两相交错并联双向DC-DC 变换器研究
2023-09-27 10:43石乐乐高昕
电子制作 2023年19期
石乐乐,高昕
(安徽理工大学 电气与信息工程学院,安徽淮南,232001)
0 引言
随着电子技术的不断进步,电动车、风力发电、太阳能等新能源设备的快速发展,越来越多的系统需要高效、稳定、可靠的直流-直流(DC-DC)变换器来满足其能量转换和能量管理需求。而交错并联双向DC-DC 变换器由于其高效能、高可靠性、低成本和多功能性等优点而被广泛应用[1]。
传统的双向DC-DC 变换器功率等级低且输出电流、电压脉动较大。交错并联双向DC-DC 变换器能允许能量双向流动的情况下降低输出纹波提高输出功率,交错并联双向DC-DC 变换器也具有灵活布局和快速响应的特点因此在新能源汽车、电网储能系统等应用中具有广泛的应用前景,已经成为研究和应用领域的热点之一[2~4]。
本文以双向半桥变换器为基础拓扑,进行交错并联得到两相交错并联双向DC-DC 变换器,该变换器拓扑所需元件少,不需电气隔离,采用电压、电流双闭环控制方式,均流效果好纹波小,且变换器在双闭环控制下具有良好性能。
1 变换器拓扑结构及原理分析
图1 所示为双向半桥DC-DC 变换器,该拓扑结构简易,仅需两个开关管、一个电感,并且不需要传输电容,对比其它变换器拓扑,双向半桥变换器的电压应力和电流应力均为最小。又根据导通损耗公式P=,ID为电流有效值,R为等效电阻,可知双向半桥变换器的导通损耗更小。
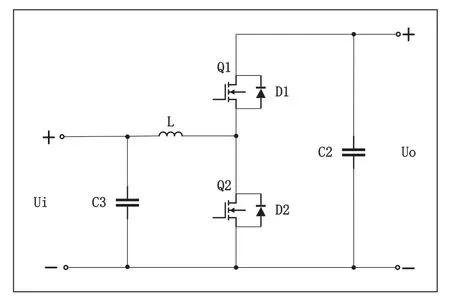
图1 双向半桥DC-DC 变换器拓扑结构
两相交错并联双向DC-DC 变换器拓扑结构如图2 所示,该拓扑是两个双向半桥变换器交错并联得到,该变换器开关管电流、电压应力小,导通损耗低,能够有效降低电流纹波。Q1~Q4是MOSFET 开关管其中Q1和Q3为降压管,Q2和Q4为升压管,D1~D4为相应开关管反并联的续流二极管,U1是低压侧,U2为高压侧,L1和L2为储能电感,C1、C2是滤波电容[5]。相邻桥臂开关管在每一周期导通时间相同,且两相相位相差180 度导通,该拓扑有Boost 和Buck 两种工作方式,本文以占空比D<0.5 为例分析其工作原理。
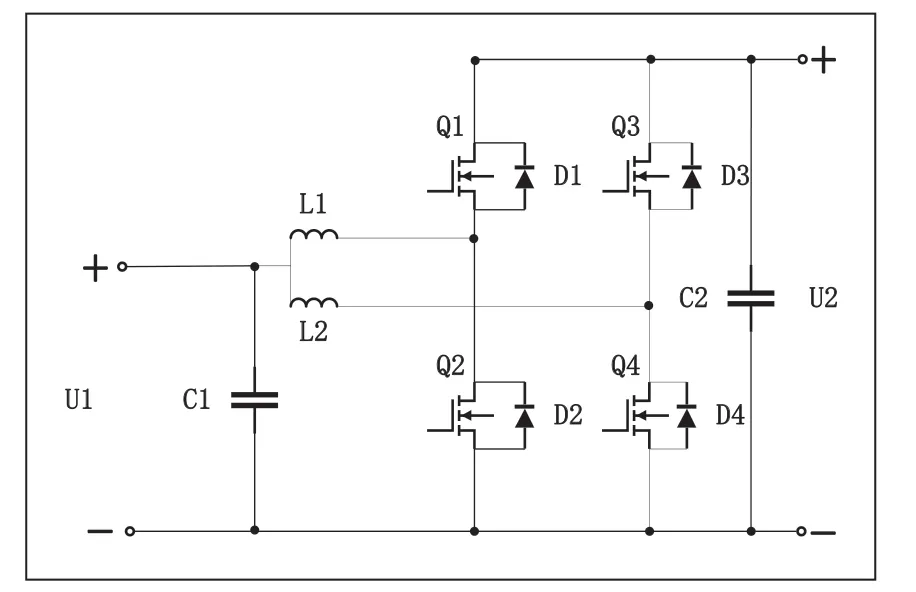
图2 两相交错并联双向DC-DC 变换器拓扑结构
■1.1 Buck 工作模式原理分析
当变换器处于Buck 工作模式下,能量由高压侧向低压侧流动,U2为输入侧,U1为负载侧,1Q、3Q作为降压开关管相位相差180 度导通,Q2、Q4处于截止状态,此模式下变换器有四个工作阶段,图3 详细给出了四个阶段的等效电路图和电流流向,其中加粗部分代表不同阶段电路的走向和电感电流流向。
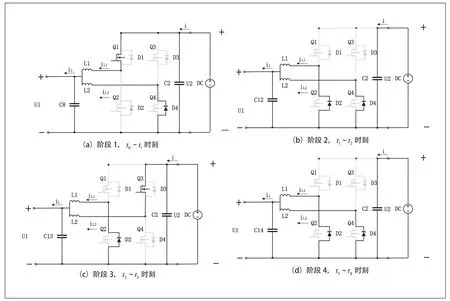
图3 Buck 模式下不同工作阶段等效电路
阶段1(t0~t1):t0时刻开关管Q1导通Q3关断,此时电感L1通过直流电源进行充电,iL1逐渐上升直至t1时刻结束;电感L2放电,iL2通过Q4反并联的二极管D4续流逐渐降低。总电流iL为两电感电流之和呈上升趋势。此阶段有(1)、(2)所示关系:
阶段2(t1~t2):t1时刻开关管Q1关断,电感L1放电,iL1通过Q2反并联的二极管D2续流逐渐降低;iL2通过Q4反并联的二极管D4续流继续降低直至t2时刻。总电流iL呈下降趋势。此阶段有(3)、(4)所示关系:
阶段3(t2~t3):t2时刻开关管Q3导通,此时电感L2通过直流电源进行充电,iL2逐渐上升直至t3时刻结束;整个阶段Q1关断电感L1放电,iL1通过Q2反并联的二极管D2续流逐渐降低,总电流iL呈上升趋势。此阶段有(5)、(6)所示关系:
阶段4(t3~t4):t3时刻开关管Q3关断,电感L2放电,iL2通过Q4反并联的二极管D4续流降低;电流iL1通过Q2反并联的二极管D2续流继续降低到t4时刻结束,总电流iL呈下降趋势,至t4时刻Buck 模式一个工作周期结束。此阶段与阶段2 的(3)、(4)关系式一致。
为简化运算,令开关管占空比均为D,电感L1=L2=L,根据电感的伏秒平衡以及图4 变换器工作波形Buck 模式下有关系式(7):
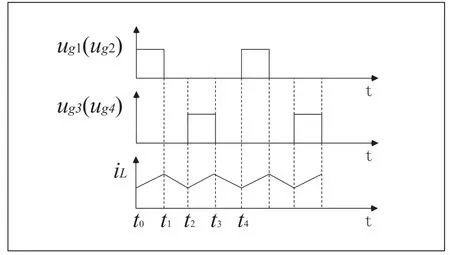
图4 两相交错并联双向DC-DC 变换器降压(升压)工作波形图
其中 1LiΔ 和ΔiL2分别是电感L1和电感L2的纹波,ΔiL为总电感电流纹波,AV是电压增益,T 为采样周期。
■1.2 Boost 工作模式原理分析
当变换器处于Boost 工作模式下,能量由低压侧向高压侧流动,U1为输入,U2为输出侧,Q2、Q4相差180 度交替导通,Q1、Q3关断。工作原理与Buck 工作模式一致,可简要概括为Q2导通、关断;Q4导通、关断。
令开关管占空比均为D,电感L1=L2=L,根据电感的伏秒平衡以及图4变换器工作波形,Boost模式下有关系式(8):
其中ΔiL1和ΔiL2分别是电感L1和电感L2的纹波,ΔiL为总电流电流纹波,AV是电压增益,T 为采样周期。
2 控制策略
电压单环控制由于只控制电压,不能同时控制电流,因此精度较低,容易出现误差且响应速度慢稳定性差。电压电流双环控制可以同时对电压和电流进行控制和调节,响应速度较快,可以大大提高控制精度,减小误差,能够适应不同场合并且双环控制稳定性好。对比分析选用控制效果更好的电压电流双环控制[6]。
电压电流双闭环控制系统结构如图5 所示,首先电压电流双闭环控制系统中包含了两个控制环节,即电压环和电流环。其次,电压环是外环,用于控制输出电压,而电流环是内环,用于将输出电流与给定电流进行比较,从而调节电压环的输出电压。参考电压与输出电压误差作为电压控制器的输入,电流内环的参考值则为电压控制器的输出,与采样电流比较,两者误差是电流控制器的输入,再将电流控制器的输出和输入的锯齿波送至脉宽调制器,控制PWM 脉宽调制器输出的占空比D 来控制开关管的导通和关断,最终实现电压外环电流内环的双闭环控制[7]。
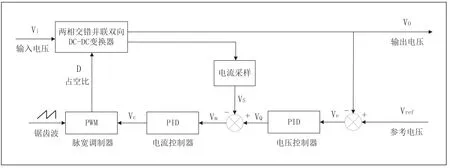
图5 电压电流双闭环控制系统结构图
3 仿真实验及分析
使用MATLAB/Simulink 软件搭建两相交错并联双向DC-DC 变换器仿真模型,先对两相交错并联双向DC-DC 变换器在双环控制下正常工作状态进行仿真分析,最后对变换器加以扰动分析动态响应特性。仿真模型所需参数如表1所示。
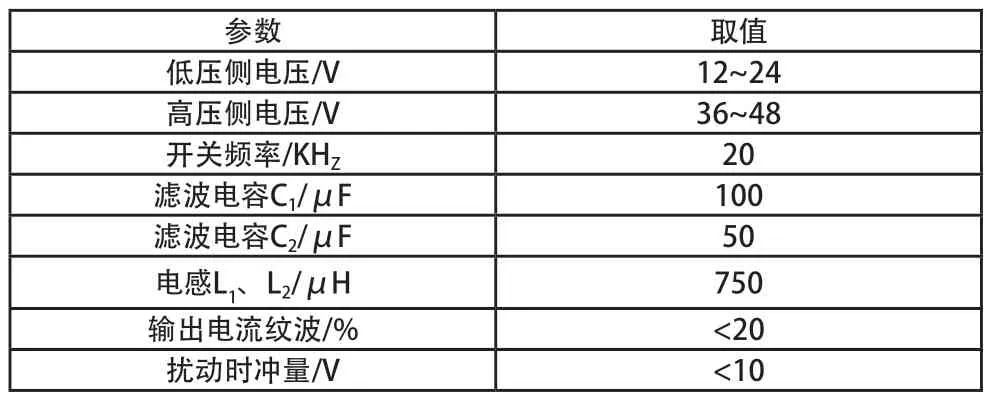
表1 仿真模型参数
■3.1 Buck 工作模式仿真与分析
Buck 模式正常工作状态仿真与分析(见图6、图7)。
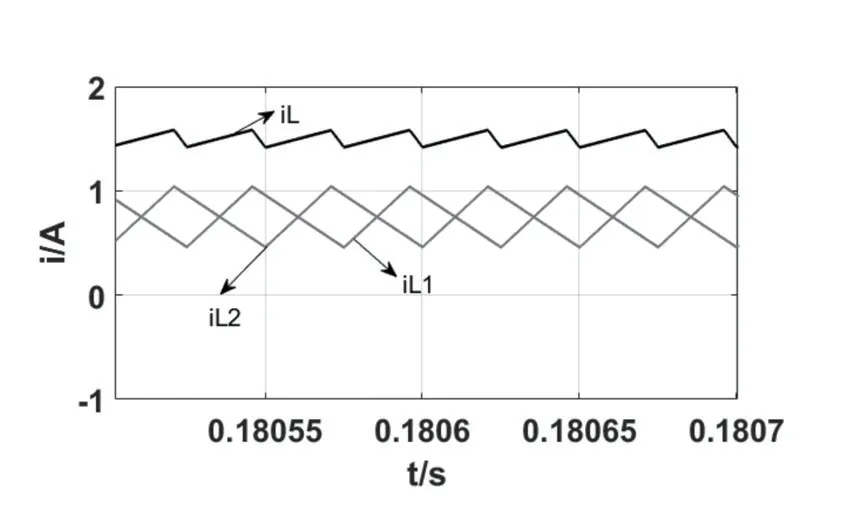
图6 Buck 模式下输出电流与单相电感电流波形
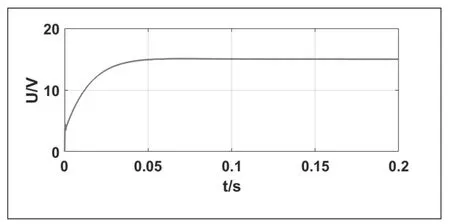
图7 Buck 模式下15V 输出电压波形
Buck 模式下输入36V 输出15V,两相电感电流iL1、iL2和总电感电流iL的输出波形如图6 所示,从波形图中可以清晰看出两相电感电流iL1、iL2大小相同,只是相位相差180 度,均流效果好,由于两相电感电流iL1和iL2相互交错所以能够对电流纹波起到抑制作用,从图中可看出总电流iL的纹波大小明显小于每一相电感电流,有利于输出电压的稳定,降低电路损耗,通过计算得到iL的平均值是iL1、iL2的两倍,能够增大变换器功率等级。图7所示为输出电压为15V 的波形图,由图7 可知当输出电压为15V 时,电压没有超调,0.05 秒左右达到稳态,变换器能稳定工作且响应速度快。
Buck模式变换器扰动状态下仿真与分析(见图8、图9)。
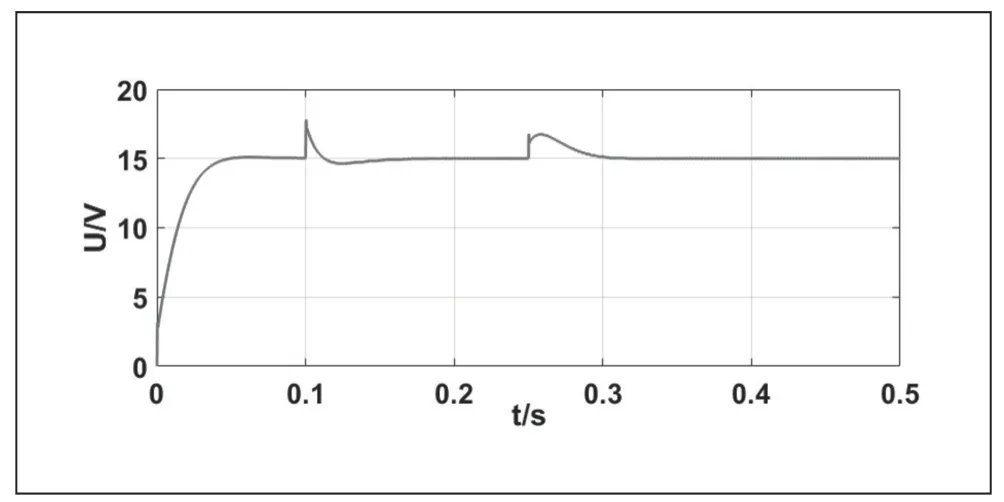
图8 Buck 模式扰动状态下输出电压波形
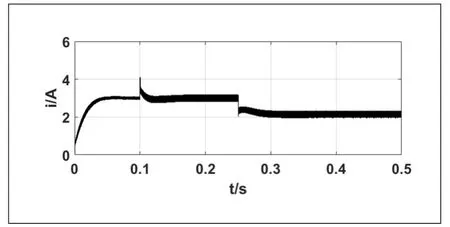
图9 Buck 模式扰动状态下总电感电流波形
在Buck 模式下给变换器添加两种扰动,输入电压突变和负载电阻突变,图8 是两种扰动下变换器输出电压波形,图9 是扰动状态下总电感电流iL波形。起始时刻变换器在0.05 秒左右稳定,0.1 秒输入电压36V 突变到48V 时变换器的输出电压有一个2.8V 左右的扰动冲量,调节时间约为0.04 秒,总电感电流的调节时间约为0.03 秒,稳定后通过计算电流纹波约为12.3%;在0.25 秒时负载电阻突变,此时输出电压有一个1.8V 左右的冲量调节时间约为0.05 秒。总电感电流调节时间约为0.04 秒,再次稳定后电流纹波约为17.2%左右。从仿真结果分析可知在双环控制下,变换器工作在Bcuk 模式下受到干扰时输出电压不会有很大超调,电流纹波也满足本文参数需求,有良好的动态响应特性,稳定性强。
■3.2 Boost 工作模式仿真与分析
Boost 模式正常工作状态仿真与分析(图10、图11)。
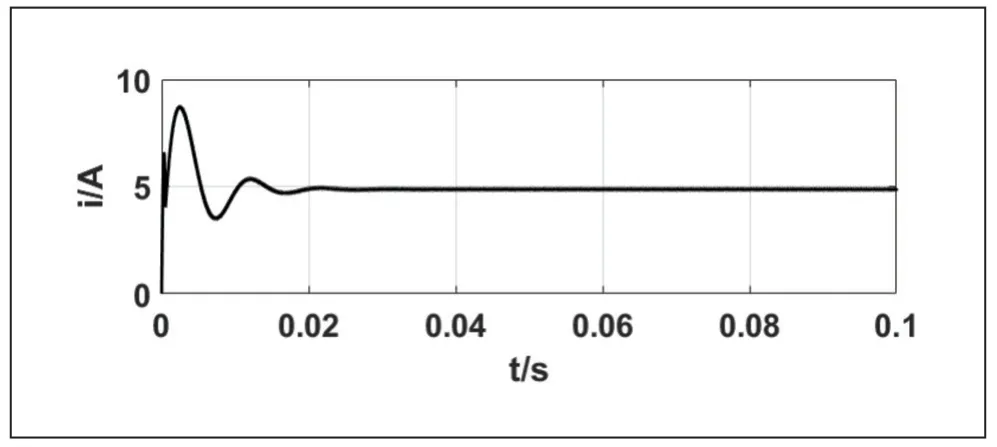
图10 Boost 模式下电感总电流波形
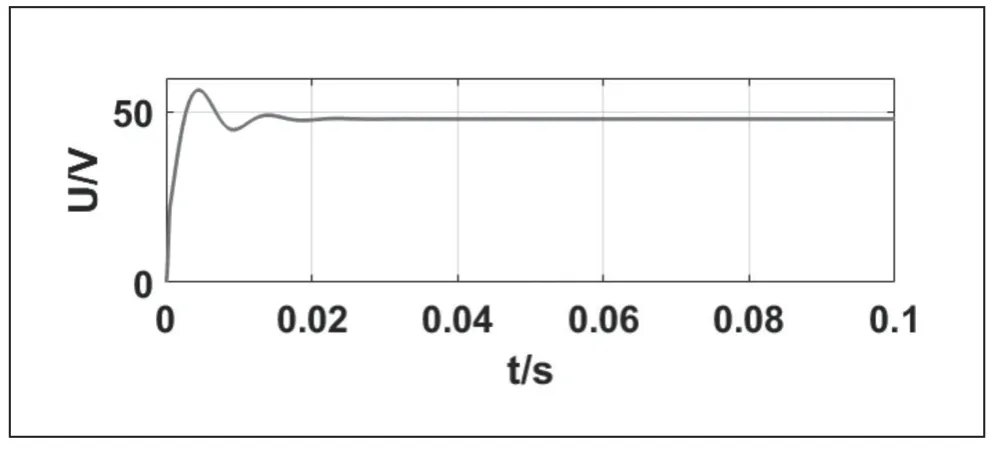
图11 Boost 模式下48V 输出电压波形
变换器工作在Boost 模式时两相电感电流的均流效果与Buck 模式基本一致。变换器输入电压为12V 输出电压为48V,图10 和图11 分别为该模式下总电感电流波形和输出电压波形,由图10 和图11 可知总电感电流在0.03 左右时达到稳定状态,输出电压在0.02 秒左右稳定,通过计算电流纹波约为2.6%,电压超调8.5V 左右,满足变换器工作要求。
Boost 模式变换器扰动状态下仿真与分析(见图12、图13)。
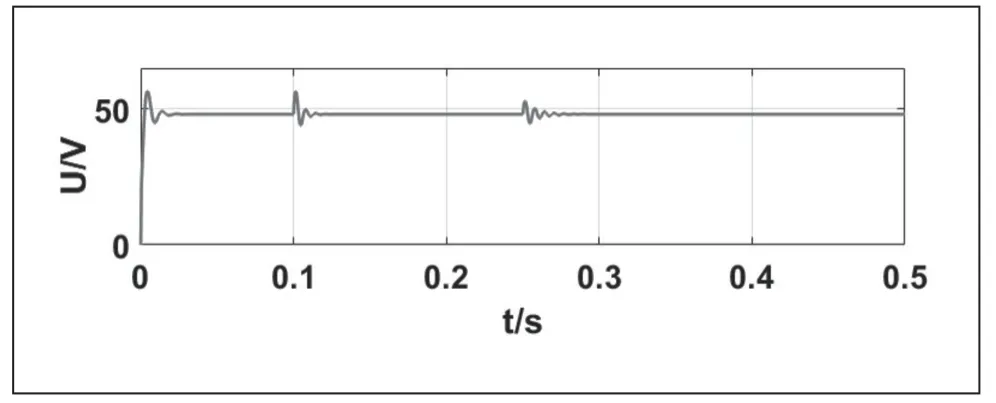
图12 Boost 模式扰动状态下输出电压波形
与Buck 模式一致给变换器加入输入电压突变和负载电阻突变两种扰动:由图12 和图13 可知,初始时刻变换器在0.03 秒左右稳定,0.1 秒当输入电压由12V 突变至24V时变换器的输出电压有一个8.5V 左右的扰动冲量,调节时间约为0.02 秒后稳定,总电感电流的调节时间约为0.025秒左右,稳定后电流纹波约为4.2%;在0.25 秒时负载电阻突变,此刻输出电压的冲量为4.8V 左右调节时间约为0.03秒,总电感电流调节时间约为0.03 秒,再次稳定后的电流纹波约为7.9%。从仿真结果分析可知变换器在双闭环控制下,变换器工作在Bcuk 模式受到干扰时输出电压超调也不大,电流纹波同样满足参数需求,该模式下也有良好的动态响应特性,抗干扰性强。
4 结语
双向DC-DC变换器在电源系统中具有重要的应用价值,本文从两相交错并联双向DC-DC 变换器的电路实现、工作原理和控制策略进行详细分析。通过理论分析和仿真验证,证明了两相交错并联双向DC-DC 变换器在双环控制下电流纹波较小、均流效果好具有较好的输出稳定性,且动态响应速度快,具有良好性能,可以满足不同电源系统的要求,为储能系统、混动汽车等应用背景的双向DC-DC 变换提供一种解决方案。
猜你喜欢
出版人(2022年11期)2022-11-15
莆田学院学报(2021年5期)2021-11-13
甘肃科技(2020年20期)2020-04-13
光源与照明(2019年4期)2019-05-20
电镀与环保(2016年3期)2017-01-20
电测与仪表(2016年1期)2016-04-12
通信电源技术(2016年5期)2016-03-22
电子器件(2015年5期)2015-12-29
电源技术(2015年1期)2015-08-22
电源技术(2015年9期)2015-06-05