控压钻井的控制理论研究与装备研发进展
2023-10-05 19:23尹士轩徐宝昌孟卓然陈贻祺
化工自动化及仪表 2023年5期
关键词:智能化
尹士轩 徐宝昌 孟卓然 陈贻祺


摘 要 首先,介绍了控压钻井(Managed Pressure Drilling,MPD)技术,系统分析了MPD理论的国内外研究现状,重点探讨井筒环空压力控制方法(从经典PID算法到先进控制算法,再到引入智能化思想)的发展过程,同时阐述了MPD参数估计方法的研究现状;其次,介绍了国内外控压钻井装备及技术现状,特别指明了我国现有装备的制造水平;最后,指出了MPD技术值得深入研究的关键问题。
关键词 控压钻井 井筒环空压力 先进控制 智能化 装备研发
中图分类号 TE249 文献标志码 A 文章编号 1000-3932(2023)05-0622-10
基金项目:国家重点研发计划项目(2019YFA0708304)。
钻井是石油开采过程中最重要的流程之一,是油气勘探开发的重要手段。在全球油气勘探过程中,浅层油气资源的开发已经达到峰值水平,开采重心逐渐聚焦在深部复杂地层的油气藏[1],而深层、超深层和特深层的复杂极端环境(温压高、窗口窄、盐层厚)使得常规技术手段难以满足安全与高效钻进的需求,易出现“溢漏塌卡”等影响井筒稳定的共性难题,严重制约深层油气的勘探开发[2]。因此,确保钻井安全是现阶段保障油气规模持续上产、长期稳产的首要问题。
控压钻井(Managed Pressure Drilling,MPD)技术与装备的攻关促使我国石油工程服务技术向高端化、原始创新化转变。MPD作为有效处理复杂地质环境、快速提升钻井安全的工艺技术之一,迅速成为了新一代石油服务技术与装备的研究热点[3]。目前,在渤海湾、塔里木山前及柴达木探区等深部复杂地层的钻井实践中已经证实,MPD具有有效缩短非生产时间、显著改善生产效率及保护储层等优势。笔者围绕MPD技术的控制理论研究与装备研发展开,重点分析了MPD井筒环空压力控制方法和参数估计问题的国内外研究现状,详细介绍了国内外MPD技术与装备的发展动态,最后结合发展现状,指出了MPD技术值得深入研究的关键问题。
1 MPD概述
1.1 MPD定义
2005年国际钻井承包商协会(International Association of Drilling Contractors,IADC)做出如下定义:MPD通过可调压力的环空上返泥浆系统和旋转控制装置共同作用,精確控制井筒压力,达到减少非钻进时间以及减少钻井事故的目
的[4]。2009年,AGR公司将MPD技术进行了重新定义:MPD技术是一种能够精确控制井筒中环空压力剖面的自适应钻井程序,它可以保证井底压力环境和压力剖面的一致[5]。
事实上,MPD技术是基于常规钻井与欠平衡钻井技术发展起来的一种先进钻井技术,其将钻井过程中的井控设备和井控工艺进行了进一步的集成和强化[6]。MPD系统如图1所示,其关键是将钻井液循环系统作为一个密闭压力容器,进而通过一定方法实施控制,同时能够实时监测井筒环空压力,以自动化全闭环方式解决窄安全压力窗口、多压力体系地层的钻井难题[7]。
1.2 MPD任务
作为一个集控制、测量、估计于一体的系统工程,MPD核心控制任务主要表现在两个方面:一方面,通过控制井口回压、环空损耗等,使钻井过程在合适的压力窗口下进行;另一方面,在地层流体侵入井筒后,利用高精度质量流量计监测出口流量,并控制井口节流管汇将环空内过量的地层流体安全排出,以建立新的压力体系。
1.3 MPD的特点及优势
MPD技术的重要特点是配备高精度质量流量计并依赖于井口节流管汇的高精度节流,与常规井控相比在地层流体侵入时无需关井且无需配置重浆。概括起来,MPD在技术上的优势主要表现在以下几个方面:
a. MPD技术可以有效控制整个井筒环空压力剖面,避免地层流体侵入影响钻井液性能或是造成井涌,并使用高精度质量流量计检测溢流或漏失。
b. 在接单根(停泵)和起下钻(停泵)时有效控制井底压力,降低抽吸压力引起溢流或漏失的可能性。
c. MPD技术通过精确的井底压力监测和水力学模型能解决窄压力窗口层段的钻井难题。通过调控节流阀并配合水力学参数分析计算,快速排出井内地层流体,阻止出现二次复杂事故。
1.4 MPD分类
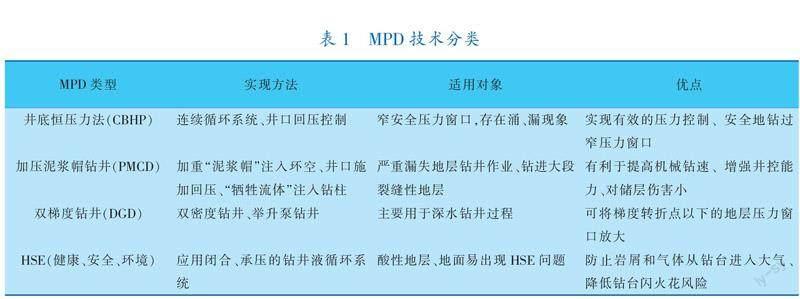
在实际应用中,会根据不同的工艺工况和应用对象采用不同的MPD技术类型。从工艺和技术角度对MPD进行分类,具体见表1。
2 MPD控制理论的国内外研究现状
自MPD技术出现以来,国外学者在MPD理论研究上迅速发展。国内理论研究相对于国外虽有滞后,但已经对MPD系统适用的模型、估计与控制方法进行了广泛研究。中国石油大学(北京)柳贡慧和李军团队、中国石油大学(北京)李根生和宋先知团队、中国石油大学(华东)孙宝江和王志远团队、西南石油大学孟英峰团队以及东北石油大学闫铁团队对MPD瞬态多相流水力学模型进行了深入研究;中国石油集团工程技术研究院有限公司周英操和刘伟团队系统研发了MPD高端装备;中国石油大学(北京)徐宝昌团队深入研究了基于MPD模型的最优估计与控制理论。
2.1 基于PID的MPD井筒压力控制方法
目前,PID或改进的PID控制算法是国内MPD井筒压力控制过程中最主要的控制算法。在中国石油集团工程技术研究院(下称中石油工程院)研制的PCDS精细控压系统中,监控系统由测量控制模块和水力计算模块构成,在测量控制模块中运行PID控制算法以进行井口压力控制并对井口设备的平板阀进行逻辑开关控制[8,9]。吴红建等提出的MPD测控系统采用PID算法进行压力控制,PID控制器参数的整定通过智能化调整或自校正、自适应的算法来实现,其实质仍然是经典的PID控制算法[10]。王文深等建立了MPD
三级井底压力自动化控制架构,并且在反馈控制层引入模糊PID控制算法,在此基础上对国外某井进行MPD多级控制仿真模拟[11]。
PID控制算法的优势在于只需较少的被控对象相关知识,并且只需要调整3个参数。但PID控制算法仅依赖输出反馈对过程实施控制,对于深井复杂地层井筒压力分布这样具有典型非线性、多变量、时变动态特性的对象,其控制响应迟缓,从而导致井底压力出现较大波动(仅考虑PWD测量信号传输滞后这单一因素,都会导致PID算法的控制效果不佳)。
2.2 MPD井筒压力先进控制方法
2.2.1 基于模型的MPD井筒压力控制方法
针对应用PID控制算法进行MPD井筒压力控制的不足,国外学者很早就关注利用基于模型的先进控制算法来提高MPD井筒压力控制的精度和可靠性。GODHAVN J M等通过实验对基于PID算法和基于模型的控制算法的井筒压力控制效果进行比较,结果表明基于模型的控制方法无论是控制精度还是适应性均优于PID算法[12]。
基于模型的先进控制算法首先在于构造能够描述井筒环空动态特性的模型,这一动态模型的建立仍然以瞬态水力学机理为基础,但往往采用一定的近似、简化以及数学变换的方法,使得模型的形式、复杂程度满足后续控制算法的设计与分析。动态模型主要包括经验模型、集总参数模型和分布参数模型3类。表2给出了迄今用于井筒压力控制的动态模型类型。
根据不同的动态模型类型,可引申出不同的控制方法。GRAVDAL J E等在2005年首次将Kalman滤波应用于基于气液两相流模型的MPD过程不可测变量估计中,并基于估计得到的参数进行控制,可以看作是基于模型的MPD井筒压力控制方法研究的最早尝试[22]。模型预测控制
(Model Predictive Control,MPC)作为在流程工业中应用最为成功的先进控制算法,最早被引入到MPD的控制中[23,24]。NYGAARD G H等设计了基于动态模型的非线性模型预测控制算法(Nonlinear Model Predictive Control,NMPC)来稳定井底压力,并和以泵流量作为前馈的比例积分(PI)控制、手动控制做了对比,得出PI控制和NMPC都优于手动控制的结论,但控制过程没有考虑液动节流阀的动态特性,同时没有考虑模型参数变化情况下控制算法的鲁棒性[25,26],进一步BREYHOLTZ ?覫等将NMPC算法应用于双梯度钻井过程中,通过控制算法自动控制泥浆泵流量、水下泵流量和起下钻速度,以克服井底压力波动[27~29]。M?覫GSTER J等使用挪威国家石油公司内部MPC软件SEPTIC通过对泥浆流量和节流阀开度的控制实现了对井底压力的跟踪,但是该控制器在处理溢流和泵排量严重下降时的效果还有待研究[30]。最近几年有文献将NMPC与Hammerstein-Weiner模型结合用于MPD控制,该控制器的控制目标是控制井底压力的同时减少溢流[31]。
以上大都是以集总参数模型为基础进行控制算法的设计。但实际控压过程中通过控制地面节流阀开度来改变井底压力,由于节流阀位于地面而被控变量在几千米下的井底,用分布参数模型刻画环空动态特性更为准确,此时的控制转化为典型的边界控制问题。对于MPD井筒压力分布参数控制系统的研究近几年得到更多的关
注[32~34]。分布参数模型可以更准确地描述井筒压力的动态变化特性,但其后续的控制方法设计过于复杂,并且计算量庞大,算法的数值鲁棒性差,因此对于复杂地层井筒压力控制这种安全可靠性要求极高的问题来说,如何将高精度分布参数模型纳入实时控制的同时又能够降低控制算法复杂度和计算成本、提高算法的鲁棒性也受到学者的关注[35]。徐宝昌等基于分布参数系统所描述的井筒环空水力学模型,提出了一种无限维边界控制方法,通过将PDE系统等价转换并分解为若干子系统设计边界控制器,实现井底压力的恒定与跟踪[36]。
2.2.2 MPD井筒压力的多变量协同控制方法
传统的MPD井筒压力多变量控制方法更多局限在以操控节流阀开度和泵流量为主,且控制目标多局限在井底压力的控制上。近年来,国内外学者在考虑重要操控变量(RPM、WOB等)的基础上,逐渐实现了在保证井底压力控制精度的同时优化钻进效率的目标。图2描述了多源变量协同机制下的控制系统框架。
MAMMADOV E等提出将MPD系统与其他操控子系统(如司钻子系统)综合考虑以解决钻井过程的机械钻速(ROP)优化控制问题,将井底压力、ROP、RPM控制耦合到单一的钻井控制器中,利用井下和地面测量的数据同时调节井底钻具组合(BHA)压力并使ROP最大化[37]。SOOKLAL S等分析了回压、泵流量之外其他影响MPD井底压力的因素,包括RPM、环空固相分量的变化、LCM的影响,并指出有效抑制这些因素的干扰是在深水、高温高压井中应用MPD控制井筒压力的关键[38]。孟卓然等针对井底压力控制精度低且钻进时效差等关键技术瓶颈,建立適合控制系统设计的MPD过程全局模型,且基于先进控制理论提出稳定井底压力、提高机械钻速并减弱粘滑振动幅值的非线性模型预测控制方法,构建了一种综合多性能指标的控压钻井过程协调控制方法[39]。
2.3 MPD井筒压力控制中智能控制方法的应用
对于深井复杂地层的MPD井筒压力控制问题,已有不少基于模型的先进控制算法的应用,但是在智能控制方法上所做的工作仍十分有限。
在智能控制器方面,Weatherford公司明确提出在其MPD装置中应用智能控制单元(Intelligent Control Unit,ICU)以实现井筒压力的智能控制,但关于ICU中的核心控制算法未见公开[40~42]。MOOSAVINIA M等指出MPD智能控制系统的实现需要借鉴流程工业智能化的思想,从多传感器表决系统、接单根/起下钻时节流阀控压性能、智能仪表的应用与在线故障检测、自适应PID算法的应用等几个方面论述了当今MPD系统存在的问题与未来的展望,指出自动控制与智能算法的深度融合才能推动智能MPD系统的进一步发展[43]。SEHSAH O等基于智能钻杆提出智能钻井系统,其更侧重于井下信息的高效传输,同样对于智能控压方法并未详细描述[44]。中国石油大学(北京)的郑德建建立了反映井筒压力动态特性的非线性模型,将径向基函数神经网络与状态观测器结合对井下不可测状态进行估计,在此基础上设计L1自适应控制器对井底压力进行控制[45]。
另外,近二十年来人工智能技术逐渐渗透和应用于钻井过程的智能处理、闭环控制及优化决策等各个层次当中,形成特定且具有智能特征的钻井技术,对MPD井筒压力的智能控制也具有一定的借鉴意义。
2.4 MPD参数估计方法研究
MPD井筒压力控制过程中,井下可测变量非常少,并且传输速率不足以满足实时控制的要求。因此,研究可靠的参数估计方法对MPD井下不确定信息进行实时估计,对保证安全高效钻井具有重大意义。
ZHOU J等基于简化的水力学模型(集总参数,ODE),通过设计状态观测器估计钻头处流量和井底压力,设计了井底压力非线性控制律。区别于传统的井底压力预测方法,ZHOU J等是将自适应观测器理论与动态模型相结合,通过简化的三阶ODE模型实现不可测状态估计-非线性反馈控制律的一体化设计[46~48]。为实现井下不确定参数与未知状态的联合估计,徐宝昌等设计了一种全新的非线性状态观测器,以井筒为对象建立井下三阶动态模型,准确估计井下流量和压
力[49]。
此外,MPD参数估计对于钻井过程中异常工况的判断具有重要意义。徐宝昌等以井下气侵工况的早期监测为目标,提出了基于数据驱动的气侵诊断新方法,将MPD装备采集的数据通过自适应观测器处理,估计井下未知参数和不可测变量,并将估计的变量与其他可测变量进行独立主元分析,提取数据的独立元,确定统计量控制限用于气侵工况诊断[50]。遗憾的是,受限于模型结构与精度,基于观测器理论的气侵诊断方法并未在现场大规模应用。为增强该方法在实际应用中的可行性,徐宝昌等在传统控压钻井水力学模型中添加气体膨胀项,建立控压钻井气液两相流模型,并设计一种可对未知参数以及未知状态进行联合估计的自适应观测器,在估计井底压力的基础上判断异常工况的发生[51]。
3 MPD装备的国内外发展动态
3.1 国外MPD装备
随着钻井需求的增加,MPD装备从20世纪90年代末开始研发。目前国际上形成商业化产品且能够进行现场施工服务的主要有以下3类MPD系统[6]。
3.1.1 Weatherford MFC
Weatherford公司研发的MPD系统主要以微流量控制作为控压方式,通过实时监测进出口钻井液的微小压力、质量流量、当量循环密度及流速等参数,快速改变井口回压以满足钻井工艺要求。该MPD系统能在小于80 L时检测到溢流,并可在2 min内控制溢流,使总溢流体积小于800 L。
3.1.2 Schlumberger DAPC
Schlumberger公司研发的MPD系统的主要控压方式为井底恒压法,通过节流管汇、回压泵、水力学模型和综合压力控制器协同工作,提供不间断的精确压力控制,使井底压力保持在允许范围内。在强调自动调节回压、动态控制和保持井底压力稳定的基础上,追求在系统中实现自适应控制。
3.1.3 Halliburton MPD
由Halliburton公司自主研发的控压钻井系统(图3)引入了自循环回压泵以确保在施加压力时能够平稳地补偿回压,从而减小压力波动。此外,该MPD系统能够通过节流阀改变环空压力,并通过手动或自动调整节流控制装置,成功实现了对井底压力的精准控制。其装备具有自动化、反应迅速及控制精度高等优势,对井口回压自动控制的精度达到0.35 MPa。
3.2 国内MPD装备
国内石油公司从2008年开始MPD装备的研制工作,并取得了一定进展[52],具有代表性的是中石油工程院研发的PCDS精细控压钻井系列化装备[53~55]。
3.2.1 PCDS-Ⅰ精细控压钻井装备
PCDS-Ⅰ精细控压钻井装备集恒定井底压力控制与微流量控制于一体,在正常工况下可实现0.2 MPa的井底压力控制精度。该系统主要由自动节流系统(图4)、回压泵系统(图5)、液气控制系统、自动控制系统和控制中心等部分构成。
装备集成了井底压力测量、地面参数监测、控压钻井水力计算模型、设备在线智能监控与应急处理功能,具有三节流通道,即主、备、辅3条通道,可随工况的变化自动切换通道,可实现出入口流量监测、流量自动补偿以及实时参数采集与监测等功能,适用于窄压力窗口井、高温高压井、复杂压力体系井和欠平衡控压井。
3.2.2 PCDS-Ⅱ精细控压钻井装备
PCDS-Ⅱ精细控压钻井装备(图6)在PCDS-Ⅰ的基础上,重点对软件系统进行了升级。升级后的系统装备具备模块化施工能力,实现了分模块控制和工艺工况自动匹配、回压控制及流量补偿分離等功能。另外,集成软件将控压钻井水力学模型、设备在线智能监控与应急处理集中于一体,做到了兼容外部设备的功能。
装备具有双节流通道,即主、备双通道,可自由切换,实现了模块化设计和高精度出口流量监测,可选择不同的流量补偿装置(包括固井泵等第三方装备),适用于海洋控压钻井、窄压力窗口井和欠平衡控压井等。
3.2.3 PCDS-S精细控压钻井装备
PCDS-S精细控压钻井自动控制系统(图7)由中石油工程院和中国石油大学(北京)徐宝昌团队共同研制。相比PCDS-Ⅰ和PCDS-Ⅱ精细控压钻井系统,PCDS-S控压钻井系统添加了自动平衡立压的欠平衡模块及异常工况紧急处理的专家模块,进一步完善了水力模拟和计算软件模块,实现了PLC系统、录井、井下仪器、中控机多平台数据通信及处理等功能,在降低装备成本的基础上拓展了软件功能,增强了复杂工况下的适应性。
PCDS-S精细控压钻井装备的特征是具有单节流通道和出口流量监测,适用于低渗/特低渗井、欠平衡控压和较大压力窗口井。
3.2.4 海洋精细控压钻井装备
三通道海洋控压钻井装备(图8)由中石油工程院和中国石油大学(北京)徐宝昌团队共同研制,应用一种双闭环串级智能控制算法实现对井口压力和液动节流阀阀位的控制,在完成现场实验后已顺利投入生产。
自动控制系统主要包括自动节流管汇系统和控制房。其中自动节流管汇系统包括节流撬防爆控制柜、高精度液控节流控制操作站、节流管汇、智能检测仪表、节流阀、平板阀及手动阀等装置。该套控压系统既可以远程自动控制节流管汇中的节流阀开度,又可以在液控操作站本地手动控制节流阀开度,保证任何情况下的不间断连续钻井工作。
4 MPD技术的关键问题
近十几年来,MPD作为一项解决复杂钻井问题的重要技术,在控制理论研究与装备研发方面都得到了飞速发展,然而在以下方面仍然值得深入研究:
a. 国内控压钻井装备研制工作虽在近年来取得了一定进展,但由于钻井过程存在复杂的工况变化和诸多不确定性干扰,以及被传统钻井工程技术理念束缚,导致钻井过程以技术人员的手动操作为主,自动化装备为辅。事实上,控压钻井装备的自动化水平远远滞后于当代信息化、自动化、智能化技术的发展,且异常工况(微溢、微漏、溢漏同存等)的早期诊断、发生异常工况后抑制压力波动和消除异常工况的能力仍然不足。
b. 突破深部地层井筒压力控制性能瓶颈的关键是信息的充分获取与利用。首先,在井筒压力控制过程中,如果能够充分利用采集到的井底、地面大量的实时动态数据(例如基于动态模型对未知参数和变量进行有效的实时估计),则可能对井下信息有更迅捷、清晰的感知,并利用这些信息进行更为超前、智能的控制。其次,目前没有可靠的模型可以完全精准地描述井筒水力特性,因此基于实时计算与反馈校正方法,利用适当模型并结合有效数理变换方法,实现模型校正的同时揭示井筒早期参数监测机制与变化规律至关重要。
c. 近年来随着人工智能技术的发展,智能钻井技术正在成为极具发展潜力的油气勘探开发新技术之一。在深部复杂地层的井筒压力控制中,将人工智能理论与已有知识(专家经验、地质-工程数据等)深度融合,减少单纯依靠人工经验所导致的不确定性和不可预测性,以形成更为智能的决策和控制,可能为提升深部复杂地层井筒压力控制性能起到关键作用。
5 结束语
MPD技术在处理复杂地质环境、快速提升钻井安全方面具有极大优势,逐渐成为我国钻井技术的研发热点。笔者系统且详细地对MPD技术的控制理论研究与装备研发进行了以下方面的综述:
a. 从定义、任务、优势与分类4个方面对MPD技术进行了详细地概述。
b. 进行了MPD理论的国内外研究现状分析。国内外学者对MPD系统中的井筒压力控制方法进行了广泛研究,从初始阶段的经典PID算法,到逐渐应用先进控制算法,再到引入智能化思想,MPD井筒压力控制方法正在经历一个从简单控制到复杂控制、从基本自动化向智能控制发展的历程。同时,也强调了MPD模型与参数估计问题的发展现状。
c. 介绍了MPD装备的国内外发展动态。在分析国外Weatherford、Schlumberger和Halliburton三大公司精细控压钻井系统的同时,特别介绍了国内自主研发的PCDS精细控压钻井系列化装备与海洋精细控压钻井装备。
d. 国内MPD技术在理论日趋成熟的同时也在工程实践中取得了良好效果,然而在信息化、自动化、智能化水平的提升上亟待攻关。
参 考 文 献
[1] 李根生,吴文,陈勉,等.深井复杂地层安全高效钻井基础研究[J].中国科技成果,2014(13):21-22.
[2] 苏义脑,路保平,刘岩生,等.中国陆上深井超深井钻完井技术现状及攻关建议[J].石油钻采工艺,2020,42(5):527-542.
[3] 劉伟,王瑛,郭庆丰,等.精细控压钻井技术创新与实践[J].石油科技论坛,2016,35(4):32-37.
[4] DAS A K,SMITH J R,FRINK P J.Simulations comparing different initial responses to kicks taken during managed pressure drilling[C]//SPE/IADC Drilling Conference and Exhibition.SPE,2008:SPE-112761-MS.
[5] HINTON A J.A new chapter in MPD:subsea pumping[C]//IADC/SPE Managed Pressure Drilling and Underbalanced Operations Conference & Exhibition. OnePetro,2009:SPE-122201-MS.
[6] 刘伟,蒋宏伟,周英操,等.控压钻井装备及技术研究进展[J].石油机械,2011,39(9):8-12.
[7] 王果,樊洪海,刘刚,等.控制压力钻井技术应用研究[J].石油钻探技术,2009,37(1):34-38.
[8] LIU W, SHI L, ZHOU Y C, et al.Development and application of Managed Pressure Drilling system (PCDS) for drilling complex problem[C]//International Petroleum Technology Conference.Beijing,China:IPTC,2013:IPTC-17143-MS.
[9] 王德玉,李才良,徐建平,等.计算机控制在井控系统中的应用[J].石油矿场机械,2007,36(1):52-55.
[10] 吳红建,郗凤亮,柯晓华.智能控压钻井控制技术试验研究[J].石油天然气学报,2013,35(11):150-154;10.
[11] 王文深,张淼淼,卢怡,等.基于模糊PID算法的MPD仿真控制研究[J].石油机械,2017,45(6):36-39.
[12] GODHAVN J M,PAVLOV A,KAASA G O,et al.Drilling seeking automatic control solutions[J].IFAC Proceedings Volumes,2011,44(1):10842-10850.
[13] GRAVDAL J E,NIKOLAOU M,BREYHOLTZ ?覫, et al.Improved kick management during MPD by real-time pore-pressure estimation[J].SPE Drilling & Completion,2010,25(4):577-584.
[14] STAMNES O N, ZHOU J, KAASA G O, et al.Adaptive observer design for the bottomhole pressure of a managed pressure drilling system[C]//2008 47th IEEE Conference on Decision and Control.Piscataway,NJ:IEEE,2008:2961-2966.
[15] KAASA G O,STAMNES?覫 N,IMSLAND L,et al.Simplified hydraulics model used for intelligent estimation of downhole pressure for a managed-pressure-drilling control system[J].SPE Drilling & Completion,2012,27(1):127-138.
[16] GJERSTAD K,AAMO O M.A dynamic model of two-phase flow for simulating gas kick and facilitating model-based control in drilling operations[J].Journal of Petroleum Science and Engineering,2021,205:108902.
[17] ZUBER N,FINDLAY J A.Average volumetric concentration in two-phase flow systems[J].Journal of Heat Transfer,1965,87(4):453-468.
[18] FJELDE K K, ROMMETVEIT R, MERLO A, et al.Improvements in dynamic modeling of underbalanced drilling[C]//IADC/SPE Underbalanced Technology Conference and Exhibition. OnePetro,2003:SPE-81636-MS.
[19] PEREZ-TELLEZ C, SMITH J R, EDWARDS J K.A new comprehensive,mechanistic model for underbalanced drilling improves wellbore pressure predictions[J].SPE Drilling & Completion,2003,18(18):199-208.
[20] CHOI J,PEREYRA E,SARICA C,et al.An efficient drift-flux closure relationship to estimate liquid hold-
ups of gas-liquid two-phase flow in pipes[J].Energies,2012,5(12):5294-5306.
[21] BHAGWAT S M,GHAJAR A J.A flow pattern independent drift flux model based void fraction correlation for a wide range of gas-liquid two phase flow[J].International Journal of Multiphase Flow,2014,59:186-205.
[22] GRAVDAL J E,LORENTZEN R J,FJELDE K K,et al.Tuning of computer model parameters in managed pressure drilling applications using an unscented Kalman filter technique[C]//SPE Annual Technical Conference and Exhibition.SPE,2005:SPE-97028-MS.
[23] NYGAARD O G H.Multivariable process control in high temperature and high pressure environment using non-intrusive multi sensor data fusion[D].Porsgrunn,Norway:Telemark University College,2006.
[24] NYGAARD G, NAEVDAL G. Nonlinear model predictive control scheme for stabilizing annulus pressure during oil well drilling[J].Journal of Process Control,2006,16(7):719-732.
[25] NYGAARD G H,IMSLAND L S,JOHANNESSEN E A.Using NMPC based on a low-order model for controlling pressure during oil well drilling[J].IFAC Proceedings Volumes,2007,40(5):159-164.
[26] NYGAARD G H,JOHANNESSEN E,EINAR GRAV-
DAL J,et al.Automatic coordinated control of pump rates and choke valve for compensating pressure fluctuations during surge and swab operations[C]//SPE/IADC Managed Pressure Drilling and Underbalanced Operations Conference and Exhibition.SPE,2007:SPE-108344-MS.
[27] BREYHOLTZ ?覫,NYGAARD G,NIKOLAOU M.Advanced automatic control for dual-gradient drilling[C]//SPE Annual Technical Conference and Exhibition.SPE,2009:SPE-124631-MS.
[28] BREYHOLTZ ?覫,NYGAARD G,NIKOLAOU M.Automatic control of managed pressure drilling[C]//Proceedings of the 2010 American Control Conference.Piscataway,NJ:IEEE,2010:442-447.
[29] BREYHOLTZ ?覫,NYGAARD G,NIKOLAOU M.Ma-
naged-pressure drilling:Using model predictive control to improve pressure control during dual-gradient drilling[J].SPE Drilling & Completion,2011,26(2):182-197.
[30] M?覫GSTER J,GODHAVN J M, IMSLAND L S.Using MPC for managed pressure drilling[J].Modeling,
Identification and Control(MIC),2013,34(3):131-138.
[31] NANDAN A,IMTIAZ S.Nonlinear model predictive control of managed pressure drilling[J].ISA Transactions,2017,69:307-314.
[32] KRSTIC M,SMYSHLYAEV A.Backstepping bounda-
ry control for first-order hyperbolic PDEs and application to systems with actuator and sensor delays[J].Systems & Control Letters,2008,57(9):750-758.
[33] DI MEGLIO F, VAZQUEZ R, KRSTIC M, et al.Backstepping stabilization of an underactuated 3×3 linear hyperbolic system of fluid flow equations[C]//2012 American Control Conference (ACC). Piscataway,NJ:IEEE,2012:3365-3370.
[34] ANFINSEN H,AAMO O M.Boundary parameter and state estimation in 2×2 linear hyperbolic PDEs using adaptive backstepping[C]//2016 IEEE 55th Conference on Decision and Control(CDC).Piscataway,NJ:IEEE,2016:2054-2060.
[35] EATON A N,BEAL L D R,THORPE S D,et al.Real time model identification using multi-fidelity models in managed pressure drilling[J].Computers & Chemical Engineering,2017,97:76-84.
[36] 徐宝昌,胡松,孟卓然,等.井筒环空水力分布参数系统的全状态反馈控制方法[J/OL].控制工程:1-
8[2023-07-06]. https://doi. org/10.14107/j.cnki.kzgc.
20220553.
[37] MAMMADOV E,OSAYANDE N,BREUER J,et al.Predicting and optimizing ROP in competent shale by utilizing MPD technology[C]//SPE Annual Technical Conference and Exhibition.SPE,2015:SPE-174805-MS.
[38] SOOKLAL S, HERNANDEZ J, ARNONE M, et al.MPD-Overlooked Factors that Impact Annular Pressure Control with High-Solids Concentration Drilling Fluid Systems in Narrow Window Wells[C]//SPE/
IADC Managed Pressure Drilling and Underbalanced Operations Conference and Exhibition.SPE,2018:D021S010R002.
[39] 孟卓然,徐宝昌,罗雄麟.基于综合性能指标的控压钻井过程多变量协调控制[J].Journal of China University of Petroleum,2022,46(2):183-195.
[40] GUMUS F,POBEDINSKI I, HANNEGAN D, et al.Live Well Display & Automated Data Analysis to Improve Timely Well Control & Drilling Optimization Decision-Making in MPD Operations[C]//Offshore Technology Conference.OTC,2014:D011S002R001.
[41] OZEGOVIC A,GOMEZ E,ZAMBRANO R,et al.Managed Pressure Drilling Strategies Enable Successful Drilling of the Deepest HPHT Exploratory Well in the Mediterranean Sea[C]//Offshore Medite-
rranean Conference and Exhibition. OMC, 2015:OMC-2015-231.
[42] ROSTAMI S A.Enhancing MPD Functionality:Successful Application of Adaptive Intelligent Drilling Software in Deepwater,Offshore and Onshore Operations[C]//IADC/SPE Managed Pressure Drilling & Underbalanced Operations Conference & Exhibition.OnePetro,2017:SPE-185287-MS.
[43] MOOSAVINIA M,PARKER M,ALEXANDROV V,et al.Intelligent control for MPD[C]//SPE/IADC Managed Pressure Drilling and Underbalanced Operations Conference and Exhibition.SPE,2016:SPE-180069-MS.
[44] SEHSAH O,GHAZZAWI A,VIE G J,et al.Intelligent drilling system: expanding the envelope of wired dr-
ill pipe[C]//Abu Dhabi International Petroleum Exhibition and Conference.SPE,2017:D021S059R003.
[45] 鄭德建.基于L1自适应算法的MPD井底压力控制[D].北京:中国石油大学(北京),2018.
[46] ZHOU J,STAMMNES Ф N,AAMO O M,et al.Obese-
rved-Based Control of a Managed Pressure Drilling System[C]//2008 Chinese Control and Decision Conference(CCDC 2008). Piscataway,NJ:IEEE,3474-3480.
[47] ZHOU J,STAMMES Ф N,AAMO O M,et al.Pressure regulation with kick attenuation in a managed pressure drilling system[C]//IEEE Conference on Decision and Control.Piscataway,NJ:IEEE,2009:5586-5591.
[48] ZHOU J,STAMNES Ф N,AAMO O M,et al.Switched control for pressure regulation and kick attenuation in a managed pressure drilling system[J].IEEE Transactions on Control System Technology,2011,19(2):337-350.
[49] 徐宝昌,孟宇,刘伟.控压钻井井下不可测变量的非线性估计[J].石油学报,2016,37(12):1543-1549.
[50] 徐宝昌,周家立,刘伟,等.基于数据驱动的钻井过程气侵工况预测方法[J].石油学报,2019,40(10):1263.
[51] 徐宝昌,孟卓然,陈贻祺,等.控压钻井井下气侵工况的自适应参数及状态估计[J/OL].控制与决策:1-9[2023?鄄08?鄄01].DOI:10.13195/j.kzyjc.2022.0673.
[52] 刘伟,周英操,段永贤,等.国产精细控压钻井技术与装备的研发及应用效果评价[J].石油钻采工艺,2014,36(4):34-37.
[53] 刘伟,周英操,王瑛,等.国产精细控压钻井系列化装备研究与应用[J].石油机械,2017,45(5):28-32.
[54] 周英操,杨雄文,方世良,等.PCDS?鄄Ⅰ精细控压钻井系统研制与现场试验[J].石油钻探技术,2011,39(4):7-12.
[55] 周英操,刘伟.PCDS精细控压钻井技术新进展[J].石油钻探技术,2019,47(3):68-74.
(收稿日期:2023-03-01,修回日期:2023-08-07)
Control Theory Research and Progress in the Equipment Development
of Managed Pressure Drilling
YIN Shi-xuan, XU Bao-chang, MENG Zhuo-ran, CHEN Yi-qi
(College of Information Science and Engineering, China University of Petroleum (Beijing))
Abstract In this paper, the MPD (managed pressure drilling) technology was introduced and the domestic and foreign research status of the MPD theory was systematically analyzed, including mainly discussing the development process of wellbore annular pressure control methods (from classical PID algorithm to advanced control algorithm, and then to the intelligentization concept) and the research status of MPD parameter estimation methods. In addition, the current status of the MPD equipment and technology at home and abroad was introduced and manufacturing level of existing equipment at home was emphasized to point out key issues worthy of further research in the MPD technologies.
Key words MPD, wellbore annular pressure, advanced control, intelligentization, equipment development
作者簡介:尹士轩(1999-),博士研究生,从事复杂系统建模、参数估计与故障诊断方面的研究。
通讯作者:徐宝昌(1974-),副教授,从事基于深度神经网络的复杂系统建模、油气集输过程的智能控制与优化、控压钻井技术、钻井过程智能控制与协同优化的研究,xbcyl@cup.edu.cn。
引用本文:尹士轩,徐宝昌,孟卓然,等.控压钻井的控制理论研究与装备研发进展[J].化工自动化及仪表,2023,50(5):622-631.
猜你喜欢
军事文摘(2022年19期)2022-10-18
纺织科学研究(2021年7期)2021-08-14
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年10期)2021-07-16
印刷工业(2020年4期)2020-10-27
印刷工业(2020年4期)2020-10-27
中国储运(2019年5期)2019-05-15
能源(2018年10期)2018-12-08
中国交通信息化(2017年4期)2017-06-06
中国公路(2017年12期)2017-02-06