基于STM32 的声源检测系统设计
2023-09-27 10:42高宇轩蔡雨如喻袁兵李志明
电子制作 2023年19期
高宇轩,蔡雨如,喻袁兵,李志明
(南京铁道职业技术学院,江苏南京,210031)
0 引言
近年来,随着自然环境的恶劣变化,自然灾害频发,地理环境的复杂程度加大了自然灾害救援的难度,往往被覆盖物掩埋导致救援目标难以被发现,普通无线通讯设备信号难以传播,救援队的搜救工作难以进行。为了让救援队对搜救目标进行准确定位,提高救援效率。本文设计了一款基于STM32F103ZET6 的声源检测系统的装置。声源定位作为一种传统的侦察手段,近年来通过采用新技术,提高了性能,满足了现代化的需要,其主要特点是:
(1)便携式系统。系统由一个小单片机系统外加一个声音传感器阵列组成,方便室外救援和作业,并且声源不受视线限制。该声源定位系统可以定位障碍物后面的声源。
(2)造价便宜。声测系统不受电磁波干扰也不会被无线电测向及定位,工作隐蔽性较强。
(3)系统适应恶劣条件,能全天候工作,不受能见度限制。声测系统可以在白天,夜晚、雾霾天和雨雪天工作,具有全天候系统正常运行的特点。
1 系统理论方法分析
通过引入一个加权函数,基于广义互相关函数的时延估计算法可以有效地调整互功率谱密度,从而提升其性能,达到更优的结果。通过改进GCC-PHAT 函数,我们可以实现多种不同的广义互相关函数,从而提高系统的效率和准确性。根据研究结果,当GCC-PHAT 函数的最大值较大时,麦克风的接收信号更加可靠,从而提升了接收信号的质量。GCC-PHAT 技术具有出色的抑制噪音和抑制振动的能力。
通过分析两个麦克风之间的相关性,我们可以使用广义互相关函数来估计它们之间的时延。在声源定位系统中,麦克风阵列的每个阵元接收到的目标信号都来自同一个声源。因此,各通道信号之间具有较强的相关性。理想情况下,通过计算每两路信号之间的相关函数,就可以确定两个麦克风观测信号之间的时延。
阵列中两个麦克风的接收信号为:
其中s(t)为声源信号,n1(t)和n2(t)为环境产生的噪声,τ1和τ2是声源信号到两个麦克风阵元的传播时间。相关参数如图1 所示。
互相关算法经常被用来做时延估计,表示为:
代入信号模型,因为s(t)和n1(t)互不相关,则可以简化为:
其中τ12=τ1-τ2,假设n1和n2是互不相关的高斯白噪声,则上式可以进一步简化为:
2 系统工作原理
本系统主要由STM32F103ZET6 单片机系统板、声源模块、变压模块、稳压模块、精密整流模块、麦克风传感器、4×4 矩阵键盘、LCD 显示屏等部分组成。由选手使用矩阵键盘发出调试信号,通过麦克风传感器检测声源变化并向单片机发送数据,单片机开始运算分析,最终使得声源指示控制装置运行并显示在LCD 液晶显示屏和远程云计算平台,如图2 所示。
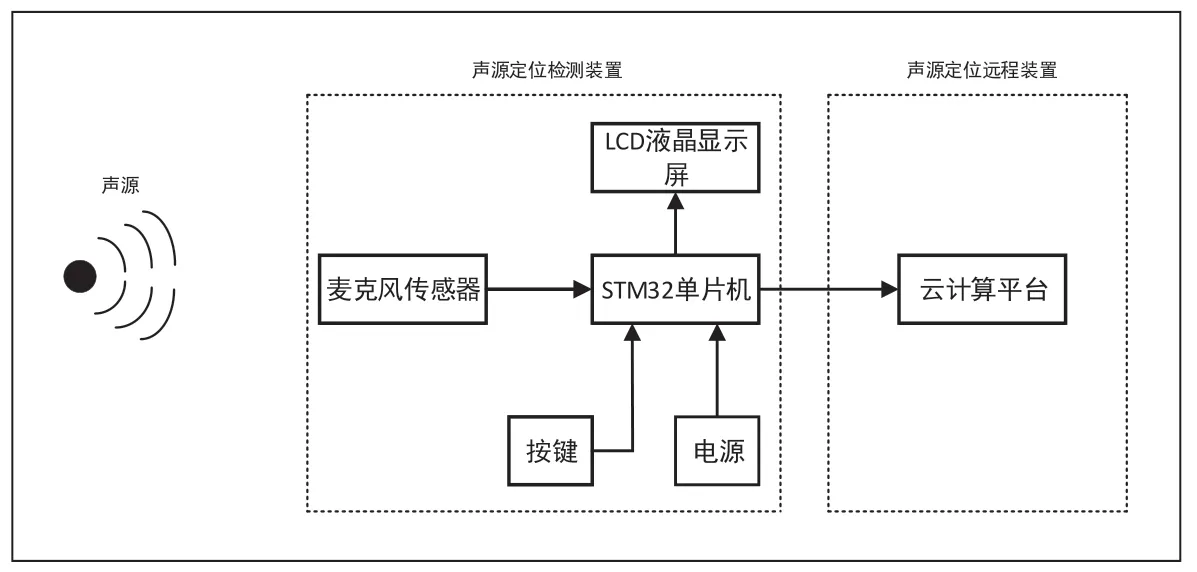
图2 声源定位跟踪系统框图
3 核心部件电路设计
■3.1 关键器件性能分析
(1)控制单位情况:STM32 是一款采用ARMCortex-M332bit 微控制器、48 路LQFP 封装的中等密度性能线,它结合了运行频率可达72MHz 的高性能RISC 核心,以及强化输入/输出和外接到两个APB 总线的高速内嵌存储器。拥有12 位模数转换器、计时器、PWM 计时器、标准和高级通信接口等,一套全面的省电模式让设计人员能够设计出低功耗的应用程序,系统板件本身也更加小巧。
(2)麦克风传感器:采用 LM386 芯片,工作电压4~12V 或 5~18V,传感器为使外围元件最少,电压增益内置为 20。但在1、8 足间加一外接电阻及电容,则电压增益调至任意值为200即可。输入端以地为参照物,而输出端则自动偏置到电源电压的一半,其静态功耗只有24mW,处于6V 电源电压下。
■3.2 核心电路设计
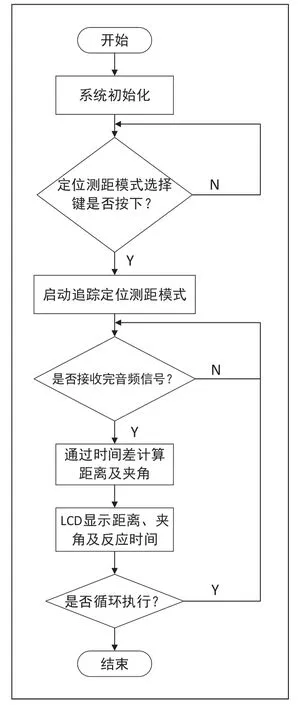
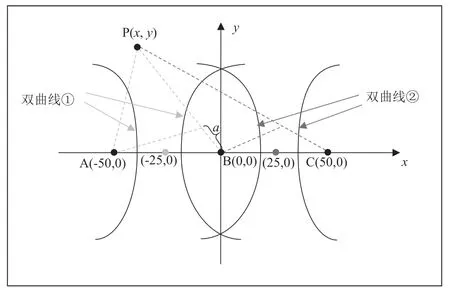
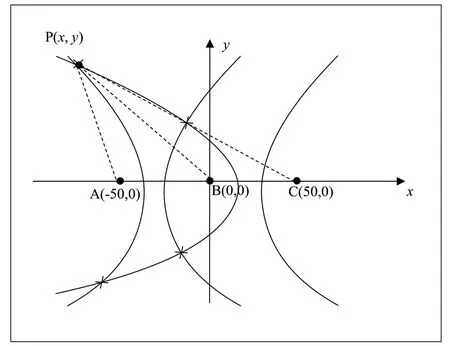
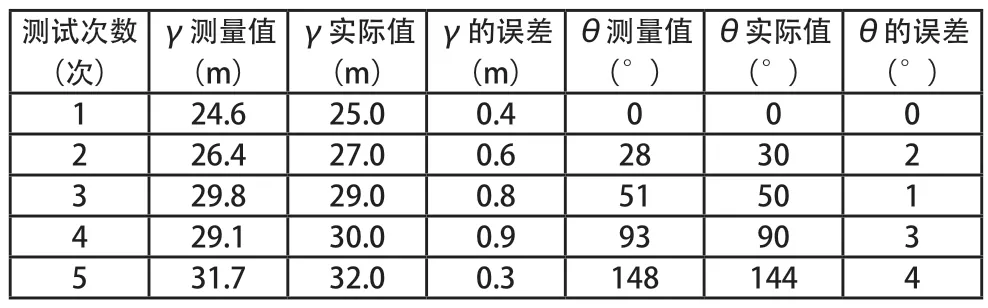
该峰值检测电路,当Vin>Vout时,就输出接近正电源轨的电压;当Vin 图3 峰值检测电路原理图 (1)声源定位原理 方案一:AOA 定位原理,全称Angle of Arrival 的缩写。其基本的原理是:设备在AOA 定位角中,节点通过接收来自声波的接收机发送的信号,运用数据计算节点间对应的角度和方位,然后运用算法就可以得出它的具体坐标。接收节点排列成一定形状的麦克风阵列,通过响应发射信号的到达来分析出角度等信息。但其有多径效应带来的影响,发送的信号因为直射波和反射波的重叠导致的多径效应引起信号的衰落,对传感器要求更高,或者对工作环境要求更高,应用成本便会加大。参考应用环境,故不适用。 方案二:基于TDOA 声源定位原理,接收节点的麦克风模块检测在接收到专门的伪噪声序列信号后,去根据它的声波信号传播时间与速度来算出前面发送节点和后面接收节点的间距。通过运算得出它离周边这些节点的具体距离后,就可以利用三边测量算法或者极大似然估计算法算出自身的位置。TOA 通过测量它收到的信号在传输过程中需要的时间,然后根据信号的特性转变为距离,去根据距离定位。TOA 定位至少要三个基站的信号,得到互相的距离,才能算出被测设备的位置坐标。大多数声源定位是基于到达时间差的方法,提高对到达时间差估计的准确程度是这种方法的关键。 基于以上分析,选择方案二,采用基于TDOA 声源定位原理。 (2)麦克风传感器 方案一:LM1875,LM1875 是音频功放电路,内置有多种保护电路。LM1875 采用TO-220 封装结构,形如一只中功率管,体积小巧,外围电路简单,且输出功率较大、失真小等特点。该集成电路内部设有过载过热及感性负载反向电势安全工作保护。 方案二:LM386,LM386 是一种音频集成功率放大器,具有低功耗、内链增益可调整、电源电压可调范围大、待机电流很小,仅为4mA、外接元件少和总谐波失真小等优点。在 1 脚和 8 脚之间只需要增加一外接电阻和电容,便可进行电压增益调整(200 以内)。 结合产品需要,LM386 低功耗、外接元器件少,电压增益可调(200 以内),所以最终选择方案二。 (3)显示模块 方案一:采用数码管显示,数码管具有其成本低,亮度高,精确度较高等优点,对于单纯显示数字的电路应用较多,但数码管与单片机连接时,需要外接锁存器进行数据锁存,使用三极管进行驱动等,电路连接相对比较复杂。此外,数码管只能显示少数的几个字符,不适合显示文字与波形,编写显示数字程序比较简单。 方案二:采用LCD 进行显示,LCD12864B 液晶显示屏,自带中文字库,不但能显示字符和数字,而且显示效果较好,容易实现编程。此外LCD 还具有功耗较低、无辐射危险、分辨率高,平面直角显示以及影像稳定,抗干扰能力较强,显示内容多且清晰等特点。并且,液晶显示器与单片机可直接相连,电路设计及连接简单。 基于以上分析,由于该系统需要显示文字、数字与字符,采用方案二,选择液晶LCD12864B 进行显示。 (4)角度传感器的选择 方案一:采用MPU6050 角度传感器。MPU6050 角度传感器可准确追踪快速与慢速动作,集成了3 轴MEMS 陀螺仪,3 轴MEMS 加速度计,以及一个可扩展的数字运动处理器DMP,测量角度范围较广,工作环境稳定。 方案二:采用WOA-B/WOA-C 系列霍尔角度传感器,无接触,无噪声,灵敏度高,但开关量精度不高,高频响应特性好。 经综合考虑,最终选择方案一。 系统上电后进行初始化。调用矩阵按键子程序,判断定位测距模式选择键是否被按下。如果选择键按下,则启动追踪定位测距模式,检测音频信号,判断是否接收完音频信号,如果接收完音频信号,系统将通过时间差计算声源的距离、夹角及反应时间,在LCD 上显示数据。声源定位跟踪系统总体工作流程图,如图4 所示。 图4 声源定位跟踪系统总体工作流程图 单片机进行双曲线交叉定位法判断出时间差,实时检测定位声源的位置信息。双曲线交叉算法如图5、图6 所示。 图5 双曲线交叉定位 图6 双曲线交叉定位 假设三个传感器A,B,C 位于同一直线,两两间隔0.5m,故以此建立坐标系 A(-50,0),B(0,0),C(50,0),待测声源位于P(x,y)处。则AP-BP=a,BP-CP=b,当A,B 固定,满足|AP-BP|为定值的所有P 点的集合为一组双曲线,P 为两条双曲线的支点,可以直接写出双曲线表达式: 方程联立:由①得: 直接求得x=0,求根得出x1 和x2 两个数值。当a<0,判断声源在左侧,则x=x1,当b>0,声源在右侧,x=x2,当a ≥0 且b ≤0,声源位于中间,x 为x1 和x2 中最小值,代回原方程求解出y,从而确定声源位置。 当声源定位跟踪系统的硬件和软件设计完成后,需要对系统进行性能测试,继而判定该系统的设计是否合理。考虑到该系统的实际运用状态,故从不同角度和距离进行测试。具体的距离γ 及夹角θ 的声源性能测试结果,如表1 所示。 表1 声源距离γ及夹角θ的性能测试数据 由表1 所示的声源性能测试结果可知,该系统的运行工作状态良好。整个系统按照控制指令正常运行,且响应速度较快,精度较高,满足实际运用的需要。综上所述,该声源定位跟踪系统的结构布局比较合理,性能测试结果良好,达到了预期的设计要求。 在声源检测系统的设计中,以STM32 为主控板,将各模块合成一个完整的系统。通过对声源检测系统软、硬件的设计、性能测试等阶段,验证了该声源检测系统具有良好的定位跟踪效果,同时也佐证了该控制系统的结构合理性。下一步工作,在此基础上增加外设模块,扩展出其他功能,将对该产品开展进一步的优化设计,应用在机械系统的运行状态监测和故障诊断,一个可靠的机械运行诊断系统,需要在持续不断工作的机器上,从每个可能出现故障的部件中获得有用的数据。通常声源定位技术,作为虚拟传感工具来测量机械振动声学信息。满足更多多元化的用户需求。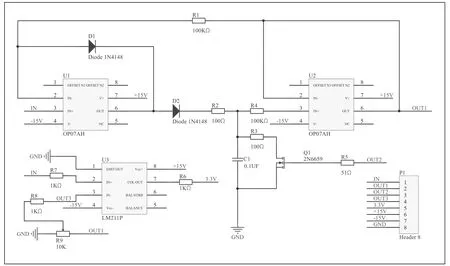
■3.3 技术方案分析比较
4 系统软件设计分析
5 性能测试
6 结论
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
复旦学报(自然科学版)(2019年3期)2019-07-19
电子制作(2019年9期)2019-05-30
电子制作(2019年23期)2019-02-23
电子测试(2018年23期)2018-12-29
小学科学(2016年12期)2017-01-06
噪声与振动控制(2016年5期)2016-11-09
做人与处世(2015年19期)2015-09-10