基于STC 微控制器的DC 电机系统设计
2023-09-27 10:42王杰杰龚光剑
电子制作 2023年19期
王杰杰,龚光剑
(扬州大学 物理科学与技术学院,江苏扬州,225009)
0 引言
随着现代化生产规模的不断扩大,各个行业对直流电机的需求愈益增大,并对其性能提出了更高的要求。为此,研究并制造高性能、高可靠性的直流电机控制系统有着十分重要的现实意义。在现实的生活世界中,通常都是采用各种电机作为原生动力去拖动各种生产机械,如机床、鼓风机、传送带等。随着智能和自动化控制系统的飞速发展,对电机驱动的要求越来越高,对其精度和工作速度的要求也越来越高。电机一般需要达到快速起动、制动以及反转,在大范围内可以精准调速等基本要求。要完成这些任务,必须有智能控制设备来控制电机的运转。
电子技术和计算机技术的飞速发展,微型计算机在信息技术领域发挥着重要的作用。单片机在嵌入式系统和智能控制方面也渐渐占据主导位置,特别是在智能仪器仪表和智能化控制领域中扮演着极其重要的角色。与此同时,电机在日常工业生产和生活中也越来越普遍,其中以直流电机最具有代表性,其拥有非一般的稳定性和可控性。计算机技术和单片机技术的快速发展,将直流电机在控制方向的发展提升到了新的高度。但是,其调速问题仍然具有一定的研究价值。一般情况下,DCS、PLC 等计算机控制的自动调速系统受到青睐。但其成本却较高,硬件结构复杂,系统运行起来还不是很灵活,系统调试起来也相当繁琐,能量损耗巨大,这样复杂的结构阻碍了直流电机控制技术的传播和推广。为此,有人便提出了采用单片机来实现直流电机的调速控制,以便将其结构趋于简单化,降低其成本以节约资金,从系统方面更加凸显智能化,提高系统本身的优越性和科学性。
伴随着数字集成电路、半导体器件、高精度集成芯片的发展,逐渐丰富了调速控制设计方法,众所周知,直流电机具备较好的启动、制动、调速等性能,目前在工业生产、航空航天等领域得到了广泛的应用。随着科技的不断进步和发展,脉宽调制(PWM)技术已逐渐成为直流电机主流的调速方式,因其优点突出,调速方式可靠、稳定、实用,故被广泛应用于直流电机的调速系统中,可以实现对电机的精准调速。
1 系统总体方案设计
■1.1 系统性能设计
该电机调速系统可以实现电机启停、加减速、正反转功能。主要由主控芯片、显示模块、调速模块、测速模块等相关模块构成。
硬件电路部分主要采用STC89C52 单片机[1]和霍尔传感器等模块组成。软件方面的设计主要由可以实现电机调速、测速的C 语言所编写的程序构成。按下自锁开关,电路上电。当按下启动按钮时,单片机接收信号,通过驱动H 桥电路模块,来控制直流电机的运转,此时占空比为50%,电机运转正常,霍尔传感器测出电机转速,再将电机转速实时传送到LCD 并显示。调节加速按键,增加占空比,电机加速,通过LCD 可以实时显示,电机转速增大;反之,若调节减速按钮,则占空比减小,电机减速,实时转速减小。同理,若按下反转按钮,则直流电机由正转切换成反转,加减速同正转一致。若按下复位按钮,则电路恢复原状态,占空比恢复最初值50%,转速为0r/min。亦可在按下启动按钮前,预先设置好占空比。
直流电机调速系统总体方案框图如图1 所示。
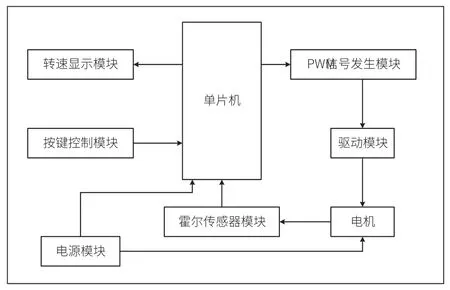
图1 系统总体方案框图
■1.2 各模块设计
1.2.1 主控芯片的选择
STC89C52 性价比高、易于开发,支持多种应用场景。考虑到STC89C52 广泛的应用,大范围的高稳定性,长时间的反复烧写寿命。根据系统需要选STC89C52 作为主控制芯片。
1.2.2 显示模块的选择
LCD1602 显示模块是一种字符型液晶模块,也是一种点阵型液晶模块[2]。它最多可以在同一时间显示32 个字符。LCD1602 可以显示简单的阿拉伯数字,也可以显示符号、字母。其由数个点阵字符位构成,需显示的字符与点阵字符位一一对应,且每位每行之间都存有间隙。LCD1602 价格低廉,且显示简洁清晰,体积小而轻便,便于携带学习,所以选LCD1602 作为显示模块。
1.2.3 调速控制模块的选择
本文采用由三极管组成的H 型PWM 电路。PWM 调制技术在工业控制领域得到广泛应用,可以实现高效节能,精确控制电机转速,提高机器的可靠性和运行稳定性。在家用电器中,PWM 调制技术也得到了广泛应用,如空调、风扇、电动工具等,可以实现电能的更加高效利用。
1.2.4 测速传感器的选择
众所周知,霍尔传感器受环境因素影响较小,且更具有实用性。霍尔传感器测速元件是基于霍尔效应而制成的一种传感器。本文所选用的A3144E 霍尔测速元件具备体积较小、灵敏度高、精确度高等优良性能。
2 硬件电路设计
硬件电路包括:STC89C52 单片机最小系统模块、按键模块、H 桥驱动电路模块、霍尔传感器模块、LCD1602显示模块。下面给出了各个模块的功能特性以及硬件原理图说明。
■2.1 主控芯片
STC89C52 单片机是一款成熟稳定、功能丰富的8 位单片机芯片。STC89C52 单片机具有高速、可扩展性强、易于学习等优点,是广泛应用于嵌入式系统、控制系统、通信设备等领域的理想选择。STC89C52 单片机的各项特性如下:
(1)CPU 架构:STC89C52 采用了Harvard 结构,在指令和数据总线上采用分离存储器构造,可以实现并行处理指令和数据,提高了单片机的执行效率。
(2)工作电压:STC89C52 工作电压为5V。
(3)总线速度:STC89C52 最大总线速度支持33MHz。
(4)存储器:STC89C52 具有8KB 的闪存存储器和256B的数据存储器。其中,闪存存储器可以进行擦写和编程,用于存储程序代码、数据、变量等信息;数据存储器可以存储中间结果、临时变量等数据。
(5)外设:STC89C52 具有20 个数字I/O 口、3 个计时器/计数器、一个串行通信接口等外设。其中,数字I/O口可以通过编程实现输入输出功能;计时器/计数器可以实现计时、计数、PWM 等功能;串行通信接口可以与其他设备进行串行通信。
(6)中断:STC89C52 有5 个可编程中断源,包括EXT、EXT1、TIMER、TIMER1 和TIMER2。中断可以提高单片机的执行效率,使单片机可以异步响应外界事件。
(7)电源管理:STC89C52 采用了低功耗设计,支持多种节能模式。同时,STC89C52 还具有自动切换电源、保护逆变器等保护功能。
(8)兼容性:STC89C52 可以使用STC-ISP 下载器进行程序下载、擦写等操作,同时还支持KEIL、IAR 等多个开发环境,方便开发者进行编程和调试。
单片机最小系统,或称最小应用系统,一般指用最少的元器件组成的以单片机为核心的工作系统。该系统主要由STC89C52 单片机核心芯片、晶振电路、复位电路组成[3]。STC89C52 单片机最小系统如图2 所示。
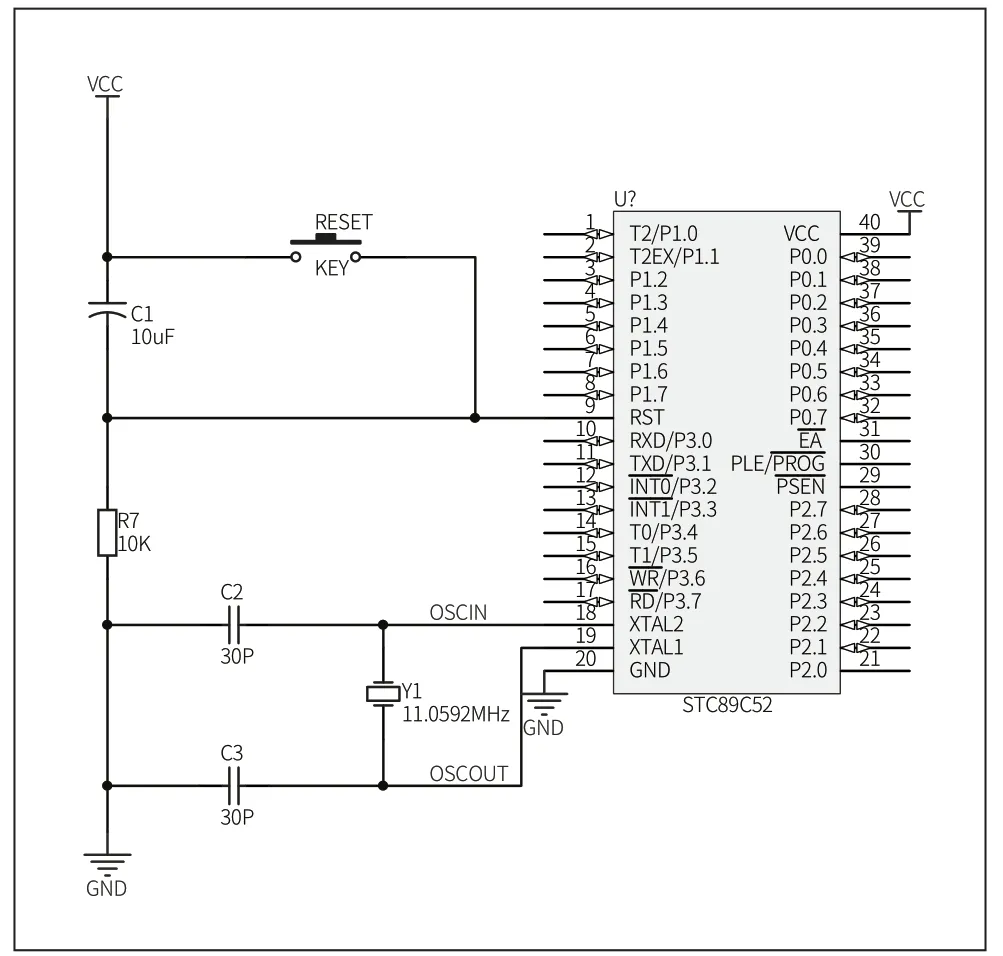
图2 STC89C52 单片机最小系统原理图
■2.2 PWM 信号发生电路模块
2.2.1 PWM 调制的基本原理
本文采用PWM(Pulse Width Modulation)调制技术进行调速。PWM 调速技术的原理是通过开关器件(如晶闸管、MOS 管等)控制输出电压的占空比,从而达到调节电机转速的目的。在PWM 信号周期内,将电源电压分成若干个等分的区间,开关器件接通时,输出电压等于电源电压,关断时输出电压等于零。在每个周期中,开关器件的状态变化次数称为调制频率,占空比则是开关器件通断时间比例。使电路中的三极管受控于单片机,可以实现对其占空比的状态进行控制,从而可靠地调节电机的转速。如图3 所示。
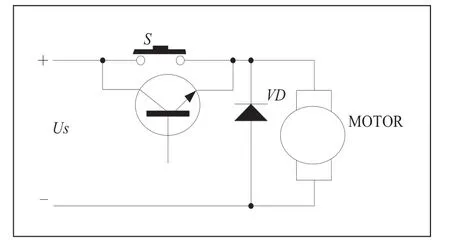
图3 PWM 控制示意图
电机两端可得到如图4 所示的波形。电压平均值为:
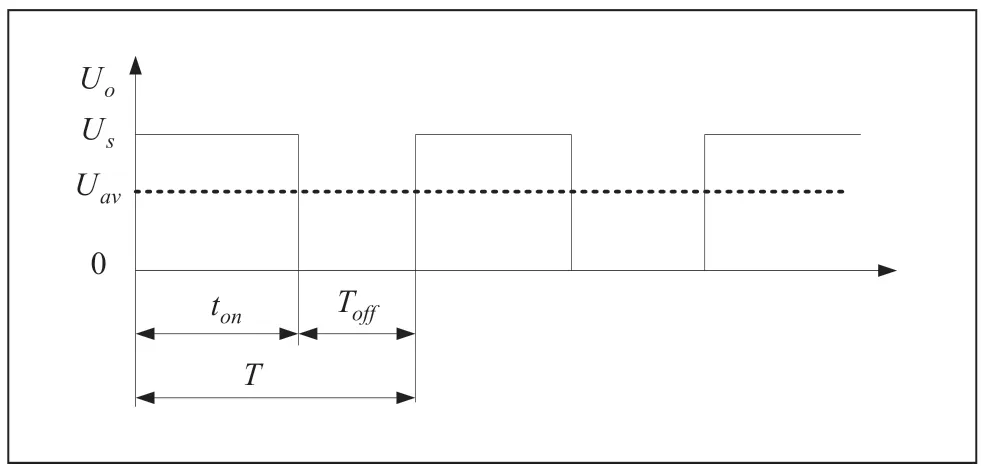
图4 PWM 控制产生的波形图
式中:ton—开关接通时间;T—开关通断周期;∂—占空比,
由上式可见:通过改变开关接通时间ton和开关通断周期T 之间的比值,使占空比发生改变。产生的波形如图4所示。
2.2.2 电机驱动电路的原理与分析
PWM 驱动电路模块是由4 个三极管组成,称之为“H 桥”驱动电路。电路中三极管的开关状态受控于单片机,其占空比是可调的,从而直流电机转速可以实现调节[4]。电机驱动电路如图5 所示。
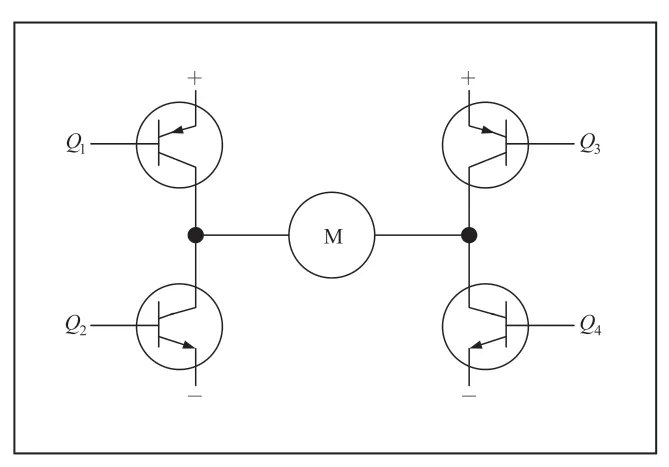
图5 电机驱动电路
2.2.3 H 桥驱动电路的设计方案
H 桥式驱动电路主要由二极管、三极管、直流电机组成,如图6 所示,为了调节电机的运转方向,只能给对角线上的一对三极管通电。这样,因不同三极管对通电的方式不同,流过电机的电流方向就不同,从而电机的转动方向得到改变。其中,NPN 型的三极管(Q1、Q2、Q3、Q6)输入高电平时导通,PNP 型的三极管(Q4、Q5)输入低电平时导通。
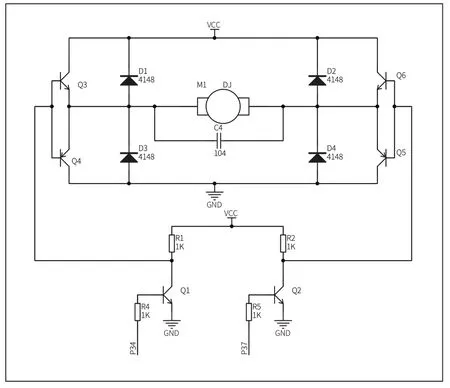
图6 H 桥驱动电路模块原理图
PWM 电机驱动电路的两个输入端分别接单片机的P34和P37,通过单片机产生的高低电平来控制晶体管的导通或截止。当Q1 和Q2 都导通或截止时,电机两端都接GND或Vcc,两端不能形成电压降,所以电机不工作。那么,只有当Q1 和Q2 处于不同的状态时,才能使电机正常工作,实现正转/反转功能。
■2.3 霍尔元件电路模块
2.3.1 霍尔传感器的内部结构
霍尔传感器元件内部结构比较简单,但是它能够实现精确、无接触、高清晰度的测量。内部结构如图7 所示。
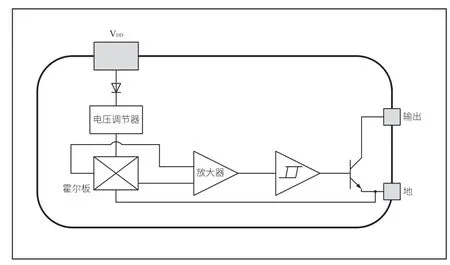
图7 霍尔元件内部结构
2.3.2 霍尔元件模块原理图
霍尔传感器有三个引脚,在具体电路中,1 号引脚接Vcc,2 号引脚接GND,3号引脚接单片机P3.3口,即 口。如图8 所示。
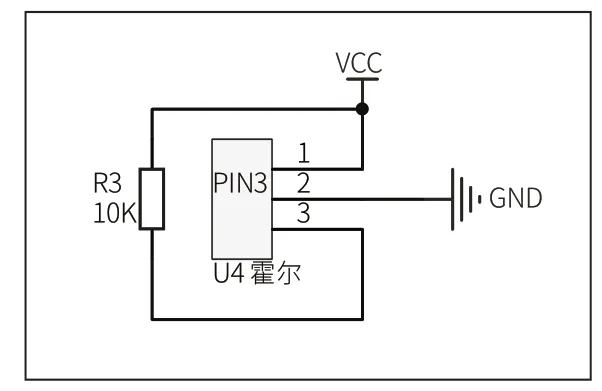
图8 霍尔测速模块
2.3.3 霍尔传感器测量原理
对于电机转速的测定,我们采用霍尔传感器测速的方式进行测量。霍尔传感器是一种基于霍尔效应的传感器,可以用来测量磁场强度、磁场方向、电流、电压等物理量。我们可以通过计数单位时间内的脉冲数,实现转速的换算。其基本的测量原理如图9 所示。
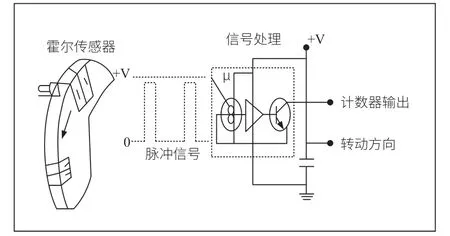
图9 霍尔器件测速原理
■2.4 LCD 显示模块
LCD1602 模块的原理图如图10 所示,引脚说明如表1所示。
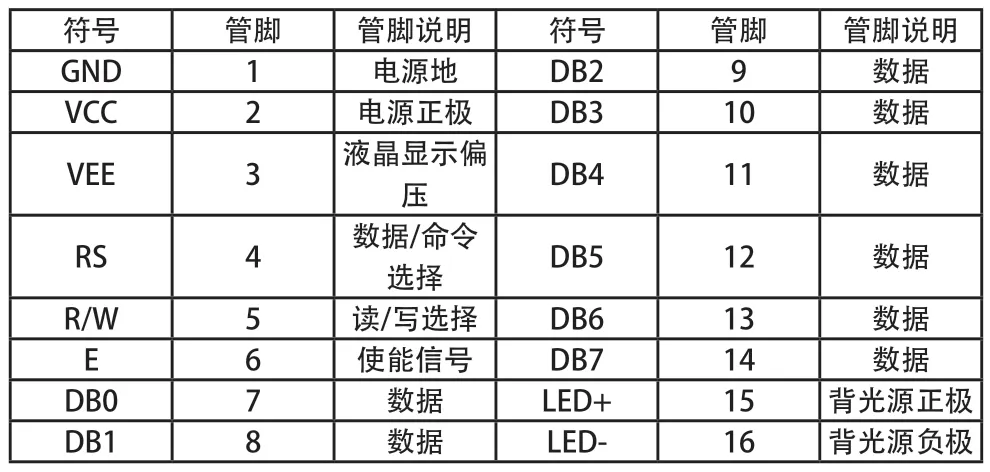
表1 LCD1602引脚说明
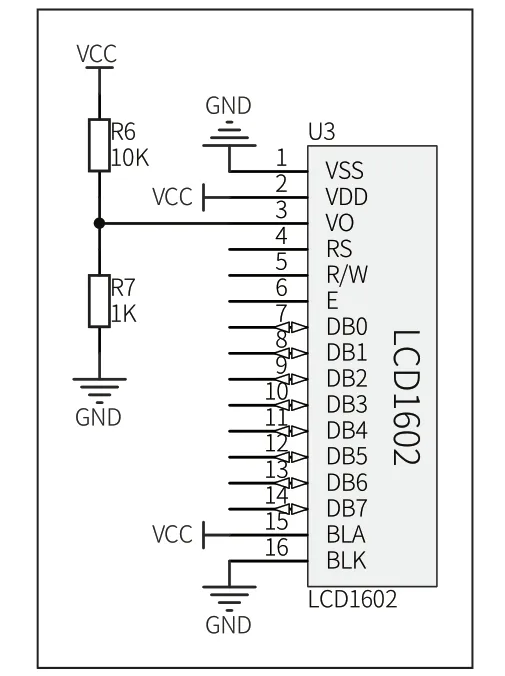
图10 LCD1602 模块原理图
3 软件程序设计
直流电机调速系统的软件设计分为三个部分:按键处理程序、定时中断程序和PWM 信号产生模块程序。
■3.1 主程序设计流程图
单片机控制电机的过程涉及硬件接口的配置、按键程序的设计、PWM 信号的产生和调节等多个方面[5]。系统主程序流程图如图11 所示。
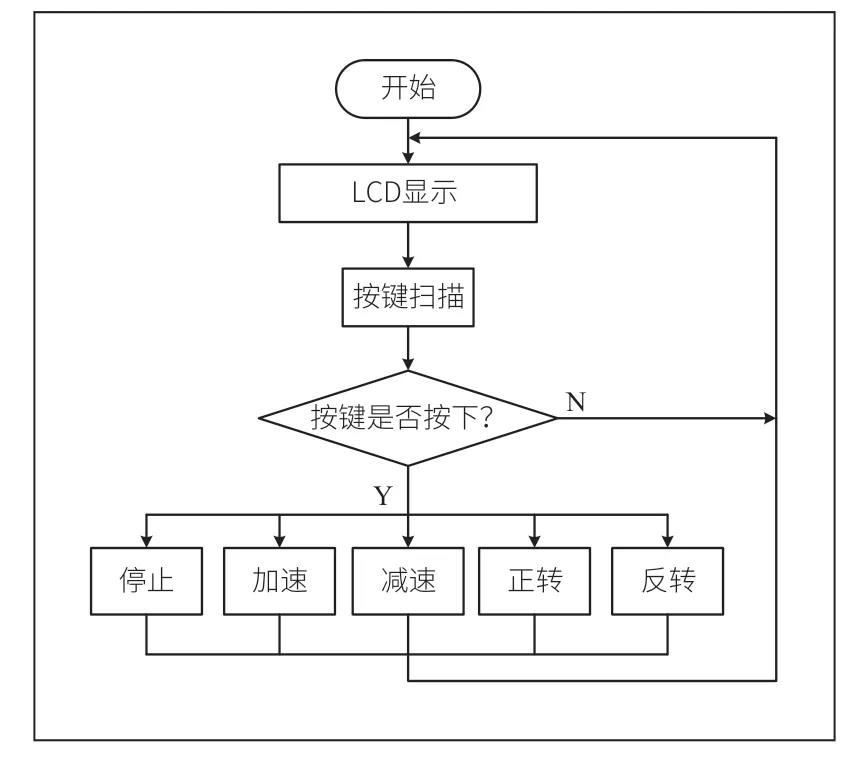
图11 系统主程序流程图
■3.2 按键程序设计流程图
首先,进行的是数据初始化,然后判断是否按键按下,通过检测按键是否按下的情况,来反映电机参数的变化。按键程序流程图如图12 所示。
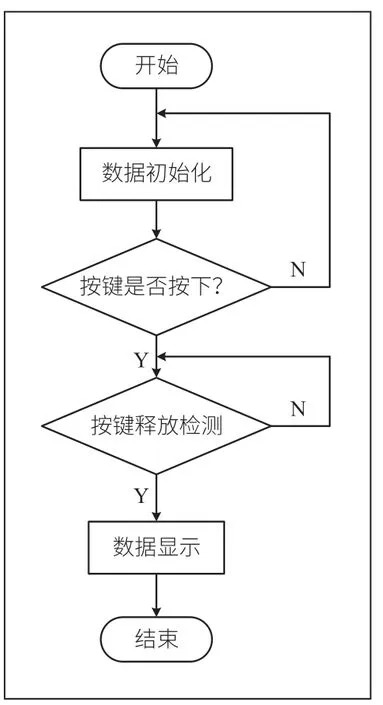
图12 按键程序流程图
■3.3 PWM 信号发生程序设计流程图
PWM 信号产生的方式是通过控制按键电路来调节占空比。脉宽调制流程图如图13 所示。
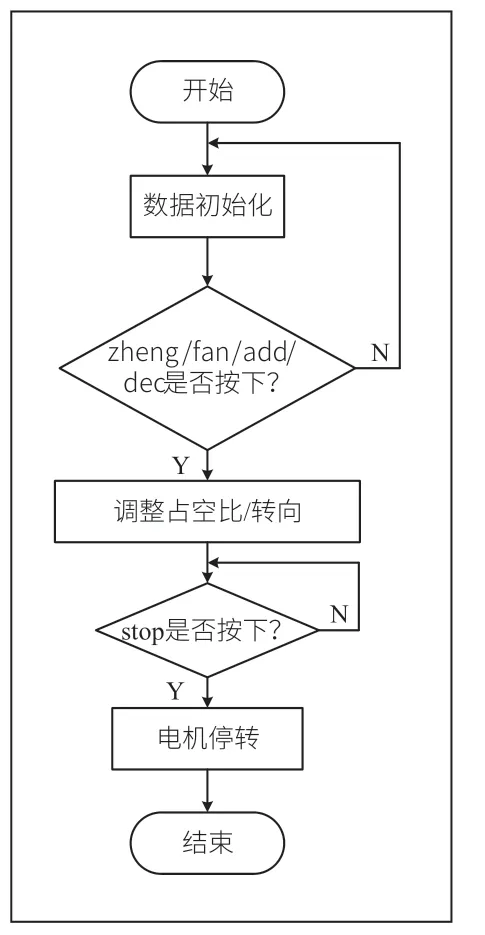
图13 脉宽调制流程图
■3.4 LCD1602 显示程序流程图
LCD1602 液晶显示屏可以实时显示占空比、电机转速两个重要参数。LCD1602 显示程序流程图如图14 所示。
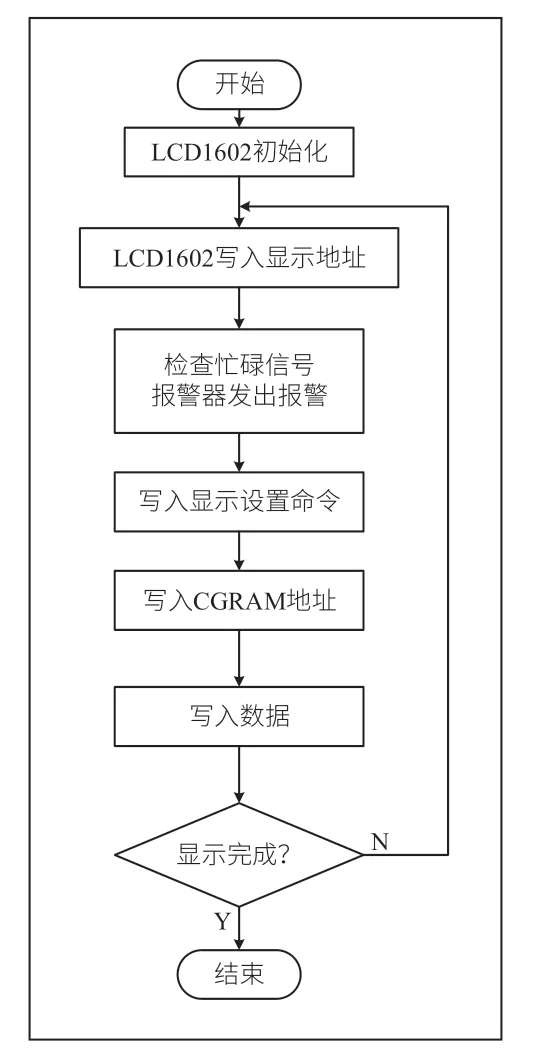
图14 LCD1602 显示程序流程图
4 结果调试
实验目的:通过按键,可以调节电机的启停、加减速、正反转。
霍尔测速:可以实现在电机运转的情况下测出电机实时转速。
显示:可以显示出电机的转速及占空比。
运行结果如下所示:
(1)当接上电源后,打开总开关后,LCD 工作正常,显示最初占空比为50%。实物图如图15 所示。
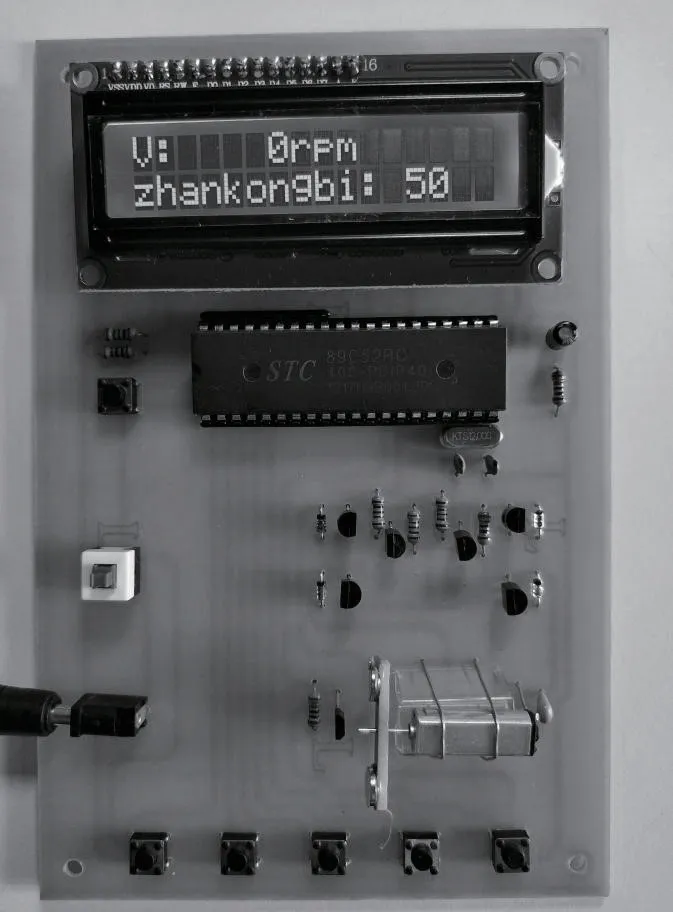
图15 初始状态图
(2)当按下启停按键后,电机开始运转,LCD 显示对应的占空比和转速。实物图如图16 所示。
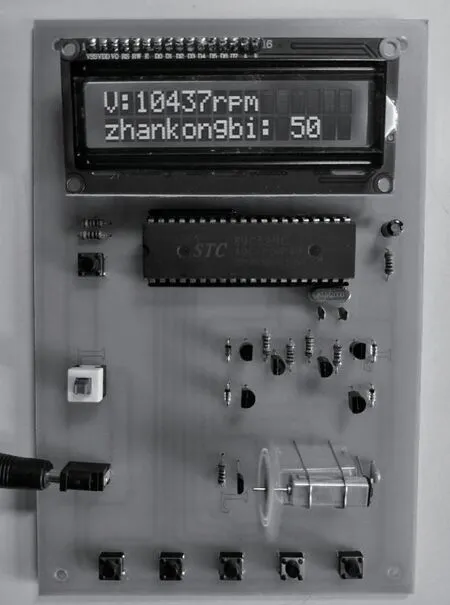
图16 电机运转图
(3)当增大占空比时,电机加速。实物图如图17 所示。
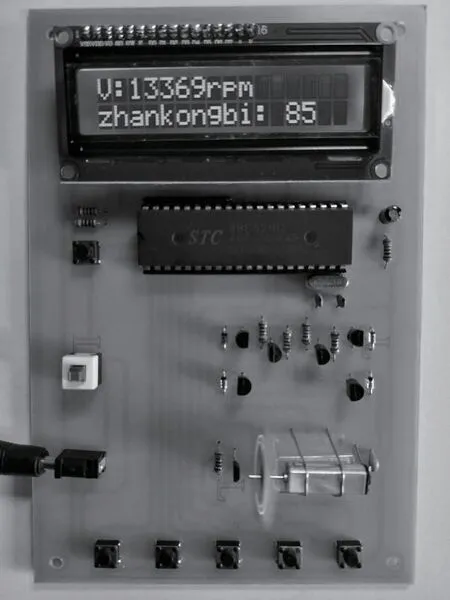
图17 电机加速运转图
(4)当降低占空比时,电机减速。实物图如图18 所示。
5 总结
本文介绍了基于STC89C52 单片机的微控制器,采用PWM 技术对直流电机进行调速,以霍尔传感器为测速元件的直流电机调速系统。在现实生活和工业生产中,电机无处不在,正常情况下电机应具备正、反转,加、减速等功能,于是用PWM 的方法实现调速。因51 系列单片机内部是不能直接输出PWM 信号,于是,我们使用定时器中断的方式,采用编程的方法,用程序来实现PWM 信号的输出。对精度要求不是很高的情况下而言,简单方便,而且正、反转的功能是通过H 桥电路电流方向的变化来实现的。利用这种方法实现地电路比较简单,且系统运行稳定。
猜你喜欢
大电机技术(2022年5期)2022-11-17
童话王国·文学大师班(2017年6期)2017-07-10
电子制作(2017年1期)2017-05-17
河南科技(2016年8期)2016-09-03
河南科技(2016年6期)2016-08-13
太空探索(2015年6期)2015-07-12
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
浙江共产党员(2014年12期)2014-07-10
世界科学(2013年6期)2013-03-11