
基于十字梁结构的六维力/力矩传感器全方位机械过载保护研究*
2023-10-08 06:55马雪莉曹会彬王大庆孙玉香
传感技术学报 2023年8期
董 翔,马雪莉,曹会彬,江 曼,王大庆,孙玉香*
(1.安徽大学电气工程与自动化学院,安徽;2.中国科学院合肥物质科学研究院,安徽 合肥 230000)
六维力/力矩传感器可同时测量三维力和三维力矩信息[1],是空间机械臂智能化的关键部件之一,安装在空间机械臂上的六维力/力矩传感器随航天器发射进入太空的过程中,面临剧烈的振动与冲击,缺乏过载保护的六维力/力矩传感器弹性体[2]结构可能遭到破坏结构而失去测量功能。 为了保证六维力/力矩传感器在空间环境使用的可靠性[3],需要对六维力/力矩传感器进行过载保护研究。
现阶段的过载保护方式可分为机械式和非机械式[4-5],非机械式过载保护指的是事先设置好传感器的过载阈值,然后利用软件程序等检测传感器受到的载荷是否超过此阈值,如果超过此阈值,程序会发出报警信息,通过自动控制或人工操作的方式,阻止外界进一步对传感器施加载荷,从而达到过载保护的目的;机械式过载保护即根据弹性体的形变特点设置一负载阈值,当传感器的负载超过此阈值时,传感器上的某一过载限位结构开始起承担负载的作用,阻止传感器弹性体不再受到更大的载荷,避免产生进一步的变形。 非机械式过载保护高效、便捷、易于集成,但是在硬件结构上缺乏有效的保护,并不适用于外部载荷不受控制的场合。 由于航天器发射阶段的振动具有一定的不可控性,采用机械过载保护的方法更合适空间机械臂上的六维力/力矩传感器。
典型的机械式过载保护有平行梁式、轮辐式和S 型等[6]。 2005 年,中科院上海微系统与信息技术研究所[7]针对高冲击加速度传感器设计了一种曲面贴合过载保护机构,虽实现较高的动态特性,但不适用于力/力矩传感器;2008 年,哈尔滨工业大学[8]研制出一种提供转矩和弯矩过载保护的力矩传感器,提高了系统的安全性,但是在方向力上缺乏有效的保护;2011 年,揣荣岩等[9]针对高灵敏压力传感器,通过改变牺牲层厚度的方法将其过载能力提升至180%~200%,而此程度的过载倍数并不适用于更加恶劣的使用环境;2016 年,Weng 等[10]设计带有保护销的安装法兰和间隙孔结构来限制六轴力/力矩传感器的运动,实现传感器的过载保护;2018年,Abe 等[11]提出了一种自身具有过载能力的h 缝式平行梁结构力传感器,并证明其实用性;2021 年,深圳市鑫精诚科技有限公司[12]利用环形盖板、弹性体、电缆线安装座和底座组成一种自带过载保护的六维力传感器结构,除具有过载保护的能力,此结构还兼顾装配便捷、结构简单和易于加工的优点;同年,重庆创和德声科技有限公司[13]针对应变式传感器利用蝶形弹簧设计了一种过载保护机构。
综合上述研究成果可以发现,现阶段传感器机械过载保护机构在过载维度和过载能力上与空间环境期望的全方位、高过载倍数和过载保护方式上有一定的差距,并不适用于空间环境的六维力/力矩传感器,因此,本文根据空间环境六维力/力矩传感器的使用特点,设计一种勾合式的全方位机械过载保护机构,并将其应用在十字梁结构的六维力/力矩传感器上,对其过载保护能力进行仿真验证。
1 过载保护机理分析
本次研究模型为带有浮动梁的十字梁型六维力/力矩传感器[14],具体结构如图1 所示,1 为浮动梁,起到支撑和分散应力的作用,共四根浮动梁;2为弹性梁,是主要产生变形和检测应变的结构;3 为外圆环,是该传感器的主体形状;4 为中间圆台,圆形结构的接触面更圆滑,减少应力集中现象;图中字母a、b、c表示分别表示弹性梁的宽、高、长,字母d、e、f分别表示浮动梁高、长、宽,字母r表示中间圆台的半径。 此十字梁型传感器可同时检测到六维力/力矩,即:Fx、Fy、Fz、Mx、My、Mz,由于此结构关于X轴和Y轴对称,加载Fx、Fy方向力时传感器的变形具有对称性,故只分析Fx的变形即可,对于Mx、My,同理只分析Mx即可,故可简化为四方向上的力,即:Fx、Fz、Mx、Mz。

图1 十字梁型六维力/力矩传感器结构
为描述变形情况,将各梁分别命名,如图2(a)所示,四根弹性梁分别命名为A、B、C、D,与之对应的浮动梁为A*、B*、C*、D*,固定外圆环的底部,在中间圆台上施加加载力,图2(a)所示为加载Fx时传感器的变形情况,可知弹性梁A、C和浮动梁B*、D*发生弯曲变形,而弹性梁B、D和浮动梁A*、C*变形微小,分析可知传感器沿x轴发生一定的位移,故要在外圆环的外侧面设计过载保护机构,阻止传感器进一步沿x轴变形。 图2(b)所示为加载Fz时传感器的变形情况,可知弹性梁A、B、C、D发生弯曲变形,可简化成悬臂梁,四根浮动梁发生弯曲和扭转变形,可看成四个弹性支座,总的变形位移为两类梁的变形总和。 四根弹性梁的弯曲变形,使得与之相连接的圆台沿z轴移动一段距离,故可阻止圆台发生过大的位移,进而保护弹性梁。 图2(c)所示为加载Mz时传感器的变形情况,所有梁发生弯曲变形,每一对的变形结果一致,浮动梁的变形较小,可忽略不计。 弹性梁的变形带动圆台绕z轴旋转一角度,为防止弹性梁被破坏,应在圆台旋转方向设计过载保护机构。 图2(d)所示为加载Mx时传感器的变形情况,弹性梁A、C发生弯曲变形,对应的浮动梁变形微小,可忽略不计,弹性梁B、D发生扭转变形,圆形平台绕x轴发生一定角度的旋转,弹性梁A、C与浮动梁A*、C*的接触点可简化为滚柱支座。 对此情形,应使设计的过载保护机构阻止圆形平台绕x轴过度旋转。

图2 加载各维力时变形情况
2 过载保护间隙解析
如图3 所示,根据传感器的结构受载变形特点,本文设计了一款勾合式六维力/力矩传感器全方位机械过载保护机构,由三部分组成勾合式结构,利用间隙Δ1、Δ2和Δ3实现过载保护的功能。Δ1用于Fz、Mx、My方向的过载保护,Δ2用于对Mz方向的过载保护,Δ3用于Fx、Fy、Mx、My方向的过载保护。 如图4 所示,当各维力加载时传感器与保护机构的随动关系可由端盖的运动简单表示出来,也可由此表示出过载保护机构的关键尺寸Δ1、Δ2和Δ3。
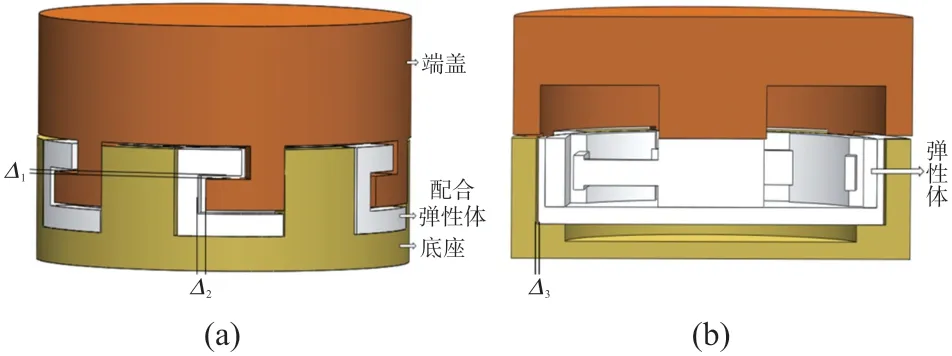
图3 过载间隙Δ1、Δ2、Δ3
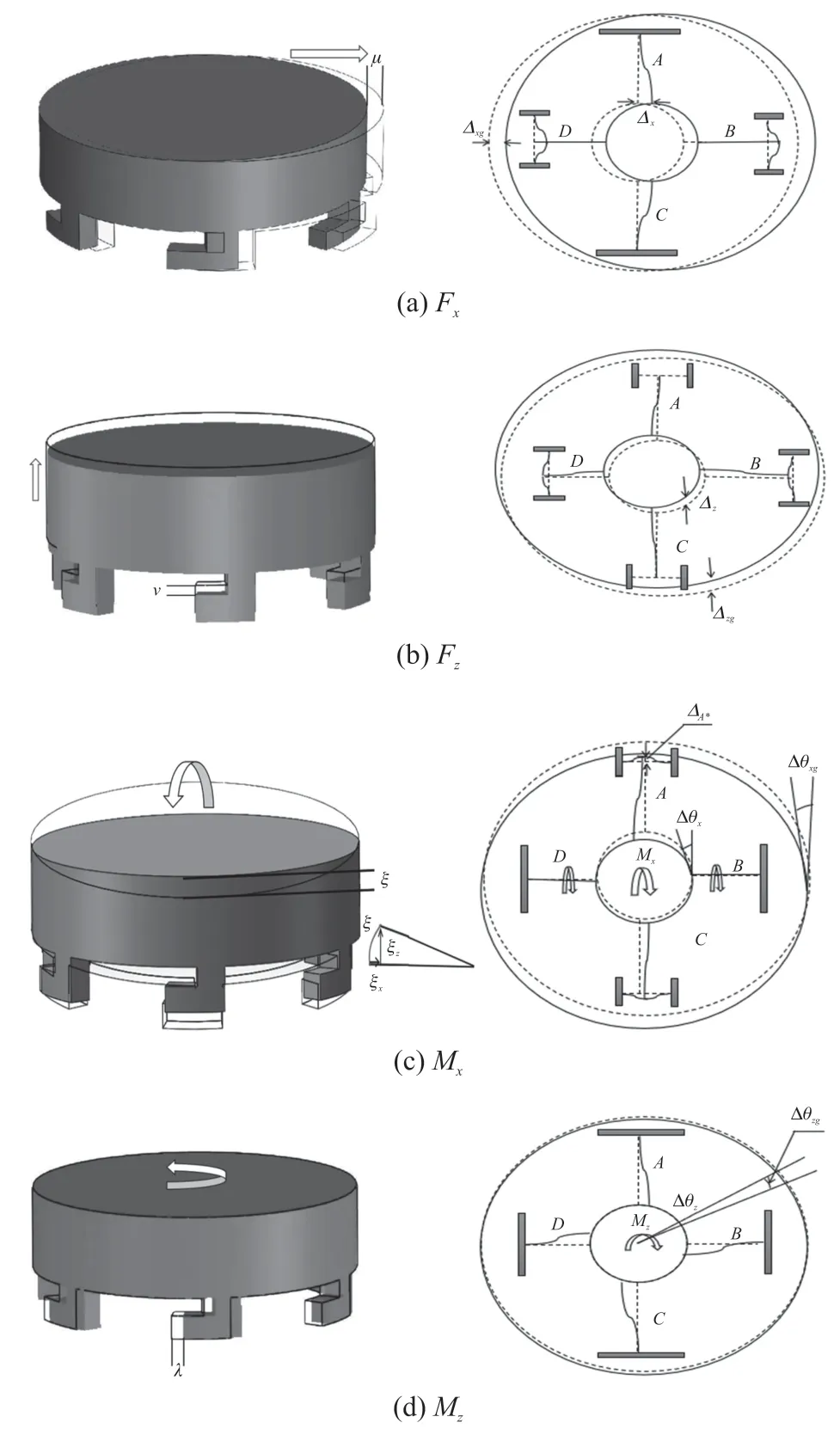
图4 加载各维力时过载机构位置变化
如图4(a)所示,当Fx加载时,梁A、C、B*、D*沿x轴移动位移Δx,文献[15]中有类似推导,其中Δx为:
式中:FAX为A梁的剪力,S为面积符号,I为惯性积,E为弹性模量,G为剪切模量,k为梁截面剪切形状系数。 由图可知与之相连的过载机构移动相同的位移Δxg,即:
如图4(b)所示,当Fz方向力加载在传感器时,A、B、C、D梁与中间圆台分别沿Z轴移动相同的位移ΔZ[15],浮动梁A*、B*、C*、D*发生弯曲变形时也会移动一段距离,相对ΔZ较小,故设计过载机构时只考虑ΔZ的值:
根据结构的随动关系,外部加载机构沿z轴移动ν,且ν与ΔZ相等,即:
如图4(c)所示,当Mx加载时,梁B、D和中间圆台绕x轴旋转Δθx[15],梁A、C发生弯曲变形,且位移为绕x轴的一段圆弧,浮动梁A*、C*的位移记为ΔA*,故Δθx的大小为:
P为A梁的剪力,取过载保护机构的半径为R,则圆弧的大小ξ为:
由于角度Δθx较小可看成一段直线,将ξ分解可得端盖在Z轴和X轴分别移动距离ξz=ξcos Δθx和ξx=ξsin Δθx;
如图4(d)所示,当Mz加载时,A、B、C、D梁在x-y平面移动一段距离,中间圆台旋转Δθz[15]:
对于过载保护机构,随中间圆台绕z轴旋转λ,且Δθz=λ,位移为绕z轴的一段圆弧。
综上,关键尺寸Δ1=[ξzν],Δ2=λ,Δ3=[ξx μ]。
本研究所用传感器的尺寸如表1 所示,材料为铝合金,弹性模量E为70 GPa,剪切模量为27 GPa,泊松比为0.33,各方向的量程Fx=100 N、Fz=200 N、Mx=2 N·m、Mz=4 N·m。 现取三倍量程的过载力/力矩,将具体结构代入,在不影响正常测量的原则以及实际操作性情况下,可得关键尺寸Δ1=0.09,Δ2=0.13°,Δ3=0.03。

表1 传感器尺寸表 单位:mm
3 仿真分析
3.1 十字梁型六维力/力矩传感器有限元分析
屈服应力是材料的一个固有属性,定义为金属材料发生屈服现象时的屈服极限。 铝合金的屈服应力为280 MPa,而在实际应用中,一般取安全系数1.2,即加载应力不大于233 MPa。 在未配置过载机构时对六维力/力矩传感器进行应力分析,如表2 所示,当Fx/Fy、Fz、Mx/My、Mz的加载力分别设置为20倍量程时,应力水平均已大于233 MPa,说明此时六维力/力矩传感器已发生不可逆的塑性变形,在实际使用中是不允许的。 为验证设计的过载保护机构的性能,下面对装有过载保护机构的六维力/力矩传感器进行仿真分析[16]。

表2 加载力为20 倍量程时传感器的应力值(未加过载)
3.2 加过载的十字梁型六维力/力矩传感器有限元分析
在SOLIDWORKS®中将各个零件配合成完整的装配体,端盖的中间圆台和弹性体的中间圆台取配合“同心”,弹性体底面圆与底座的上表面取配合“重合1”,配合弹性体的外径圆与底座的外径圆取配合“重合2”,至此各零件组成带有全方位过载保护的六维力/力矩传感器。
六维力/力矩传感器材料为铝合金,而过载保护机构选取刚度大于铝合金的结构钢,便于更好发挥该过载机构的性能。 另外,确定该过载机构的内径应考虑以下两个因素,一是该六维力/力矩传感器为应用到机械臂上的零件,因此确定内径时应综合考虑机械臂的尺寸,二是六维力/力矩传感器在受到力/力矩作用时,过载间隙的大小与内径呈线性关系,若间隙过小,在结构实现上会存在困难,所以过载保护机构的内径要适当增大。
将装配体模型导入仿真软件,设置六维力/力矩传感器的材料为铝合金,而过载保护机构的材料设置成较硬的结构钢,采用自动方法对过载机构进行网格划分,弹性体部分采用六面体主导法划分弹性体的网格。 在受不同的力/力矩作用时模型会产生不同方向的运动,因此要正确地设置接触类型,一般接触类型分为:绑定、无分离、无摩擦的、粗糙的以及有摩擦,根据符合实际的运动情况设定各个面的接触类型。 为了清晰直观地反映六维力/力矩传感器贴片位置的应变情况,将“范围”中的“几何结构”选为对应贴片位置的网格。
在过载保护机构以及六维力/力矩传感器不被破坏的范围内,最终选取Fx/Fy、Fz、Mx/My、Mz分别为2 000 N、4 000 N、26 N·m、80 N·m 的力/力矩进行仿真分析。 图5(a)、图5(b)所示为应变随各维加载力/力矩的变化曲线,曲线以两段不同的斜率持续增加;图6(a)、图6(b)所示为应力随各维加载力/力矩的变化曲线,与应变变化趋势一致。 在斜率变化点之前为施加3 倍量程力/力矩时应力与应变的变化趋势,由图可知,该传感器工作良好;当分别在Fx/Fy、Fz、Mx/My、Mz方向加载2 000 N、4 000 N、26 N·m、80 N·m 的力/力矩时,贴片处的应力值分别达到139.7 MPa、196.4 MPa、45.4 MPa、38.0 MPa,均小于铝合金材料的屈服应力值,传感器未遭到破坏,说明该过载保护机构在各方向上可达到20、20、13、20 倍的过载能力。

图5 加载各维力时应变曲线(加过载)

图6 加载各维力时应力曲线(加过载)
对于各方向应变片贴片位置处应变及应力变化趋势,有以下三处说明:①斜率由陡变缓。 随着力不断加载,过载间隙逐渐减小直至减为零,过载间隙大于零时,应力与应变按一定斜率变化,此时过载机构未影响六维力/力矩传感器的变形;当过载间隙减至零,斜率变缓,过载机构发生作用,由于过载机构并非绝对刚体,应力与应变会发生微小变化;②斜率变化处力/力矩的数值大于该六维力传感器量程,说明过载机构不会影响正常测量,即在进行有效保护的前提下该六维力/力矩传感器可正常使用;③由于过载保护机构由结构钢制成,在随加载力/力矩不断增加的过程中会产生变形,所以仿真时应限制过载机构的应力在其许用应力范围内,保证过载机构不被破坏。
4 总结
本文以提高空间六维力/力矩传感器过载保护性能为出发点,通过对十字梁结构的六维力/力矩传感器进行受力变形特征分析,设计了一款勾合式的全方位机械过载保护机构;通过数学解析的方法分析了各维机械过载保护间隙,并运用数值仿真的方法模拟装有过载保护机构的十字梁结构的六维力/力矩传感器的受力表现,仿真结果表明:该过载保护机构可使六维力/力矩传感器在Fx/Fy、Fz、Mx/My、Mz分别达到20、20、13、20 倍的过载能力,大大提高了其过载性能,并且在传感器的量程范围内不影响其正常测量,实现了六维力/力矩传感器的全方位高过载保护。
猜你喜欢
船舶标准化工程师(2023年2期)2023-09-30
弹性体(2021年6期)2021-02-14
中国外汇(2019年19期)2019-11-26
制造技术与机床(2018年11期)2018-11-23
卫星电视与宽带多媒体(2018年2期)2018-06-27
制造技术与机床(2017年9期)2017-11-27
材料科学与工程学报(2016年1期)2017-01-15
系统工程与电子技术(2016年7期)2016-08-21
橡胶工业(2015年3期)2015-07-29
浙江林业(2015年6期)2015-02-24
