
甲虫后翅及其FWMAV可折叠翼仿生研究
2023-10-12 00:41孙霁宇闫永为
无人系统技术 2023年3期
孙霁宇,闫永为
(吉林大学工程仿生教育部重点实验室,长春 130022)
1 引 言
微型飞行器(Micro Air Vehicle,MAV)的概念是由美国国防预先研究计划局(DARPA)在1992 年的未来军事研讨会上首次提出的。其质量小、体积小、机动灵活,具有实时成像和导航通信的功能以及便于携带、伪装性好、机动灵活的优势,可用于军事侦察监视、对敌摧毁打击、目标搜索探测、边境巡航和监控等领域,具有十分广阔的应用前景[1]。随着先进制造技术、空气动力学理论和昆虫飞行机理等理论和技术的发展,对其结构轻量化、尺寸微型化和动力高效化的发展提出了更高的要求。按照飞行特点不同,MAV可以分为固定翼、旋翼和扑翼三类,但在尺寸微型化、体积轻量化和飞行智能化的发展趋势下,扑翼微型飞行器(Flapping Wings MAV,FWMAV)愈发受到广泛关注[2]。
与固定翼和旋翼MAV 相比,FWMAV 可将升降运动、悬停运动以及前飞运动集成于一个扑翼运动操控系统,从而仅靠翅翼扑动完成各种飞行动作,即双翼性能直接决定了FWMAV 的飞行特性。目前FWMAV 还存在着非定常运动机理、翼弦向和展向的弯扭变形、开裂式翼尖以及锯齿状后缘等问题尚未解决[3-4]。不同于固定翼和旋翼MAV 的刚性机翼,大多数FWMAV 的机翼是柔性的,其机翼既能柔性变形以适应双翼扑动产生的低雷诺数下“非定常运动”的气流变化[5],又能保持一定的刚度以适应流场变化并产生高升力[6],还能在复杂流场的集成运动下保持较好的飞行稳定性,降低机翼扑动产生的振动冲击[7],这就要求FWMAV 的双翼既具有优异的扑动力学性能,又具有良好的抗振性能。
为了减小FWMAV 的尺寸以提升其便携性,可基于甲虫可折叠后翅设计仿生可折叠翼。进行飞行运动时,甲虫的可折叠后翅在适应复杂的流场变化作用的同时,既能产生较高的升力,又能保持良好的飞行稳定性;结束飞行运动时,甲虫后翅又能灵活地折叠收入鞘翅之下,便于其在狭小的空间中进行迁移。目前,针对甲虫的仿生学研究主要集中在甲虫鞘翅及后翅的力学特性、结构对其飞行特性的影响、飞行方式及其空气动力学特性、可折叠后翅的飞行机制及其在可折叠FWMAV 上的仿生设计等方面[8]。针对FWMAV 机翼在低雷诺数下复杂流场中的扑动力学性能,本论文以甲虫可折叠后翅为入手点,综述其后翅结构、力学性能以及可折叠柔性翼的研究现状,为FWMAV的研制提供仿生学参考,并探寻仿生可折叠翼的发展方向。
2 甲虫后翅结构及材料力学性能
甲虫是鞘翅目昆虫的统称,属于有翅亚纲、完全变态发育类,身体外部是坚硬的角质层外壳,共有两对翅、六对足。其前翅(又称鞘翅)呈拱形、硬而厚,能够很好地保护膜质后翅,并在飞行时提供额外升力。其后翅可折叠、薄而富有弹性,由翅脉和翅膜组成。
2.1 甲虫后翅形貌特征
迁飞性甲虫由于生活环境、飞行能力以及体型大小的不同,其后翅的形貌特征(如后翅尺寸大小、折叠比、翅脉生长分布等[9])亦具有显著差异。如图1 所示,亚洲瓢虫及十星瓢虫的后翅翅脉分布特点相近,前缘脉经过折叠点后发生了退化,后翅臀缘不再有翅脉生长,整个可折叠的后翅臀区仅有一根臀脉支撑。不同于亚洲瓢虫和十星瓢虫的后翅,铜绿丽金龟和双叉犀金龟后翅中的翅脉数量变少,但是翅脉更加粗壮,后翅可折叠的臀区生长有更多的臀脉,前缘脉经过折叠点后仍然继续生长延伸。星天牛和桑天牛后翅中的翅脉数量介于瓢虫和金龟之间,其前缘脉越过折叠点后亦不再继续生长,但在可折叠的臀区生长有两根分支翅脉。甲虫的翅脉分为纵向翅脉和横向翅脉两种,其中纵向翅脉多为粗壮的凸脉和凹脉的间隔分布,横向翅脉多为纵向翅脉分生而成[8]。
甲虫后翅的折叠/展开机制各不相同,不同种类甲虫后翅具有不同的折叠线,部分甲虫后翅折叠过程是先重叠后再折叠,而多数甲虫后翅折叠过程中不重叠[11]。甲虫后翅的折叠方式主要有单结点式、多结点式和扇形等[12]。
如图2(a)和图2(b)所示,通过扫描电镜发现,甲虫后翅的翅膜上下表面,皆分布有刚毛,其尺寸相似、方向相反[13]。结合高速摄像机下捕捉的甲虫后翅展开机制,表明腹部表面和后翅翅膜上的刚毛具有一定的自锁性,有助于后翅折拢于鞘翅之下[14]。此外,甲虫后翅及腹部的刚毛还具有保护体内水分、抑制体液蒸发、减缓外部刺激等作用[15]。如图2(a)和图2(c)所示,甲虫后翅前缘脉上存在褶皱结构,这种结构在甲虫飞行及其后翅的折叠/展开过程中起着积极的作用并有助于后翅的弯曲,同时亦具有抗风和减阻的特性,但在大多数其他不折叠翅的飞行昆虫中却没有发现这种特殊的褶皱结构[16-17]。
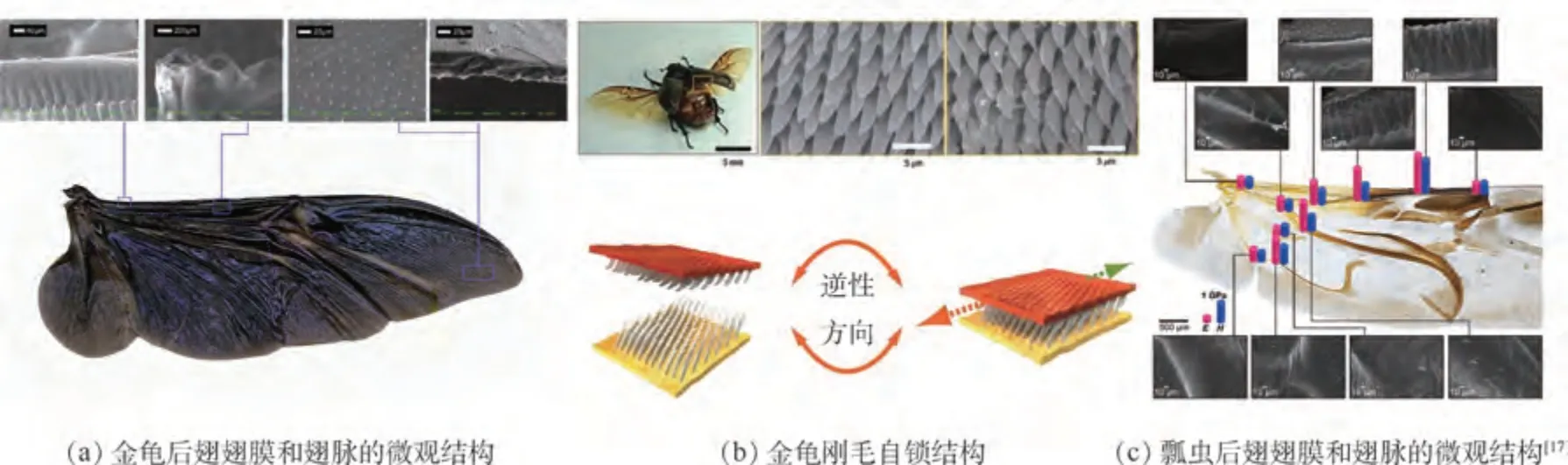
图2 甲虫后翅微观结构Fig.2 Microstructure of the beetle’s hindwing
由后翅翅脉组织切片(图3)发现,甲虫后翅的一部分翅脉是中空的,里面有神经和体液等组织。这些组织一方面对翅脉的刚度有所影响,另一方面能够在甲虫后翅折叠/展开时起到液压推动作用,此外其还对控制后翅进行适当的振动变形有所帮助[18-19]。甲虫后翅被动变形和控制(包括展开、扑动、飞行自适应、折叠和互锁)是通过多因素协同作用实现的,如肌肉、翅脉、后翅折叠方式、节肢弹性蛋白和刚毛(存在于后翅表面和鞘翅内表面)等[20]。
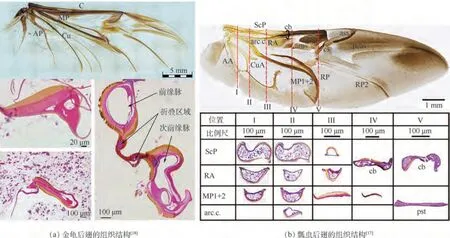
图3 甲虫后翅组织结构Fig.3 Tissue structure of the beetle’s hindwing
2.2 甲虫后翅体液
通过倒置荧光显微镜测试发现,在瓢虫腹部注射荧光标记液后,其后翅的前缘脉中出现了绿色荧光(图4(a)),表明瓢虫的前缘脉中具有体液,并且该体液由腹部流向后翅[21]。同样在眼底显微镜下发现,经过荧光标记的金龟后翅,也出现了绿色荧光(图4(c)),金龟的腹部-后翅亦具有体液的流动[18]。值得注意的是,瓢虫和金龟后翅的体液并不是充满每根翅脉,只在较粗壮的翅脉(通常为前缘脉)和各翅脉的根部才有。前缘脉中的体液只流动到折叠点附近,之后体液便不再继续流动,表明体液有助于后翅克服“自锁”结构进行展开运动[22]。在翅脉体液的液压作用和弯曲关节的节肢弹性蛋白(图4(b))弹性恢复机制的共同作用下,甲虫后翅能够完成折叠/伸展的动作[23]。
甲虫在伸展后翅以准备飞行的过程中,其腹部的体液逐渐运动至翅基和翅脉中,这一过程使得翅脉中体液的压力发生了变化,并出现两个峰值(图4(d))。第一个最大峰值对应后翅展开的开始,峰值压力最大值在6.07~9.29 Pa 之间变化,释放液压的总时间比展开后翅所需的时间要长,压力与翅膀的长度和身体的质量成正比,有助于其后翅进行展开[18]。体液只流过前缘脉,结束于边缘关节,然后转向径脉和中脉,结束于横向褶皱。
2.3 甲虫后翅材料力学性能
甲虫后翅的翅膜薄而富有弹性、翅脉刚性韧性兼具,翅膜和翅脉出色的力学性能使得后翅在气动力、惯性力和弹性力的作用下,可以发生柔性扭转变形并产生高升力及特殊的非定常涡旋[24]。目前描述甲虫后翅力学性能的参数主要为弹性模量和硬度,其中以弹性模量为主,而弹性模量通常使用微型拉伸测试仪或纳米力学测试系统来测定。由于甲虫后翅薄而小,小型拉伸测试仪难以分别对翅膜和翅脉进行测定,故多采用纳米力学测试系统来获得其弹性模量。
甲虫后翅的纳米力学性能与其后翅的飞行机理相对应。由于翅脉是后翅最主要的承载结构,而翅膜是后翅最主要的形变结构,翅膜和翅脉的弹性模量和硬度值存在一定的差异性[25]。如图5(a)所示,同一根翅脉的不同位置具有各异的弹性模量值,导致其形变能力具有一定差异性;如图5(b)所示,不同翅脉的弹性模量存在一定的差异性,其在后翅中的承载和变形作用亦不同,因而具有不同的弹性形变能力。
研究者对瓢虫、金龟和天牛三种迁飞性甲虫的后翅进行纳米力学测试发现:三种甲虫前缘脉上的弹性模量和硬度值都是从翅基向外逐渐增长的趋势,其中瓢虫后翅的弹性模量和硬度值在三种甲虫中最小,天牛后翅的最大。可能的原因就是星天牛后翅更长更宽,其翅脉厚度在三种甲虫中也是最大的,在飞行过程中受到的力也是最大的,后翅需要更大的弹性模量和硬度值来抵抗较大的力,以防止后翅发生破坏[10,16,25]。
3 甲虫后翅力学性能
3.1 甲虫后翅结构力学和模态力学性能
甲虫后翅中,一部分粗壮的翅脉为空心结构,里面有体液和神经等组织。另一部分细小的翅脉为实心结构[16]。在此基础上,分别建立了三种甲虫后翅模型,将翅脉设置为空心、实心、空心+体液三种结构,并对其进行结构力学分析(图6(a))和模态特性分析[23]。甲虫后翅翅脉中的体液,若在飞行过程中假定为静态,则其在弯曲和扭转变形中无附加作用[26]。体液对后翅动态特性具有较大影响,若可调控体液的流量和分布,将有助于设计新型微飞行器。从降低后翅质量的角度来讲,充满体液的翅脉将具有更好的机械性能和飞行特性。
考虑甲虫后翅模型的质量和刚度分布,建立其各向异性结构模型;并根据测量数据,建立了由翅膜和锥形脉组成的仿生翼,其中锥形脉的截面为中空圆形(图6(b))[27]。对模型进行模态特性分析后发现,不同频率下后翅的变形,有利于气流向下流动并产生较大的升力[28]。由甲虫后翅纳米力学特性可知,后翅中相同翅脉的不同位置具有不同的弹性模量,在此基础上建立了“三段分布式”的甲虫后翅模型(图6(c))。其前缘脉由具有不同弹性模量值的翅脉段组成,将其与正常组分别在相同条件下进行结构力学模拟(图6(c)),对照分析后表明,“三段分布式”的模型其总体形变量和应力值都要比正常的模型小[16]。
3.2 甲虫后翅气动力学性能
甲虫后翅飞行时的扑翼动作通常在扑翼平面(Stroke Plane)内进行,扑翼运动主要由平动和转动两部分组成,一个拍动周期可分为下扑、仰旋、上挥和俯旋4 个阶段[29]。甲虫后翅在扑动过程中会发生弹性变形,导致后翅扭转和弯曲——这两个重要特征会影响后翅产生气动力的效率。甲虫主要依靠其后翅的“∞”型扑动方式进行飞行,并通过灵活变换攻角来调整后翅姿态以获得更优的气动特性,柔性后翅的扭转能够使得其在上扑时也能提供部分飞行升力[30]。
此外,如延迟失速、旋转循环、翻转效应、尾流捕获以及翼翼互动等运动机制,亦被作为扑翼飞行高升力的产生原因进行了探讨[31-33]。与其他飞行动物不同的是,甲虫的鞘翅也能在飞行过程中产生涡旋,提供一部分补偿动力[34]。
甲虫后翅在向下扑动时并不是一种平面结构而是一种弧形结构,其翅尖、翅面以及翅基呈现“)”反拱形的状态,这种状态能够使得后翅在获得升力的同时具有更高的强度和韧性[35-36]。在刚性翼与柔性翼的对比试验中发现,昆虫翅翼的被动变形可减弱其在尾流作用中的不利因素,从而增大升力,当翅翼存在一定的展向与弦向变形时,可显著提升推力[37]。
采用三台高速摄像机(图7(a))观察甲虫的刚性鞘翅和柔性后翅的三维运动轨迹(图7(b))及变形(图7(c)),并使用线性变换算法进行分析,发现后翅的柔韧性对升程运动(出行程平面)的影响最为显著[38]。相对于扑翼角和迎角,偏航角沿翼展的局部变化更为明显。甲虫在飞行时其后翅的运动(图8(a))主要分为四个行程,分别为后翅加速下扑动行程、后翅向上扭转行程,后翅加速上扑行程以及后翅向下扭转行程。后翅在进行加速扑动和减速扭转时会对周围的流场造成扰动,使得周围流场对后翅产生一个垂直于后翅平面的反作用力,又被称为“虚质量”[39]。
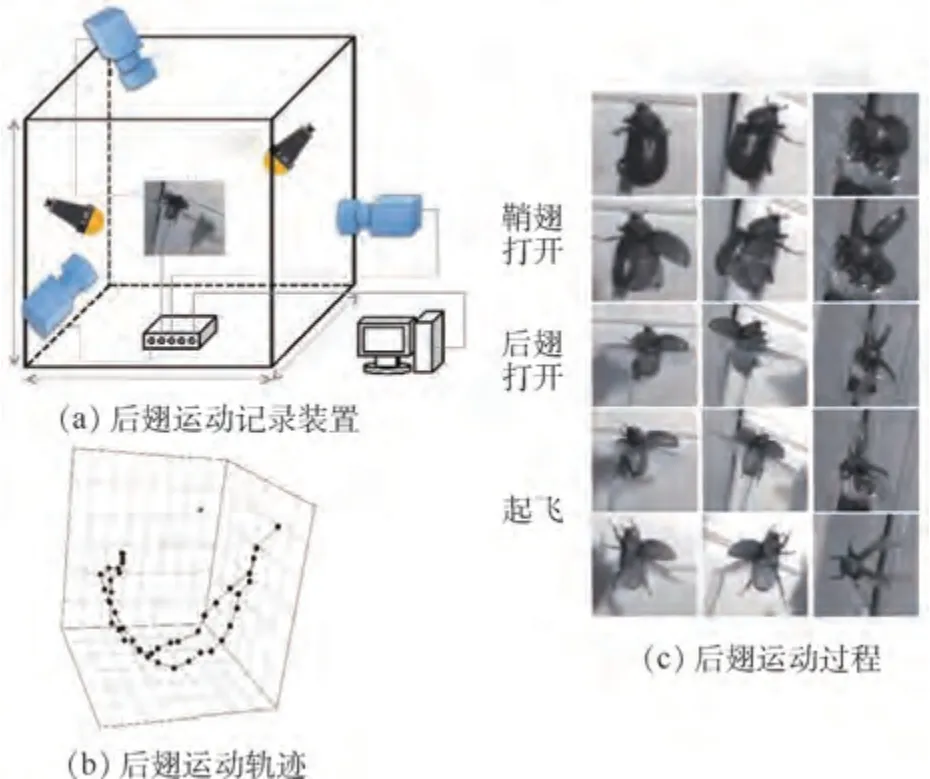
图7 甲虫后翅运动轨迹Fig.7 Movement trajectory of the hindwing
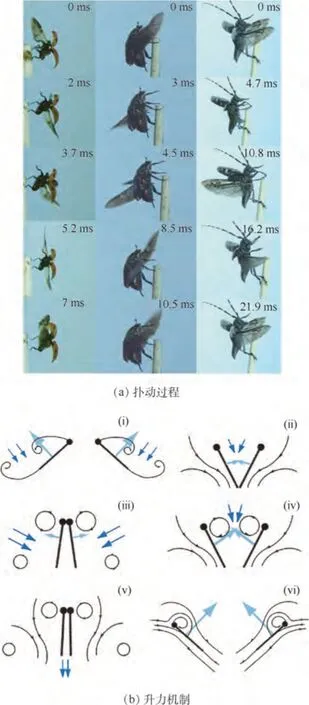
图8 甲虫后翅扑动过程及升力机制Fig.8 Hind wing flapping process and lift mechanism
在甲虫后翅向下扑动的行程中,气动涡流首先接触后翅的前缘(图8(b)i),然后左右两个后翅逐渐合拢(图8(b)ii)。相反的环流使得尾缘涡流脱落的现象大大减少,有利于扑翼飞行(图8(b)iii)。与此同时,当左右后翅逐渐靠近时,两翅间的空气流体将被喷射出来,这可为甲虫飞行提供额外的升力。当甲虫后翅进入扭转行程时,左右两翅的前缘会分开,但后缘保持静止。这种运动将导致一个低压区域产生,周围的气流将涌入该区域,帮助形成环流和涡流进而继续提供升力(图8(b)iv~vi)[40-41]。
4 FWMAV可折叠机翼
4.1 FWMAV可折叠机翼静力特性
在低速飞行中,甲虫后翅会发生弹性弦向变形,特别是在接近后缘端的部分,从而形成相当大的扭转和正拱度[42]。与大多数飞行动物不同的是,甲虫的后翅会在弦向和展向两个方向旋转,在上扑和下扑时都能产生升力,其后翅既承受扭矩又承受弯矩。
甲虫后翅的主要承载方式分为作用于后翅面的均布载荷、作用于后翅整体的弯矩载荷以及作用于一部分翅面的扭矩载荷等。甲虫相较于其他飞行动物最大的区别在于其后翅可折叠,以甲虫后翅为原型设计的仿生翼,其折叠方式有展向分段折叠(图9(a)i)、部分后翅向内旋转折叠、沿翅脉骨架收缩折叠(图9(b)i~ii)[43-45]等。由于材料成型、控制技术以及制造技术等限制,制造出来的仿生翼与生物本身差距较大,目前常用于仿生翼的分析方式主要有结构力学分析、模态力学分析以及数值模拟分析等[46-48]。
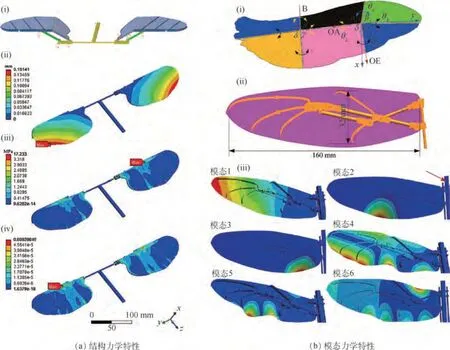
图9 FWMAV机翼结构力学特性和模态力学特性Fig.9 Structural and mode mechanical properties of flapping wing
如图9(a)所示,经过结构力学分析以后发现,以展向分段折叠作为仿生翼的折叠方式时折痕处的应力最为集中,折叠部位的结构强度较为薄弱的环节应采用强度更高的材料以提高此处的抗破坏能力。如图9(b)iii 所示,经过模态力学特性分析后发现,以沿翅脉骨架收缩折叠的方式作为仿生翼折叠方式时,该仿生翼的弯曲模态和扭转模态与普通翼模态一致,可根据动稳定性指导扑翼机构的设计[43]。如图10 所示,对仿生翼沿翅脉骨架收缩折叠的过程进行仿真分析时发现,在折叠过程中其应力-应变分布均匀,翼膜未被撕裂,连杆未穿透翼膜,翼根与四杆机构连接的翼膜上出现了较大的应力,这是因为两个连杆的剪刀式运动和四个连杆的相对旋转都拉伸了翼膜[43]。
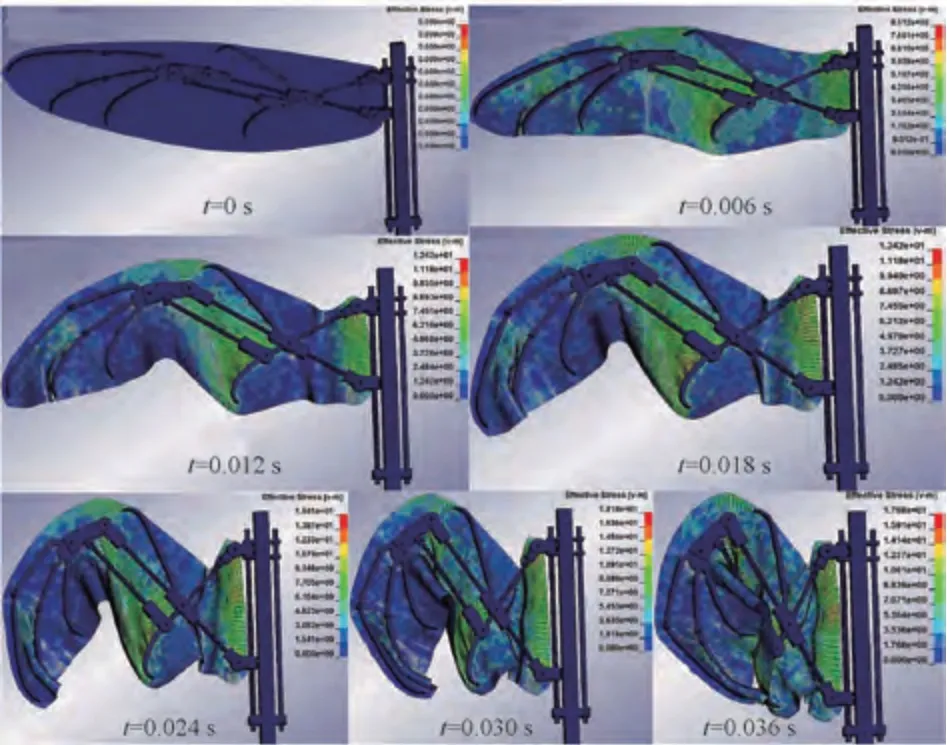
图10 FWMAV折叠过程有效应力分布图Fig.10 Effective stress distribution of flapping wing during folding process
4.2 FWMAV可折叠机翼气动特性
在低雷诺数飞行的情况下,由于不利的粘性效应的增加,旋翼和固定翼在悬停飞行中产生升力的效率降低,而FWMAV 使用的往复式扭转扑动机翼,能够利用非定常空气动力学机制增加升力[49]。扑翼的柔性灵活机制可以有效地减小高频拍翼运动带来的惯性力[50]。对柔性机翼进行参数化研究发现,机翼变形可以使微飞行器承担更少的俯仰运动,从而降低机械功率,提高飞行效率[51]。柔性扑翼的扭转,可以弥补前飞过程中因扑动导致的跨向攻角的增大[52]。研究表明,机翼的灵活性提高了飞行器的负载能力[53]。平移阶段的延迟停滞,提高了尾流捕获效果和飞行效率[54]。
翼面俯仰和旋转运动对其气动性能影响很大,研究发现,在固定俯仰幅值的情况下,较多的下冲程时间和较高的机翼转速均有利于FWMAV 获得高升力[55]。在俯仰运动中,当攻角达到90°时,机翼的拱度改善了其上的流动粘附力、增加了其升力,并在动态失速和行程逆转期间延迟了气流分离[56]。昆虫在悬停飞行过程中,翅膀与尾迹之间的相互作用是不可避免的,但减小仿生翼的展弦比可以增强冲程反转时的翼尾迹相互作用(图11)[57]。
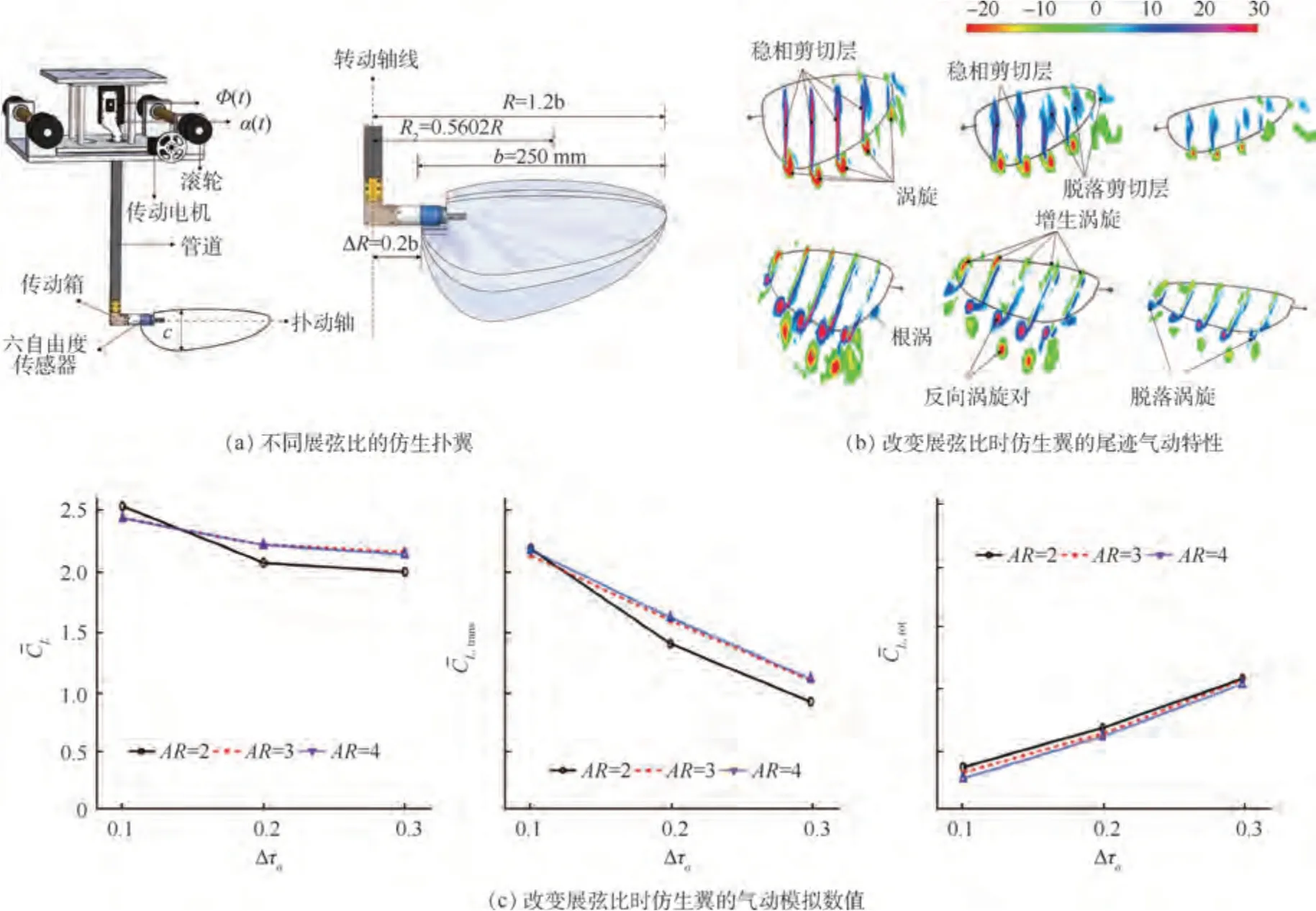
图11 仿生扑翼及其气动特性Fig.11 Bionic flapping wing and its aerodynamic
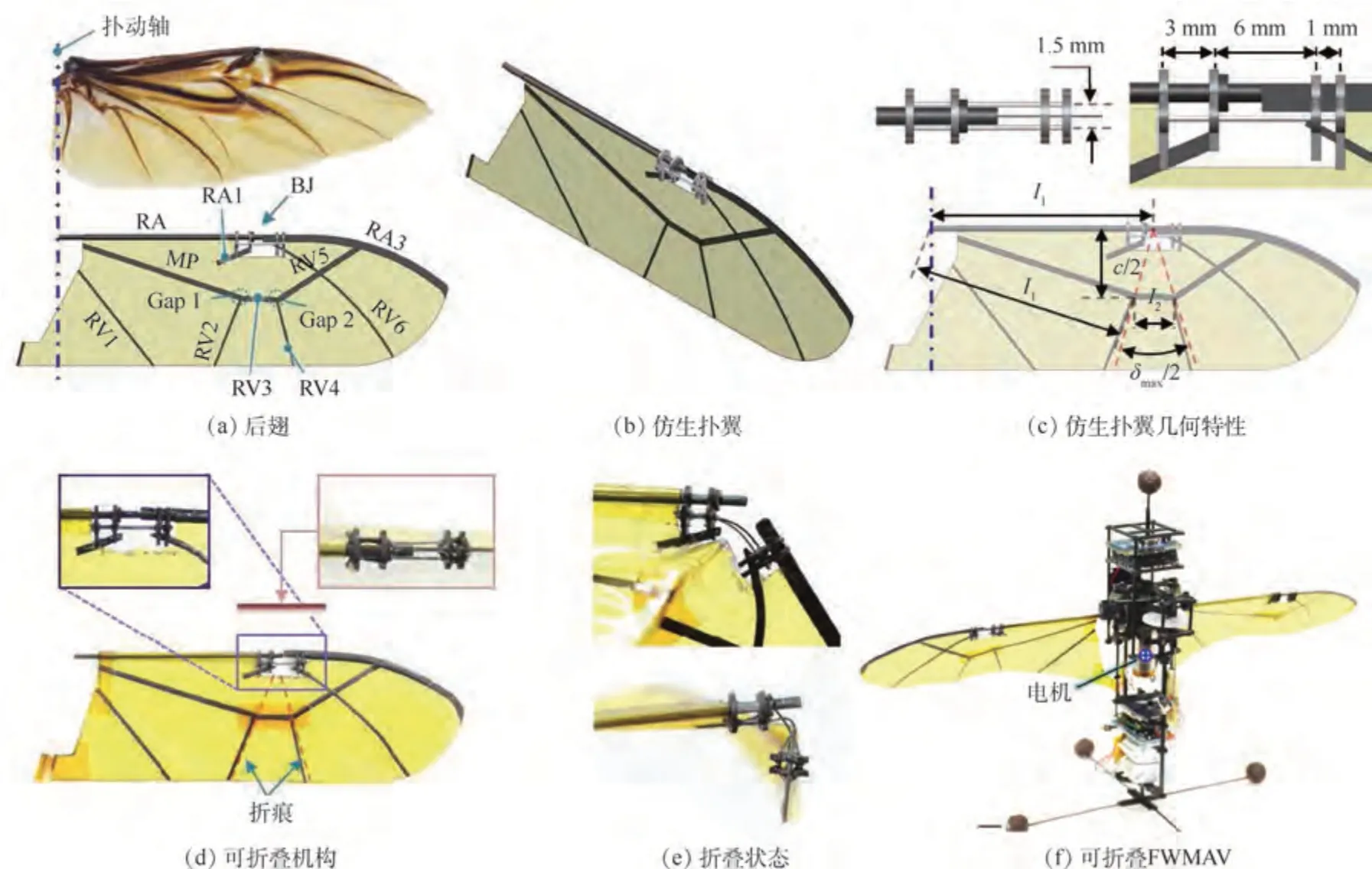
图12 仿双叉犀金龟后翅减振可折叠FWMAV[58]Fig.12 FWMAV of foldable wing with vibration damping imitation the hindwing of A. Dichotoma[58]

图13 仿铜绿丽金龟后翅可折叠FWMAV[59]Fig.13 FWMAV flapping wing biomimetic the hindwing of A.C. Motschulsky[59]
4.3 仿甲虫后翅的可折叠机翼具体应用
Hoang 等发现,双叉犀金龟(Trypoxylus dichotomus)后翅具有类似折纸的褶皱结构(图 12(a)~(c)),可以在飞行中后翅碰撞时起到重要的减振作用。当后翅与物体相撞时,它会沿着褶皱折叠,并在一次次撞击中弹回原位,碰撞因此被抑制,帮助甲虫迅速恢复飞行。进而研究者们在一个扑翼机器人的机翼上实现了这种机制,从而使FWMAV 在碰撞后能够安全飞行(图 12(d)~(f)),该成果被认为在解决FWMAV 机翼碰撞等问题上有着重大的借鉴意义[58]。该FWMAV 质量17.8 g,扑动频率可达26 Hz,可以实现无尾翼多自由度飞行。
由Dufour 等设计的基于折纸理论的仿生可折叠FWMAV(图 13),其设计灵感来源于铜绿丽金龟后翅。基于 Haas 建立的 Four-creases knots 折纸理论,结合了铜绿丽金龟后翅的折叠方式以及折叠痕迹,建立了飞行器的可折叠后翅。该机翼可通过一个简单的操作在半秒钟内折叠或展开,通过理论设计与加工制造证明了在FWMAV 上实施折纸翼的可行性[59]。该FWMAV 质量26 g,折叠比为1.74,飞行速度可达5 m/s。
根据Zhang 等的研究[60],甲虫后翅存在“水力机制”:基于甲虫后翼折叠/展开机理和液压驱动原理,后翅是在液压和弹性机制的综合作用下完成展开动作的,在鞘翅和胸肌的联合作用下完成折叠动作。根据此原理采用了一套由液压系统和弹性系统组成的可以实现折叠/展开的后翅机构。该方案设计的机翼在展开过程中的水力机制和形态变化为完成折叠机翼的项目设计创造了可能。在研究了机翼液压系统内部压力与折展角和温度变化的关系后,发现液压系统中的压力随着温度的升高而增大,从理论上证明了液压驱动可折叠翼设计的可行性。
上海交通大学设计了一种质量仅为247 mg 的硬币大小的压电驱动微型飞行器。它具有四个对称分布的仿生柔性机翼,采用薄膜印刷电路、图形激光和层压工艺进行平面设计和整体制造,并采用形状记忆聚合物(SMP)进行自组装。机翼在柔性电路加热下收缩,从而实现铰链的自折叠和FWMAV 从二维形状到三维形状的自组装。柔性四杆机构将锆钛酸铅(PZT)的轻微振动转化为柔性翼的往复运动,从而产生升力。结果表明,该样机可以自组装到设计位置,并在280 V驱动信号及134 Hz 共振频率下实现23.5°往复角折叠。
5 结束语
本文对将甲虫后翅的研究应用于FWMAV 仿生可折叠翼研制的前沿交叉领域进行了综合评述,在分析甲虫后翅结构、力学性能以及可折叠柔性翼的研究现状后发现:
(1)甲虫后翅翅脉的排列分布具有的褶皱结构以及体液的流动,对后翅的承载能力和动稳定性具有十分重要的影响。后翅的翅脉和翅膜之间,翅脉和翅脉之间,同一翅脉的不同位置之间,其纳米力学材料特性具有各向异性,因而具有不同的承载和弹性形变能力,这将有利于后翅进行柔性扭转形变。
(2)柔性翼的被动变形被认为是甲虫扑动飞行(无尾翼扑动飞行)具备高升力的重要原因之一,翅翼的被动变形可减弱其在尾流作用中的不利因素,从而增大升力,提高飞行效率。
(3)以甲虫后翅为原型设计的仿生翼具有明显的尺寸优势。沿翅脉骨架收缩折叠时,仿生翼的弯曲模态和扭转模态与甲虫翅翼模态的一致性较优,可根据动稳定性指导扑翼机构的设计。
(4)FWMAV 机翼设计类似后翅的褶皱结构,可以在飞行中后翅碰撞时起到重要的减振作用。以后翼折叠/展开机理和液压驱动原理为基础设计的机翼,在展开过程中的水力机制和形态变化为完成折叠机翼的项目设计创造了可能。
(5)与双翅目昆虫相比,甲虫第二对后翅可向内旋转折叠,有利于实现FWMAV 的进一步微型化发展。前一对后翅进化为鞘翅,可以保护后翅不受损坏,但会在飞行升力上发生损耗。
未来以甲虫后翅为仿生原型,研制适用于FWMAV的可折叠柔性翼,应着眼于柔性翼骨架结构和机翼翼膜材料属性的各向异性,以期制造出可折叠、易扭转、高弹性的微飞行器机翼。
猜你喜欢
幼儿画刊(2023年3期)2023-05-26
实验流体力学(2023年1期)2023-03-21
小哥白尼(野生动物)(2021年4期)2021-07-29
小哥白尼(野生动物)(2021年1期)2021-07-16
装备制造技术(2020年1期)2020-12-25
空间科学学报(2020年4期)2020-04-22
中成药(2018年12期)2018-12-29
童话世界(2017年8期)2017-05-04
海南医学(2016年8期)2016-06-08
中国民族医药杂志(2016年9期)2016-05-09
