
一种可变形机翼的变形策略及其协同控制
2023-09-26 10:18邓孝伟李晓磊向治桦张贤相孙光辉
哈尔滨工程大学学报 2023年9期
邓孝伟, 李晓磊, 向治桦, 张贤相, 孙光辉
(哈尔滨工业大学 航天学院,黑龙江 哈尔滨 150001)
变形翼的总体思想是使其气动外形适应各种飞行条件,以获得更好的飞行性能[1]。可变形机翼主要由结构骨架、蒙皮、执行系统、传感系统和控制系统组成[2]。可变形机翼不仅要实现机翼变形,而且还必须能够承受外部和内部载荷。这就要求可变形机翼既具有柔性,同时还具有足够的强度[3]。随着材料技术[4-7]、传感技术[8]的发展,变形翼的研究也越来越受到关注。
变形翼根据改变的机翼几何参数的不同,可分为平面形状变形、平面外变形,以及翼型变形,其中平面形状变形包括变翼展、变后掠、变弦长,平面外变形包括扭转、Z形翼、变翼展方向的弯度,变翼型包括变弯度和变厚度[9]。变形翼飞行器的控制包括,对机翼变形的控制和对飞行器整体的控制[10]。
由于对气动效率、机动性、负载控制和减轻、高升力产生等方面的巨大潜力,学者们在变形翼的相关课题开展了大量研究[3]。Kim等[11]采用积分强化学习和基于确定性策略的梯度学习方法对参数化控制输入进行训练,以处理变后掠无人机的动力学控制的非线性和非仿射特性。由于训练数据有限,强化学习方法难以应对复杂的环境不确定性。Kim[12]、陆宇平[13]、江未来[14]、闫彬彬[15]均通过计算流体力学仿真分析了机翼变形对飞行器气动参数的影响,并建立了变形翼飞行器的纵向动力学模型。文献[12]建立了变后掠无人机的纵向动力学模型,设计了一种滑模控制律对无人机的飞行速度、姿态等进行控制。文献[13]建立了伸缩变翼展飞行器的纵向动力学模型,并提出了一种非奇异终端滑模控制律实现了飞行器的速度和姿态控制。文献[14]分析构建了变后掠飞行器的切换线性变参数模型,设计了一种平滑切换鲁棒控制律以抑制系统状态在切换中的抖振,实现在匀速平飞时进行机翼变形的姿态控制。但文献[12-15]都未考虑变形的同步控制问题。吴俊[16]对电动舵机驱动的变翼型机翼构造了一种二次型局部代价函数,通过设计一种最优控制器,实现了翼型变形的分布式同步控制,还分析了信息交换拓扑、信息交换时延对变形控制系统稳定性的影响。但并没有考虑变形过程中气动负载、变形负载对变形的影响。
针对翼型变形,本文提出了一种变形策略,能保证在变形过程中翼面始终光滑且便于实施变形同步控制,为减小变形不协调、不同步等问题的影响,本文提出了一种基于交叉耦合的分布式协同控制方法,通过配置系数矩阵生成交叉耦合偏差,设计分布式控制器使交叉耦合偏差收敛以实现同步控制。
1 翼型变形分析
1.1 变形策略简介
可变形机翼飞行器的控制包括机翼变形控制和飞行器整体的飞行控制,两者相互耦合,如图1所示。本文主要侧重机翼变形的变形同步控制,提出了一种可保证变形翼面光滑且便于实施同步控制的变形策略。针对该变形策略利用CFD仿真分析了变形对变形负载和气动参数的影响。
考虑机翼变形的翼面光滑性要求,同时便于进行变形同步控制,本文针对翼型变形设计了一种变形策略。引入变形比函数,即变形后翼型参数与参考翼型参数的比值函数,为保证变形后的翼型光滑,该变形比函数在翼型域内光滑且在前缘点和后缘点处的变形比数值为零。
假设翼型前缘点为原点,前缘点指向后缘点方向为x轴正向,y轴正向垂直x轴指向上翼面方向,则翼型可表示为:
(1)
本文中变形比函数R(x)选取三次多项式函数,该变形比函数满足翼面光滑条件:
R(x)=ax(x-b)(x-1), 0≤x≤1
(2)

本文仅对上翼面进行变形,变形后的翼型为:
(3)
基于上述变形函数,改变不变形点和变形比的最大值可以实现翼面变形,并且可以保证在变形过程中翼面光滑。
1.2 气动特性影响分析
基于1.1节的变翼型参数定义,本文设计了一种固定不变形点,改变最大变形量的变形策略。结合式(2)和(3)可知,该变形策略在变形过程中各变形点处变形量的比值始终保持不变,这便于变形同步控制器的设计。
飞行器的升力L、阻力D与气动参数、机翼形状的关系满足:
(4)
式中:ρ为大气密度;V飞行器的速度;SW为机翼参考面积;CL、CD分别为升力系数和阻力系数。
为分析变形对气动参数的影响,利用CFD仿真计算该变形策略下机翼的气动参数(升力系数、阻力系数)。仿真试验中选取NACA2412作为参考翼型,仅对一段机翼进行仿真,该段机翼的翼根弦长为3 m,翼尖弦长为2.7 m,前缘后掠角为26.565°,后缘后掠角为11.31°,翼展为1 m。仿真中设置攻角为20°,流速为0.4Ma。
基于1.1节的定义,保持不变形点为0.75,最大变形比从-0.3~0.3均匀变化,构成一组21个翼型的仿真试验。仿真结果如图2,由图2可知变形时升力、阻力和升阻比与最大变形比均近似满足线性关系。这将大大降低飞行器整体控制器设计的难度,这也体现了该变形策略的优越性。本文将基于该变形策略给出一种通用的变形同步控制方案。

图2 翼型变形对气动参数的影响
1.3 变形方案与负载估计
为了实现机翼翼型的改变,需在机翼上布置变形装置。图3(a)展示了在翼型截面内翼型变形的基本原理[17],图3(b)展示了一段机翼上变形装置的布置,变形装置分别沿翼型横截面和沿机翼翼展方向进行阵列布置,共8个变形装置,布置成4×2的阵列。按照从翼根到翼尖,从前缘到后缘依次编号为变形装置1~8和作用点1~8。变形装置由电机、传动装置等部分组成。驱动变形装置阵列协同动作,就能够实现机翼翼型按照指定的规律变化。

图3 翼型变形原理
利用仿真可等效地近似计算出各变形装置作用点处的气动载荷(流体对翼面的压力或吸力等效到变形作用点处的推力或拉力)。进而提取出各变形装置的位移量与载荷之间的关系。采用线性拟合:
(5)



表1 变形装置等效负载力拟合结果
(6)
各变形装置的气动负载与机翼整体翼型相关,因此各变形装置的变形量和气动负载是相互耦合的,即第k个变形装置的气动负载不仅与第k个变形装置的变形量有关,还与其余的变形装置的变形量有关。在仿真中不可能考虑到所有的翼型,若翼型变形过程中的过渡翼型恰好就是仿真的插值翼型,则可近似表示第k个变形装置的气动负载力矩:
(7)
式中:xk为第k个变形装置的位置;Kft为空气负载力的等效力臂,m。
2 翼型变形控制
2.1 变形系统的数学模型
对于4×2的变形装置阵列,可建立8个相互关联的永磁同步电机的数学模型。对于变形装置k的永磁同步电机,其d-q轴数学模型为:
(8)
式中:ud、uq分别为直轴、交轴下定子线圈两端电压;id、iq为直轴、交轴下通过定子线圈的电流;R为定子电阻;Ld、Lq分别为定子的直轴、交轴电感;ωe为转子的电角速度;ψf为永磁体的磁链。
电机机械角度θm和变形装置的位移xk满足:
xk=Gθm
(9)
式中G为传动增益常数,m/rad。
其电磁转矩方程为:
(10)
式中:Te为电磁转矩;np为极对数。
其动力学方程为:
(11)
式中:Tf为摩擦转矩;TL为气动负载转矩,可通过式(7)近似算得;J为电机转子的转动惯量;ωm为电机机械角速度。
本文采用连续可微的摩擦模型[18]:
Tf(ωm)=β1[tanh(β2ωm)-tanh(β3ωm)]+
β4tanh(β5ωm)+β6ωm
(12)
式中β1~β6为正实数。等号右边第1项代表Stribeck效应,第2项代表库伦摩擦,第3项代表粘滞摩擦。
式(5)~(12)给出了翼型变形系统的控制模型,但此模型中为了得到变形负载,假设各变形负载相互解耦。为了满足负载相互解耦的条件,需要对各变形装置进行协同控制,以保证变形过程中的过渡翼型恰好就是气动负载拟合采样点处的翼型。
2.2 翼型变形协同控制
机翼变形需采用协同控制主要基于2个方面的考虑。1)各变形装置协同动作保证在变形过程中翼面平滑,保证在变形过程中机翼的气动特性不出现突变,保证翼型变形准确、可靠;2)各变形装置协同动作保证变形过程中的过渡翼型恰好是CFD仿真的“插值点”的翼型,进而使得各变形装置负载转矩的估计实现解耦。当然,对左侧机翼、右侧机翼进行变形同步控制还可以保证变形过程中左右翼始终保持对称。
交叉耦合同步的核心思想是通过构建交叉耦合偏差,使得交叉耦合偏差收敛于零时被控的各状态量实现同步。而使交叉耦合偏差收敛到零则是控制器的工作,即交叉耦合偏差生成器和控制器的设计是相对独立的。
用被控对象状态的加权平均构造交叉耦合偏差是一种常用的方法[19]。对于n个被控对象进行同步,第k个被控对象的交叉耦合偏差为:
(13)

k={xi|i=k,或对象i和对象k相互共享自己的状态信息,i,k∈{1,2,…,n}}
(14)
(15)
可证明按上述方法生成的交叉耦合偏差对于n个同步对象的初始状态和期望状态的差值相等,即:
xkd-xk0=xj d-xj 0,k,j∈{1,2,…,n}
(16)
的情形能够实现同步。为了简便,取权值为:
wk,i=1/|k|
(17)
对翼型变形同步,不满足式(16)。各变形装置的初始状态和期望状态的差值满足比例关系:
xid-xi0=kij(xjd-xj0),i,j∈{1,2,…,n}
(18)
对于此情况,本文提出一种通用的交叉耦合偏差生成方法用于多个被控对象的分布式同步控制。
对n个被控对象的状态x1,x2,…,xn进行同步,构建n个交叉耦合偏差ecc=We,其中W∈Rn×n为待设计的权重矩阵,零元素和非零元素的位置须满足通信拓扑的约束,e=x-xd,x=[x1x2…xn]T∈Rn,xd为期望状态构成的列向量,若权重矩阵W的最简行阶梯形为:
i=1,2,…,n-1,
且设计n个分布式控制器使交叉耦合偏差ecc收敛到零,则该控制器可实现被控对象状态的同步,即状态满足(x1-x1d):…:(xn-xnd)=k1:…:…:kn-1:1。
根据Q的形式可知,对于n被控对象进行同步控制,设计n个分布式同步控制器,若至多有1个控制器发生故障,仍然能够实现所有被控对象状态同步。即交叉耦合同步控制本身具有冗余特性。
权重矩阵W的配置步骤为:
1)按照初始状态和期望状态的差值相等配置权重系数矩阵,记为W0;
2)根据初始状态与期望状态的差值的比例关系(x1d-x10):…:(xnd-xn0)=k1:…:kn-1:1,构造对角矩阵V=diag(v1,v2,vn),满足vv=viki,i=1, 2, …,n-1且vi>0,i=1,2,…,n;
3)待求的权重系数矩阵为W=W0V。
按上述方法配置的权重系数矩阵W的最简行阶梯形满足要求,且矩阵W满足信息交互拓扑对应的零元、非零元约束。考虑到实际应用中矩阵W的元素位数有限,在构造过程中需要对各被控对象初始状态与期望状态的差值的比值进行截断。
针对图3中的变形装置阵列,本文采用四边形拓扑进行变形装置间的状态信息交互,对应的状态交互拓扑如图4。图4中箭头代表状态信息的流向。按上述步骤矩阵W0为:

图4 变形装置交互的拓扑
在设计同步控制器时,可采用不同的状态信息生成交叉耦合偏差,生成同步控制量也可以施加到控制环路的不同部位。对于常见的机电系统,构建交叉耦合偏差可以提取位置、速度信息,生成的同步控制量可以施加到电机控制的电流环、速度环和位置环,不同方案的实现难点和同步效果有所差异。
针对翼型变形控制模型,更关注各变形装置位置的同步,并且由于提取速度需进行微分易受噪声影响,因此选择位置状态生成交叉耦合偏差。系统的控制框图如图5所示,同步控制器采用PID控制器,综合考虑动态响应,以及抑制启动延时对同步性能的影响,将同步控制量施加到位置环,用于对指令信号进行微小修正。

图5 交叉耦合同步控制系统
3 仿真校验
3.1 仿真条件
针对4×2的变形装置阵列,考虑永磁同步电机的具有分布式的参数,即8个变形装置的电机电磁参数、转动惯量、摩擦参数等均不相同。假设上述参数在某一标称值附近符合正态分布,参数均值近似为标称值,方差为标称值的5%,标称参数见表2。
按照第1节中的翼面变形定义,结合翼型数据,可以确定8个变形装置处的位移指令。本文以1.2节的翼型1和翼型2作为2种期望的翼型,提取8个变形装置处的期望位置,结果如表3。
根据变形翼型间的位移比例关系,构造生成交叉耦合偏差的权重系数矩阵W,结果为:

8个变形装置的电流环、速度环、位置环PID控制器采用相同参数,分布式同步PID控制器采用不同参数。为了简化同步控制器的参数整定,设置变形装置8的同步控制器参数作为参照,其他同步控制器的参数与之满足比例关系k1:…:kn-1:1。控制器参数见表4。
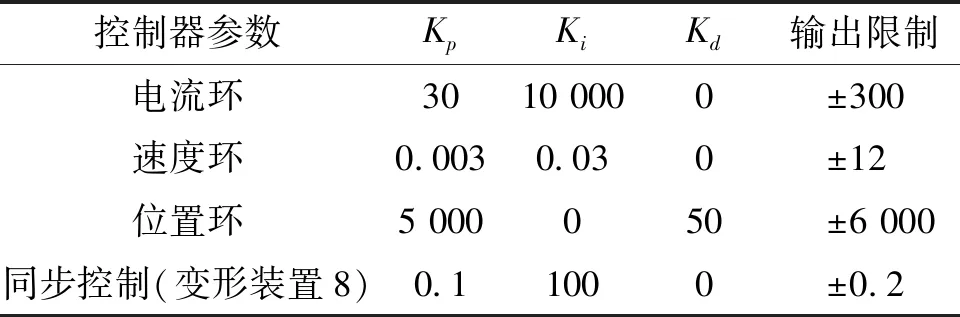
表4 控制器参数
数值仿真条件设置如下:初始翼型为参考翼型,在t=0.1 s时,开始向翼型2变形;在t=3 s时,开始由翼型2向翼型1变形;在t=7 s时,开始由翼型1向参考翼型变形。按变形装置8的电机速度1 000 r/s,其余变形装置的电机速度与之满足比例关系k1:…:kn-1:1,生成梯形位置指令。设置传动增益常数G的数值为1×10-3/π,等效力臂Kft的数值为0.001,仿真步长1×10-4s,仿真总时长10 s。
设置了2组仿真试验。仿真1:在变形装置2的电机上施加一个幅值为0.5 N·m,周期为1 s,初始相位为0的方波信号,用于模拟周期性干扰。仿真2:施加与工况1相同的外部干扰,且将变形装置1、7的电机位置输入指令信号分别滞后和超前100 ms,用于模拟电机的启动延时。
3.2 仿真结果及分析
由于变形系统由多个变形装置组成,直接给出8个变形装置的位置曲线无法直接反映性能的差异,且图线太多过于杂乱。为了解决这一问题,引入各变形装置的实时位移占期望位移的百分比的最大差值η作为同步性能的评价指标,引入各变形装置位移误差的最大值emax作为稳态性能的评价指标。η和emax分别体现了8个变形装置间同步差别最大,稳态误差最大的数值,具体定义为:
(19)
(20)
式中:k代表变形装置k,1≤k≤8且k∈N;xk为变形装置k的实时位置;xkd为变形装置k当前变形任务的期望位置;xk0为变形装置k当前变形任务的初始位置。η单位为1,emax单位为m。
针对仿真1和仿真2,分别进行了并行控制和交叉耦合同步控制,对比了2组试验下2种控制方式的稳态性能和同步性能,仿真结果如图6~7。
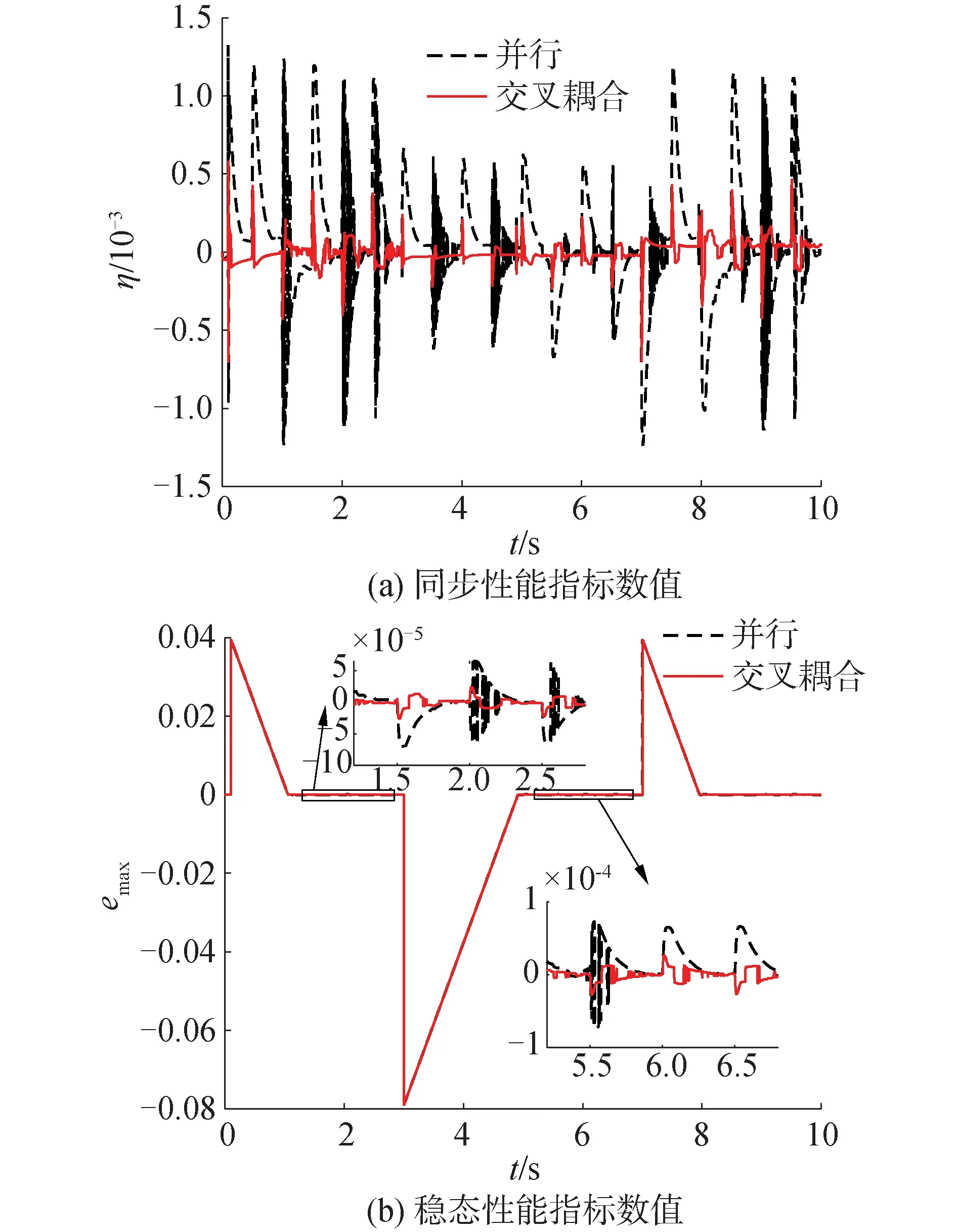
图6 仿真1性能对比
存在外部干扰、没有启动延迟时,仿真结果如图6,由图6可知,并行控制和交叉耦合分布式同步控制都能很好地抑制外部干扰,并且能够保证变形同步。但交叉耦合同步控制较并行控制,同步性能提升了56%以上,稳态性能提升了62%以上。
存在外部干扰和启动延迟时,仿真结果如图7,由图7可知,并行控制对启动延时非常敏感,同步性能很差。相比之下,交叉耦合分布式同步控制能够很好地抑制启动延时对同步性能的影响。后者的同步性能较前者提升12倍以上。两者控制器的变形量最终都能收敛到期望值,但交叉耦合同步控制的稳态性能较并行控制提升了64%以上。

图7 仿真2性能对比
仿真结果表明本文提出的交叉耦合分布式同步控制能够很好地抑制外部干扰、启动延时对同步性能、稳态性能的影响,对外部干扰、启动延时具有良好的鲁棒性,并且,同步性能和稳态性能较并行控制均有显著提升。
4 结论
1) 提出的变翼型变形策略,保证变形过程中翼面始终光滑,且各变形点的变形量比值恒定,为翼型变形同步控制器的设计提供了极大的便利。
2) 针对多个被控对象的同步控制问题,提出了一种通用的交叉耦合同步偏差生成方法,该方法将同步问题从同步控制中分离出来,使得同步控制器的设计变得简单,且便于实现分布式控制。
3) 通过2组仿真实例验证了该方法的有效性和鲁棒性,本方法相比于并行控制,同步性能和稳态性能均提升一倍以上。
猜你喜欢
兵器装备工程学报(2021年12期)2022-01-11
北京航空航天大学学报(2020年10期)2020-11-14
探测与控制学报(2018年3期)2018-07-09
纤维复合材料(2018年3期)2018-04-25
制造技术与机床(2017年2期)2017-05-04
航空学报(2015年4期)2015-05-07
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
振动、测试与诊断(2014年5期)2014-03-01
振动、测试与诊断(2014年1期)2014-03-01
