度排序,仅选择一定比例的强幅度散射点作为样本。

图6 海杂波沿距离的周期起伏幅度
另一方面,在雷达海面目标检测的应用中常常出现强散射的目标点,以致于该散射点的加入严重影响了后续的NHD检测。因此,基于目标稀疏的假设,实际应用中将幅度最大的一定数量的样本不选入协方差矩阵的估计样本中。
3.1.2 基于排序剔除的APR方法
在通过幅度选择后的样本中,可能存在较弱的运动目标单元。因此,通过NHD实现样本的进一步剔除。在NHD算法中,自适应功率剩余(APR)具有较好的性能并得到了广泛的应用[5],其迭代改进型采用迭代的方式每次剔除一个“最不均匀”的样本,直到所有剩余的样本趋于均匀,降低了非均匀样本在计算过程中对统计特性的估计误差,提高了性能[9]。
在实际的应用中,单次APR的性能受限、迭代改进型APR的效率又不能满足系统需求。本文将迭代APR的单次剔除效率提高,在性能损失有限的情况下,仅需要少量的迭代即可实现非均匀样本的检测,平衡了工程应用的性能和效率。
设样本集Ω中的样本数为K,每次剔除的非均匀样本数比例为μ,主工作波束方向对应的导向矢量为D′,迭代计数k=0,m(0)=0,收敛容差ζ为一接近零的数,最大迭代次数E,实现步骤如下:
1)以当前样本估计协方差矩阵为
(11)
2)计算样本集中每个样本的功率剩余值为
(12)
3)将功率剩余值进行排序,并将最大的μK个样本从样本集Ω中剔除;
4)迭代计数k=k+1,并记录第μK个功率剩余值记作m(k),更新样本数量K=(1-μ)K;
5)循环以上步骤,直到|m(k)-m(k-1)|≤ζ或者k>E终止。
通过以上的样本选择后,既可保证样本具有较好的能量以实现杂波的抑制,又可以避免非均匀样本(特别是目标)参与环境统计的估计造成目标的损失。
3.2 基于mDT-STAP的算法流程
mDT类STAP降维方法首先将脉冲维转换到多普勒维,利用机载雷达运动带来的空-时对应关系实现空时解耦,达到降低时间维空域自由度的目的。该类算法对系统的精度要求较低,已在工程上得到了广泛的应用。
为了适应海杂波强度随雷达波束擦地角的变化,以及工作区域内海浪速度的变化,本文采用基于距离分块的空时算法进行海杂波的抑制。算法的流程如图7所示。
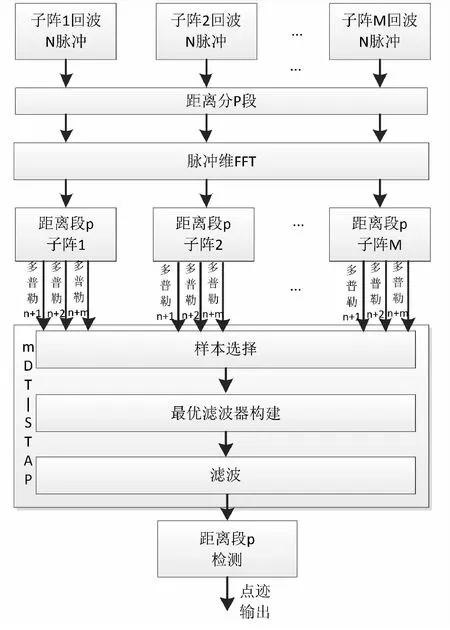
图7 基于距离分段的mDT-STAP算法流程
1)首先将多个子阵接收的回波按照距离分为一定数量的回波块,在实时处理中可将不同距离块的数据分发到不同的处理单元进行并行处理;
2)对每块数据沿脉冲维通过FFT由脉冲维转换到多普勒维,完成多普勒维的局部化。再利用相邻的m个多普勒通道与M个子阵通道构建频空信号矢量为
(13)

3)对X进行样本选择;
4)根据式(11)进行协方差矩阵估计;
5)根据式(10)构建最优滤波器;
7)逐多普勒通道进行遍历,得到第p距离段的海杂波抑制结果;
8)对所有的距离段进行遍历后进行CFAR检测得到目标的检测结果。
4 试验数据的处理
某X波段机载试验雷达的天线采用4子阵配置,在某海域海面运动目标检测试验过程中采集了部分海面回波数据。如图8所示为采用3DT-STAP算法时,海杂波抑制前后的距离-多普勒能量分布图,图9为多个距离单元统计的多普勒维能量分布图,可见海杂波抑制前杂波能量在波束主瓣区较强,采用空时自适应处理后的主杂波得到了较好的抑制。

图8 海杂波抑制对比图
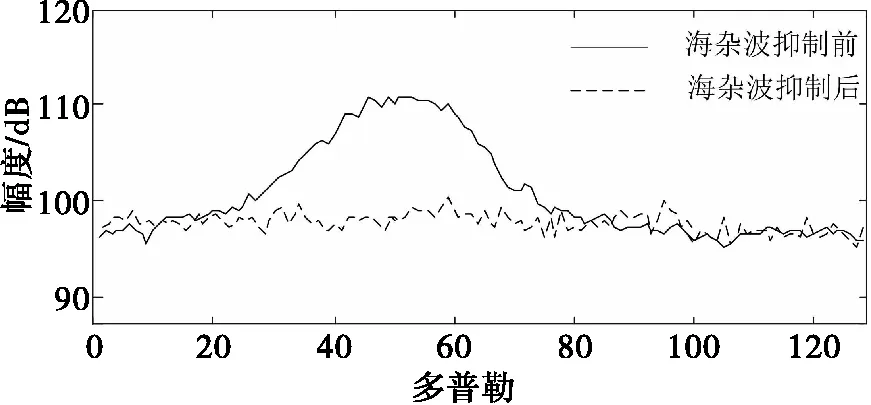
图9 海杂波抑制前后的多普勒维能量分布
某目标(如图10(a)所示,多普勒单元77,距离单元446)分布在主海杂波区域的附近,在进行海杂波抑制前,其信杂噪比条件无法满足有效的检测(如图10(c)中的虚线)的需求。采用本文提出的方法进行海杂波的抑制后,目标附近的海杂波得到了抑制(如图10(b)所示),目标被保留了下来。同时由图10(c)的实线可见,目标的信杂噪比得到了明显的提升,可实现有效的目标检测。
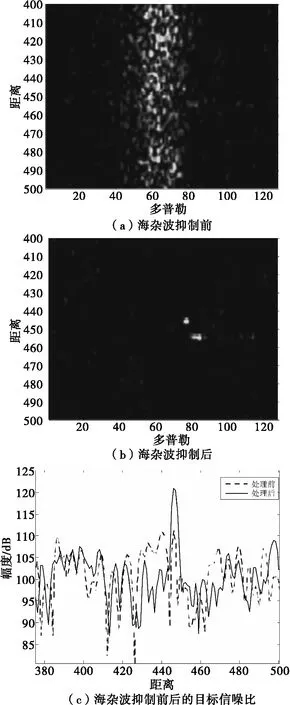
图10 空时处理的效果对比
5 结束语
本文通过对机载试验雷达对海回波数据的分析,得到了海杂波在多通道雷达系统中的空时分量特性。基于海杂波的特性,通过排序剔除的APR算法实现了非均匀样本的选择,通过基于距离分段的mDT-STAP算法实现了对海杂波距离-多普勒-空域的局部化,提高了算法对海杂波的适应能力。最后通过试验数据的处理验证了算法的有效性。
猜你喜欢
作文新天地(小学版)(2022年8期)2022-05-30
科学与信息化(2021年30期)2021-12-24
红蜻蜓·低年级(2021年2期)2021-07-20
小学科学(2020年6期)2020-06-22
小学生导刊(2017年18期)2017-05-17
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
自动化学报(2016年8期)2016-04-16
西北工业大学学报(2015年3期)2015-12-14
遥测遥控(2015年2期)2015-04-23
现代防御技术(2014年6期)2014-02-28