神经网络提升低成本软件定义的无线电无人机探测平台定位准确率研究
2023-10-12 16:21夏鸿何泉蒲磊曾超罗正华
成都大学学报(自然科学版) 2023年3期
关键词:神经网络
夏鸿 何泉 蒲磊 曾超 罗正华


摘 要:展示了用于比幅法测向的自研低成本软件定义无线电(software defined radio,SDR)系统,同时针对比幅法测向精度较低的问题,探讨了用来提升测向精度的神经网络,并重点验证了神经网络对自研系统接收信号的测向精度的提升程度.实验验证表明,对于自研系统接收信号在神经网络优化后的测向精度相较于直接通过比辐法解算接收信号的测向精度普遍有提高,其中性能最好的优化算法测向精度提高了近10%.因此,低成本硬件平台与神经网络形成了低成本且高精度的测向定位解决方案.
关键词:比幅法;神经网络;低成本解决方案
中图分类号:TP183;V279
文献标志码:A
文章编号:1004-5422(2023)03-0262-07DOI:10.3969/j.issn.1004-5422.2023.03.007
0 引 言
近年來,无人机产业发展迅速,在众多领域都取得很好的应用效果[1].同时,由于其成本低廉且易于获取的特性,机场、大型体育场馆及大型人员密集场所等需要严控非合作型无人机的侵扰.目前,不少高校、科研院所和企业都在努力解决非合作型无人机的防控问题.如果按照非合作型目标的运动特点来分类,无人机属于典型的“(飞行高度)低、(飞行速度)慢、(体积)小”类目标,所以要想防控该类目标,首先需要对其进行快速发现与精准测向定位,然而对于非合作型“低、慢、小”目标,快速发现和精准测向定位却是公认的难题[2].
无源信号探测技术主要通过对探测目标无线控制信号及其回传信号(如无人机图传信号)进行被动探测和接收,由于不主动发射电磁信号,只是靠被动接收信号进行处理分析,因而直接使用该技术存在测向精度较差的问题.但是,采用该类技术的设备电磁辐射小,无频谱干扰,对工作环境要求不高,体积通常较小且易于干扰压制设备联动.因此,如何发挥该类技术的优势并通过其他技术创新规避其缺点就特别具有探讨的迫切性和价值.
目前,无源测向系统主要是基于地面的固定多站无源测向定位系统,其主要研究和应用多集中在空间轨道飞行器对目标的测向定位,比如由中国电子科技集团公司先后研制的 DWL002 无源探测雷达系统和 YLC-20 双站无源测向定位系统[3].而基于无人机的测向定位研究相对较少,且主要集中在近几年,例如,国防科技大学通过相关干涉仪对遥控及数传信号进行测向,并对其测向定位算法进行分析[4].另外,东南大学相关团队对无人机信号的特征估计进行了探讨,并对到达时间差(time difference of arrival,TDOA)估算算法进行了改进[5].在国外,也有很多国家开展了“低、慢、小”目标测向定位技术研究[6].另一方面,随着人工智能技术特别是神经网络算法在各个领域的成功应用,国内外陆续有研究者和团队尝试使用人工智能的相关算法来解决测向定位问题.中南大学团队使用卷积神经网络识别地下矿井中微地震事件的源位置[7].上海海事大学的研究者利用随机森林结合深度学习模型,并在结合天线阵列信息的基础上实现对运输设备及特殊货物的定位[8].巴西坎皮纳斯大学团队应用支持向量机的方式对多天线信号波到达角进行预测分析[9].韩国九州大学的研究者在TDOA定位中使用了机器学习,采用深度神经网络减小TDOA中的定位误差[10].日本琉球大学团队采用基于决策树的改进算法来解决移动目标定位问题[11].由此可见,使用人工智能技术来解决测向定位问题或提高测向定位问题解决方案的精度是一种发展趋势.
本研究主要介绍自研的低成本可重构无人机测向定位技术硬件平台.该平台包括定向天线(4天线阵)、多通道接收机、数据处理平台及角度解算软件等主要软硬件模块,可接收无人机图传信号进行比幅法目标测向.为了克服无源探测技术精度较低的不足,本研究还创新性地提出深度神经网络模块,利用神经网络技术较强的数据拟合能力进行测向精度的提升,获得较好实际效果.
1 基本原理
1.1 自研无人机探测平台
由于着眼于低成本硬件的解决方案,本平台采用支持SDR的零中频(Zero-IF)接收机,相较于超外差接收机具有体积小且成本低的优势.该接收机的主要参数如增益、相位及工作频段等皆支持重配置,且数字信号处理算法可重编程.整个硬件平台不论是与其他设备的集成还是升级,都较灵活[12].
1.2 比幅法
比幅法(amplitude comparison approach,ACA)用多个独立且波束主瓣比邻的天线覆盖 360° 的方位,对相同入射信号来说,总有1对相邻波束分别输出最强和次强信号,通过比较这对相邻波束输出信号包络幅度的相对大小来确定信号的方位[4].如下假设:天线方向满足图1所示的振幅方向对称性.
当雷达方向位于任意2个天线之间且偏离天 线等信号方向的夹角为θ时,若天线方向图采用高斯函数分布:
1.3 神经网络
神经网络属于运算模型,由大量节点(称为神经元)相互连接构成.每个节点代表1个激活函数,表达函数为H(X).每2个节点间的连接都代表1个对该连接信号进行的加权,称为权重, 表达为W或ω.网络的输出则取决于网络的结构、连接方式、权重和激活函数,而网络自身通常都是对自然界某种算法或函数的逼近.
人工神经网络(artificial neural network,ANN)指的是由大量神经元相互连接而形成的复杂网络结构.它按照一定规则将许多神经元联系在一起,并行处理外界输入的信息.ANN由前向神经网络和反馈神经网络组成,其中,前向神经网络负责输出的形成和损失函数的计算,反馈神经网络则依据选择的优化方法和激活函数反向传导计算误差,并根据误差来调整每个连接的权重.
神经网络的架构是由多个神经元构成层级结构.其中,每层都是前面那层的函数,每层的主体都是线性模型,并由激活函数对线性模型进行非线性映射.架构通过矩阵乘法将特征映射到输出,实现识别和回归.
第1层结构如下所示:
式中,y(1)表示第1层的输出矩阵,x表示第1层的输入矩阵, W(1)T、b1表示第1层的权重信息矩阵与偏置矩阵,h(1)表示第1层的激活函数.与此相同,其余n层满足以下结构:
式(7)的y(n-1)表示上层网络的输出.该模型具备易于训练的特点,并且在使用线性模型时,可用许多损失函数把问题导出为凸优化问题.网络加了非线性隐藏层的前馈网络,对于解决非线性问题提供了支撑.由于每个激活函数都可以将局部(每个神经元自身)的线性模型进行非线性映射,在通过多级级联后,整个神经网络模型就会获得强大的非线性表示能力,从而可以表达输入与输出之间的非线性关系.
1.4 自研平台与比幅法及神經网络结合的原理
由式(5)可知,比幅法中角度与信号幅度(或信号幅度之比)之间的对应关系是非线性的.接收信号强度的误差会因为该非线性对应关系而被放大,造成解算出的角度误差较大.因此,比幅法的解算精度对接收平台的硬件性能要求极高.另一方面,比幅法又因为原理简单常被用于低成本解决方案,使得使用这些方案的测向结果误差较大.神经网络具有丰富的非线性表达能力,如式(6)与式(7)所示.单个神经元的激活函数赋予神经元本地非线性表达能力,则大量神经元通过级联方式使得整个网络具备表达输入与输出间复杂的全局非线性关系的能力.所以,只要使用同平台定标飞行时的数据对神经网络进行训练,神经网络就能学习该平台输入信号与输出角度之间的对应关系模型.训练好的模型自动考虑接收信号的误差,避免了接收信号误差通过非线性关系在输出角度中的放大作用,可以很好地弥补自研比幅法平台由于聚焦低成本解决方案而带来的硬件缺陷,从一定程度上提高了结果精度.
自研探测平台与比幅法及神经网络结合硬件如图2所示.自研低成本平台通过无源定向天线阵探测无人机数传信号,探测到的信号由平台上的AD9361进行接收.数据处理模块使用Xilinx74020作为数据转发中心,将接收到的信号进行简单预处理(120次采样累加,从数值上提升接收信号的幅度)后传送给数据处理接收机终端.
终端运行MySQL数据库,存储无人机数传信号数据.终端上运行的比幅法解算程序读取数据库中的记录,按照比幅法原理解算出当前接收信号所对应的角度值.同时,终端上也运行着训练好的神经网络.神经网络使用与比幅法相同的输入信号(数据库中的记录).由于神经网络结构上的特殊性(选定结构后,输入层神经元恒定),输入信号读取后会做相应的组合,形成输入矩阵,且矩阵的第1行应等于输入层神经元的个数.由于本平台使用4天线阵列,因此神经网络输入层为4个神经元.相应地,神经网络的输入矩阵行数也为4.读入输入矩阵后,输入信号通过训练好的神经网络层层前馈,最终在输出层产生输出角度值.对于相同信号,本研究将神经网络的输出与比幅法解算的输出进行比较,进而探讨基于自研平台所接收的相同信号时神经网络相对于比幅法的提升程度.
2 测向实验
本研究将自研的基于SDR的无人机探测平台用于测向实验,并把实验所获数据输入到数据处理接收终端(工作站服务器)上运行的神经网络,随后将对神经网络输出的角度误差进行分析,论证神经网络对自研无人机探测平台探测精度的提升能力.
2.1 实验场景
本研究将进行测向实验的实验环境选定在四川省成都大学校内.2个测量站分别位于2栋建筑楼顶开阔区域,且定位站A位于建筑A楼顶,定位站B位于建筑B楼顶[13].2个定位站均选用了4天线阵,如图3所示.该天线阵的覆盖范围为阵列正前方,以左侧延长线为0°,逆时针旋转至180°的开放半圆形范围.天线阵后向连接自研硬件平台,然后再与工作站服务器(PC端)相连.定位站A与定位站B间距为279 m.布站示意图如图4所示.
被测向对象为大疆精灵3小型无人机,实验飞行半径为距离飞手40 m、50 m及60 m.飞手朝向与4天线阵覆盖方向一致,操作无人机在正前方0°~180°内确定高度飞行.定位站A和定位站B用于对被测无人机多次航行所得接收信号进行测向定位.
2.2 参数说明
表1总结了实验参数,其中,二维数据结构 (S_num,D_dim)表示天线阵列所采集到的数据矩阵.S_num为样本数量,D_dim为每个样本的维度数量.由于实验采用4天线阵,所以每个接收样本的维度与天线数量一致,均为4.每维表示对应天线上的样本特征值,即信号幅度值.另外,R_len表示无人机相对飞手航行的半径,T_sail表示航行时间,C_cir表示航行的半圈数,V_sec表示航行平均速度,D_dis表示2个站之间的距离.
3 实验结果与分析
本研究采用的提升比幅法测向精度的深度神经网络结构参数如表2所示.其中,输入特征量为4*2矩阵.矩阵的2列分别为定位站A和定位站B所接收信号经过预处理后的幅度累加值,每列4个值分别是各定位站4天线阵中每个天线接收信号经过预处理后的累加值,因此,输入特征量为4*2矩阵.
3.1 实验结果
本研究选择4种算法对比幅法的定位估计进行测试,如图5所示.其中,图5(A)、5(B)、5(C)、5(D)、5(E)分别为原始ACA数据判别图、IRLS优化测试图、SGD优化神经网络测试图、Adam优化神经网络测试图与Nadam优化神经网络测试图.
通过比较发现:
1)由图5(A)和5(B)可知,ACA结合定位站间的空间关系信息(即定位站间距)能初步实现对测向目标初步测向定位,但测向效果不太理想.在测向信号盲区(175°附近)、数据抖动或者异常(25°、75°、125°附近)时,有较大波动出现.而IRLS优化算法能处理该异常情况,虽然可以大幅度减少数据间抖动,解决大部分测向信号盲区问题,但依旧存在信号数据盲区(165°~175°附近)角度和位置信息不能估计的问题(75°、150°附近).
2)引入了神经网络的SGD优化算法同样具有测向定位能力.由图5(C)可知,该方法和IRLS优化算法一样,可以解决抖动问题,有较好鲁棒性,也可以部分解决数据异常问题,并且由于引入神经网络作为工具,而神经网络这类机器学习算法具备预测能力,这为解决数据盲区问题提供了可能性.由图5(C)横坐标最右侧区域(即角度值为180°左右)的图像可知,相比ACA和IRLS算法,神经网络SGD优化算法对该数据盲区作出了较合理的预测,一定程度上解决了数据盲区的问题.但从图5(C)整条曲线来看,由于整条曲线斜率起伏较大,说明该方法仍存在角度和位置信息精度较差等不足.
3)Adam与Nadam优化神经网络算法的结果分别见图5(D)和5(E).相较于SGD优化神经网络算法,此2种算法得出的曲线更加平滑,对角度和位置信息的估计更加精确,更加接近实际测向目标移动的趋势.另外,与SGD算法一样,Adam与Nadam优化神经网络算法都能解决数据盲区、抖动及数据异常的问题.
4)不改变数据样本数量时,Adam和Nadam处理效果十分接近,但在细节处(尤其是曲线中段,约60°~125°处)可发现,在神经网络结构一定的情况下,使用Nadam优化算法的神经网络波动比使用Adam优化算法的神经网络波动小,即预测角度和位置信息的方差更小且收敛性更好,即图5(E)中所绘曲线比图5(D)中所绘曲线更加平滑、更加接近实际被测目标的运动趋势和位置.
3.2 测向性能分析
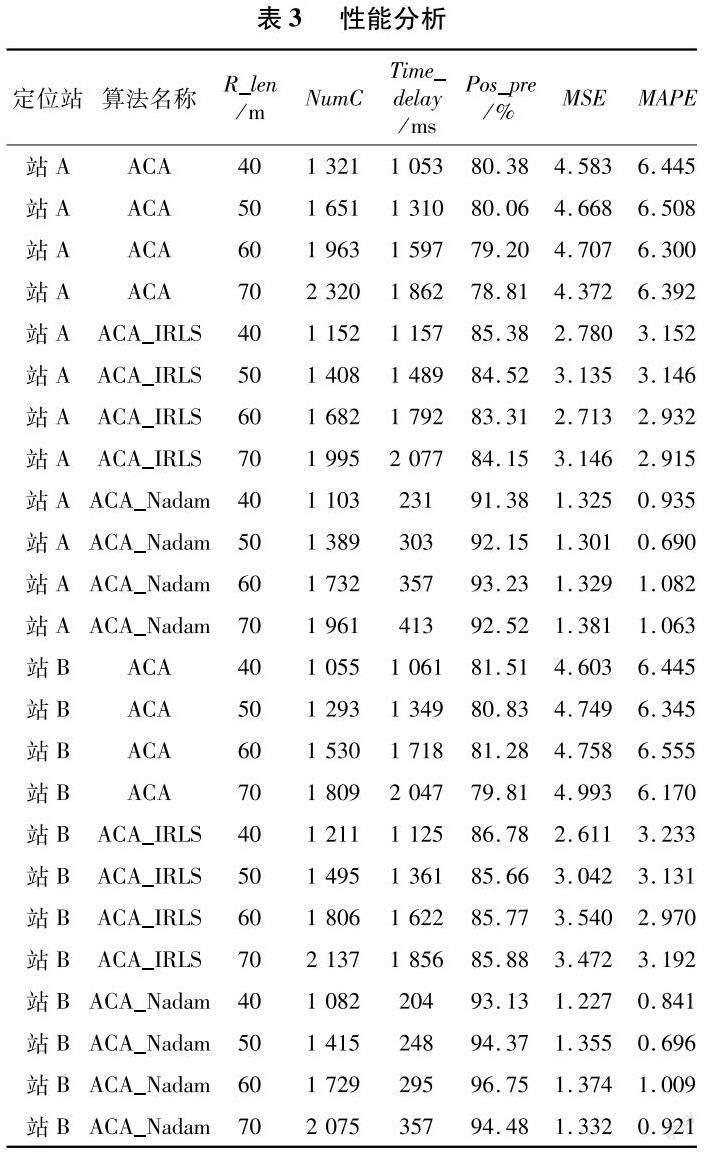
由于采用Nadam优化算法的神经网络对于ACA体制下的信号幅度数据具有较好的性能和预测效果,因此本研究也使用ACA_Nadam对测向目标的探测数据进行位置信息估计,分别在定位站A和B进行航行半径为40 m、50 m、60 m和70 m的顺时针和逆时针实验.为了验证该优化估计方式的准确程度,本研究将计算估计的均方误差(mean square error,MSE)和平均绝对百分比误差(mean absolute percentage error,MAPE),如表3所示.其中,R_len表示测向目标的航行半径,NumC表示采样点数,Time_delay表示时延,Pos_pre表示测向估计的预测准确率,MSE表示均方误差,MAPE表示平均绝对百分比误差.
经过分析以上结果且验证误差比对后,可以发现ACA、ACA_IRLS与ACA_Nadam三者的区别:
1)ACA的解算准确率及时延都比较差,相对后两者来说,预测准确率大约在78%~82%,预测时间也较长(在1.01 dot/ms左右),即需要接近1 ms才能解算出1次被测目标位置信息.
2)ACA_IRLS相对ACA有明显改善,预测准确率大约在83%~86%,而相对ACA提升5%左右,但是对于较少的采样点数,预测时间却延长100 ms左右,预测时间在0.98 dot/ms左右,即输出1次新的經过解算的位置需要略大于1 ms的时间.
3)ACA_Nadam相对ACA与ACA_IRLS而言,预测准确率和时效性都有显著提升.预测准确率大约在92%~96%,相对ACA_IRLS提升8%左右.预测时间在5.30 dot/ms左右,即输出1次新的被测目标位置只需平均不到0.2 ms的时间,并且可以保证较好的准确度.由于本系统设计中,输出1次被测目标的位置信息需要120次测量,通过ACA_Nadam算法只需不到0.2 ms时间即可解算出被测目标位置信息,等效于每60次测量只需不到0.1 ms的运行时间.
4 结 论
本研究依托Zero-IF构架的多通道SDR接收机,实现了低成本可重构无人机测向硬件平台,在该平台上使用ACA体制对“低、慢、小”无人机进行了测向,针对ACA体制测向精度较低的缺点创新性地引入深度神经网络来提升测向精度.由最终的实验结果可知,深度神经网络可以将ACA测向体制的数据准确率提升10%以上.
参考文献:
[1]宋晨晖.民用无人机应用进展[J].机电工程技术,2018,47(11):149-152.
[2]屈旭涛,庄东晔,谢海斌.“低慢小”无人机探测方法[J].指挥控制与仿真,2020,42(2):128-135.
[3]房嘉奇.多基站时差频差无源定位处理方法研究[D].西安:西安电子科技大学,2016.
[4]张丽宏.对微型无人机信号的无源探测与定位技术研究[D].长沙:国防科技大学,2017.
[5]秦顾正.对无人机的无源定位关键技术研究[D].南京:东南大学,2019.
[6]马鲁潼.低慢小目标频扫探测雷达系统设计[D].西安:西安电子科技大学,2020.
[7]Huang L,Li J,Hao H,et al.Micro-seismic event detection and location in underground mines by using convolutional neural networks (CNN) and deep learning[J].Tunn Undergr Space Technol,2018,81:265-276.
[8]谢宏,杨环.一种随机森林与深度学习结合的室内定位方法[J].上海海事大学学报,2020,41(3):117-121.
[9]Lima C A M,Junqueira C,Suyama R,et al.Least-squares support vector machines for DOA estimation:a step-by-step description and sensitivity analysis[C]//2005 IEEE International Joint Conference on Neural Networks.Montreal,QC,Canada:IEEE,2015.
[10]Cho J S,Hwang D Y,Kim K H.Improving TDOA based positioning accuracy using machine learning in a LORAWAN environment[C]//2019 International Conference on Information Networking (ICOIN).Kuala Lumpur,Malyasia:IEEE,2019.
[11]Sashida A,Moussa D P,Nakamura M,et al.A machine learning approach to indoor positioning for mobile targets using BLE signals[C]//2019 34th International Technical Conference on Circuits/Systems,Computers and Communications (ITC-CSCC).JeJu,South Korea:IEEE,2019.
[12]周志华.机器学习[M].北京:清华大学出版社,2016.
[13]Herath S,Pathirana P.Optimal sensor arrangements in angle of arrival (AOA) and range based localization with linear sensor arrays[J].Sensors,2013,13(9):12277-12294.
(实习编辑:黄爱明)
Abstract:In this paper,a low-cost software defined radio(SDR) system for amplitude comparison approach(ACA) method is demonstrated.To address the shortcoming of low accuracy of ACA,a neural network to improve the accuracy of the angle measurement is proposed.The amount of accuracy improvement by introducing neural network is mainly studied.Experimental results show that neural network has higher direction-finding accuracy than that by directly applying ACA method on received signals.The direction-finding accuracy of the best optimization algorithm increases approximately by 10%.The results of this paper show that combining the SDR system with the neural network can provide a low-cost and highly accurate solution to angle measurement problems.
Key words:amplitude comparison approach (ACA);neural network;low-cost solution
基金項目:四川省科技计划重点研发项目(2021YFS0311、2021YFG0361)
作者简介:夏 鸿(1984—),男,硕士,副总设计师,从事电子系统设计研究.E-mail:XHTougaoyong@outlook.com
通信作者:罗正华(1965—),男,硕士,副研究员,从事通信与电子系统研究.E-mail:694352170@qq.com
猜你喜欢
现代电力(2022年2期)2022-05-23
装备制造技术(2020年11期)2021-01-26
电子制作(2019年19期)2019-11-23
电子制作(2019年12期)2019-07-16
中国生物医学工程学报(2019年5期)2019-07-16
通信电源技术(2018年3期)2018-06-26
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
海军航空大学学报(2015年4期)2015-02-27
电测与仪表(2014年20期)2014-04-04