
内波环境下水下滑翔机流场与载荷特性分析
2023-09-26 10:18邹丽赵涛马鑫宇孙铁志王振
哈尔滨工程大学学报 2023年9期
邹丽, 赵涛, 马鑫宇, 孙铁志, 王振
(1.大连理工大学 船舶工程学院, 辽宁 大连 116024; 2.高技术船舶与深海开发装备协同创新中心, 上海 200240; 3.北京航空航天大学 数学学院, 北京 100083)
水下滑翔机作为一种新型海洋装备,在海洋资源探索、海洋资源开发以及海洋国防安全等方面具有广阔的应用前景[1]。内波作为一种频繁发生在海洋内部海水密度分层处的水体运动现象[2],具有波幅大[3]、能量强以及分布广[4]等特点,传播过程中会伴随强烈的剪切流场[5],从而对水下海洋结构物产生冲击载荷[6]。因此,明确内波环境下水下滑翔机的水动力载荷特性具有非常重要的工程意义。
海洋结构物在内波作用下的水动力载荷问题近年来受到学者们的广泛关注。Cheng等[7]研究了在内孤立波和表面波共同作用下以及内孤立波单独作用下深海平台系泊线失效后2种不同体条件下的差异。Huang等[8]针对内孤立波与圆柱型结构物的相互作用实验,建立了圆柱型结构物遭遇内孤立波时受到的载荷预报模型。Liu等[9]采用一种耦合模拟方法研究了内孤立波与深海立管的相互作用,结果表明,内孤立波不仅会对深海立管产生剪切载荷,而且也会使立管发生大幅度的变形。胡英杰等[3]研究了内孤立波作用立管时立管的动力响应规律,研究结果表明,随着波幅的增大,立管的位移和应力显著增大。Huang等[10]研究了水下航行器遭遇内孤立波时其周围流场的变化,在经过内孤立波时,其周围流场会发生复杂变化,导致航行器会受到突变的流体动力影响。徐明等[11]总结了竖直柱状物遭遇内孤立波时的受力特性。王旭等[12]研究了内孤立波作用下直立圆柱体的受力特性。王玲玲等[13]借助三维数值波浪水槽,采用大涡模拟技术来研究内波对不同形状柱体的载荷,得出同种波幅内波作用下方柱受到的水平作用力大于圆柱的结论。董国华等[14]研究了潜艇遭遇内孤立波时周围的流场和阻力性能。然而,研究者们关注点主要集中于圆柱、方柱、潜艇、潜水器等一些经典结构物,并未见到内波环境下水下滑翔机的流场与载荷特性分析研究。
鉴于此,本文建立了内波数值水槽。首先将数值波形与实验波形进行对比,验证此数值方法的可靠性,然后利用此数值水槽对滑翔机在不同潜深和俯仰角情况下遭遇内波的情况进行了模拟,最后总结了滑翔机在遭遇内孤立波时的流场演化特性以及受到的阻力、升力和俯仰力矩的演化规律,对经典式水下滑翔机的设计以及作业时遭遇内孤立波的受力预测具有重要的理论和工程意义。
1 数值设置
本文利用CFD软件STARCCM+对水下滑翔机在不同状态下遭遇内波的情况进行了数值模拟。在多相条件下,依托隐式非定常的时间条件,运用VOF(流体域体积)法捕捉内孤立波波面,在k-Epsilon湍流模式下运用重力塌陷法进行数值造波。
1.1 控制方程
流体的连续性方程为:

(1)
动量方程为:
(2)

湍流模型选为k-Epsilon模型,其主要在方程中引入了湍动能k和湍动耗散ε方程。
湍动能k方程:
(3)
湍动耗散率ε方程:
(4)
湍动粘度方程:
(5)
式中:μ为动力粘性系数;经验常数C1ε一般取1.44;C2ε一般取1.92。
1.2 计算模型及验证
本文数值水槽按照大连理工大学内波实验水槽[15]搭建,尺寸为5 m×0.43 m×0.55 m,如图1为数值水槽的二维正视图。选用水、二甲基硅油和空气三相,其中水的密度为1 003±1 kg/m3,二甲基硅油的密度为941±1 kg/m3,空气的密度为1.184 15 kg/m3,水的动力粘度为0.001 Pa·s,二甲基硅油的动力学粘度为0.01 Pa·s。水槽划分为塌陷造波区、内孤立波传播区以及消波区。图1中,xl是塌陷区域宽度,di是塌陷高度,h1是二甲基硅油的深度,h2是水的深度,最上层为空气,采用重力塌陷法生成内孤立波,尾部消波以减小反射波的影响。整个计算域采用切割体网格划分法,为了使计算结果更加精准,对水油交界面以及空气油交界面之间的区域以及滑翔机进行网格加密,计算域网格划分如图2所示,图2中坐标原点取为X、Y、Z三轴的交界处。采用工况xl=35 cm、di=10 cm、h1=5 cm、h2=30 cm进行模拟。进行模拟。

图1 数值水槽二维示意

图2 计算域网格划分
1.2.1 网格和时间步验证


图3 中密度网格示意

图4 3种密度网格划分下波形对比
验证网格的收敛性后,选择中密度网格划分方法,在Courant小于1的情况下分别取3种不同的时间步进行求解,时间步分别取0.005、0.01、0.02 s。将内孤立波传播稳定后的波形进行对比,如图5所示,时间步0.005 s和时间步0.02 s的波形收敛于时间步0.01 s的波形,使用0.01 s的时间步进行数值模拟是可行的。
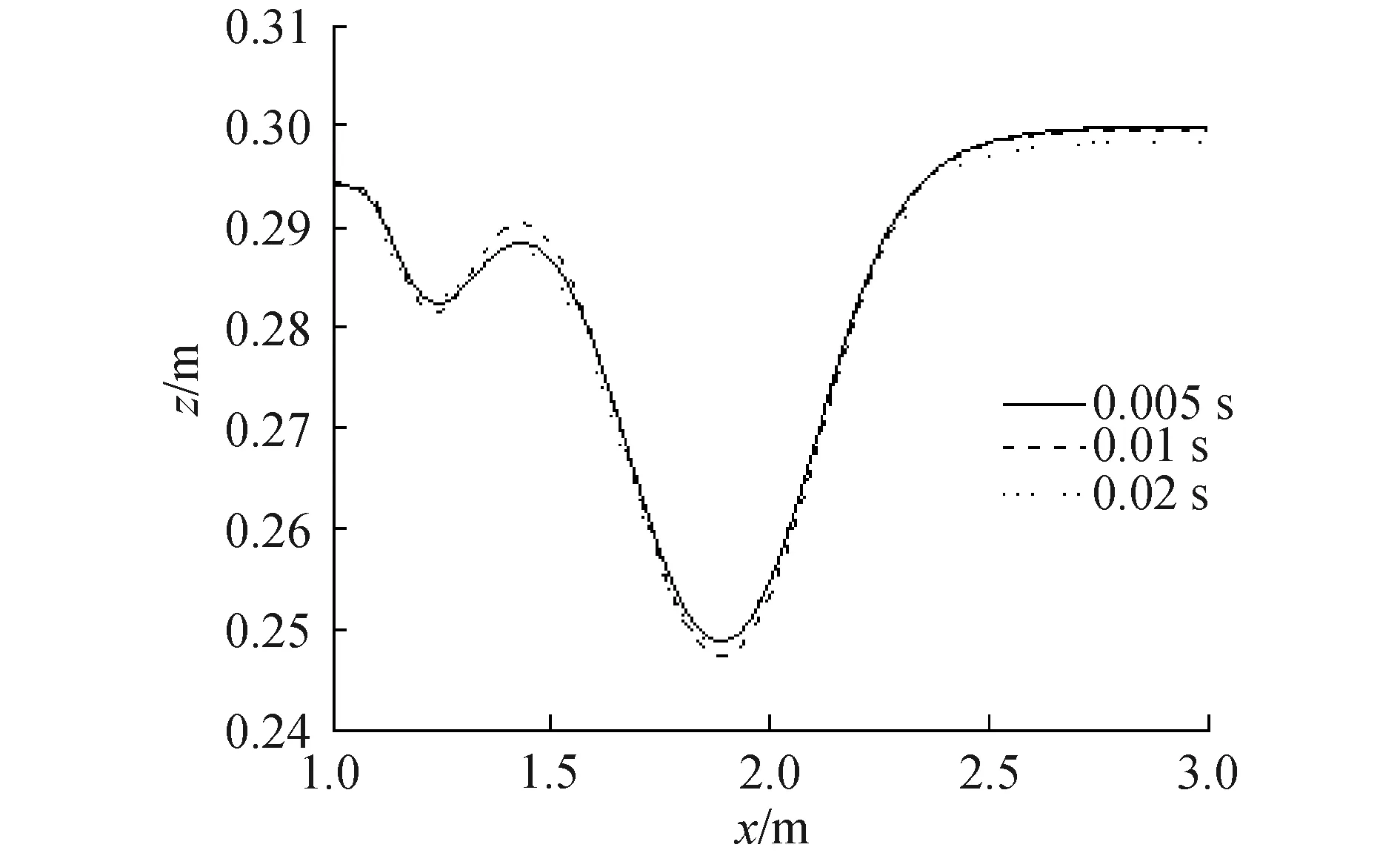
图5 3种计算时间步波形对比
1.2.2 数值波形验证
选取内孤立波传播稳定后t=8 s时刻的数值计算结果和实验波形进行对比。实验在大连理工大学船舶工程学院内波实验水槽中完成,水槽的基本情况如小节1.2中的内波数值水槽,同样采用重力塌陷法造波[5],并且对造波工况进行多次实验减小误差,在实验过程中,下层流体用蓝色染色剂染色,如图6(a)所示。对得到的图片灰度化处理,如图6(b)所示,通过其灰度直方图呈现的双峰值特征,加上2个峰值覆盖的边界范围,这样就可以区别出原图片中的上下层流体的对应区域,最后可以获得内孤立波的波形和位置,得到如图6(c)的实验波形[16]。图6(c)中x轴的原点取t=8 s时波谷处的位置坐标,z轴的原点位置为初始时刻水和硅油的液面交界处。
结果表明,在相同的内孤立波生成时间处,虽然数值波形相较于实验波形,波长较大,但是从整体波形和波幅上可以看出数值造波和实验造波的波形吻合得很好,因此可以采用该数值水槽分析内波环境下水下滑翔机的流场与载荷特性。
1.2.3 计算模型及工况选择
计算模型采用文献[17]简化的水下滑翔机模型,水下滑翔机的中体部分采用了Solcum的圆柱体形状,滑翔机的头部和尾部采用不同尺寸的半椭球体,翼型选择了NACA0015型翼型,机翼的位置距离头部0.6 m,尾掠角为45°,其尺寸如图7所示,本文采用缩尺比0.2进行数值计算。基于上述搭建的数值水槽,分析内孤立波环境下水下滑翔机的流场演化特性以及不同深度和俯仰角水下滑翔机的载荷特性。

图7 水下滑翔机模型
基于胡英杰等[3]研究者的研究,内孤立波波面上方流体速度明显大于波面下方,当远离波面时,流体的速度减小,水下滑翔机在不同水深处受到的内孤立波的作用力会有显著差异,同时水下滑翔机在水下作业时的运动方式主要是滑翔,因此,不同姿态的滑翔机在内孤立波作用下也会表现出不同的载荷特征。鉴于此,本文分析了内波环境下水下滑翔机的流场演化特性,以及在边界条件、网格划分、计算时间步相同的条件下通过改变水下滑翔机的不同深度和俯仰角来研究内孤立波环境下水下滑翔机的载荷特性。具体工况如表1。
2 结果分析
本节主要通过对内孤立波与无移速水下滑翔机的相互作用系统的数值计算得到的结果进行分析,研究了内孤立波环境下水下滑翔机的流场演化特性,以及在边界条件、网格划分、计算时间步相同的条件下通过改变水下滑翔机的潜深和俯仰角分析内孤立波环境下水下滑翔机的载荷响应规律。
2.1 内波环境下水下滑翔机流场演化分析
本节以工况3为例,图8和图9分别展示了t=10、11、12、13、14 s下的水平截面z=0.28 m和中纵剖面y=0.215 m处的涡量场和速度场,通过这2个截面讨论了内波环境下水下滑翔机的流场演化特性。

图8 截面z=0.28 m处的涡量场和速度场

图9 截面y=0.215 m处的涡量场和速度场
从图8和图9的涡量场中可以看出,随着内孤立波的传播,水下滑翔机所处流场的涡量先增大在减小,且滑翔机上下部分的涡量随着时间的变化,先是上面区域的涡量较大,在t=12 s,下面区域的涡量较大。t=10 s,内孤立波开始接触水下滑翔机,此时滑翔机所处流场涡量明显增大。滑翔机前部包括机翼区域的涡量明显增大,在首部中间和上面区域的涡量要明显大于下面区域的涡量。t=11 s,滑翔机涡量继续增大。滑翔机首部包括机翼区域的涡量继续增大,机翼尾端的涡量有所减小,同时滑翔机下面区域涡量增大,且下面涡量小于上面区域涡量。t=12 s,滑翔机涡量开始减小,滑翔机前端以及机翼前端区域涡量略有减小,机翼尾端涡量增大,滑翔机前端上部分涡量仍大于下部分,但是整体来看,滑翔机下半部分涡量大于上半部分。t=13 s,滑翔机所处流场的涡量减小,且机翼尾端涡量减小明显,滑翔机下半部分涡量幅值大于上半部分。t=14 s,滑翔机涡量继续减小,前部区域涡量减小明显,但是机翼后部涡量略有增加,滑翔机后部区域下半部分涡量大于上半部分。随着内孤立波的传播,水下滑翔机的涡量会先增大在减小,在传播过程中滑翔机机翼尾部的涡量会发生先增大在减小的2次变化,同时滑翔机上部区域涡量在内孤立波传播过程中先大于下部区域,后小于下部区域。
从图8和图9的速度场中可以看出,随着内孤立波的传播,水下滑翔机所处流场的速度先增大在减小,上层流体速度显著大于下层流体速度,相同流体随着流体远离内孤立波波面,速度也会逐渐减小。t=10 s,内孤立波开始接触水下滑翔机,滑翔机前部区域速度明显增大,且滑翔机上半部分区域速度大于下半部分区域。t=11 s,滑翔机所处流场速度继续增大,出现头部区域速度小于两侧速度的现象,滑翔机上半部分区域速度大于下半部分。t=12 s,滑翔机所处流场速度达到最大,靠近滑翔机机翼位置处速度较大,滑翔机前部和后部速度较小,且滑翔机上层流体速度大于下层流体速度。t=13 s,滑翔机周围流场速度明显减小,流场速度在滑翔机两侧较大,且上半区域速度仍大于下半区域。t=14 s,内孤立波离开水下滑翔机,滑翔机所处流场速度继续减小,周围流场速度分布变得均匀。在内孤立波传播过程中,水下滑翔机所处流场的速度先增大再减小,在滑翔机穿越内孤立波过程中,滑翔机侧面两端区域流场速度大于前后两端区域,当内孤立波离开水下滑翔机后,滑翔机所处流场速度变得均匀,且上层区域速度大于下层区域速度,当远离波面时,流体的速度也会减小。
2.2 不同潜深水下滑翔机的载荷特性
水下滑翔机运行时,作业水深会不断变化,因此就存在着在不同潜深遭遇内孤立波的状况,因此明晰在不同深度水下滑翔机遭遇内孤立波时的受力特性,对水下滑翔机作业时遭遇内孤立波的水动力响应预测具有重要的意义。
图10给出了不同潜深下水下滑翔机受到的阻力的变化曲线图,可以看出5种工况下滑翔机受到的阻力的变化趋势是相同的,在内孤立波传播过程中先逐渐增大再逐渐减小到0,然后再反向增加到新的幅值,最后再减小的过程。虽然受力的趋势相同,但是不同深度受力的幅值和位置不相同。从5种工况阻力曲线中可以看出,滑翔机受到的阻力的方向与所处的流场流速方向有关,当滑翔机所处流场的主体发生改变时,滑翔机受到的阻力的方向也会改变。从总体趋势中可以看出,当滑翔机的位置远离初始状态两层液体交界面时,受到的阻力的幅值是增大的。

图10 阻力变化
图11给出了不同潜深下水下滑翔机受到的升力的变化曲线。可以看出5种工况的总体变化趋势基本相同,但升力减小的幅值出现的位置有所差异。当滑翔机处于两相交界面时,内孤立波传播过后都会有一定的升力衰减。但是可以看出,滑翔机受到的升力与其所处的流场环境有关而与其深度无关。5种工况中,当滑翔机处于内孤立波波面上方时,内孤立波的传播对滑翔机升力的影响很小,当滑翔机穿越内孤立波时,会对滑翔机的升力产生较大的影响。当滑翔机的深度不断增加,内孤立波波面和滑翔机的相对位置越来越远,滑翔机受到的升力变化也在逐渐减小。
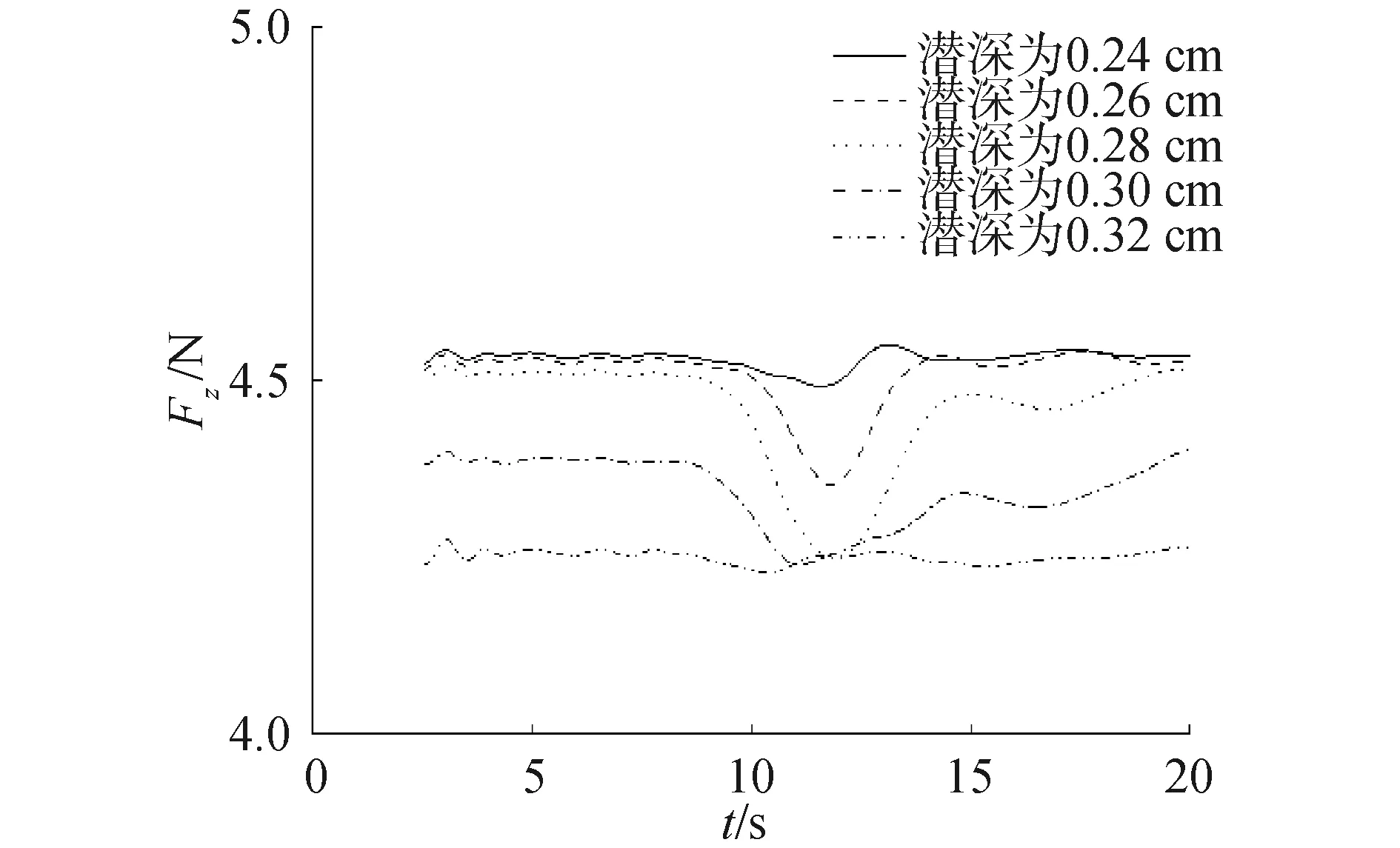
图11 升力变化
图12给出了不同潜深下水下滑翔机受到的俯仰力矩变化曲线,可以看出5种工况下水下滑翔机受到的俯仰力矩的变化趋势相同,先反向增加到幅值,然后减小到0,接着正向增加到新的幅值,最后减小到0的过程。当水下滑翔机接近两相流体交界面时,滑翔机受到的俯仰力矩的幅值会逐渐增大,从图12中可以看到,当滑翔机位于工况3时,即位于两相交界面中央时,受到的俯仰力矩幅值最大;滑翔机位于工况1和工况5时,即滑翔机远离两相交界面时受到的俯仰力矩变化很小,可以忽略。
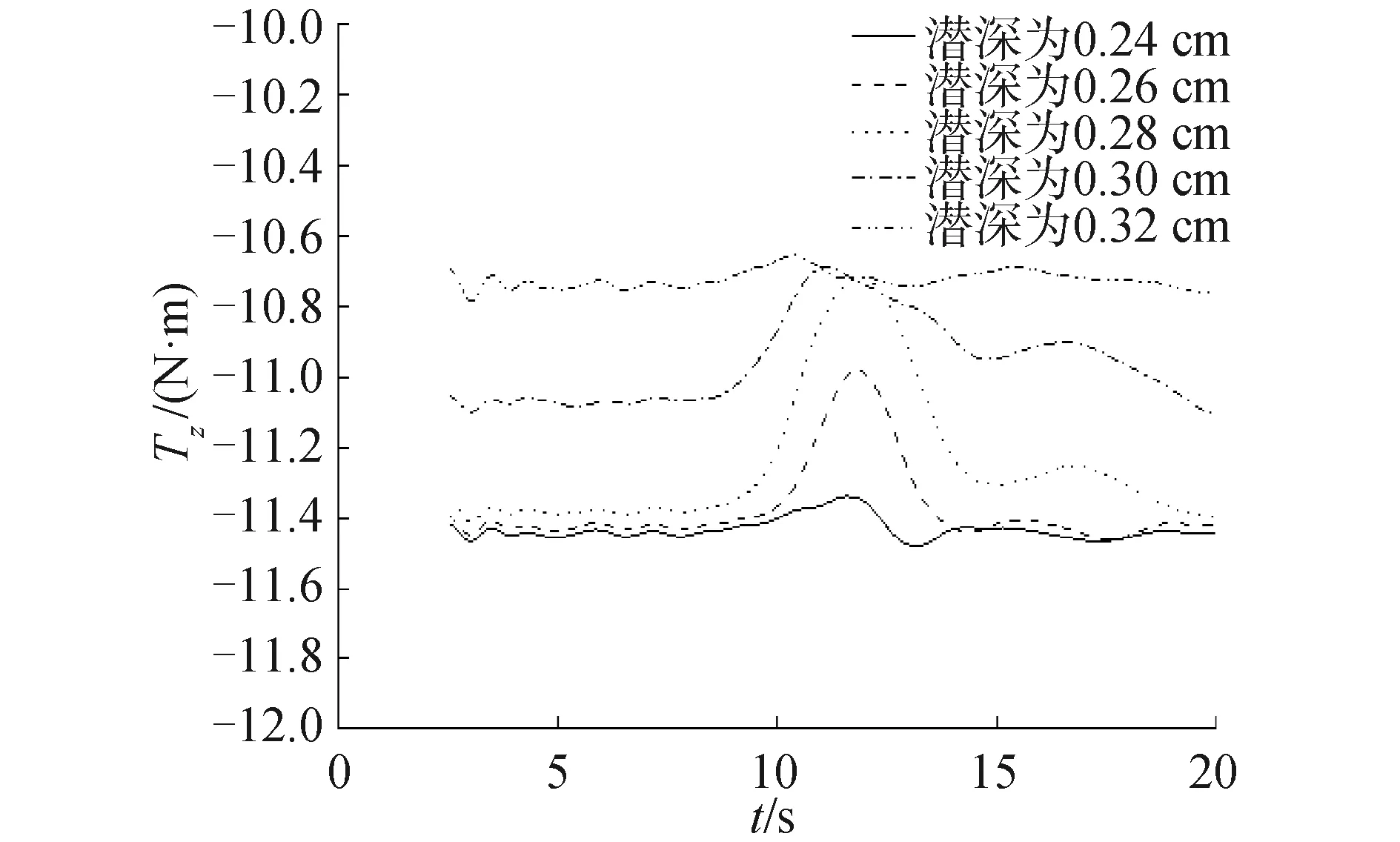
图12 俯仰力矩变化
当水下滑翔机的潜深不断增大时,随着滑翔机远离两相流体交界面,滑翔机受到的阻力幅值会增大,而且受到的阻力方向与所处流场的速度方向有关;滑翔机受到的升力衰减的幅值逐渐减小,其受到的升力主要与所处的流场流体有关;随着滑翔机远离两相流体交界面,滑翔机受到的俯仰力矩变化很小。
2.3 不同俯仰角水下滑翔机的载荷特性
水下滑翔机在运行中由于其独特的运动方式——滑翔,使得其在实际作业时可能会以不同的俯仰角和内孤立波相互作用,因此本节开展了不同俯仰角水下滑翔机的载荷特性分析。
图13给出了不同俯仰角状态下水下滑翔机受到的阻力变化曲线,可以看出阻力总体变化趋势先增加再减小到0,然后反向增加,最后回归初始状态的过程。随着俯仰角的增加,水下滑翔机受到的阻力幅值逐渐减小,同时从图13中可以看出,随着内孤立波的传播,水下滑翔机所处的流场主体发生变化时,滑翔机受到的阻力会有方向的变化。
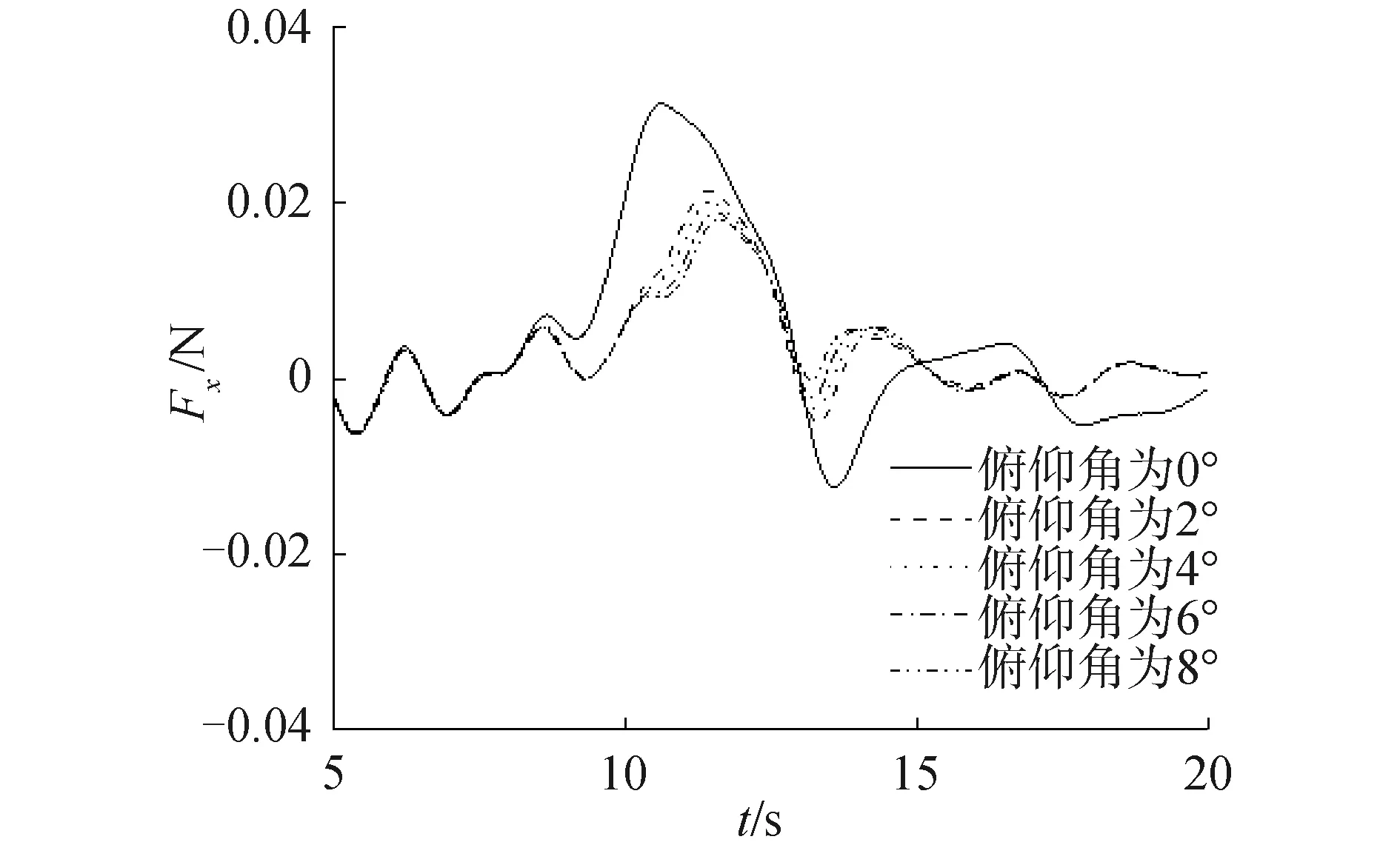
图13 阻力变化
图14给出了不同俯仰角状态下水下滑翔机受到的升力变化曲线。可以看出总的变化趋势为在穿越内孤立波过程中受到的升力先减小再恢复到初始状态,随着俯仰角的增加,滑翔机升力的幅值逐渐减小。而且从图14中可以看出,当滑翔机穿越内孤立波时,滑翔机的升力会有较大的衰减,因此要考虑滑翔机航行时升力突然减小可能带来的影响,保证滑翔机安全稳定的运行。
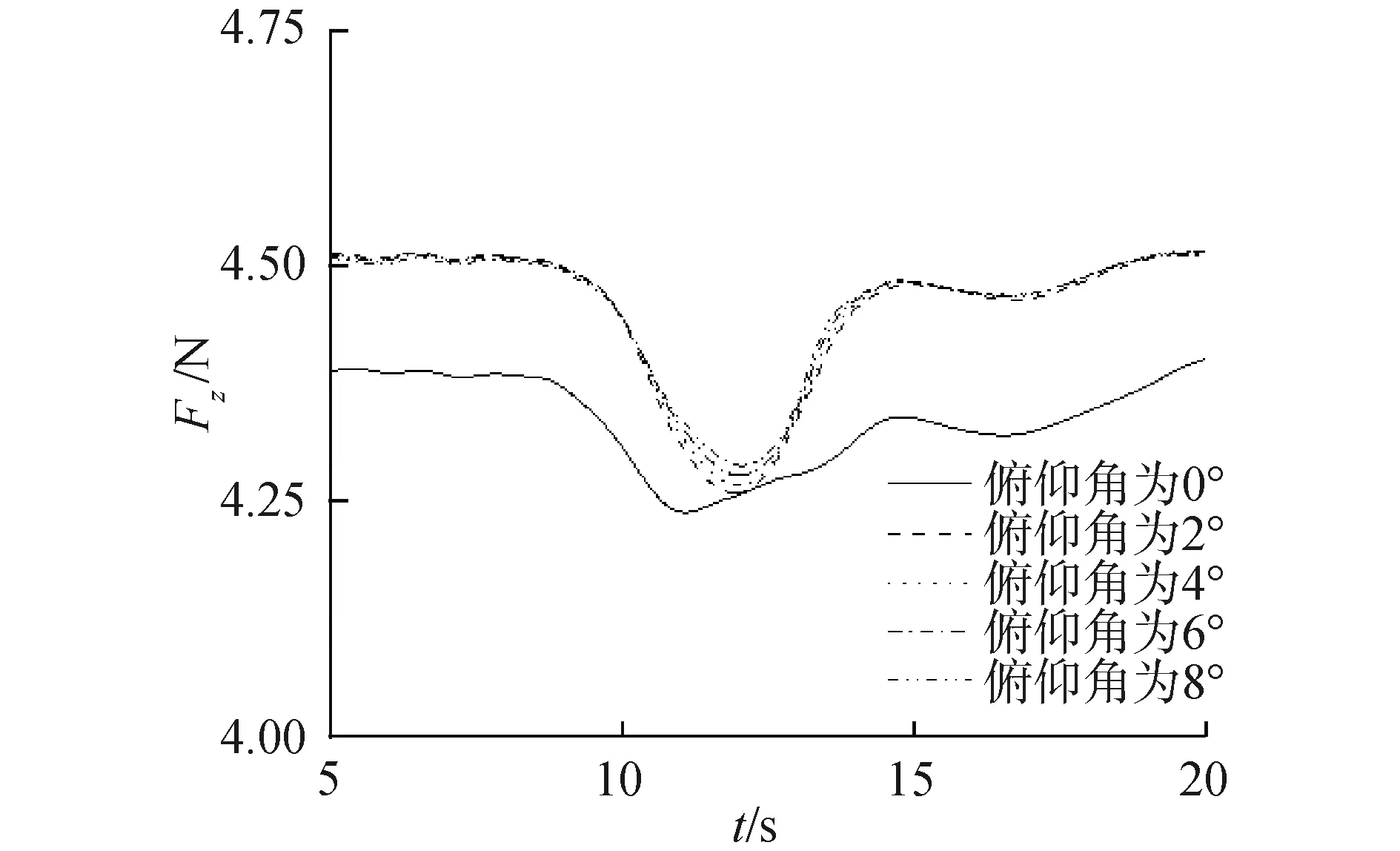
图14 升力变化
图15给出了不同俯仰角状态下水下滑翔机受到的俯仰力矩变化曲线。在滑翔机经过内孤立波过程中,可以看出,滑翔机受到的俯仰力矩会出现2个方向的幅值。随着俯仰角的增加,滑翔机受到的俯仰力矩的幅值也在逐渐增大,且滑翔机受到的俯仰力矩的幅值点也在后移。

图15 俯仰力矩变化
随着水下滑翔机的俯仰角不断增大,水下滑翔机受到的阻力幅值逐渐减小,阻力幅值点不断后移;受到的升力会骤减,升力衰减的幅值逐渐减小;受到的俯仰力矩幅值也会逐渐增大,而且俯仰力矩的幅值点也在不断后移。
3 结论
1)当水下滑翔机经过内孤立波时,滑翔机所处的速度场会先增大再减小,同时可以明显地看出上层流体的流速大于下层流体的流速;受到的涡量也是先增大再减小,同时随着内孤立波的传播,涡量的极值点会不断的后移,且滑翔机上半区域涡量先大于下半区域,后小于下半区域。
2)当水下滑翔机的位置远离内孤立波波面时,其受到的阻力逐渐增大、受到的升力变化幅值逐渐增加、受到的升力变化幅值逐渐增加。滑翔机主要位于上层流体和主要位于下层流体时受到的阻力方向相反。当滑翔机远离波面时其受到的俯仰力矩变化可以忽略。
3)当水下滑翔机的俯仰角逐渐增大时,滑翔机受到的阻力的幅值逐渐减小,当俯仰角为8°时,所受阻力最小,滑翔机最为安全。随着俯仰角的增加,滑翔机受到的升力幅值变化很小,但是滑翔机的升力会有一个骤减的现象。随着俯仰角的增加,受到的俯仰力矩幅值逐渐增大。
猜你喜欢
海洋通报(2022年6期)2023-01-07
电脑报(2021年20期)2021-08-10
中国农村水利水电(2021年2期)2021-03-05
海洋学报(2020年9期)2020-10-09
知识就是力量(2019年7期)2019-07-01
军事文摘(2018年24期)2018-12-26
小学科学(学生版)(2018年12期)2018-12-19
能源研究与信息(2018年1期)2018-05-08
中国舰船研究(2015年3期)2015-02-07
中国舰船研究(2014年6期)2014-05-14
