基于GA-PSO-Otsu算法的质子交换膜燃料电池催化层孔结构自适应识别
2023-10-12 02:16袁新杰侯中军
汽车工程 2023年9期
袁新杰,刘 芳,侯中军
(上海捷氢科技股份有限公司, 上海 201804)
前言
在《氢能产业发展中长期规划》的推动下[1],规模化的氢能产业应用生态体系要求燃料电池具备更高效且自动化的技术,其中催化层作为电化学反应的核心零部件,对其孔结构精确自动的识别测算成为大功率、高可靠性和长耐久性燃料电池汽车规模化的重要因素[2]。
质子交换膜燃料电池催化层是电化学反应的重要场所,多孔结构是其重要的特征之一。在理想的催化层多孔结构中,孔隙结构负责气相反应物的传入和液态水生成物的排出,而催化剂固体负责电子和热量的传输,其表面覆盖的离聚物负责质子传输,因此需要孔隙、催化剂固体和离聚物固体之间的空间平衡[3]。文献[4]中的研究显示孔径<2 nm 的微孔对催化层的高水蒸发率有重要作用,而文献[5]中揭示了燃料电池催化层在高湿度的条件下,以孔径2~50 nm 为中心的介孔分布有利于液态水的排出。因此,燃料电池催化层的孔结构(包括孔径分布以及孔隙率)的高效、精确和自动化的识别和测算是批量化生产研制催化层的重要因素,也是影响规模化燃料电池性能的重要因素。
目前催化层孔结构的测算方法以压汞体积法为主要测算手段,扫描电镜法为辅助观察工具,主要存在4 大问题。第一,压汞体积法对实验操作要求苛刻,如文献[6]中通过催化剂和压汞仪汞填充体积测算孔结构,但受不同材料对汞的表面张力及接触角经验估算影响;第二,扫描电镜图肉眼测算效率低,如文献[7]中采用聚焦离子束观察催化层截面,但催化剂、孔结构和背景色粘连明显,难以肉眼测算孔径分布和孔隙率;第三,目前催化层扫描电镜图识别缺乏先进的图像识别技术,如文献[8]中采用深度学习堆叠二维催化层源图,手动调参建立三维模型,但遗漏识别大量介孔,且无法自适应寻优复合参数;第四,传统二值化阈值法[9]须遍历所有参数且粒子群算法易陷入局部优化,因此对背景与目标色度差异小、灰色过渡区域多、介孔捕捉难度大和灰度差异大的催化层扫描电镜图的自适应测算效果差。
现有车规级燃料电池催化层孔结构的表征方法以压汞法为主,扫描电镜法为辅,前者存在实验要求苛刻的问题[6],后者就催化层二维表征缺乏对催化层孔结构的自适应图像识别测算方法[7],且传统二值化阈值法[10]和PSO粒子群算法[11]存在缺少去噪及自适应能力和全局搜索能力差的问题。因此,本文的研究目的为:设计GA-PSO-Otsu 算法实现高效、精确且自适应测算不同亮度对比度的催化层扫描电镜图(灰色区域多、介孔识别难、背景与目标色度差异小)孔径分布和孔隙率。
本文所设计的GA-PSO-Otsu 算法的主要贡献和创新点为:
(1) 现有膜电极扫描电镜法肉眼定性观察效率低精度差,实现催化层孔结构实时定量测算;
(2) 优化传统固定阈值二值化算法无法自动识别灰度值差异大的源图的问题;
(3) 优化传统Otsu 算法遍历所有参数导致的效率低和未考虑噪声对精度影响的问题;
(4) 优化传统粒子群算法易陷入局部优化的问题。
因此,本文旨在通过设计一种基于遗传粒子群的最大化类间方差(genetic algorithm-particle swarm optimization-Otsu, GA-PSO-Otsu)优化算法,高效、精确且自适应地测算催化层扫描电镜图的孔径分布和孔隙率。
1 扫描电镜实验及GA-PSO-Otsu 优化算法
传统的最大化类间方差采用枚举二值化阈值的方法,区分目标和背景色度,但该方法须遍历所有可能的二值化阈值及相应的方差,耗时大且效率低。为提高寻找最大化类间方差的效率,传统的单目标PSO 粒子群算法可通过模仿鸟群在一定范围内觅食的生物特性、迭代位置和速度高效寻找函数极值[11],但是易陷入局部优化,导致灰度图孔结构识别错误[12]。因此,本文基于遗传粒子群的最大化类间方差(GA-PSO-Otsu)优化算法复合融入图像去噪参数和二值化阈值参数,提高传统PSO 和Otsu 的全局搜索能力和收敛速度,避免陷入局部优化。
1.1 催化层扫描电镜图制备过程
本文所述扫描电镜图中的催化层通过超声喷涂方法制备得到。首先,将定量Pt/C 催化剂、超纯水、全氟磺酸树脂(20wt% D2020, 杜邦)和正丙醇按照一定比例和上述顺序通过混浆逐步添加,再通过珠磨工艺制备催化剂浆料(IC 比为1.1)。然后,将催化剂浆料通过超声喷涂机(美国 USI PRISM 400)在质子交换膜的一侧喷涂0.3 mg/cm2Pt 载量的催化层。最后,通过Gantan 697 氩离子抛光设备抛光上述制备样品得到催化层截面,再通过ZESSI Gemini 360 扫描电镜仪器进行催化层孔结构表征,获取催化层截面的扫描电镜图,过程如图1所示。
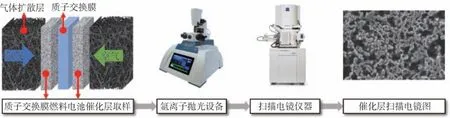
图1 质子交换膜燃料电池催化层的扫描电镜实验过程
1.2 目标函数
为减少图1 中催化层扫描电镜灰度图噪声造成的识别误差,将催化层灰度图与正态分布进行卷积操作,实现催化剂和孔结构边界的平滑化和连续性,如图2 所示。图2 中二维正态分布的高斯卷积核G(u,v)的半径为rg,边长为2rg+1,其赋值定义如式(1)所示[13]。为去除影响孔结构识别的噪声,催化层灰度图所有像素(x,y)的灰度值I(x,y)依次取边长为2rg+1 的矩阵与高斯卷积核进行内积,赋值至图2右侧的中心点,即获得该像素的灰度值^(x,y),值为i,重复该步骤至更新所有像素,如式(2)所示[14]。
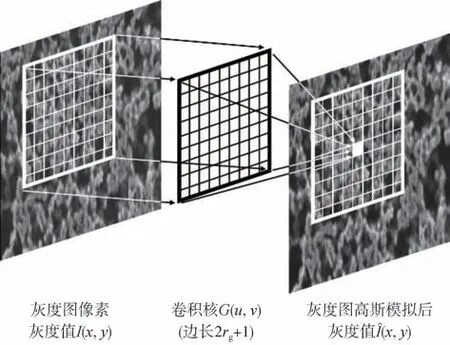
图2 以图1中催化层扫描电镜图为例的高斯模糊过程
式中:G(u,v)表示高斯卷积核在 (u,v)上的权重值;σ为高斯标准差;I(x,y)表示源灰度图中坐标为(x,y)的像素灰度值;i和(x,y)表示高斯模糊后灰度图中坐标为(x,y)的像素灰度值,其值为0~255 的闭区间。
为实现高斯模糊去噪后对催化层孔结构的二值化取反识别,分别计算识别为催化剂和孔结构的概率和平均灰度值[15],如式(3)~式(7)所示。
式中:thres为二值化阈值;pi为每个像素灰度值为i的概率;ni为二值化取反后灰度值为i的像素数量;pcatalyst,thres为识别为催化剂像素的概率;mcatalyst为识别为催化剂的像素的平均灰度值;mall为所有像素的平均灰度值。
本文的目标函数旨在最大化类间方差f(rg,thres)实现孔结构和催化剂的最优聚类,如式(8)所示[16]。
式中mall、mcatalyst和pcatalyst,thres由式(1)和式(2)中高斯卷积核半径rg和式(3)~式(7)的二值化阈值thres共同决定。
1.3 约束条件
基于第1.2 节中目标函数最大化类间方差的约束条件如式(9)和式(10)所示。
式中:rg,min和rg,max为高斯卷积核半径最小值和最大值;thresmin和thresmax为二值化阈值的最小值和最大值。
1.4 GA-PSO-Otsu优化算法流程
本文引入遗传算法和粒子群算法优化最大化类间方差法,旨在改变传统最大化类间方差遍历所有参数耗时长和粒子群算法易陷入局部优化的问题,该GA-PSO-Otsu 算法在催化层孔结构识别应用的流程如图3所示,具体阐述如下。
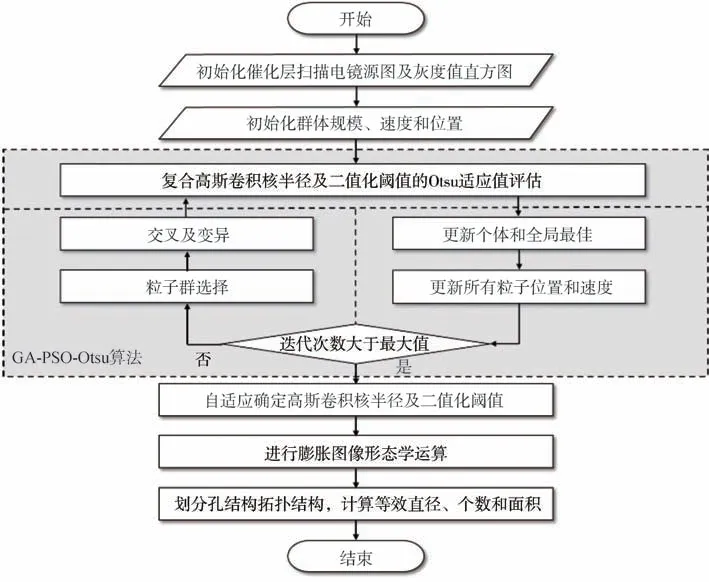
图3 遗传算法-粒子群-最大化类间方差(GA-PSO-Otsu)优化算法的催化层孔结构识别流程
(1)优化Otsu 适应值评估。首先根据初始化的催化层扫描电镜源图和灰度直方图,建立粒子群算法的群体规模Npop、初始速度v和位置x,并根据第1.2节所述的Otsu 目标函数完成复合高斯卷积核半径rg及二值化阈值thres的Otsu适应值f(rg,thres)评估。
(2)根据PSO 粒子群算法更新所有粒子的个体最佳pbest,其中最优个体最佳为该循环的全局最佳gbest,根据第s轮循环的个体最佳pbest和全局最佳gbest更新所有粒子的速度v(s+ 1)和位置x(s+ 1),如式(11)~式(13)所示[17]。
式中:v和s分别为粒子的速度和位置;s为第s轮循环;ω(s)为第s轮循环的惯性权重;c1和c2为学习因子;r1和r2为介于0~1 的开区间的随机数;pbest和gbest为个体和全局最佳;ωs和ωe分别为初始和迭代至最大循环次数的惯性权重;smax为最大循环次数。
(3)在完成一次PSO 粒子群算法更新所有粒子的位置和速度后,采用GA 遗传算法选择、交叉和变异产生新的随机粒子。首先,从更新后的所有粒子中按照式(14)所示的概率选择x1(s+ 1)和x2(s+ 1)两个粒子[18];其次,在满足交叉和变异概率的条件下,对选择的两个粒子进行如式(15)~式(17)所示的交叉和变异[18];最后,对更新后的粒子x′(s+ 1)根据目标函数计算其Otsu 适应值,与PSO 粒子群算法的个人最佳对比后更新个体和全局最佳值,重复循环至满足最大迭代次数smax。
式中:pselection(npop)为第npop个粒子被选中的概率;fnpop为第npop个粒子的目标适应值;Npop为粒子群种群的总粒子数,即种群规模;x1′(s+ 1)和x2′(s+ 1)分别为交叉后两个粒子的位置,x1(s+ 1)和x2(s+ 1)分别为选择操作后的位置;a、b、rc和rm分别为0~1 的开区间内的随机数;pcrossover和pmutation分别为交叉和变异的概率。
(4)根据上述GA-PSO-Otsu 算法自适应求得孔结构识别的高斯卷积核半径及二值化阈值,对图像进行膨胀图像形态学运算,提升介孔识别。将孔结构按树形拓扑结构划分等级,计算总数为N的闭合孔面积Sn、等效孔直径Dn和孔隙率ε,如式(18)和式(19)所示。
式中:Dn和Sn分别为第n个闭合孔的等效孔直径和孔面积;ε为孔隙率,即总孔面积与长宽真实尺寸为l×h扫描电镜图面积的比例;N为总孔数。
2 结果与讨论
2.1 案例数据分析
本章采用两份材料配比和扫描电镜图亮度灰度分布差异较大的Pt/C 催化剂为案例,样品1和样品2的长宽像素均为1024 × 696,如图4(a)和图4(c)所示。由图4(b)可见,样品1图具有明显的双峰特性,但双峰间的谷底数值较高,因此灰色过渡区及噪声过多,背景和目标色度差异较小;相较样品1,样品2的灰度直方图不具备明显双峰特性且灰度接近0 的黑色面积占比大,如图4(d)所示。因此以灰度直方图差异大和受噪声影响的样品1 和样品2 作为本章的案例进行分析对比,以验证本文GA-PSO-Otsu 算法的准确性、鲁棒性和自适应性,其核心参数如表1所示。
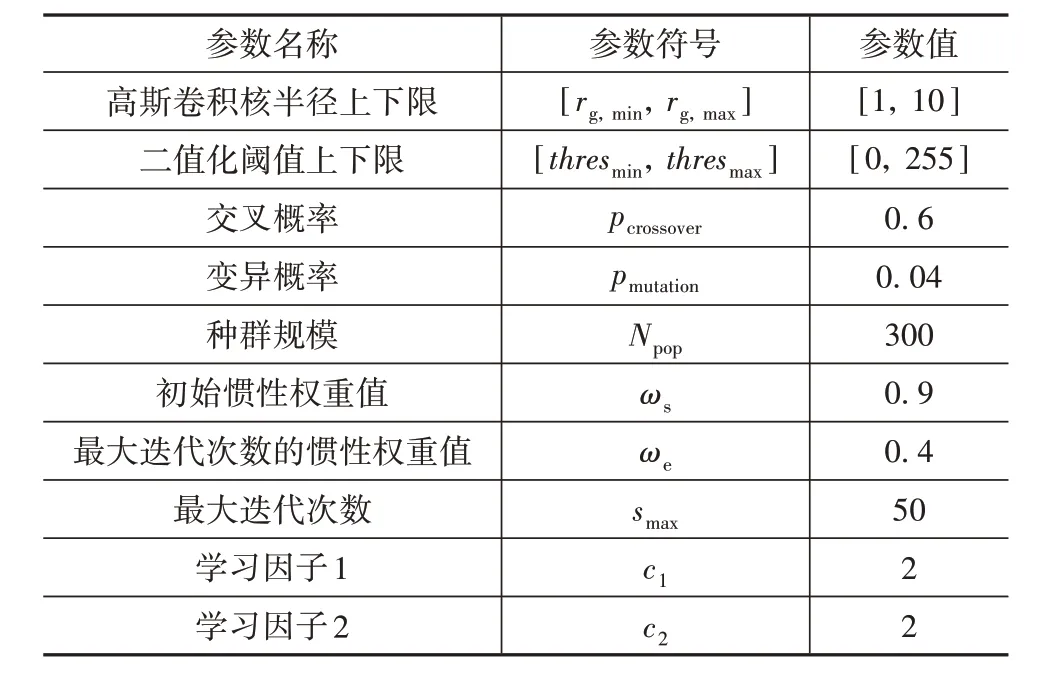
表1 GA-PSO-Otsu算法的核心参数[15,19-20]
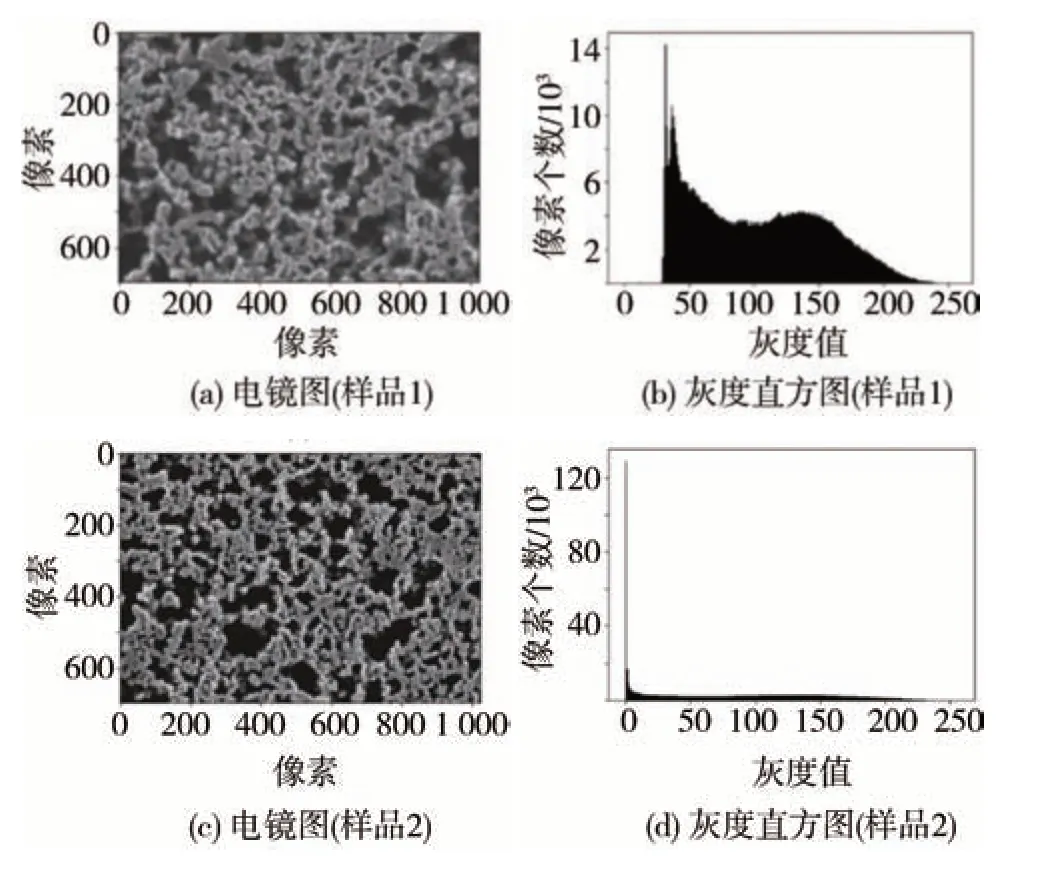
图4 催化层样品1和样品2的扫描电镜源图和灰度直方图
2.2 孔径分布和孔隙率结果分析
基于表1 关于GA-PSO-Otsu 算法的核心参数,为最大化孔结构和催化剂的类间方差σ2,样品1 的自适应高斯卷积核半径为4,高斯模糊后的灰度图如图5(a)所示,去除图4(a)源图的灰度图噪声。样品1的自适应二值化阈值为104,取反处理后的灰度图如图5(b)所示,其中白色区域为孔结构,黑色区域为催化剂,具备介孔和大孔的识别能力。为提高部分极小孔径的介孔和孔结构边缘的辨识效果,进行膨胀图像形态学运算,结果如图5(c)所示。根据算法自适应求得样品2 的自适应高斯卷积核半径为3,二值化阈值为83,其高斯模糊、二值化取反操作以及膨胀处理后的灰度图如图5(d)~图5(f)所示。
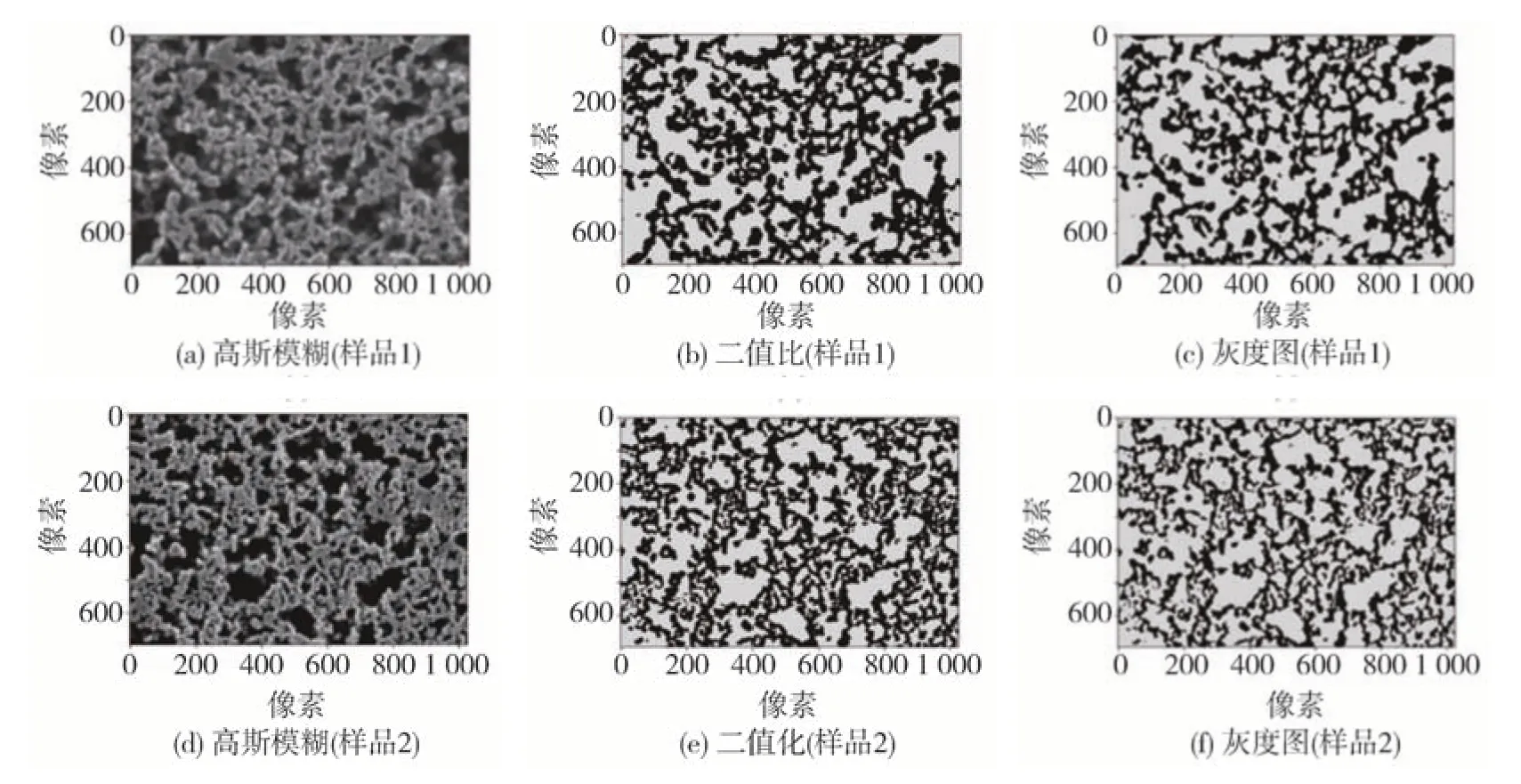
图5 催化层样品1和样品2高斯模糊、二值比和膨胀处理后的灰度图
对图5(c)中样品1 标记所有孔轮廓间的拓扑结构,对所有165 个连通孔编号,转换为三通道图像并勾勒出所有的孔结构形状,如图6(a)所示。如前言所述,介孔对催化层和燃料电池在高湿度条件下的性能影响更重要,因此为实现对不同等效孔直径的个数和面积分布,依次测算连通孔的面积并根据式(18)计算等效孔直径,并对样品1的165个等效孔直径归类至固定的孔直径数组[2, 5, 6, 7, 9, 11,14, 17, 19, 20, 21, 23, 26, 32, 40, 50, 56, 63,69, 77, 101, 121, 151, 183, 227, 285, 350, 434,553], 单位为纳米(nm),如等效孔直径为5.5 nm 的孔位于固定值3和6的平均值与6和7的平均值区间范围内,因此在计算孔径分布的个数时归类为6 nm的固定等效孔直径,孔面积仍保持等效孔直径为5.5 nm 的孔面积进行面积和累加,样品1 的孔径和孔面积分布如图6(b)所示,符合介孔相较大孔更集中的特点,但是由于大孔的等效孔直径远高于介孔,因此大孔面积占比更大。另外,样品1 长宽像素1024 × 696,真实长宽分别为2 309和1 569 nm,扫描电镜图真实面积为3.6 × 106nm2,所有孔面积和为2.4 × 106nm2,因此样品1的孔隙率ε为64.9%,与压汞法所测得的68.6%相对误差仅为5.8%。
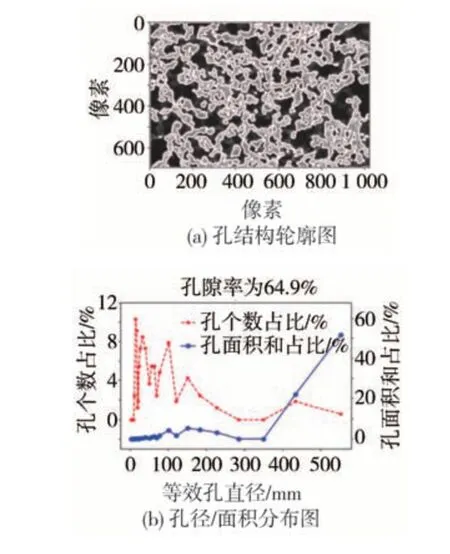
图6 催化层样品1的孔结构识别结果图
类似的,样本2识别出的共223个孔的轮廓图如图7(a)所示,孔径分布和孔面积占比图如图7(b)所示,由于催化层样品1 和2 为配比不同的同一材料,因此虽然扫描电镜源图的噪声、亮度、对比度和灰度直方图不同,本文提出的GA-PSO-Otsu 算法仍能精确识别所有孔结构,孔径分布特点与样品1 接近。样品2 的孔隙率ε为67.5%,与压汞法所测得的72.6%的相对误差为7.0%。
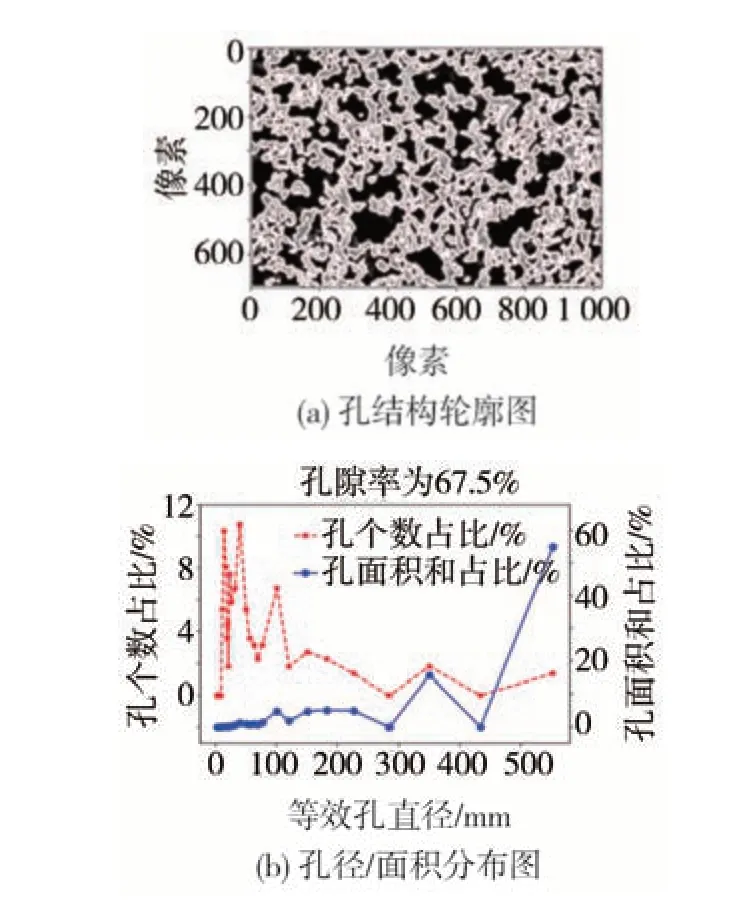
图7 催化层样品2的孔结构识别结果图
2.3 算法对比分析
本节以催化层样品1 为例,对GA-PSO-Otsu 算法和传统算法进行迭代次数、计算精度和运算时间的对比分析。首先,如图8 所示,传统的PSO-Otsu算法经过18 次循环后趋于稳定,全局最佳适应度值为1 959.7,而本论文所采用的GA-PSO-Otsu 算法在21 次循环后趋于稳定,但全局最佳适应度值提高为1 968.7,该值的提升由式(8)可知是由于两个算法所寻优的高斯卷积核半径rg和二值化阈值thres不同,降低了催化剂和孔隙的像素区分误差率。具体来看,如图9(a)不同方法统计后的孔隙率结果对比所示,可知遍历所有式(9)和式(10)范围内的高斯卷积核半径rg和二值化阈值thres的Otsu方法计算所得的孔隙率为65.2%,最接近压汞法所测得的68.6%,而传统的PSO算法由于陷入局部优化导致仅在全局最佳适应度达到1 959.7时就逐渐稳定,导致催化剂和孔隙的像素错误分类的概率提升,测得的孔隙率仅为59.5%,相较Otsu 遍历高斯卷积核半径和二值化阈值所测的孔隙率相差5.7%,而本论文的GAPSO-Otsu 的催化剂和孔隙区分的适应度提升至1 968.7,避免了提前陷入局部优化的问题,使识别为催化剂和孔隙的平均灰度值最接近遍历参数的Otsu 算法,测得的孔隙率为64.9%,仅存在0.3%的绝对误差。
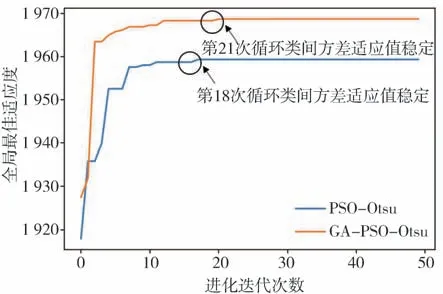
图8 催化层样品1通过PSO-Otsu和GA-PSO-Otsu算法的迭代过程对比图
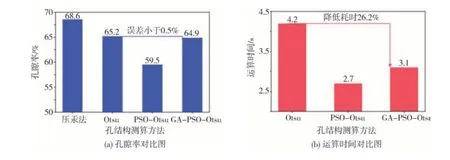
图9 催化层样品1应用压汞法、传统Otsu算法、PSO-Otsu算法和本文GA-PSO-Otsu算法的孔隙率和运算时间对比图
其次,由图9(b)所示,由于GA-PSO-Otsu 算法相较PSO-Otsu 算法在图8 中趋于稳定需要的循环次数相差3 次,GA-PSO-Otsu 算法的耗时增加了0.4 s,约14.8%,但是相较传统的Otsu 算法降低了1.1 s,约26.2%的耗时。综上,本文提出的GAPSO-Otsu 算法相较Otsu 和PSO-Otsu 算法,兼具更好的全局搜索能力和高效的运算时间。因此,该算法兼具高效性、准确率和自适应性,在规模化开展燃料电池催化层材料期间,能够精确地定量测试大量的样品,高效地指导评估材料制备过程,加速燃料电池催化层材料的开发,具有重要的工程化实用价值。
3 结论
提出了基于遗传粒子群的最大化类间方差(GA-PSO-Otsu)优化算法,实现了高效率、高精度且自适应的催化层扫描电镜图的孔径分布和孔隙率的识别和测算。首先,针对传统扫描电镜法肉眼观察效率低精度差的问题,该算法提升了催化层孔结构自动识别和测算能力,提高了数值分析的准确性。其次,通过对两种不同Pt/C 催化剂结构和灰度直方图的催化层扫描电镜图的对比分析表明,该算法优化了传统固定二值化阈值算法自适应能力差的问题,具备识别并判断灰色区域多、介孔识别难度大、背景与目标色度差异小,以及亮度、对比度和灰度分布差异大的不同催化层扫描电镜图的能力。第三,相较传统的Otsu 算法,该算法创新地复合优选二值化阈值和高斯卷积核半径作为自适应参数,与遍历所有参数的Otsu算法的孔隙率误差小于0.5%,测算耗时相较大幅降低约26.2%。第四,相较传统的PSO 算法,本文提出的GA-PSO-Otsu 算法优化了陷入局部优化的问题,提升了对影响燃料电池性能的介孔的识别,兼具运算效率和对孔径分布及孔隙率测算的准确率,提高燃料电池催化层材料研究过程中孔结构的识别效率,未来可以用于三维重构催化层,提高数值分析的准确性。
致谢
本文作者对上海捷氢科技股份有限公司提供的实验仪器和实验数据表示由衷感谢。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
高技术通讯(2021年3期)2021-06-09
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
电线电缆(2017年4期)2017-07-25
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年1期)2016-11-07
中国石油大学学报(自然科学版)(2015年2期)2015-11-10