基于5G 网络无人机的设计与实现
2023-09-27 10:42陈彦芳张雄李建辉李永权
电子制作 2023年19期
陈彦芳,张雄,李建辉,李永权
(东莞城市学院 智能制造学院,广东东莞,523109)
0 引言
当前世界上许多先进国家已经掀起了第一轮的5G 热浪,全球的5G 技术发展正驶入快车道。伴随着网络技术的持续与快速发展,5G 已成为服务大众、改变社会、促进经济社会发展的利器之一[1]。2018 年9 月,(5G)IMT-2020推进组、中国信息通信研究院等有关机构联合发布《5G 无人机应用白皮书》,从“无人机应用场景和通信需求”出发,全面阐述了5G 网 联无人机整体解决方案[2]。
随着5G 正式商用,中国移动通信相关部门在5G 互联网领域有着巨大的优势,将5G 技术与UAV 技术进行深度结合,搭建5G+无人机在工业物联网领域的完整体系,随着工业互联网的广泛运用应运而生,这将不断促进社会的进步和发展。
5G 网联无人机的相关建设方面,各大运营商都在抓紧布局,积极引入合作伙伴,开展云、端、网对接工作,构建多级5G 网联无人机合作伙伴生态圈。针对应急、公安、交通、城市管理等多个场景,与合作伙伴共同培养聚合能力、运营能力、协同能力。中国移动发布首款前装版无人机5G 通信终端“哈勃一号”,电信发布了首款无人机5G 机载边缘计算终端,联通发布了5G 无人机机载终端。虽然三者产品在价格、性能参数上略有差别,但是都在卡位5G 网联无人机的市场。同时,民营企业也在各自的赛道上积极转型,华为联合运营商积极拓展5G 网联无人机业务。大疆作为行业巨头已与中国移动、中国电信打通5G 通信终端对无人机的远基于5G 通信技术的无人机立体覆盖网络白皮书11 程控制及数据回传。垂起固定翼无人机企业成都纵横以及多旋翼无人机领军企业四川一电甚至已经与中国移动完成了5G 通信模块的前装及调试。
本文所研究的基于5G 网络的无人机,相较于传统的使用5.8GHz、2.4GHz 无线电频率进行图像传输和数据传输的无人机[3],能做到飞行范围广,视频高清,图传远,低成本高速率,而且不易受到干扰。无人机工作时连接到所处地的5G 信号覆盖的基站,通过无线网络上传数据和高清视频图像,并接收下载飞行数据等信息。在低延时高速率的5G蜂窝网络互联网控制下的无人机,相比传统的遥控器控制能飞得更安全更远,图像传输得也更远更清晰,甚至不受距离限制,在5G 信号所覆盖之处,所巡视的信息一览无余。本文获得的研究方法和创新点可以应用于街道巡视、城市管理、生态环境监测等场合,也对其他需要无人监控的应用场景有重要的研究价值和意义。
1 系统方案
无人机工作时,连接到所处的5G 信号覆盖的基站,通过无线网络上传数据和高清视频图像,并接收下载飞行数据等信息,理论上可以达到飞行距离不受限制,从而可以实现全球范围内部署运行。其主要实现的功能包括:无人机系统和5G 模块桥接连接上当地基站从而实现上网;用户可以通过5G 网络低延时控制无人机的飞行姿态;通过5G 网络传输实时高清视频图像直播;通过GPS、北斗、伽利略等多卫星精准定位实时反馈无人机所在位置;用户可以通过Android、IOS、MacOS、Windows、Linux 等等任何可以联网的设备控制,从而达到更高的兼容性、方便性的目的[4]。
系统设计框图如图1 所示,该系统由基于Arm 系列架构的树莓派zero 2w 作为主控模块,搭载日海智能SIM8202G 作为5G 模组,摄像头模组以OV5647 感光芯片为底板,采用基于8 位单片机Atmega2560 的ArduPilot作为开源飞控,并采用H303D 定位导航模块上报信息到SSD 云盘。

图1 系统设计框图
2 系统硬件设计
本无人机使用的是45 英寸四轴无人机F450 作载体,该机型已流传较久,配套方案齐全,方便搭载航拍拍摄设备,长轴臂适合放置5G 天线。硬件采用基于Arm 系列架构的树莓派zero 2w 作为主控芯片的核心板,主要由5G 模组供电电路、定位模块、摄像头模块等组成。
■2.1 主控系统设计
树莓派主控模块电路原理图如图2 所示。
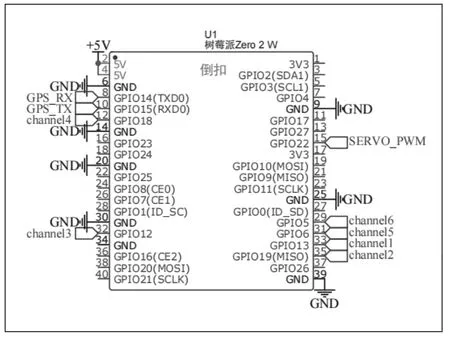
图2 树莓派主控模块
主控系统最佳工作环境电压是5V,峰值电流是3A。为了确保树莓派能达到最佳性能,PCB 板不得不调大线宽、线距和采用挖孔式设计并配备散热风扇。为了确保飞机良好的载重性能,配备了F450 机型最佳的动力系统:1045 桨叶+950kV 无刷电机+20A 电调+4S25C2600mAh 航模锂电池,4S 代表有4 块3.7V 的锂电池串联,总电压为14.8V,充满电电压为16.8V。电机空载时1V 电压下的转速是950转/秒,16.8V 电压时则是15960 转/秒,根据锂电池持续放电电流公式:
可得出本套动力系统持续放电的电流能达到65A,在最大载重时每个轴都能分配到16.25A,加上1047 寸大桨叶和20A 电子调速器的加持下,以确保足够的拉力。
■2.2 5G 模组供电电路
5G 模组采用了massive MIMO 天线技术,要比4G、3G 模组使用更多的天线,而且每根天线都有自己的功率放大器,这也带来了更大的功耗。表1 为课题所使用的SIM8202G 模组的电气特性表[5]。

表1 SIM8202G模组电气特性
因此5G 模组不能像4G 模组那样可以依赖树莓派上的USB 口供电了,否则这会拖低树莓派的电压,使树莓派欠压报警,影响主控性能后果不堪设想。所以需要采用一套稳定在4.4V 以内的大电流供电方案,这里使用的是带有MP1482 降压电路的转接板。
该电路可以持续负荷2A 大电流,具有极好的负载和线性调整率。可以在4.2~18V 环境下工作并具有短路保护、过流保护、欠压保护和过温关断保护。
■2.3 定位模块
图3 是定位模块通过串口协议的接线图,无人机位置信息上报采用的是H303D 定位导航模块,该模块是基于低功耗芯片AT6558D,即便是在地理环境复杂,卫星定位信号偏弱的地方都能实现精确定位,定位精度在5M 以内。支持串口、I2C、SPI 和USB 这几种通信协议。天线采用的是陶瓷天线和LAN 芯片,串口默认波特率为9600,模块默认以串口形式发送数据。上位机也可通过串口协议连接,对定位模块进行参数调节。

图3 定位模块接线图
H303D 定位导航模块默认是使用NMEA 0183 协议的,发送的数据帧头一般如表2 的格式。
将使用的是数据帧以 “$GPRMC”开头的定位报文。根据NMEA 0183 协议格式从该定位报文中提取当前的坐标经度纬度。
■2.4 摄像头模块
摄像头模组以OV5647 感光芯片为底板,可达2592×1944 分辨率。采用CSI(相机串行接口)接口与树莓派通信,通过数据差分信号传输视频中的像素值。CSI 接口可以灵活地根据相机的阵列自动调整线差分时钟线和差分数据信号的组数来实现摄像头数据传输。如此能减少树莓派CPU 的负载,也可以提高传输速率,即使是大阵列的CCD 相机也能满足数据高速传输的要求。
同时也集成了CCI(相机控制接口),能广泛兼容现有处理器的I2C 接口从而实现主设备对从设备的控制。CSI 摄像头接口图如图4 所示。
3 系统软件设计
■3.1 总体软件设计流程
软件功能流程图如图5 所示。控制端网页主要采用GitHub 上开源框架network-rc[6],该框架由后端语言Node.js 编写,node.js 是一个能运行在服务器端的JavaScript 开源代码。Node 采用谷歌开发的V8 引擎运行js 的代码,具有轻量和高效的特性。常用于搭建易于扩展和响应速度快的应用。一般的网页都是上发给访问客户,最终在客户端浏览器上运行,但node.js 是在所挂载它的树莓派系统上直接运行,所以可以直接进行对树莓派操作。

图5 软件功能流程图
浏览器端和服务器端通过在单个TCP 连接上进行全双工通信的一种协议websocket 来实现飞行数据和位置信息交互,一次握手就可以持久连接并进行双向传输数据。该协议也被很多聊天小程序所使用的。图传视频的视频流主要由ffmpeg 工具压缩成h264 格式后通过网页实时通信webrtc的API 传输,在浏览器上只需要提前将JavaScript 配置完成就能实现实时音视频通讯。
■3.2 5G 模组配置
5G 模组上网配置流程如图6 所示。5G 模组上网形式是采用RNDIS(网络驱动程序接口规范)拨号上网,基于USB 上实现RNDIS 实际上就是TCP/IP over USB,就是在5G 模组上运行TCP/IP,让5G 模组看上去像一块网卡,采用模组开发公司芯讯通配套的Linux 内核文件,下载并编译内核驱动使用。因为每次关电源后启动没有记忆功能,都要重新配置RNDIS 拨号,所以要配置开机自启动脚本。

图6 5G 模组上网配置流程
■3.3 定位功能流程
定位流程如图7 所示,采用双模组定位,m8n 定位模块负责飞控的定位和航向规划,m6n 定位模块负责给网页控制端提供位置信息,因为定位模块发送的信息报文是基于NMEA 协议,所以通过Python 语言编写位置NMEA 协议数据处理脚本,树莓派通过串口读取,将定位模块发出的经纬度报文(WGS84 格式)最终转换成高德地图使用的加密方案火星坐标系(GCJ02 格式),并通过高德地图API 上发,最后在树莓派开机自动运行的系统脚本文件里面添加执行该Python 文件的命令,达到树莓派系统开机便可自动启动该文件的目的。
其中定位模块报文树莓派端口接收处理的部分代码如下:
4 系统功能测试
无人机的整体实物图如图8所示,为其设计的单轴缓冲防抖云台3D 设计图如图9 所示。

图8 无人机整体实物图

图9 单轴缓冲防抖云台3D 设计图
设计完成后,测得整机重量达1720g,几乎达到了F450 机型的极限载重,原本采用的大疆980kV 的2212 无刷电机配9450自锁桨,但是拉到极限油门也无法使飞机离地。后来采用950kV的2216 无刷电机配1047 自锁桨,采用4S 锂电池,单个电机的极限拉力能达到1100g。如此飞行器的安全极限可根据以下公式:
W=F(单个电机极限拉力)×轴数×2/5 式(2)
可得到飞行器安全极限载重1760g,故而可以实现起飞。
由于本次项目设计与个人搭建直播平台有一定的关系,因此域名备案在工信部审核中很难通过,这导致了无法在浏览器上输入域名便能访问。最后只能使用公网IP 地址+端口形式访问。
配置好内网穿透后,浏览器可以正常访问frp 流量监控,但是发现无法访问映射出的树莓派8080 端口,于是打开穿透日志打印发现若配置了域名那必须用域名格式访问http,但是域名目前还没备案成功,所以浏览器无法显示。后来改为固定IP 访问,便可成功访问。
所选用的SIM8202G 的5G 模组是自带一个GNSS 定位的,但最后还是选择了H303D 定位模块定位,因为经过多次测试发现5G 模组开机启动到稳定所需的时间比较长,其上面的GNSS 定位也同样需要一定时间才能稳定下来,为了快捷本次课题设计采用的是单独的定位模块提供定位信息。
树莓派运行的Linux 系统可以使用minicom 串口工具通过树莓派串口发送AT 指令读取并配置模组的状态,用WWAN0(5G 模组接入后的网口)ping 通所租的腾讯公网云服务器延迟大约都在30ms。图10 是目前所在地深圳城中村的5G 网络测速图。
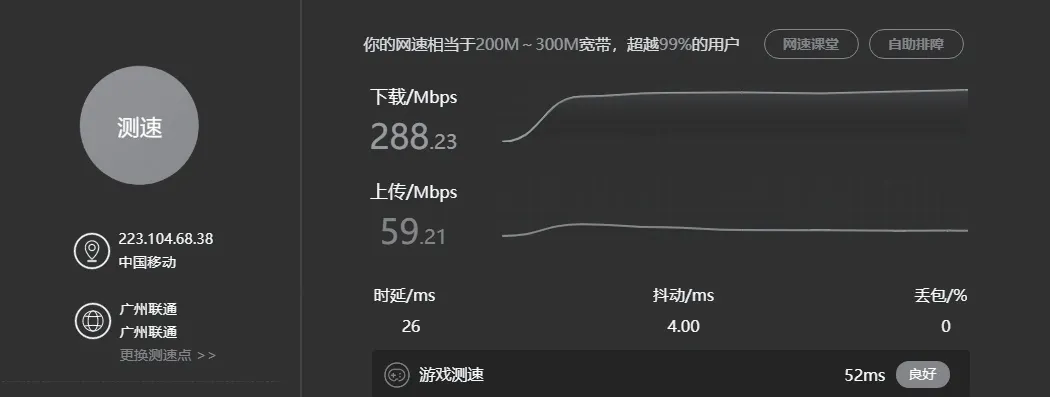
图10 5G 模组测速图
配置好内网穿透后两端后,连上监控可以看到内网的TCP 和HTTP 协议已经穿透成功。只要在用户端设备访问该域名的80 端口,就会跳出树莓派的网页端口。frp 流量监控页面如图11 所示。

图11 frp 流量监控页面
由于5G 信号波的波长是比4G、3G 的要短的,穿透能力自然也不如人意,因此到目前为止有些地方5G 信号仍然未覆盖,在城中村测试的时候,有时会出现延迟,只能通过自组网起飞。仔细观察5G 信号塔的信号发射装置方向其实是朝下的,这也会比较影响5G 无人机的飞行高度。高德定位地图如图12 所示。

图12 高德定位地图
在树莓派上安装并配置好Python 3 环境后,执行sudo Python3 gps.py 语句系统便自动运行定位模块报文处理并上传到高德地图API 文件,冷启动后时间过了一会儿,定位模块搜索到卫星,定位成功,在城市环境实测误差范围在10m以内,满足使用需求。客户端浏览器工作界面如图13 所示。

图13 客户端浏览器工作界面
5 总结
传统无人机需要较高的成本来实现视频实时图像传输一对多端的功能,随着5G 技术的飞速发展,引入5G 网络的无人机可以轻松实现该功能,无论身处何方,只要能连上互联网,都能即时观看到5G 无人机传出来的实时高清画面,并且还能远程控制无人机飞行姿态。这无疑降低了户外工作人员高空作业的安全风险,而且也会使巡检效率得到显著提高。本文设计实现的基于5G 的无人机,经证实可以解决传统无人机的问题,并应用于环境监控,长距离的电网巡查、远距离物资输送、违章建筑查处、高清直播、协助疫情防控等领域。
目前有些地方还存在信号覆盖不到的问题,这在一定程度上限制了5G 网络信号传输在这个领域的应用。但伴随着我们国家新基础建设战略的不断推进,5G 蜂窝网络信号覆盖率低的问题也会逐渐得到解决。无人机在5G 的推动下势必会如虎添翼,逐渐走进千家万户的视野。
猜你喜欢
装备制造技术(2020年11期)2021-01-26
电子制作(2019年12期)2019-07-16
电子制作(2019年11期)2019-07-04
电子制作(2018年8期)2018-06-26
电子制作(2017年17期)2017-12-18
电子测试(2017年11期)2017-12-15
通信电源技术(2016年5期)2016-03-22
中国酿造(2016年12期)2016-03-01
地矿测绘(2015年3期)2015-12-22
机械制造与自动化(2014年1期)2014-03-01