
无人机融入传统空域的空中碰撞风险研究
2023-10-09 09:15黄龙杨林嘉美霖李诚龙兰荣华
科技和产业 2023年16期
李 丹, 黄龙杨, 林嘉美霖, 李诚龙,3, 兰荣华
(1.中国民用航空飞行学院 空中交通管理学院, 四川 广汉 618307; 2.四川西南航空职业学院 空港管理学院, 成都 610401; 3.北京航空航天大学 电子信息工程学院, 北京 100191)
“十四五”期间,低空空域改革进程不断深化,低空的高度由1 000 m进一步拓展至3 000 m,这为无人机进入低空空域运行提供了有利条件。民航局也相继在四川、湖南、江西等地建立无人驾驶航空试验区进行先期探索,以此适应无人机进入传统有人机空域运行这一新需求。目前,在传统空域运行无人机系统,运营商须证明其操作是在可接受的安全水平内。随着无人机在机场终端区或在航路上运行的新场景出现,国内外学者的研究视角也逐渐由无人机的对地风险转至对空风险的评估。
Martin等[1]指出利用特定运行风险评估(specific operations risk assessment,SORA)方法,通过对交通密度、避撞功能的连续性等进行定性的规则集定义,将空中碰撞风险分为a、b、c、d四个等级以此评估无人机的空中碰撞风险。McFadyen和Martin[2]将有人机与无人机的实时监控数据、高度保持误差和成熟的碰撞建模方法相结合,研究了无人机在机场周围运行时的垂向碰撞率。Banerjee等[3]基于轨迹偏差概率、暴露面积和障碍物测量噪声等建立了无人机与障碍物的空中碰撞风险。欧洲航空安全局(European Aviation Safety Agency,EASA)的工作小组[4]也于2021年提出在评估早期,有必要缩小评估范围,将重点放在大众市场上的无人机上,现在是时候对中大型无人机与有人机之间的碰撞风险建立风险评估模型,并为此进行了空中风险的定性评估。在国内,陈亚青等[5]指出目前针对无人机的运行规章仍存在内容较笼统,缺乏强制执行效力和可操作性的问题,提出需逐步完善无人机的适航管理、安全管理等内容。陈义友等[6]指出无人机运行场景的策略制定和相关支撑技术均处于探讨和论证阶段,并基于多场景、多类型、多阶段等要素设计了民用无人机交通管理体系架构,以支撑无人机安全、高效的融入国家空域系统。韩鹏等[7]通过分析有人机与无人机的运行特点,计算了终端区场景下无人机与有人机的空中碰撞概率。励瑾等[8]融合城市低空因素,通过改进Reich模型建立基于位置误差的碰撞风险模型探究飞鸟与无人机之间的碰撞风险。
综上所述,现有成果对开展无人机融入传统空域的空中碰撞风险研究具有重要意义。但是,目前的研究对象大多集中在物流无人机,此场景的运行还远未达到融合运行的标准,而针对新场景下无人机运行的空中碰撞风险评估还较为少见,同时也缺少定量化、通用化、体系化的评估方法和流程。鉴于此,本文拟对无人机运行场景进行分类,将场景与风险模型相结合,提出未来对无人机空中碰撞风险的研究思路与方法,希望为无人机空中碰撞风险评估提供方法指导。
1 无人机空中碰撞风险研究现状
欧洲航空安全局(EASA)提出将无人机的运行分开放类、特定类和审定类进行风险评估[9],尤其对特定类无人机提出一种SORA的方法。其中对于空中碰撞风险的评估思路[10]可分定义运行概念(concept of operations,ConOps)、定义空中相遇等级、确定初始空中碰撞风险、使用缓解措施和确定最终空中碰撞风险5个步骤。
如图1所示,无人机运行场景[10]被分为X、Y、Z三类,在X型空域,需要降低与其他飞机相遇的可能性,事故责任由超视距运行(beyond visual line of sight,BVLOS)操作员承担,在Y型和Z型空域,必须进行操作申报和位置报告。结合运行要素和风险要素划分12类空中相遇场景,运行要素包括飞行规则、运行高度、机场环境、空域类型[管制空域/监视应答器强制区(transponder mandatory zone,TMZ)/农村/城市的非管制空域]和潜在人口等要素,风险要素包括有人机与无人机的接近率、几何形状及飞机动力学要素。与此同时,根据无人机与有人机间碰撞风险的可接受程度定义4级空中风险等级(air risk class,ARC),基于场景与空中相遇等级确定初始风险等级[10](图2),经过战略措施和战术措施的缓解确定最终空中碰撞风险。
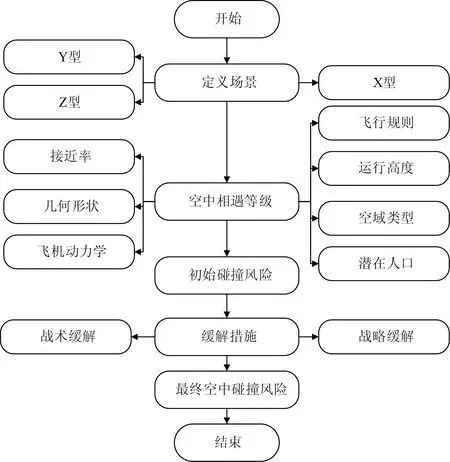
图1 空中碰撞风险评估流程
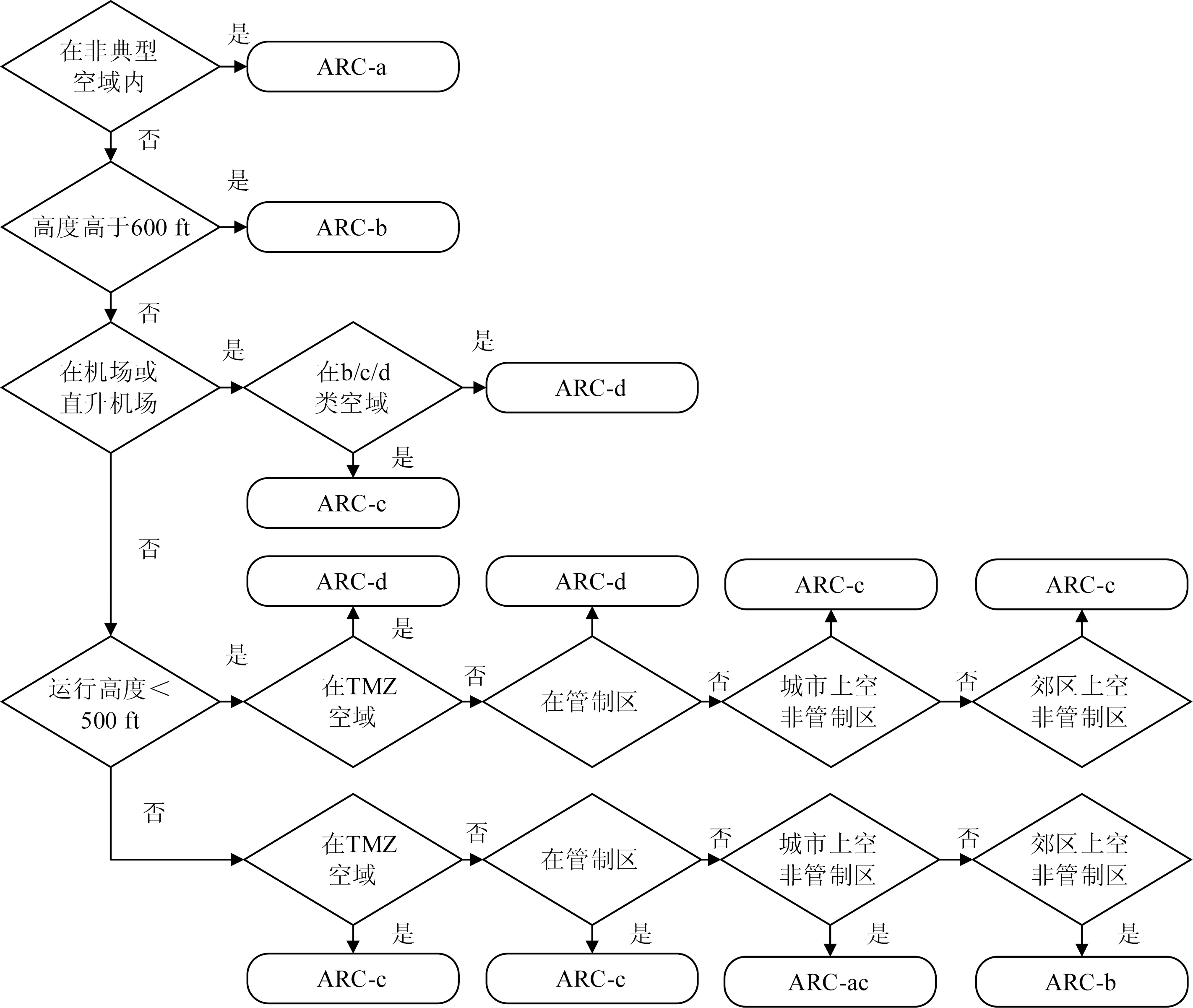
1 ft≈0.304 8 m
我国正参考EASA提出的SORA方法推进相关安全评估工作[11]。但目前,各国对无人机空中碰撞风险的研究还停留在定性分析的阶段,未能将空中碰撞风险的定量分析融入SORA的大框架之下。
对于空中相遇等级的定性分类与通过缓解措施降低风险的定性研究也减少了无人机进入传统有人机空域运行的可能性,而这方面问题也正是SORA下一个3.0版本拟解决的重点。
2 空中碰撞风险模型对比
定量化研究空中碰撞风险涉及碰撞风险模型的构建,是载人航空的一个长期研究领域。航空器的安全间隔可通过定量分析确定,并以此保证运行的安全性。对无人机空中碰撞概率的计算也可在合适的情况下参考有人机碰撞风险模型建立。在实践中,最成熟和最常用的模型分为3类:基于几何碰撞盒的模型、基于数据驱动的模型、基于模拟仿真的模型。
2.1 基于几何碰撞盒的模型
基于几何碰撞盒的模型通常会将飞机近似于一个规则的立体形状,如长方体、圆柱体、球体等几何体。一般会把其中一架飞机看作一个质点,并将忽略的体积转移到另一架飞机的体积膨胀中,以此定义碰撞区域和碰撞事件的发生。例如,经典的Reich模型[12]、Event模型[13]和gas 模型[14]就是典型的通过建立碰撞盒计算碰撞概率的方法。
2.2 基于数据驱动的模型
数据驱动的模型根据雷达检测到的交通数据进行分析,通过高斯分布、拉普拉斯分布等误差分布函数对风险进行建模,评估碰撞风险,提供决策支持。Anderson模型[15]、卷积模型[16]和基于概率公式推导的模型[17]是其中的典型代表。
2.3 基于模拟仿真的模型
此类模型利用蒙特卡洛等多种仿真方法对飞机的轨迹或误差进行计算机模拟,产生大量数据,通过修改空域环境、设备性能等可自由模拟各类场景,应用非常灵活。Maki等[18]利用仿真的无人机轨迹进行高斯概率分布,有效地估计了近半空碰撞的概率。Wang等[19]基于无人机三维飞行动力学的蒙特卡罗仿真方法,在无人机飞行能力的约束下生成大量随机样本计算不同场景下各时间段的碰撞概率。
综上所述,各类碰撞模型的优劣及适用范围如表1所示。

表1 各类碰撞风险模型对比
3 无人机运行场景描述
实施面向运行场景的风险评估方法是民航局对无人机风险管理[20]的基本策略之一,无人机(unnamed aerial rehicles, UAV)的空中碰撞风险因其自身装备不一、性能各异、运行环境不同而变化,理清无人机融入传统空域的各类运行场景(表2)有助于开展无人机空中碰撞风险的分类研究。
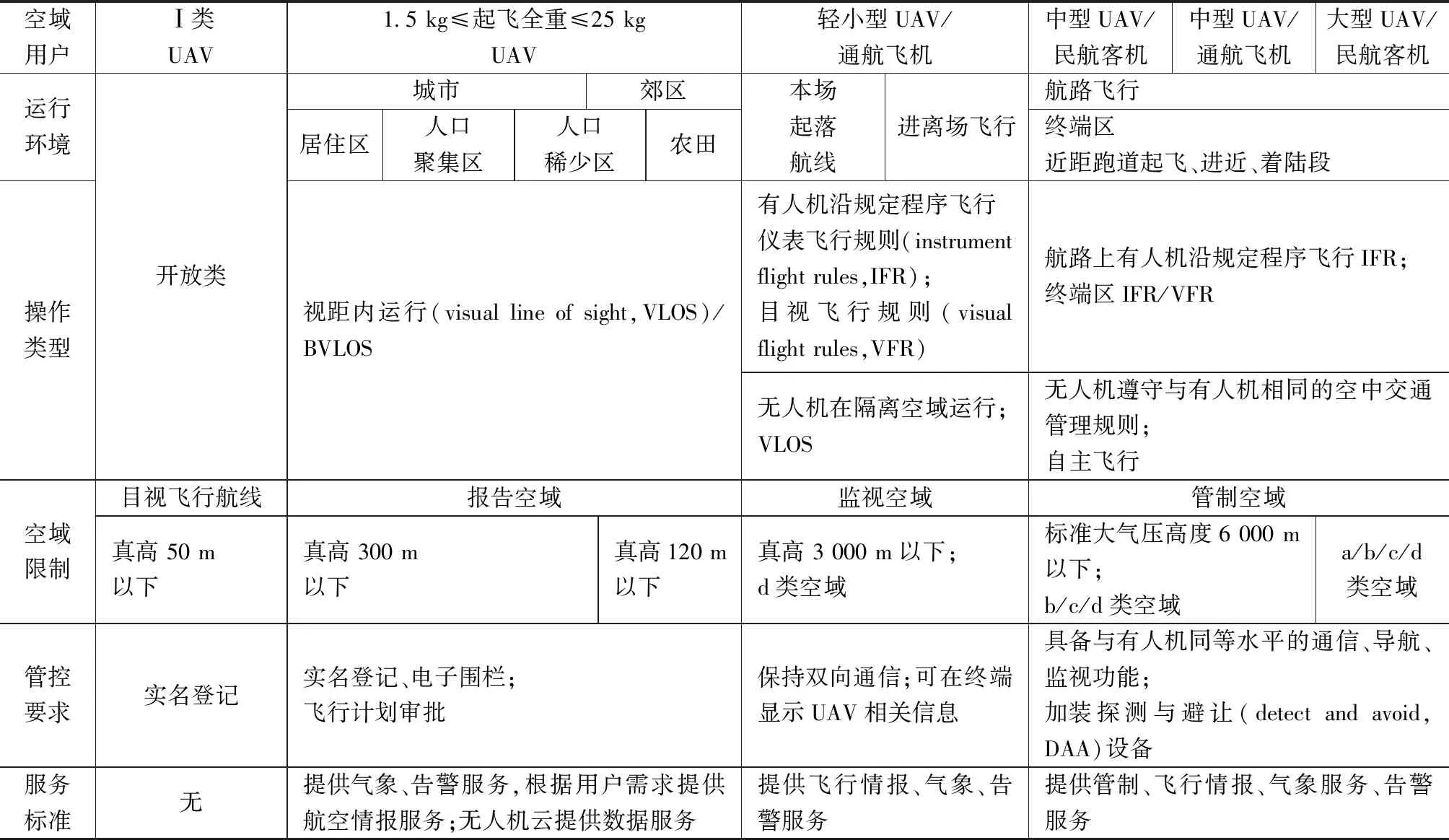
表2 无人机融入传统空域的运行场景
4 未来研究的思考与建议
通过对碰撞模型的对比与无人机运行场景的分类,发现起飞全重在25 kg(含)以下、运行高度在300 m以下的无人机在非管制空域运行时,与有人机相撞的可能性较低。因此,未来无人机融入传统空域的空中碰撞风险的定量研究主要从以下几方面展开。
4.1 轻小型无人机与有人机在终端区运行
在终端区的轻小型无人机通常在隔离空域内运行,其轨迹随任务类型多变,而有人机则按照规定程序执行进离场飞行或起落航线飞行。此时,两者相对位置不能单纯地总结为平行航路或交叉航路。因此,此类运行适合采用基于数据驱动的模型探讨碰撞概率的大小。
在此应用模型时,可先估计隔离空域上空有人机空间位置的概率分布;其次,对无人机行为适当近似,使用统计分析来估计有人机与无人机在运行空间的重叠概率;再将有人机的时间特征与空间重叠概率相结合;最后使用无人机任务持续时间及对最坏情况的假设来估计跨越隔离空域上空的碰撞风险。此方法可充分利用现有可用交通数据,对无人机的完整性、机密性和可用性进行基于概率的评估,而且可考虑到环境的随机性,从而更精确地计算碰撞概率。
4.2 中大型无人机与有人机在航路运行
中大型无人机在航路上运行需遵守与有人机同样的飞行规则,配备符合要求的通信导航监视等设备。此时,无人机与有人机的轨迹都比较固定,可将无人机视为有人机考虑,这类运行可采用基于几何碰撞盒的模型探讨其碰撞概率。
此类模型应用时间久且简单方便,对此类场景可建立有人机与无人机的碰撞盒,分平行航路与交叉航路进行探讨,还可将人为因素、环境因素、缓解措施等纳入模型中改进模型,使预测结果更加准确可靠。
4.3 中大型无人机与有人机在终端区运行
中大型无人机在近距跑道起飞、进近、着陆过程中可能与有人机的运行产生冲突,同时也存在有人机误入无人机跑道的情况,严重影响飞行安全。对此类运行可采用基于仿真模拟的模型评估风险。
基于蒙特卡洛等仿真方法可建立无人机的3D运动模型[21],分析无人机沿指定路径运动时的轨迹,通过设置无人机导航、监视、通信设备性能,增加时间长度和交通密度,可自由模拟空域环境,以此评估中大型无人机在终端区造成的碰撞风险。此方法还可根据模拟效果优化空域的进离场及起落航线程序设计,进一步降低碰撞风险概率。
5 结语
无人机融入有人机空域运行已对传统空域提出了一系列安全挑战,由此引发的诸如空域需精细化分类、风险需分等级评估、管理需灵活适应市场等问题亟待解决。目前各国对无人机融入有人机空域运行的碰撞风险研究还存在以下问题:①囿于无人机的增速与市场占有率,为解决主要矛盾,风险研究呈现场景单一、对象单一且多集中在对地风险这些现象,对空风险的研究相对滞后;②各国普遍采纳的SORA方法中,对空中相遇等级的划分并不适用于我国现状,部分场景无法通过其流程对初始风险定级;③对空中碰撞风险停留在定性分析的层面,欠缺定量研究,难以用数据支撑风险评估的可靠性。
对此,在分析EASA对空中碰撞风险的研究基础上,对我国无人机运行场景进行全面归类,该场景分类旨在梳理各类无人机的特点,明确各场景下研究的主要对象和主要风险来源,完善现有SORA框架体系,解决无人机多场景运行的空中碰撞风险评估未量化、不全面的问题。
传统有人机的碰撞风险模型研究已渐成体系,无人机的空中碰撞风险还未分类、分级、分场景构建定量评估体系,也未明晰研究方法的适用性。因此,结合场景分类与成熟碰撞模型,无人机融入传统空域的空中碰撞风险研究可以从3个方面开展:①轻小型无人机与有人机在终端区运行可采用基于数据驱动的模型分析;②中大型无人机与有人机在航路运行可采用基于几何碰撞盒的模型分析;③中大型无人机与有人机在终端区运行可采用基于仿真模拟的模型分析。后续的研究还需将人为因素、缓解措施和管理因素等纳入模型,建立更适合无人机运行的碰撞风险模型,用以支撑无人机融入传统空域的实践活动。
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
科技创新与应用(2021年24期)2021-09-08
军民两用技术与产品(2021年10期)2021-03-16
消费导刊(2019年12期)2019-08-21
哈尔滨商业大学学报(自然科学版)(2016年4期)2016-09-02
西南交通大学学报(2016年4期)2016-06-15
海峡科技与产业(2016年3期)2016-05-17
中国农业文摘-农业工程(2016年5期)2016-04-12
海军航空大学学报(2015年3期)2015-11-11
中学历史教学(2015年11期)2015-11-11
