基于视觉振动放大技术的风电机组塔架固有频率测量
2023-09-26 01:13范海涛贺瑞敏董云鹤
内蒙古电力技术 2023年4期
刘 飞,范海涛,贺瑞敏,程 文,董云鹤
(内蒙古电力(集团)有限责任公司,呼和浩特 010010)
0 引言
风电机组是一种利用风能转化为电能的装置,由风轮、塔架、发电机等部件组成。风电机组的运行效率和安全性受多种因素的影响,其中之一就是塔架的振动特性。风电机组在运行过程中,塔架受风轮转动影响产生振动,当风轮旋转频率与机组整体结构的固有频率接近时,会产生共振,从而影响风电机组的性能及安全[1]。尤其是超高柔性塔架,塔架固有频率与风轮转速的1 倍频存在交点,可能导致共振效应的增强,进而引起塔架受迫振动的增加。为了避免对风电机组的性能和安全造成负面影响,需要采用更精准的控制算法与策略,因此准确测量风电机组塔架固有频率尤为重要。
传统测量振动的方法是采用振动传感器。然而振动传感器在超低频绝对振动测量方面存在固有缺陷,受其自身质量和体积的限制,当检测超低频(1 Hz以下)绝对振动时,振动传感器的输出信号几乎被噪声淹没,难以准确测量出振动频率[2-3]。
近年来,国内外应用视觉振动放大技术在通信塔、桥梁[4]、动设备频率测量方面取得了较好的研究成果,但该技术在风机固有频率测量方面还未开展相关试验和研究。本文首次将视觉振动分析技术应用于风电机组塔架的固有频率测量领域,并对测量的主要影响因素、精度、工程适用性进行分析和评估。
1 视觉振动放大技术介绍
1.1 技术原理
风载荷会使处于静止或工作条件下的风机在其固有频率处产生振动,但相比于风机的物理尺寸,其振动幅值非常微小。对于远距离采集的视频,这种微小振动的幅值往往处于亚像素级。视觉振动放大技术本质上是对视频每一帧中被测物的二维影像,通过图像比对、位移放大、视频重构进而做时域、频域分析的技术。该技术可将视频中被测物影像极其微小位移(亚像素级)放大至像素级,使得被测物在放大后的视频中进行高质量时域、频域分析成为可能。
视觉振动分析技术采用非接触的视觉测量方式,对超低频振动信号无测量机理上的限制,且无需在被测物上粘贴靶标,直接利用被测物的图像纹理,使用固定摄像头或手机在合适的距离对风电机组进行拍摄即可,具有操作简单、高效、低成本等优势。该技术首先进行微小运动放大,然后在运动放大后的视频中对感兴趣的区域(Region of Interest,ROI)进行振动幅值、频率和相位的测量,如图1 所示。
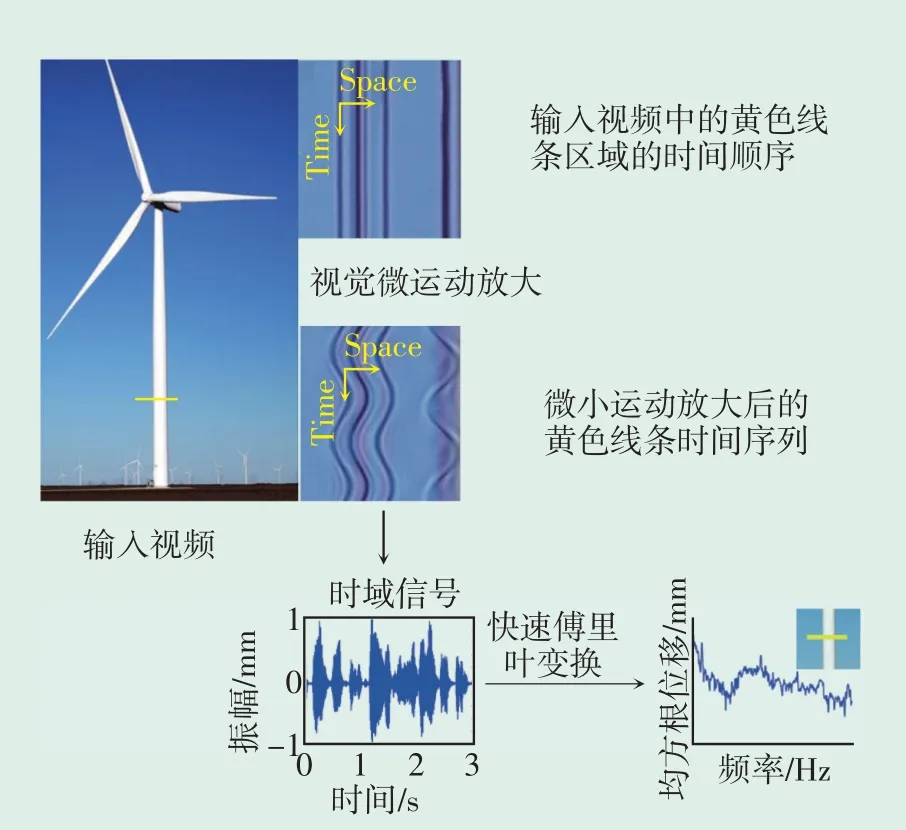
图1 基于风机固有频率进行视觉振动分析的原理Fig.1 Principle of visual vibration analysis based on the natural frequency of wind turbine
1.2 放大算法
视觉振动分析技术中的微运动放大部分是一种线性的基于欧拉微小运动放大方法(Eulerian Video Magnification,EVM)[5],EVM 是一种视频信号处理技术,旨在放大微小的视觉细节和隐含的动态变化。通过对视频序列中的每一帧进行空间域和时间域分析,EVM能够突出显示人眼难以察觉的细微运动和颜色变化。该技术基于空间域金字塔和时间域滤波器,可以扩大视觉信号中的低频和高频分量,从而提供对细微变化的放大效果,算法框架如图2所示,其中αn表示放大比例。
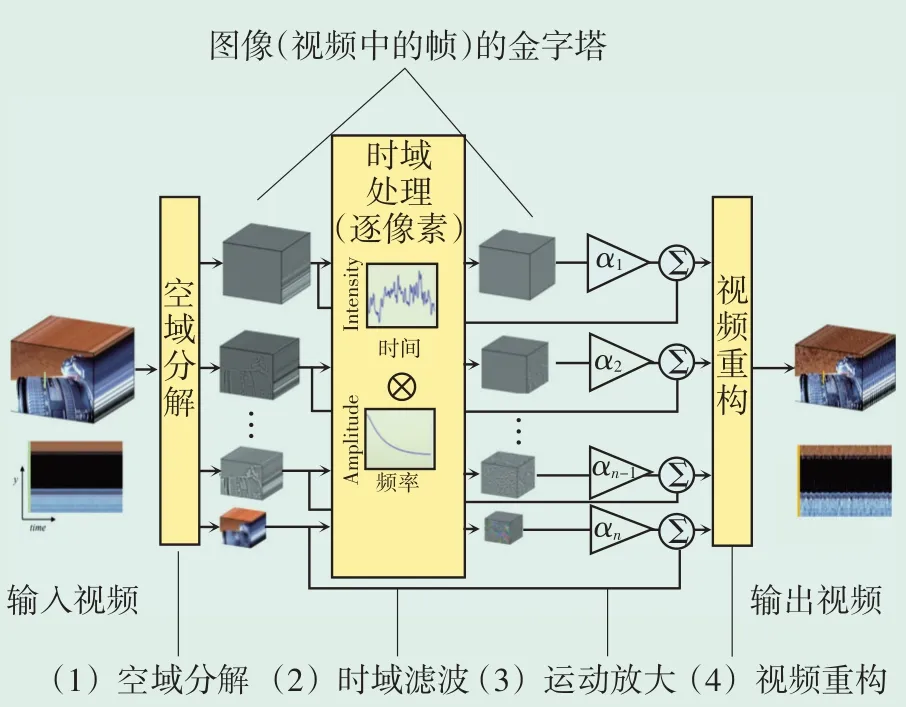
图2 基于EVM的微运动放大算法的构架Fig.2 Framework of micro-motion amplification algorithm based on EVM
1.3 处理步骤
视觉振动分析算法对视频进行运动放大技术处理主要步骤如下。
(1)空域分解:将视频中的每一帧进行二维图像金字塔分解,得到不同空域分辨率的视频。
(2)时域滤波:依据被测物振动的大体频带,对金字塔上不同尺度的图像进行频域带通滤波处理,以提高信噪比。
(3)运动放大:对带通滤波后的图像信号进行线性放大,并加到原图像信息中。
(4)视频重构:将不同频带的图像进行金字塔重建,最后合成经过放大后的图像。
在运动放大后的视频中,对视频每一帧的ROI进行图像互相关计算,获取其沿画幅(帧)x 轴、y 轴的像素位移时序,对该位移时序进行快速傅里叶变换,在采样定理决定的频域范围内,0 Hz 至视频采样频率(帧率)的一半之间,对风机固有频率进行辨识和测量。
2 风电机组固有频率测量准确性分析
2.1 主要影响因素
对振动频率的测量,视觉振动分析系统的测量误差源主要包括视频采集设备的帧率误差、算法误差等,这些误差源一般都远低于工程应用的误差范围,且可以通过拍摄电磁振动台在某个频点振动的方式进行标定,进而对频率测量值修正,因此上述误差不是风机固有频率测量的主要影响因素。
风机处于风载荷较大的野外环境,风载荷既会导致风机振动,是振动信号的产生者,也会对视频采集设备(如手机+三脚架)产生风扰动,是噪声的制造者。当信噪比在风机固有频率所在的频带范围内下降时,在频域分析中将越来越难于分辨信号(被测物体自身的振动)和噪声(视频采集设备受到风扰动带来的振动),导致测量精度的下降,甚至失败。这种信号与噪声同源的外部影响因素对风机固有频率测量影响最大。
2.2 评估方法
为了评估各种影响因素对频率测量准确性的影响,常用的评估方法有以下两种。
2.2.1 参照物法
如果在视频中存在相对静止物,如大地、远山等,将其选择为参考区,在频域分析中将参考区的频谱作为噪声基准,以验证测量区的振动频谱,被测物体自身振动信号应明显高于参考区噪声基准。
2.2.2 设计固有频率法
风机固有频率是风机设计的重要参数,一般而言,在役风机的实际固有频率不会严重偏离其设计固有频率。在频域分析中,距离风机设计固有频率较近且幅值明显高于其他频段的测量频峰,具有较高的测量可信度。
2.3 改善措施
为了降低风扰动对风机拍摄的影响,可以选择风扰动较小的拍摄位置,或使用具有高透光率外壳的防风罩,如有机玻璃盒,将视频拍摄设备放置其中,在阻隔外部风扰动的条件下进行视频拍摄,如图3所示。

图3 阻隔风扰动的视频采集设备Fig.3 Video acquisition equipment forblocking wind disturbance
3 风电机组固有频率测量的精度验证
为了进一步验证视觉振动分析技术测量频率的精度,在航天标准化研究院紧固件中心力学实验室利用电磁振动台进行试验验证。电磁振动台以1 mm 振幅做垂直方向振动,使用手机+三脚架的方式在距离电磁振动台1.5 m处以30视频采样帧率进行视频采集,然后在视觉振动分析软件中选择振动台台面作为测量区、建筑墙壁作为参考区,以25%的放大比例和0~10 Hz 的时域带通对其进行视觉放大,并对测量区和参考区在垂直方向上的像素位移信号进行时域、频域分析,如图4所示。

图4 电磁振动台的频率测量精度验证试验Fig.4 Frequency measurement accuracy verification test of electromagnetic vibration table
试验数据表明,测量区(电磁振动台台面)有明显的时域周期信号,信号幅值较大;参考区(建筑物墙壁)没有明显时域周期运动信号,信号幅值小。对时域信号进行快速傅里叶变换后,在频域4.98 Hz处,测量区有明显的峰值,参考区无明显峰值,如图4(b)所示。视觉振动分析系统所测量的4.98 Hz 与电磁振动台5 Hz的设定振动频率相吻合,0.02 Hz的误差可能为拍摄手机的帧率误差导致,也可能是电磁振动台控制振动频率的误差导致。视觉振动分析系统频率测量误差小于1%,满足绝大多数风电机组固有频率测量的精度要求。
4 现场试验分析
4.1 风机塔架固有频率测量
风机整体结构在风载荷与旋转动载荷的共同作用下会产生较大的振动,其中风载荷90%的能量存在于0~1 Hz 频率内[6],与风机一阶甚至更高阶的固有频率处于相同频率范围,所以在风载荷的作用下,无论风机处于停机或工作状态,在其固有频率上均会产生振动。
为了覆盖目前服役的风机型号,选择某风电主机生产厂商有代表性的750 kW(小型)、2 MW(中型)、6 MW(大型)三种型号风机进行试验,试验采用三脚架+手机进行视频采集。由于风机一阶至五阶固有频率一般小于10 Hz,根据采样定理,利用手机以30帧率或60帧率进行拍摄可以满足风机固有频率测量的要求。
4.1.1 750 kW风机
已知待测750 kW 风机设计一阶固有频率为0.40 Hz,使用手机+三脚架+防风罩在距风机30 m处以60 帧率进行拍摄,拍摄时风机为停机状态,风速为5~6 m/s。
在视觉振动分析系统中,由于风机顶部的机舱振幅最大,且图像纹理丰富,故选择机舱为测量区,并以风机振动幅值最大的方向(x轴方向)为测量方向,如图5所示。由于距离较远,将振动放大比例调节至60%,时域带通为0~5 Hz,对测量区进行处理分析。

图5 750 kW风机选取的测量区域Fig.5 Measurement area selected for the 750 kW wind turbine
经视觉振动分析软件计算,在时域信号中,有较为明显的风载荷所致的振动位移,在频谱图中,观察到在0.39 Hz处存在一个显著的频峰,如图6所示。该频峰与该风机设计的一阶固有频率0.40 Hz非常接近,因此可以高度可靠地将其识别为该风机的一阶固有频率。由于在频谱中不存在高于噪声基准的其他明显频峰,因此无法辨识该风机的高阶固有频率。
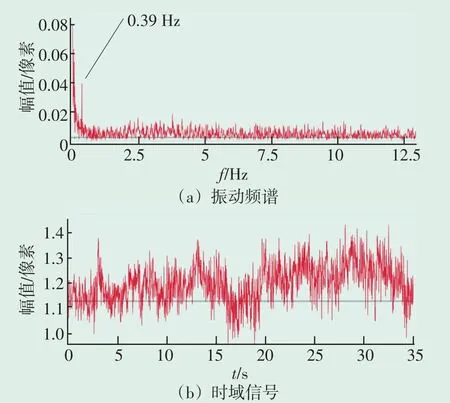
图6 750 kW风机一阶固有频率辨识和测量Fig.6 Identification and measurement of the first order natural frequency of 750 kW wind turbine
4.1.2 2 MW风机
已知待测2 MW风机设计一阶固有频率为0.16 Hz,使用手机+三脚架在距风机20 m 处以30 帧率进行拍摄,拍摄时风机为工作状态,风速3~4 m/s。
在视觉振动分析系统中,选择机舱为测量区,为了互相验证,同时选择塔架中下部分为测量区,并以振动幅值最大的方向(x 轴方向)为测量方向,如图7 所示。由于距离较近,将振动放大比例调节至30%,时域带通为0~10 Hz,对测量区进行处理分析。
经视觉振动分析软件计算,在机舱和塔架测量区域的时域信号中,有显著的风载荷所致的振动位移;在频域中,机舱和塔架于0.157 Hz处均有非常显著的频峰,如图8所示,与该风机设计的一阶固有频率0.16 Hz非常接近,且机舱和塔架测量区的测量结果高度吻合、互相验证,因此可以较高可靠地将其识别为该风机的一阶固有频率。同时,通过观测拍摄视频中风机叶片的通过周期,可知其叶片通过频率为0.32 Hz,与机舱和塔架测量区在0.32 Hz 的相对较小频峰吻合。在频谱中不存在其他显著高于噪声基准的明显频峰,因此无法识别该风机的高阶固有频率。

图8 2 MW风机一阶固有频率的辨识和测量Fig.8 Identification and measurement of the first-order natural frequency of 2 MW wind turbine
4.1.3 6 MW风机
已知待测6 MW风机设计一阶固有频率0.20 Hz,使用手机+三脚架在距风机40 m 处以60 帧率进行拍摄,拍摄时风机为停机状态,风速3~5 m/s。
在视觉振动分析系统中,选择机舱为测量区。由于拍摄地点距离风机较远,视频画幅包括了地面,选择地面为参考区,以验证机舱测量区测量的可靠性,并以振动幅值最大的方向(x 轴方向)为测量方向,如图9所示。将振动放大比例调节至90%,时域带通为0~10 Hz,对测量区进行处理分析。

图9 6 MW风机的测量区和参考区Fig.9 Measurement area and reference area of 6 MW wind turbine
经视觉振动分析软件计算,在时域信号中,参考区(大地)的时域信号幅度小于测量区(机舱)的幅度,说明手机+三脚架在拍摄时受到了较大的风扰动。加之拍摄地点距离风机较远,测量区(机舱)的时域信号并未呈现显著的周期性,如图10 所示。在频谱图中,测量区(机舱)在0.19 Hz处出现明显峰值,参考区(大地)在该频点附近未出现频峰,因此可以判定0.19 Hz 处峰值为该风机机舱自身振动导致,并非风扰动拍摄设备导致。由于0.19 Hz频峰与风机一阶固有频率0.2 Hz 高度吻合,因此可以较高可靠地将其识别为该风机的一阶固有频率。在频谱中不存在其他显著高于噪声基准的明显频峰,因此无法识别该风机的高阶固有频率[7-10]。
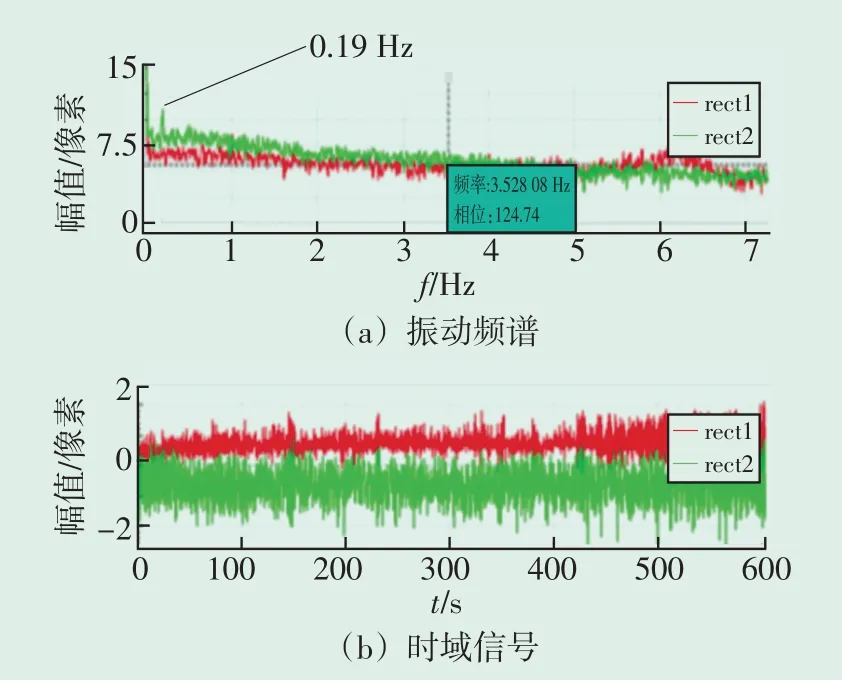
图10 6 MW风机一阶固有频率的辨识和测量Fig.10 Identification and measurement of first-order natural frequency of 6 MW wind turbine
4.2 结论
通过使用视觉振动分析技术对750 kW(小型)、2 MW(中型)、6 MW(大型)三种常见机型的风机固有频率测量分析,得出结论如下。
(1)视觉振动分析技术较容易分辨和测量风机一阶固有频率,但由于更高阶的固有频率振幅小,难以在噪声基准中识别,在后续的测试中,可以尝试采用更高像素的拍摄设备在更近的距离进行拍摄。
(2)在拍摄时,必须使用三脚架,以确保拍摄设备在视频采集时最大可能地保持静止,同时尽可能使用防风罩来阻隔风对拍摄设备的扰动。
(3)距离风机较近的地点拍摄,会得到更大的被测物的图像影像,但近距离拍摄可能无法将参考区(大地)纳入到视频画幅中,需要结合拍摄条件、风机振动幅值大小等因素综合考虑。
(4)使用高像素的拍摄设备会使得每个像素所代表的实际物理尺寸更小,带来更好的处理效果。随着手机、运动相机、监测摄像头等拍摄设备的发展,视觉振动分析技术对风机固有频率测量的准确程度会越来越高。
(5)风机固有频率一般不会超过10 Hz,根据采样定理,理论上监控摄像头(24帧率)所拍摄的视频可以作为分析对象,这为风机固有频率监测提供了新的技术手段。
5 结语
视觉振动分析技术可以以非接触的方式对风电机组进行一阶固有频率测量,测量误差小于1%,满足风电行业对固有频率测量的需求,为风机固有频率测量提供了一个有效、便捷、成本低的新方法。下一步将对更多型号的陆上风机进行测试,并使用振动传感器进行验证,将该技术尽快应用于风电机组的固有频率监测领域中。
猜你喜欢
上海航天(2022年5期)2022-12-05
大电机技术(2021年2期)2021-07-21
测控技术(2018年11期)2018-12-07
系统工程与电子技术(2016年7期)2016-08-21
西北工业大学学报(2015年4期)2016-01-19
石油化工建设(2015年6期)2015-12-01
石油化工建设(2015年6期)2015-12-01
中央民族大学学报(自然科学版)(2015年1期)2015-06-11
电测与仪表(2015年2期)2015-04-09
现代机械(2015年1期)2015-01-15