动车组车尾保持场景的深度分析和优化建议
2023-09-27 11:00:26徐华沙张超凡
铁路通信信号工程技术 2023年9期
徐华沙,张超凡
(1.中国国家铁路集团有限公司驻成都安全监督管理特派员办事处,成都 610081;2.中国铁路南宁局集团有限公司南宁电务段,南宁 531000)
南宁动车所至南宁东站方向咽喉区3 条动走线分别设置有10 m 长的轮对踏面诊断设备(简称轮对诊断区),该区段限速15 km/h,长度40 m,而车组从股道发车至该区段限速为30 km/h。根据《CTCS-3 级列控车载设备技术规范(暂行)》(铁运[2012]211 号)中5.7 和7.4.3.3 节对最限制速度曲线计算和速度监控的规定,装备300T、300S 型ATP 车载设备动车组进入该区段会进行降速,而经过该区段后限速条件为30 km/h,故车组在经过该区段后会进行车尾保持处理。本文结合实际案例深入分析300S、300T 型ATP 车载设备对车尾保持的不同处理逻辑,同时对南宁动车所轮对诊断区后的应答器位置设置提出优化建议。
1 运行场景
重联动车组11G 发车,车组走行距离为35 m时,经过编号为4184 的应答器组(出站信号机外方第一组应答器),预告前方4 段速度变化信息:1)前方20 m 开始限速30 km/h(即车组走行距离为35+20=55 m 处),限速区段长度468 m。2)前方523 m 开始限速15 km/h(即车组走行距离为35+20+468=523 m 处),限速区段长度40 m(即轮对诊断区)。3)前方563 m 开始限速30 km/h(即车组走行距离为35+20+468+40=563 m 处),限速区段长度182 m。4)前方745 m 开始限速40 km/h(即车组走行距离为35+20+468+40+182=745 m 处),限速区段长度2 545 m,如图1 所示。

图1 4184应答器组速度区段信息Fig.1 Speed restriction section information of balise group 4184
列车经过编号为4101 的应答器组(越过轮对诊断区进入区间第1 组应答器)时车组走行距离为954 m,预告前方2 段速度变化信息:1)限速40 km/h,限速区段长度3 130 m。2)限速80 km/h,限速区段长度1 465 m,如图2 所示。
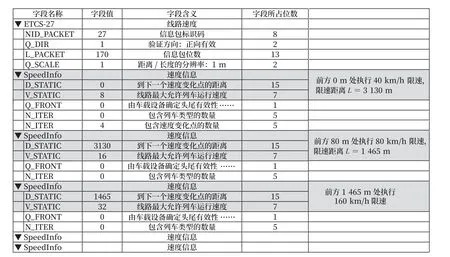
图2 4101应答器组速度区段信息Fig.2 Speed restriction section information of balise group 4101
2 处理逻辑对比
结合应答器信息对300T、300S 型ATP 车载设备重联车组执行车尾保持动作的不同处理逻辑进行对比,如图3 所示。
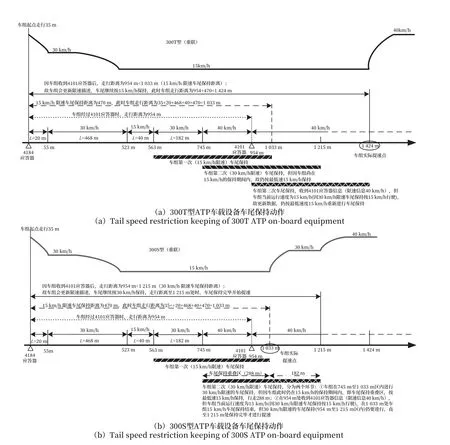
图3 300T、300S型ATP车载设备车尾保持对比(重联车组)Fig.3 Comparison of tail speed restriction keeping of 300T and 300S ATP on-board equipment (Recoupled trainset)
300T、300S 型ATP 车载设备在以下方面处理逻辑一致。
1)车组由低速区段进入升速区段时,按最不利限速曲线(MRSP)计算车尾保持。
2)车尾保持长度为车长420 m(重联车组长度)+50 m(安全距离)=470 m。
3)车尾保持期间,若经过应答器收到新的限速描述(静态限速SSP、临时限速TSR),由于CTCS-2 系统中应答器数据采用覆盖式更新(即直接采用更新后数据,不检查与之前既有数据的一致性),则根据新限速数据重新计算MRSP 时要考虑应答器数据更新之前的限速值。若更新之前的限速值低于更新后的应答器描述限速值,则进行车尾保持,保持的长度仍是车长420 m(重联车组长度)+50 m(安全距离)=470 m。由图3 看出,车组在走出最低限速15 km/h(L=40 m)后进入提速区段(30 km/h,L=182 m),300T、300S均按MRSP 进行车尾保持。两者车头走出限速为15 km/h 区段并进行车尾保持后的走行距离均为:35+20+468+40+470=1 033 m。
300T、300S 型ATP 车载设备在车尾保持期间的限速更新有不同的处理逻辑。
1)对于4184 应答器组中第3 条静态速度的处理
a.300T 型车载设备处理逻辑:因该限速区段仍在4184 应答器第2 条静态速度描述的15 km/h车尾保持期间(30 km/h 起点为563 m 处,15 km/h车尾保持结束点为1 033 m 处),则其虽对新限速数据重新计算MRSP,但因之前的限速值(15 km/h)低于新限速值(30 km/h),则MRSP 仍按最低速度(15 km/h)进行车尾保持,即忽略更新限速。
b.300S 型车载设备处理逻辑:车头走出限速为15 km/h 区段(L=40 m)后,对新限速数据重新计算MRSP,但之前的限速值(15 km/h)低于新限速值(30 km/h),则MRSP 按最低速度(15 km/h)进行车尾保持。当车头走出限速为30 km/h 的区段(L=182 m)后,将同步进行两个车尾保持处理,其一为15 km/h 限速剩余的车尾保持距离(1 033-745=288 m),在该区段内车组按最低速度(15 km/h)运行;其二为开始进行30 km/h 限速的车尾保持。对新限速数据(4184 应答器组中第4 条静态速度描述)重新计算MRSP,因之前的限速值(30 km/h)低于新限速值(40 km/h),则MRSP 按最低速度(30 km/h)进行车尾保持。图3 中15 km/h 和30 km/h 车尾保持的过程中有一段288 m 的重叠区,取最低限速(15 km/h)进行车尾保持。在车组走行至1 033 m 处时,15 km/h 车尾保持结束,车组继续按30 km/h 进行车尾保持,故车组提速至30 km/h。
2)4101 应答器组中第1 条静态速度的处理
a.300T 型车载设备处理逻辑:在收到4101应答器组描述的40 km/h 报文处,仍在4184 应答器第2 条静态速度描述的15 km/h 车尾保持期间(40 km/h 起点为954 m 处,15 km/h 车尾保持结束点为1 033 m 处)。则其虽对该新限速数据重新计算MRSP,但因之前的限速值(15 km/h)低于新限速值(40 km/h),则MRSP 按最低速度(15 km/h)重新进行车尾保持。在行至1 424 m处954+470=1 424 m 处时车尾保持结束,车组开始提速至40 km/h。
b.300S 型设备处理逻辑:车头走出限速为30 km/h 区段后,行至954 m 处收到4101 应答器描述的40 km/h 报文,此时车组仍在15 km/h 和30 km/h 的车尾保持期间。对新限速数据重新计算MRSP,仍按最低速度(15 km/h)进行车尾保持;行至1 033 m 处时,车组15 km/h 车尾保持结束,但此时车组还在30 km/h 的车尾保持期间,故限速提至30 km/h;行至1 215 m 处时,车组30 km/h车尾保持结束,车组开始提速至40 km/h。
由以上分析可知,300S 型车载设备在收到新限速描述后升速区段的车尾保持是同时进行计算的。300T 型车载设备在收到新限速描述后,若升速区段在前一段低限速的车尾保持期间,则仍按前一段低限速重新进行车尾保持。两者对比,在本案例中升速点相差1 424-1 033=391 m。
3 改进方案
结合上述分析可知,两种设备执行车尾保持动作期间接收到同一组应答器信息后,实际提速位置不同,在本案例中300T 型设备相较于300S 型设备要“多”走行391 m 才进行提速。有以下3 个建议改进方案。
3.1 方案一
两种设备对于车尾保持的处理逻辑虽不同,但均依据《CTCS-3 级列控车载设备技术规范(暂行)》(铁运[2012]211 号)文件5.7 节和7.4.3.3 节对最限制速度曲线计算和速度监控的规定中对车尾保持的处理逻辑没有给出具体的约束要求,故不同厂家间会有所异同。而从运输效率来看,300S 型车载设备对于不同限速的车尾保持处理是同时进行计算的,能够较快执行限速条件,效率会更高。300T 型车载设备对车尾保持处理虽进行了更严格的约束,但对运输效率会有一定影响,如本案例中4184 应答器组中第3条静态速度30 km/h 的限速条件对于该型设备而言“形同虚设”。故改进方案一是参照300S 型车载设备对车尾保持的处理逻辑,修改300T 型车载设备车尾保持逻辑,使两者一致。
3.2 方案二
修改地面应答器信息。在本案例中4184 应答器组中第3 条静态速度30 km/h(L=182 m)的限速条件,300S 型设备实际执行起点为1 033 m 处至1 215 m 处结束,而300T 型设备未按预期报文执行。故可考虑将4184 应答器组中第2 条静态速度15 km/h(L=40 m)与第3 条静态速度30 km/h(L=182 m)信息合并修改为静态速度15 km/h(L=222 m),同时将4101 应答器组中第1 条静态速度40 km/h(L=0 m)修改为静态速度40 km/h(L=79 m)。目的主要是为避免300T 型设备的第3 次车尾保持,而将其提前至1 215 m 处(比之前提早1 424-1 215=209 m),如图4 所示。

图4 改进方案二Fig.4 Improvement plan II
3.3 方案三
修改地面应答器信息。将4184 应答器组中第3 条静态速度30 km/h(L=182 m)信息与第4 条静态速度40 km/h 信息进行合并,统一修改为限速40 km/h(L=2 727 m),同时将4101 应答器组中第1 条静态速度40 km/h(L=0 m)修改为静态速度40 km/h(L=79 m)。目的是为避免300T 型设备的第3 次车尾保持,而将其提前至1 033 m 处(比之前提早1 424-1 033=391 m)。修改后两种设备实际提速点可归为一致,均为1 033 m 处,如图5 所示。

图5 改进方案三Fig.5 Improvement plan III
3.4 改进方案优缺点比较
方案一:只在车载设备侧进行改进(修改软件),不涉及地面设备,相对操作比较简单。但文中所提及的场景并非普遍存在,且修改ATP 设备软件需经过非常严格的调研审批、试验认证等环节,周期长、耗费人力物力大,故修改软件可能性很小。方案二:修改后两种设备实际提速点(40 km/h)可归为一致,均为1 215 m 处。且1 215 m 处之后地面设备满足40 km/h 的走车条件(修改前300S 型提速至40 km/h 起点即为1 215 m 处)。但修改前300S 型设备在1 033 m 处至1 215 m 处区段内第一次提速为30 km/h 将走行182 m,而修改后运行速度将变为40 km/h,且实际提速点后移(1 215-1 033=182 m),如图4 所示。方案三:该方案将两种设备40 km/h 实际提速点归为一致,均为1 033 m 处。从运输效率看可行性最高,但在1 033 m 处至1 215 m 处的182 m 区段内,只有300S 型设备以30 km/h 的速度运行过,且将4184 应答器组中第3 条静态速度由30 km/h 提升为40 km/h,须与设计部门进一步论证确认该区段内的地面设备是否满足40 km/h 的走车条件。
4 结束语
结合动车组通过南宁动车所至南宁东站方向咽喉区轮对踏面诊断设备区段车尾保持场景和地面应答器设置情况,动车组运行速度没有及时提速和通过速度低(15 km/h 以下),司机操控困难、影响动车组通过咽喉区的效率等实际情况,对比300T、300S 型ATP 的车尾保持处理逻辑分析,提出改进方案。依据4184 的应答器组第4 条报文描述(745 m处可提速至40 km/h,如图1 所示)及4101 的应答器组第1 条报文描述(954 m 处可提速至40 km/h,如图2 所示),说明设计条件在745 m 处之后即允许运行40 km/h,同时通过对现场设备进行调研,1 033 m 处至1 215 m 处182 m 区段内的地面设备满足40 km/h 的走车条件。与设计部门进一步论证确认实施后,可缓解南宁动车所至南宁东站方向咽喉区动车组通过效率,提高运输效益。
猜你喜欢
汽车观察(2021年4期)2021-05-10 04:06:54
铁道通信信号(2020年9期)2020-02-06 09:15:22
小哥白尼·军事科学画报(2019年12期)2019-03-02 07:42:09
测控技术(2018年10期)2018-11-25 09:35:32
铁道通信信号(2016年4期)2016-06-01 12:10:19
城市轨道交通研究(2015年11期)2015-02-27 11:02:50
城市轨道交通研究(2015年3期)2015-02-27 11:01:30
铁路通信信号工程技术(2014年5期)2014-02-28 16:57:20
铁道运输与经济(2011年10期)2011-07-13 03:04:16
金山(2010年9期)2010-09-26 07:02:04