自动泊车关键技术研究进展综述
2023-10-12 04:28:24张成涛覃立仁杨航赵浙栋谭泽旦
汽车工程学报 2023年5期
张成涛, 覃立仁, 杨航, 赵浙栋, 谭泽旦
(广西科技大学 机械与汽车工程学院,广西,柳州 545616)
2020年,国家发展和改革委员会、工业和信息化部在正式颁发的《智能汽车创新发展战略》[1]中提出,到2025 年,中国智能汽车的技术创新、产业生态、基础设施、法规标准、产品监管和网络安全体系基本形成。同时,实现有条件自动驾驶的智能汽车达到规模化生产,实现高度自动驾驶的智能汽车在特定环境下的市场化应用。《智能网联汽车技术路线图2.0》[2]提出,到2035 年,中国方案智能网联汽车技术和产业体系全面建成,产业生态健全完善,整车智能化水平显著提升,而自动泊车技术作为智能汽车的重要组成部分,主要由车位探测、路径规划和跟踪控制3 部分组成,泊车时不需要驾驶员的干预,依靠车上安装的各种传感器获取泊车环境信息,自动探测确认车位,然后根据车辆自身状态和周边环境信息等规划一条安全无碰撞的泊车路径,再根据规划的路径进行跟踪控制,以便安全地将车辆泊入车位。在此期间不需要驾驶员观察环境、操控方向盘和控制速度,使驾乘的安全性和舒适性显著提高,以及发生交通事故时车辆受损和人员伤亡的次数大幅降低。正是由于自动泊车可以把驾驶员从枯燥繁琐的泊车操作中解放出来,提升了驾驶安全性与舒适性,驾驶员对自动泊车的需求愈加强烈,所以自动泊车越来越受到国内外学者的关注。
本文基于大量国内外研究机构和学者发表的研究报告与文献资料,重点围绕车位探测、路径规划、跟踪控制等自动泊车关键技术的研究进展情况进行梳理,总结分析现有研究的不足,并提出研究展望,旨在为将来开展车辆端自动驾驶技术的研发提供参考。
1 自动泊车系统的应用现状
自动泊车系统(Autonomous Parking System,APS)最早可追溯到1992 年,大众在概念车IRVW Futura 上搭载了APS,该概念车可实现全自动泊车功能,驾驶员可以下车观察泊车情况。该APS需要在车辆行李箱中安装个人电脑大小的计算机来控制,这套设备成本较高,会使车辆售价提高3 000美元左右,所以没有量产这套系统。
直到2003 年,丰田在日本版普锐斯的混合动力汽车上提供选装APS功能,APS才开始实现商用化。3 年后,英国版普锐斯车主可花700 美元左右加装APS。
随着自动泊车技术的发展,近几年来,在乘用车上搭载APS的企业与日俱增,并逐渐由高档轿车向中档轿车延伸,十几万的紧凑轿车也开始搭载APS。
2020 年,APS 在乘用车市场的装配率已达12.3%[3],未来APS 的装配率将会迅速增长,其市场规模增长空间巨大。目前,装配了APS的代表厂商与车型见表1。
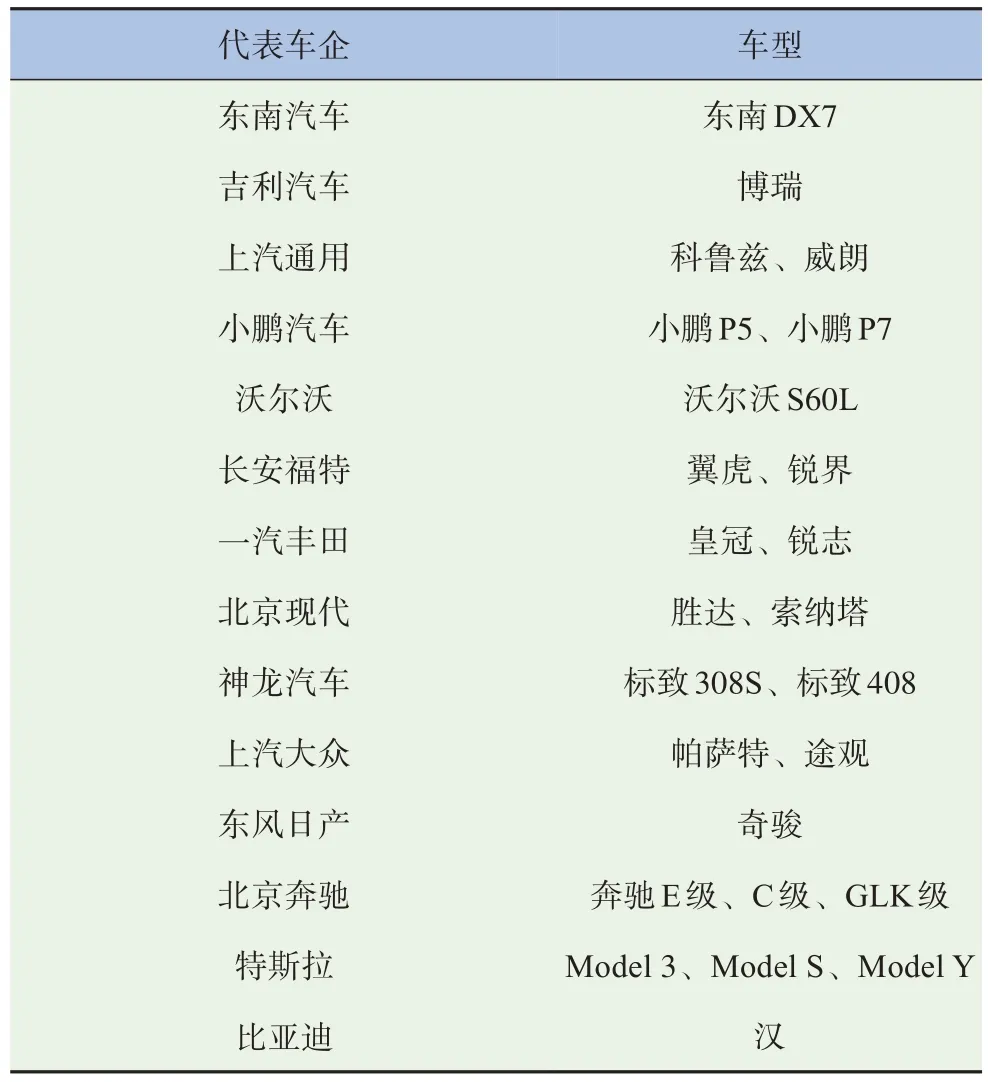
表1 装配了APS的代表厂商与车型
2 自动泊车系统的研究现状
APS 的重要组成部分为车位探测、路径规划和跟踪控制。车位探测准确性是路径规划合理性的基础,路径规划合理性是跟踪控制准确性的基础,而跟踪控制准确性是安全泊车的基础,国内外学者对这几个方面做了许多研究。
2.1 自动泊车车位探测
车位探测是环境感知的一部分,主要利用安装在车身周围的传感器收集周边环境,进而分析识别车位。车位探测的方法主要有基于摄像头的车位探测方法、基于雷达的车位探测方法和基于多传感器融合的车位探测方法。
2.1.1 基于摄像头的车位探测方法
基于摄像头的车位探测方法主要依靠摄像头获取车辆周围环境的图像,通过识别图像中的车位线或车位角来确认车位。
随着数字图像处理设备性价比的提高和图像处理技术的快速发展,视觉传感器在车位识别中越来越受到研究者的重视,许多学者对基于摄像头的车位探测方法进行了研究。YAMAMOTO 等[4]为了控制成本仅使用单目相机获得的图像来识别用于停车控制的周围环境,但从单目相机获得的图像仅能粗略地预测到物体的距离。JUNG 等[5]提出了一种基于单目视觉的停车位标记识别算法,通过改进的点与线段之间的距离来区分识别线段,该算法在停车位标线被严重遮挡的情况下仍可以成功识别停车位,但距离仅能粗略估计。基于单目摄像头的检测方法虽然成本低,但只能用于检测划线停车位,且能获取的图像范围小,距离检测精度低。
针对单目摄像头获取的图像范围太小问题,WU Yan 等[6]从4 个鱼眼相机捕获的4 个校准图像组成环绕视图图像,并用一种VH-HFCN 分割模型对图像提取停车位信息,该模型被证明能有效地从停车位和车道标记中提取线性特征信息。刘泽[7]用4 个鱼眼相机采集车辆四周的环境图像信息,再进行图像拼接得到360°全景图像,对搭建好的深度学习模型进行训练后完成车位检测,所以即使在复杂的环境中也能准确的识别车位,平均正确率为89.3%。江绍康[8]通过鱼眼相机搭建车载环视系统以获取车辆周围环境的图像信息,为深度学习模型提供训练图像样本,然后识别车位角,再结合直线段检测(Line Segment Detector,LSD)算法检测得到完整停车位,试验结果表明精确率为93.9%,召回率为92.5%。WU Zizhang 等[9]提出了一种高效且通用的停车位检测方法PSDet,对环视图像能识别梯形、砖块和草地等各种场景中的停车位,但光照条件差、模糊和停车线的严重遮挡会导致检测不准确。PARK 等[10]提出了一种使用深度神经网络的停车位检测与跟踪(Parking-Slot Detection Trail,PSDT)算法,实时跟踪停车位,有效解决了因相机盲点导致车位被遮挡而检测失败的问题。环视图像所获取的图像范围比单目摄像头获取的图像范围更大,得到的停车位线的信息更完整,能有效提高停车位的检出率和正确率,但该方法也只能用于检测划线停车位。
针对只能检测划线停车位的问题,曾袆等[11]利用双目视觉技术进行环境三维重建,不仅能识别划线停车位,还能识别由两边车辆形成的空车位,但实时性较差且容易受到光线的影响。韩雨松[12]基于双目视觉搭建停车位检测模型,对相机进行了立体校正,能有效检测到停车位,但仍受光线、噪声等的影响较大。采用双目摄像机的停车位检测方法可以还原周围环境的三维信息,能识别划线停车位和由两边车辆形成的空车位,但其计算量大,对于处理器的硬件要求高,实时性较差。为解决算法复杂、实时性差的问题,YU Zhuoping 等[13]使用卷积神经网络检测器,达到了简化算法、减小模型的目的,不仅提升了检测速度还保持了准确性。
基于摄像头的车位探测方法,虽然目前检测的正确率不低,但摄像头在获取车辆周围的环境信息时,容易受到光照条件和障碍物形成视野盲区的影响,所获取的图像质量会影响检测正确率。
2.1.2 基于雷达的车位探测方法
目前,APS 中用于车位探测的雷达传感器多为超声波雷达,虽然性价比较高,但对车位的识别率较低,而激光雷达作为车位探测传感器的方案多在概念阶段,而且激光雷达的价格较高。利用超声波雷达或激光雷达进行车位探测的方案如图1 所示,基于超声波雷达的车位探测方法是利用超声波测距的特性来分析车位情况,当A 车经过B 车、空车位和C 车时,超声波雷达测到的距离会发生变化,根据这些变化可以分析判断出车位尺寸。基于激光雷达的车位探测方法是通过分析处理点云数据来确定障碍物,并根据障碍物分布情况来确定车位信息。
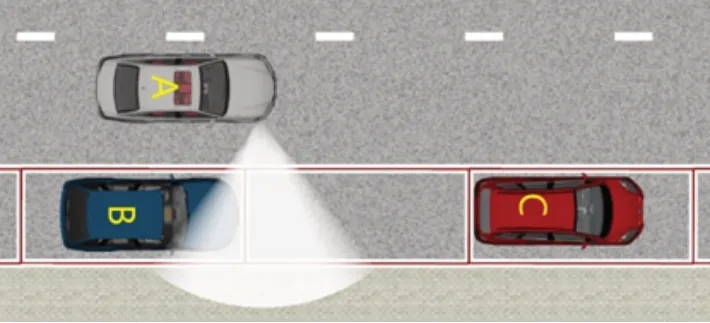
图1 雷达车位探测方案
JEONG 等[14]提出了一种基于超声波传感器的低成本停车辅助系统,通过改进超声波传感器的转角误差来实现车位检测。试验表明,该辅助系统成功地进行了停车位检测和停车控制,但在复杂环境下还是有一定的错误。陈建明等[15]利用长距超声波雷达发射电磁波形来感知周围的障碍物及识别车位,验证了其在泊车系统上使用的可行性,但会因环境影响而导致超声波能量损失,从而产生一定的误差。钟林伟[16]将超声波雷达安装在Freescale 智能车上,从而实现车位探测功能;还针对温度对超声波测距的影响,设计了基于温度变化的补偿程序,减小了由温度变化导致的测量误差,并通过试验证明利用超声波雷达进行车位探测的可行性。
为了解决超声波雷达易受环境因素影响的问题,提出了用原理相似的激光雷达传感器探测车位。LEE 等[17]提出了一种基于激光雷达的车位探测方法,首先处理激光雷达的三维点云数据,然后进行聚类提取障碍物将障碍物数据投影到二维面上,最后根据车辆动力学理论计算得出最小停车位尺寸并与识别的车位进行比较,结果表明能有效探测车位。BOCK 等[18]在车辆上安装两个激光雷达,从记录的3D 点云中提取停车信息,并用分类器来识别车辆的特征形状,在大多数情况下,能可靠地检测到停放的车辆,提取到车辆尺寸和停车间隙等信息,以此分析车位信息。IMAMEEV 等[19]提出了一种基于激光雷达的停车点搜索算法,即仅使用激光雷达传感数据,通过对这些数据进行预处理和聚类来识别停车场中的不同车辆,从而分析确认车位,最后在虚拟环境中成功验证该方法的适用性,但还未在真实环境中进行验证。王宇辰等[20]提出一种基于激光雷达的泊车库位动态检测方法,依靠激光雷达精度高和稳定性好的特点,加上最佳外接矩形拟合算法对激光雷达的数据进行处理分析,实车试验中库位检测获得了良好的结果,能满足自动泊车的要求。薛峰[21]提出了一种基于激光雷达的改进型自适应阈值聚类方法来探测车位,根据激光雷达的扫描原理和车辆轮廓特征,将激光雷达传感器的扫描数据进行自适应阈值聚类,结果能准确识别多种车位。
虽然超声波雷达作为车位探测传感器的成本低廉且能有效识别车位,但超声波雷达容易受到环境因素的影响,精度不高,仍然存在一定的误差,而且超声波雷达仅能检测由两边车辆形成的空车位,不能检测地面画好的车位线。激光雷达的检测精度远远高于超声波雷达,但成本较高,目前还不能大规模使用,而且激光雷达也仅能检测由两边车辆形成的空车位,不能检测地面画好的车位线。
2.1.3 基于多传感器融合的车位探测方法
多传感器融合技术是将摄像头、超声波雷达、激光雷达和毫米波雷达等传感器综合利用,根据不同传感器的性能特征,将不同传感器获取的信息进行互补和优化,达到更好的检测效果。多传感器融合技术的基本原理类似于人类大脑处理环境信息的过程,人类通过眼睛、鼻子、耳朵和皮肤等多种感官将获取的周围环境信息传送给大脑,然后大脑对这些信息进行分析处理来准确评估周围环境。基于多传感器融合的车位探测方法是通过各种传感器获取周围环境信息,然后对这些信息进行分析处理来确认车位信息。
为避免单一传感器探测车位时受到环境因素和自身性质的影响,很多学者提出并研究了多传感器融合的车位探测方法。SUHR 等[22]提出了一种基于量产融合传感器的APS障碍物精确定位方法,先用超声波雷达确认障碍物初始位置,然后用环视监控摄像头检测障碍物的垂直轮廓,通过组合计算来确定障碍物的位置,从而识别车位。IM 等[23]提出一种基于环视监控器和激光雷达融合的停车位检测方法,利用传感器融合数据来提取停车线以检测停车位,通过试验验证该方法的停车位检测性能好、速度快。PIAO Changhao 等[24]提出了多传感器信息融合的停车位识别方法,通过多传感器信息集成算法和应用线性映射来识别、匹配停车位,对非平行状态的车辆也具有鲁棒性,仿真和实车试验结果表明可以提高APS性能,停车位识别的成功率达到94%,其识别误差为±5 cm。YANG Yifan 等[25]提出了一种抗干扰能力强、检测精度理想的多传感器车位探测方法,基于深度学习在全景图像上确定停车位的大致位置,然后利用二次多项式拟合来检测停车线,在车辆侧面采用远距离窄波束超声波雷达来判断停车位内是否有障碍物,并与鱼眼摄像头共同检测障碍物的位置,实车测试结果表明,该方法可以有效抵抗环境信息干扰,达到预期的识别精度。江浩斌等[26]提出一种基于超声波雷达和视觉信息传感器融合的智能检测停车位的方法,根据超声波雷达和视觉传感器信息来识别车辆位姿和停车位参数,通过仿真和实车试验验证该方法的有效性,车位探测正确率平均值为92.8%。杨一帆[27]提出了利用鱼眼摄像头和超声波雷达进行融合的车位探测方法,车辆运动时利用超声波雷达探测障碍物的位置,并与设定的参数进行对比,判断探测到的空位是否满足泊车,同时通过鱼眼摄像头获取的图像检测停车线,增强了自动泊车环境感知的抗干扰能力,从而提升了车位探测能力。
基于多传感器融合技术的车位探测方法可利用不同传感器的特征进行信息互补优化,解决了单一传感器只能检测停车位的车位线或只能检测由两边车辆形成的空车位的问题。该方法不仅能检测车位线还能准确检测障碍物的位置距离,可实现多工况下准确检测车位的目标,为自动泊车提供更准确的车位信息,是未来停车位检测的发展趋势。
2.2 自动泊车路径规划
自动泊车路径规划是基于车载传感器获取车辆周围环境信息,然后规划出一条满足车辆运动学且安全无碰撞的泊车路径。
基于数值优化方法来规划泊车路径,是将路径规划当作一个凸显问题,通过数值优化方式来解决问题,从而得到最优路径。叶林铨等[28]提出了基于伪谱法的泊车路径规划方法,利用细化网格方法保证路径的可行性。LI Bai 等[29]针对停车位周围不规则障碍物或随意停放的车辆,采用内点法来解决其动态优化问题。钱立军等[30]采用分段高斯伪谱法的自主泊车路径规划方法,又采用内点法对非线性问题进行优化求解,从而得到最优泊车路径。
由于数值优化方法在求解时的计算量过大,导致计算效率低下,所以在泊车规划中应用较少。
传统的平行泊车路径规划方法分为两段圆弧法和圆弧与直线结合法,两段圆弧泊车路径规划方法如图2 所示,圆弧与直线结合的泊车路径规划方法如图3所示。
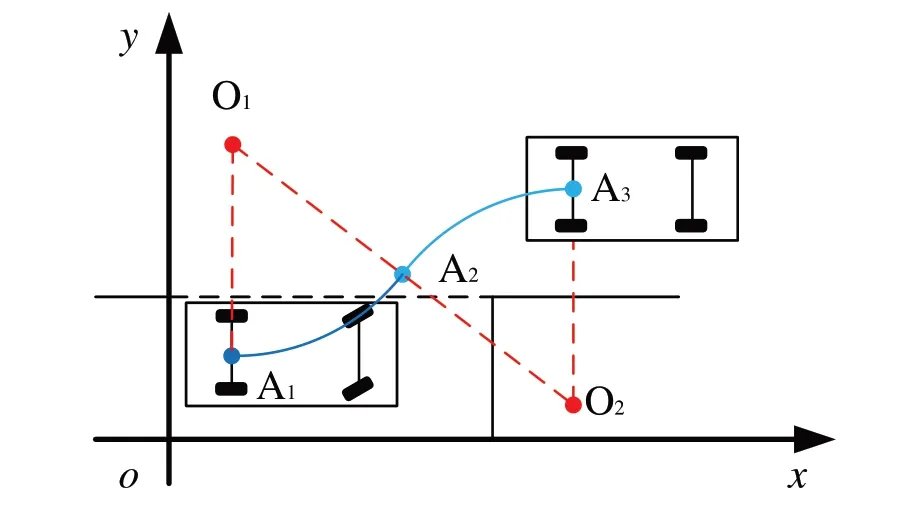
图2 两段圆弧泊车路径规划

图3 圆弧与直线结合的泊车路径规划
有学者对此进行了研究,HSU 等[31]以两段圆弧曲线为基础规划平行泊车路径,但没有分析转向角变化的影响,所规划的泊车路径出现了曲率突变点。KIM 等[32]利用两段圆弧法和一段直线法进行泊车路径规划,虽然规划的方法都比较简单,但是路径的曲率存在不连续的情况。因此,使用简单的圆弧法或圆弧与曲线法进行泊车路径规划都会出现曲率不连续的情况,不能满足泊车控制要求。
为了解决上述曲率不连续问题,有学者利用曲线拟合法对曲率突变点进行拟合。VOROBIEVA等[33-34]针对狭小空间的平行泊车场景,用圆弧法进行泊车轨迹规划,但规划的轨迹存在曲率不连续的情况,最后使用回旋曲线法进行拟合,解决了曲率不连续的问题,但回旋曲线法的计算难度大,不易应用在实时处理器上。张弛[35]运用圆弧和直线组合法对标准平行泊车位和特殊平行泊车位进行泊车轨迹规划,所得到的泊车路径存在曲率不连续点,分别经过使用B 样条理论和CC 曲线理论对泊车路径曲率不连续点进行优化后得到曲率连续的泊车路径。
此外,也有学者直接用B 样条曲线法、五次多项式曲线法等进行泊车路径规划。李红等[36]、吴中伟[37]、姜立标等[38]基于B 样条曲线法进行泊车路径规划,通过分析碰撞和转向性能建立约束方程,求解得到曲率连续的泊车轨迹,但是求解过程比较复杂。DEMIRLI 等[39]基于五次多项式曲线法进行泊车路径规划,得到了曲率连续的泊车路径,但是局部曲率过大导致泊车需要的空间比较大。ZHANG Shuwen 等[40]针对最小水平距离平行泊车问题,利用五次多项式曲线法进行泊车路径规划,得到曲率连续的泊车路径。黄江等[41]基于倒推法确认避障条件得到泊车起始点的范围,然后根据避障和转向性能建立约束方程并求解出五次多项式的系数,最后得到符合避障约束条件和曲率连续的泊车轨迹。
综合分析得到各曲线泊车路径规划的优缺点,见表2。

表2 各曲线泊车路径规划的优缺点
用数值优化方法求解时的计算量过大,计算效率低下,在泊车规划中应用较少,用圆弧法或圆弧与直线结合法进行泊车路径规划会出现曲率突变点,不利于泊车运动的控制,可以利用回旋曲线法、B 样条曲线法和CC 曲线法等对曲率突变点进行优化拟合得到曲率连续的泊车路径,但会增加一定的计算量。利用B 样条曲线法、五次多项式曲线法来规划泊车路径,可以直接得到曲率连续的泊车轨迹,但是要在避障条件与转向性能要求条件下进行求解,求解的过程比较复杂,不易在实时控制器上实现。由于泊车工况一般位置相对比较固定,所以基于几何曲线规划泊车路径在一般场景下都能得到比较合理的结果,但是在非标准停车位的场景下可能会导致计算量太大而无法成功规划。
2.3 自动泊车跟踪控制
跟踪控制是自动泊车系统的关键技术之一,是自动泊车性能的关键因素。目前,自动泊车跟踪控制方法主要有两种:一种是基于人工智能的跟踪控制方法;另一种是基于泊车路径的跟踪控制方法。根据车辆运动学和避障要求设计好泊车路径后,采用合适的控制算法来控制车辆的转角和车速,实现车辆轨迹跟踪控制。
2.3.1 基于人工智能的跟踪控制
基于人工智能的跟踪控制方法需要收集大量优质驾驶员的泊车数据,采用合适的控制算法对控制器进行训练后得到泊车控制器,泊车控制器可根据车辆自身状态信息和障碍物信息来选择控制决策,以便安全地完成泊车操作。基于人工智能的自动泊车跟踪控制常用的算法有:模糊控制[42-44]、神经网络[45-46]和遗传算法[47-48]等。
温宗周等[49]提出了基于模糊控制的自动泊车方法,为实现自动泊车的最优控制,设计并利用Matlab 软件建立模糊控制器模型,并用学习算法对控制器参数进行优化,仿真结果表明该方法不仅能较好地实现自动泊车跟踪控制,还大幅缩短了泊车时间。CHAI Runqi 等[45]基于深度神经网络的控制方案来实现自动泊车,使用最优泊车轨迹数据集聚合对控制器进行训练,把经过训练的深度神经网络控制器作为运动控制器实时反馈动作,试验结果表明,该方法实现了泊车操作的有效性。PHILIP等[50]采用模糊控制算法和神经网络算法实现自动泊车跟踪控制,比较了两种算法的预运算、决策速度、输入数据和输出数据的相关系数,模糊控制需要建立模糊规则库,而神经网络需要大量的数据训练才能使两种控制算法完成自动泊车,神经网络算法的决策速度比模糊控制算法快,相关系数更大,同时,神经网络算法的泛化能力较好,对车辆初始位姿的要求较低。SU Bo 等[51]提出了一种基于遗传算法的端点区域化二次平行自动停车跟踪控制方法,仿真结果表明,该方法可以使车辆安全完成泊车,有效提高停车效率。
目前,基于人工智能的自动泊车跟踪控制研究已经取得一些成果,但是该方法需要收集大量优质驾驶员的泊车数据作为控制系统的设计借鉴或控制器的训练样本,而不同驾驶员的驾驶风格有一定差异,导致收集的泊车数据也会有很大差异,这会大大增加控制器设计与建模的难度,使不同车型的控制器模型训练结果产生很大偏差,难以实现广泛应用。
2.3.2 基于泊车路径的跟踪控制
基于泊车路径的跟踪控制方法是根据车辆周围的环境信息和车辆自身的位姿信息等进行泊车路径规划,然后选择合适的跟踪控制算法来控制车辆的油门、方向盘转角和挡位等,使车辆能按照规划好的泊车路径行驶,安全地完成泊车操作。目前,常用的路径跟踪控制算法有:纯跟踪控制、PID 控制和模型预测控制等。
纯跟踪控制是一种传统的横向控制算法,有很多学者对其进行了研究。王亮等[52]利用CarSim 和Simulink 分别搭建车辆模型和纯跟踪算法模型,对参考轨迹进行了跟踪控制仿真并对跟踪误差进行了分析,最后进行了实车试验,试验结果与仿真结果基本一致,在低速工况下能有效地进行路径跟踪。AHN 等[53]对纯追踪控制进行改进,综合考虑车辆与路径的关系,并启发式地选择新的前视点,车辆可以稳定地跟踪路径,而不会遇到切角问题,能更准确地跟踪所需路径。纯跟踪控制的效果很大程度上取决于预瞄距离,对于复杂路径的跟踪效果较差。
PID 控制是发展比较早的一种控制算法,应用非常广泛,很多学者对其进行了研究。MASHADI等[54]提出了一种基于优化增益的PID 控制器的直接转矩控制系统,将驾驶员预瞄距离、航向误差,以及车辆与期望路径之间的横向偏差作为输入,PID 控制器以此确定转向角和横摆力矩,使车辆沿着所需的路径行驶,仿真结果表明,该控制器在车辆路径跟随和稳定性方面的有效性显著。张佳奇等[55]以前轮转角作为控制系统的输入,设计基于横向偏差和航向偏差的模糊自适应PID 路径跟踪控制器,仿真结果表明,动态性能得到改善且具有较好的自适应能力。PID 算法针对不同的模型需要不同的PID 参数才能达到稳定控制,参数需要通过大量的试验获取,工作量显著增大,且纯PID 的鲁棒性并不好,抗干扰能力也不强。
为了提高控制精度和稳定性,有学者采用了MPC控制算法进行跟踪控制,并与其他算法进行比较。SONG Jie 等[56]提出了一种基于模型预测控制算法的轨迹跟踪方案,并构建了基于MPC 算法的轨迹跟踪器,通过仿真验证了所设计的MPC 控制器具有良好的鲁棒性,可以最大限度地减小跟随误差。YE Hao 等[57]提出一种具有柔化约束路径追踪控制策略的线性模型预测控制方法,设计的目标函数充分考虑了预测变量与参考变量之间的偏差,并加入了松弛因子进行优化,最后进行路径跟踪控制的仿真试验与实车试验,并与PID 控制算法的跟踪效果进行对比分析,结果表明,带软化约束的MPC控制器的路径跟踪效果明显优于PID 控制的路径跟踪方法。ZHANG Bingzhan 等[58]设计了一种基于增量模型预测控制的路径跟踪控制器,并与纯跟踪控制的路径跟踪控制算法进行比较,仿真结果表明,所设计的路径跟踪控制器可以更好地控制车辆跟踪期望路径。
综合分析可知这3种控制算法的优缺点,见表3。

表3 控制算法的优缺点
纯跟踪控制在低速情况下合理调整参数可以实现较好的路径跟踪效果,预瞄距离和速度的大小影响跟踪效果。PID 控制只需要试凑出控制参数,但固定PID 控制参数对车速适应性很差,单一的PID控制很难适应无人驾驶的复杂工况。相较于其他的控制算法,MPC控制考虑了控制量求解过程中的约束限制,对车辆控制非常关键,能使车辆较好地跟踪路径,近年来越来越受到重视,但仍有很大的优化空间,优化改进后的MPC 控制算法将成为未来发展的方向。
3 总结与展望
从自动泊车系统出现至今,逐渐发展成熟并已开始量产,今后会迅速应用在各款车型上,普及空间巨大。
对于自动泊车系统的车位探测技术,单一的传感器在自动泊车系统中的局限性很大,难以满足环境复杂的泊车场景,而多传感器融合技术集合了各传感器的优点进行互补优化,能有效提高车位探测的准确率。不过,多传感器融合技术需对多个传感器采集的数据信息进行处理融合,数据多样导致处理过程复杂且增加了错误的可能性,但多传感器融合技术仍是未来的重点发展方向。
对于自动泊车系统的路径规划方法,数值优化方法求解时的计算量过大,计算效率低下,在泊车规划中应用较少。由于泊车起点与终点位置相对比较固定,利用几何曲线进行泊车路径规划相对比较简单,但仅对于标准车位的规划结果比较理想,对非标准(狭窄、多障碍物)车位规划的结果还不太理想,随着车位探测与障碍物识别能力的提升,未来还需要对非标准车位的泊车路径规划加深研究。
对于自动泊车系统的跟踪控制技术,基于人工智能的跟踪控制方法虽然已经取得了一定的成果,但要收集大量驾驶员的泊车数据作为控制器训练的数据样本,由于驾驶员习性不同,数据会有差距,不容易训练模型,而且对不同车型的训练结果也不同,加大了普及的难度,今后仍需加深研究。而基于泊车路径的跟踪控制方法,模型预测控制的跟踪控制效果优于其他控制方法,但仍有优化的空间,可以从系统的瞬态性能和抗干扰性能的角度,实现约束松弛参数和加权系数优化,充分发挥系统潜能,使模型预测控制的跟踪效果达到更优水平。
猜你喜欢
汽车实用技术(2023年10期)2023-06-14 07:13:06
汽车实用技术(2022年19期)2022-10-19 07:46:46
汽车实用技术(2022年7期)2022-04-20 11:57:58
汽车画刊(2020年5期)2020-10-20 05:37:35
英语文摘(2020年7期)2020-09-21 03:40:56
祝您健康·文摘版(2020年3期)2020-04-09 04:47:27
军民两用技术与产品(2020年3期)2020-04-07 03:00:26
数学小灵通(1-2年级)(2019年5期)2019-05-21 10:02:14
自然资源情报(2018年7期)2018-12-28 00:52:52
遵义(2018年13期)2018-08-08 03:46:00