BDS实时精密动态定位最优观测值弹性选取方法
2023-10-10 14:46叶远斌张献志张永峰
测绘通报 2023年9期
叶远斌,侯 雪,张献志,张永峰
(1. 广东省国土资源测绘院,广东 广州 510500; 2. 武汉大学,湖北 武汉 430079)
随着5G通信、自动驾驶、物联网等技术的快速发展,万物互联时代即将到来。在生产生活中,无人机编队、车辆编队、智能网联车等应用越来越多。精确可靠的实时相对位置关系是安全有效运行的前提,RTK技术利用差分信息获得快速精确的实时相对位置,因此被广泛应用于实时精密定位[1]。
双差观测能够削弱或消除大部分空间不相关误差,当两个平台间的基线长为几千米时,空间相关的对流层和电离层延迟可被大幅削弱[2],双差观测方程中的未知参数仅包含站坐标和模糊度参数,基于单历元观测方程可以快速地获得精确位置结果[3]。随着基线长度的增加,相关性减弱,空间相关误差的残差也随之增加,尤其是电离层延迟,其影响可达几分米[4]。因此,通常采用无电离层组合消除一阶电离层延迟的影响,但与此同时测量噪声和多路径也被放大了约3倍,且卫星观测信息减半。根据电离层延迟处理方法的不同,RTK数据处理可以分为无电离层(ionospheric-free,IF)模型和原始观测模型[5]。
文献[6]采用双频IF模型,研究分析了GPS和BDS的中长基线RTK定位,其静态定位精度优于5 cm。当基线长为101 km时,双差观测值的电离层延迟残差达到10 cm,文献[7]提出了基于基线长的电离层延迟的最优随机模型。文献[8]验证了L1、L2和IF组合观测值间的精度差异。然而,当前研究主要集中在基线长度固定的静态观测上。由于两平台在动态定位时电离层活动不同,会造成较大的电离层残差[9-10]。而IF模型又会放大测量噪声,降低定位收敛速度。当前研究中,不同基线长和电离层活动下,IF或原始观测值模型通常依据经验选取[11]。然而,在动态定位中基线长度不断变化,不同地区电离层活动也存在差异,因此,在不同基线长度和电离层活动情况下选择合适的观测类型和处理方式是高精度动态定位的关键。
本文提出一种新的最优观测值弹性选取(flexible observation selection,FOS)方法。该方法基于电离层延迟残差和基线长度确定合适的B1或IF方法,考虑两种不同方法的特点,以及动态定位中基线长度变化引起的电离层延迟残差和IF测量噪声变化。
1 最优观测值弹性选择FOS方法
1.1 B1双差观测值噪声
动态定位测试采用司南K708板卡,对BDS-2和BDS-3系统公有信号B1和B3进行数据处理。原始信号的规格和配置可以参考K708官网,包括伪距和相位噪声。根据误差传播律可知双差BDS观测值的精度为原始观测值精度的2倍,见表1。

表1 K708板卡BDS双差观测值精度
观测值的实测精度和标称精度之间差异很小,不超过0.5 mm,可以忽略不计[12]。因此,实际应用中可参考接收机标称观测值精度,因此,B1和B3的双差观测值噪声为
σB1≈σB3=1 mm
(1)
1.2 IF观测值噪声
根据误差传播律得到无电离层组合观测噪声[13]为
(2)
式(2)与波长相乘得到以米为单位的无电离层组合观测值噪声为
σIF=10.7 mm
(3)
1.3 观测值选取策略
本文中,每个历元动态定位数据处理使用B1或IF观测值,根据不同基线长的电离层残差与观测噪声之间的大小关系,采用最优观测值,具体如下。
(1)使用B1观测值时,量测误差主要包括电离层残差Ion、非发散的系统误差B及观测噪声σ1。非发散误差项B主要包括对流层延迟残差以及卫星轨道误差等[14],因此B1观测值的定位精度εB1表示为
εB1=Ion+B+σ1
(4)
(2)使用IF观测值时,由于消去了电离层残差,只剩下非发散的系统误差B及观测噪声σIF。LC观测值的定位精度εIF为
εIF=B+σIF
(5)
当σ1+Ion>σIF时,IF观测值的精度更高,反之则B1更高。因此,根据每个历元的B1和IF观测值之间的实际关系确定动态数据处理策略。当数据处理的观测类型发生变化时,动态定位结果可能发生较大跳变。因此,本文将选择条件设置为σ1+Ion>1.2·σIF,避免位置结果出现较大的跳跃。
2 试验分析
采用静态和动态测试验证和分析FOS方法的性能,在武汉采集2021年10月26日至28日近3 d的静态观测数据,并于2021年7月14日在武汉郊区开展了约1 h的车载动态测试。BDS观测数据使用K708 GNSS OEM 板卡采集,采样率为1 Hz。北斗动态定位数据处理策略见表2。
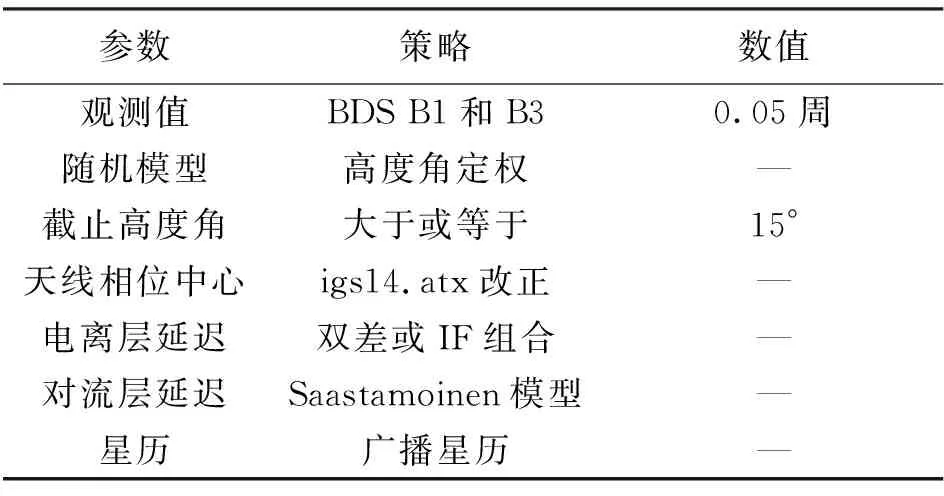
表2 动态定位数据处理策略
2.1 静态测试结果
对静态北斗数据进行仿动态处理,每条基线的观测时长均大于4 h。基线长度:WDKJ-WDXH约为1 142.180 m,WDKJ-WDYH约为8 870.948 m,WDKJ-HNQC约为26 331.126 m。数据时间为2021年DOY 299—301,数据处理策略同表2。采用B1、IF、FOS 3种数据处理模式,将GAMIT/GLOBK软件解算的“真实”坐标作为参考[15]。
以DOY 299为例,分析基线WDKJ-WHYH的结果,其误差序列如图1所示。可以看出,B1模式获取的水平精度在2 cm以内,其精度较高,但高程方向误差较大,模糊度固定率约为98.7%。采用IF模式处理后,水平误差值与B1模式相似。然而由于噪声被放大,部分历元模糊度无法有效固定,其固定率仅为95.2%,导致出现更多的异常值,尤其高程方向误差明显大于B1模式。结果表明,FOS模式的水平和高程方向的误差都小于2 cm,高程方向的偏差和异常值明显减少,固定率达到了99.4%。

图1 基线WDKJ-WHYH测试结果误差序列
图2给出基线WDKJ-HNQC的结果误差序列。可以看出,IF和FOS模式的误差值在3 cm以内,模糊度固定率分别为98.5%和99.0%。B1模式受电离层延迟残差的影响,导致模糊度无法有效地固定,模糊度固定率仅为89.1%,结果序列中出现异常值。同时从图3中可以看出,B1和FOS模式解算的基线WDKJ-WDXH结果序列非常一致。因此,FOS方法适用于各种静态基线长度,能够获得最优的结果。

图2 基线WDKJ-HNQC测试结果误差序列

图3 基线WDKJ-WDXH测试结果误差序列
表3给出了静态测试的统计结果,基线WDKJ-WDYH在FOS模式下的精度最高,在E、N、U方向上的RMS值分别为1.05、0.96和2.08 cm,在IF模式下的RMS值分别为1.12、1.13和2.41 cm,在B1模式下的精度最差。统计所有基线解算结果可以发现,FOS模式在短基线中的精度最高,相对于B1模式,在E、N、U方向分别提升9.6%、7.5%和11.4%,相对于IF模式,分别提高了约 8.6%、9.9%和12.2%。

表3 静态测试统计结果
2.2 动态测试结果
为了验证和评估FOS方法在动态定位中的性能,在梁子湖大道附近,跑车绕池塘行进了大约25 min后回到了起点,静止一段时间后,跑车继续行进直至到达终点,测试时间约70 min。基准站架设在武汉大学科技园,通过Novatel GrafNav软件得到动态测试结果的参考值。图4给出了测试过程中的轨迹和基线长的变化序列。可以看出,在跑车绕水池行进和静止期间,与基站之间的基线长最长,约为16 km。从第32 900历元基线长开始减小,在第35 300历元,跑车与基站间的距离达到最小值1.4 km。

图4 WDKJ-T004测试过程
图5给出了3种模式在不同时段的动态定位结果与参考值在E、N、U方向上的误差序列,3种模式的误差整体都小于在10 cm。由图5(a)可以看出,在跑车绕池塘行驶时,双差观测值无法有效消除大气延迟,尤其是电离层延迟,因此,B1模式难以实现有效的模糊度固定,浮点值导致动态定位结果出现较多的异常值。而IF模式可以消除电离层延迟的影响,实现模糊度固定并获得精确的动态定位结果。此外,FOS模式的定位结果与IF模式相似。

图5 基线WDKJ-T004动态测试误差序列
静止一段时间后,跑车再次进行动态测试,与基准站间的距离越来越近。如图5(b)所示,在第33 500—34 500历元,基线长度由16 km缓慢减小到小于7 km,B1观测值中电离层延迟残差越来越小,模糊度固定率越来越高,定位异常点越来越少,B1和IF模式的定位结果差异越来越小,FOS模式的定位精度在此时段是最高的。在34 500历元之后,基线长逐渐减小到1.4 km,此时B1模式可以消除大部分的大气延迟,且噪声更小,更有利于模糊度的固定。由图5(c)可以看出,B1模式动态定位结果的RMS值远优于IF模式,FOS模式与B1模式的动态定位结果相近,主要原因是FOS模式中的大多数历元解算模式采用B1原始观测值。
动态测试结果的RMS统计值和模糊度固定率见表4,B1模式的动态定位结果最差,RMS值分别为2.61、3.29和 3.93 cm,其模糊度固定率约为72.8%。由于整个动态测试中基线长度大于10 km的时段约占70%,因此IF模式的精度整体优于B1模式,模糊度固定率为79.5%。FOS模式的模糊度固定率为89.7%,表明模糊度固定率和定位精度达到最高,相对于B1模式分别提高了11.1%、13.7%和17.0%,相对于IF方法提高了8.3%、10.7%和13.8%。因此,FOS方法能都采用最优的观测值,获得最优的模糊度固定率和动态定位结果。

表4 动态测试统计结果
3 结 语
本文提出了FOS方法,通过比较电离层延迟残差和测量噪声之间的关系,确定可靠的数据处理方法;此外,还分析评估了不同长度静态基线和中长动态基线的动态定位性能。
静态测试结果表明,FOS方法相对于B1方法,定位精度在E、N、U方向上分别提高了约9.6%、7.5%和11.4%,相对于IF方法,分别提高了8.6%、9.9%和12.2%。跑车动态试验结果表明,FOS方法可以实现最高的模糊度解算成功率和最佳的定位精度。相对于B1和IF方法,FOS方法的定位误差分别改善了约11.1%、13.7%、17.0%和8.3%、10.7%、13.8%,模糊度固定率提高了16.9%和10.2%。
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23
空间科学学报(2021年4期)2021-08-30
空间科学学报(2021年2期)2021-07-21
高技术通讯(2021年3期)2021-06-09
科学(2020年5期)2020-11-26
北京航空航天大学学报(2020年10期)2020-11-14
自动化学报(2019年6期)2019-07-23
雷达学报(2017年6期)2017-03-26
舰船电子对抗(2016年5期)2016-12-13
导航定位学报(2015年2期)2015-06-05