基于水下精细探测技术的水下滑坡监测方法研究
2023-10-07 02:29魏荣灏祝世华龚令平
浙江水利科技 2023年5期
魏荣灏,祝世华,徐 达,龚令平
(1.浙江省水利河口研究院(浙江省海洋规划设计研究院),浙江 杭州 310017;2.浙江省水利水电工程管理协会,浙江 杭州 310020;3.浙江省河口海岸重点实验室,浙江 杭州 310017;4.衢州市信安湖管理中心,浙江 衢州 324000)
0 引 言
海塘和河道护堤作为重要的堤防工程,在抵御潮水侵蚀和保护沿线人民生产生活安全方面发挥着重要的作用。堤防工程在受到内外作用力,如水蚀等作用下,容易产生滑坡。当前,滑坡灾害成为全球范围内发生频率最高、分布最广、造成损失最重的自然灾害之一,严重威胁着人类的生命财产和重大工程设施安全[1],因此滑坡监测一直是国内外研究的热点;但当前的研究主要集中于陆域边坡的监测和分析[2-5],对水下边坡滑坡的研究较少[6-7]。同时,水下滑坡一般难以通过人工目视巡堤检查,常在水下基础垮塌并导致岸堤部分失稳后才能发现,具有较大的危害。综上所述,研究水下滑坡监测技术,有助于定期对堤防工程的水下部分进行观测并处置可能的失稳区域。本文主要采用船载多波束测深系统和无人遥控潜水器(ROV)平台,研究基于水下精细探测技术的水下滑坡监测方法,并对滑坡体进行简单的定量分析。
1 水下滑坡监测技术
水下滑坡监测主要基于水下精细探测技术,结合船载多波束测深系统和基于ROV的水下光学观测技术。本节主要介绍水下精细探测技术组成和水下滑坡监测方法。
1.1 水下精细探测技术
水下探测的主要手段有声学、光学和重磁学等。声学观测仍是当前水下探测使用的主要技术,常用的仪器设备有多波束测深系统、侧扫声呐系统、浅地层剖面系统和ADCP等;光学观测作为一种重要的辅助手段,可通过水下激光扫描和可见光成像等技术提供非常直观的探测结果;海洋重力和磁力探测技术可获取大量的物理场信息。
随着科学技术和加工工艺的不断进步,以第五代多波束测深系统为代表的高分辨率、高精度监测技术解决了传统多波束声呐成像分辨率低,难以精细、清晰反映观测物体现状的问题,在融合测深声呐、三维图像声呐和组合导航等多种技术后,逐步形成水下精细探测技术,并应用于海底管道监测、桥梁局部冲刷观测和水下滑坡监测等多个领域。
水下精细探测技术可获取水面、水体和水底的多种数据,包括:ADCP获取水体的流速流向,多波束测深系统获取水底的地形,侧扫声呐获取水底的地貌及障碍物分布,浅地层剖面仪和单(多)道地震仪获取水底的地层分布,三维图像声呐和水下三维激光扫描仪获取涉水构筑物的水下精细结构信息,光学摄像头获取光学影像,海洋重力仪和磁力仪分别获取重、磁数据。通过多源数据融合可获取探测区域的详细信息,为了解探测区域现状和后续开发利用等提供全方位的数据支撑。
1.2 水下滑坡监测方法
水下滑坡发生后,需要掌握滑坡范围,同时定位崩塌块体,了解崩塌块体的分布和状态,为后续的滑坡修复工作提供基础地理信息数据。常规的人工岸堤巡视仅能检查陆域部分;单波束测深技术则仅能获取断面的局部数据,难以获取崩塌块体的详实信息;侧扫声呐虽能获取水下护坡的高分辨率声图数据,但二维声图在准确量取崩塌块体高度时存在一定困难。以Sonic 2024为代表的第五代多波束测深系统[8],具有1 024个波束点、60 kHz高带宽、170~450 kHz可变声波频率、10°~160°可旋转可变观测角度等特征,可对指定区域进行高密度、高精度、高分辨率、全覆盖观测,获取滑坡区域的精细结构及地形数据。同时,采用ROV搭载的光学摄像头和三维图像声呐等多种传感器可对崩塌块体进行详细观测,获取高清影像和可量测三维点云数据,解决传统蛙人探摸存在较大安全隐患和无法精确定量描述滑坡尺寸等问题。
2 实际监测案例
由于台风过境,某河道受上游水库泄洪影响水位暴涨。在巡视中发现,护堤经大流量洪水冲刷后,部分岸堤已经出现垮塌现象,需要确认水下堤防的现状信息,探明是否存在崩塌以及水下滑坡的范围,为应急抢险和后续长效治理提供基础地理信息数据。
2.1 监测流程
水下滑坡监测主要采用船载多波束测深系统和基于ROV平台的水下光学摄像、三维图像声呐。校核控制成果后,首先,在船舶上安装多波束测深系统,沿河道对护坡两侧水下区域进行全覆盖地形测量,对数据进行准实时处理后快速查明疑似水下滑坡区域并明确滑坡范围等信息。其次,采用搭载光学成像系统和三维图像声呐的ROV对初步探明的水下滑坡区域进行详细探测,根据水体清澈度和后续整治工作的需要,确定采用光学(声学)精细监测方法获取崩塌区域信息。最后,分析获取数据,明确水下滑坡的具体位置,计算滑坡面积、滑坡块体尺寸等边坡整治工作所需的信息。监测流程见图1。
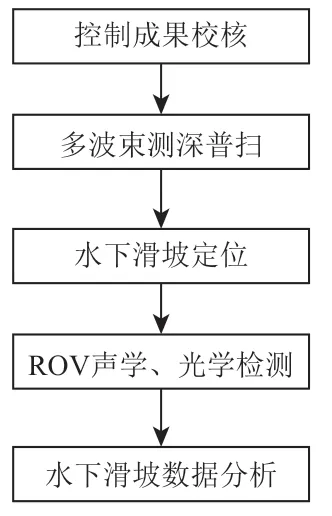
图1 监测流程图
2.2 数据采集
2.2.1 多波束测深
本次监测采用Sonic 2024多波束测深系统结合Applanix POS MV组合导航系统。测量前对多波束测深系统进行校准,校准分为2个部分:①校准组合导航系统的GNSS天线与IMU之间的相对位置关系;②校准组合导航系统与多波束测深系统之间的相对姿态关系,即常见的横摇、纵摇和艏向的安装偏差。由于组合导航系统与多波束测深声呐之间采用1PPS(Pulse Per Second,秒脉冲)系统进行时间同步,因此无需进行时延校准工作。所有校准工作完成后,可以沿河道两侧对水下护坡进行扫测。扫测时选用UHD(Ultra High Definition,超高清)模式,并根据水质实际情况选取可用范围内的最高声学频率以获取高分辨率的数据。同时由于护坡附近水深一般较浅,表面声速与水体中的声速存在较大的区别,如果按照常规的1 h间隔进行采样,可能会由于声速改正不足导致出现“笑脸”或者“哭脸”的问题,需要增加声速剖面采样频次。
2.2.2 基于ROV的监测
ROV作为一个良好的水下观测平台,可以搭载诸如光学摄像头、三维图像声呐、水下激光扫描仪和超短基线等多种传感器对水下物体进行定量、定性分析。在水下滑坡监测中,根据前期多种数据源的分析结果选取重点区域,采用ROV进行详细勘察。本次监测根据多波束测深数据,对滑坡区域使用搭载光学摄像头的ROV进行勘察,确定滑坡块体的形态(见图2)。

图2 崩塌护坡图
2.3 数据处理
由于ROV平台仅采集了影像数据,故主要对多波束测深数据进行处理。基于CARIS HIPS &SIPS软件的数据处理流程如下:首先新建一个船文件,然后依次导入各种测量数据,如多波束原始观测数据、声速剖面数据、位置姿态数据和涌浪数据等,再根据校准测线求解横摇、纵摇和艏向的安装偏差参数,更新船文件,重新合并计算所有的测线文件后进行滤波,并根据水下滑坡的监测需要输出对应成果。
2.4 数据分析
经过本次监测,发现该河道共存在水下滑坡区域2处,其中1处见图3。监测结果可以清晰反映该处滑坡的形态特征:滑坡长度约51.0 m,面积510 m2,护坡部分断裂,其中1块长约4.9 m,宽约4.2 m。分析处理后的数据可知,该处水下边坡失稳的原因可能是河道底部泥沙被大流量的洪流带动,导致护堤底部基础受到侵蚀后承载力不足。
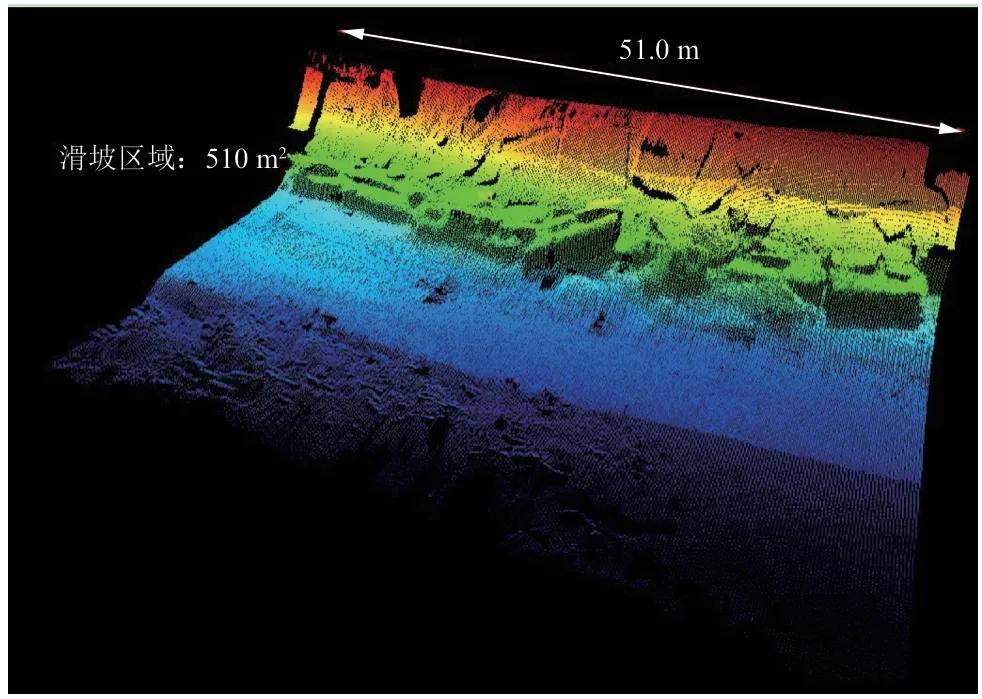
图3 滑坡形态特征图
3 结 论
水下滑坡是堤防工程的重要危害之一。受水体影响,水下结构现状难以采用日常人工目视巡检的方法,因此有必要研究快速、方便、高精度的监测方法。本文主要对一种基于水下精细探测技术的水下滑坡监测方法进行研究,实际案例中采用船载多波束测深系统进行大范围滑坡监测,对滑坡区域使用搭载光学摄像头的ROV获取崩塌区域的影像成果,可输出包括水下地形图、水下高分辨率三维点云数据、水下高清视频和照片等多种成果。观测数据经后处理能清晰详实地反映水下滑坡范围、滑坡块体的体积等各种属性信息,为后续的修复整治工作提供强大的地理信息数据支撑。同时该监测方式可用于堤防工程的水下结构日常监测,为水下边坡稳定性分析提供基础数据,具有较广的应用前景。
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
水运工程(2020年11期)2020-11-27
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
通信技术(2019年3期)2019-05-31
电子测试(2018年6期)2018-05-09
声学与电子工程(2017年1期)2017-06-22
上海金属(2015年3期)2015-11-29
中国科技信息(2015年21期)2015-11-07
四川师范大学学报(自然科学版)(2015年4期)2015-02-28