
空间强约束条件下电涡流传感器特性影响分析
2023-09-23 12:54刘力双
仪表技术与传感器 2023年8期
陈 阳,吕 勇,刘力双
(北京信息科技大学仪器科学与光电工程学院,北京 100192)
0 引言
快速控制反射镜(fast steering mirror,FSM),简称快反镜[1-3]。其基本原理是通过音圈电机驱动反射镜控制光束偏转的角度从而进行位移测量。快反镜具有较快的响应速度、较高的精度及带宽等优点[4]。随着关键技术不断被突破,性能被提高,应用领域更加广阔。作为精密跟踪与瞄准的重要组成部分,快反镜可以精准控制光束指向,在空间激光通信、激光跟踪、光学扫描、光电稳定跟瞄和空间探测等领域都发挥着重要的作用[5-10]。其中快反镜的指向精度受内部位移传感器的测量精度影响,多采用电涡流传感器。
电涡流传感器是一种常用的非接触式位移传感器[11],能够较精准测量出被测物和测头之间的相对位移变化。其具有较好的工作可靠性、较宽的测量范围、较高的灵敏度和分辨率等优点,被广泛应用在快速控制反射镜中,用来测量角度、位移的变化。但是,电涡流传感器在使用过程中其精度仍会受到非线性和温度漂移的影响[12],为此,邱建东等用COMSOL有限元法研究了电涡流传感器内线圈的激励频率、线圈直径以及测头和被测面之间的提离距离等参数对测量结果的影响[13]。崔奇等提出差动式电涡流传感器的设计与实验研究,提高传感器的灵敏度与精度[14-17]。V.Chaturvedi等利用仿真软件研究了在伪差分涡流传感器的电路设计中加入自激振荡电路后改善传感器漂移的情况[18]。H.Y.Wang用电涡流传感器设计了一个金属板防水涡流调高系统,主要介绍了电涡流传感器的检测电路和晶体振荡电路设计方法和基本的电路原理[19]。H.Tsuboi等通过改善多组励磁线圈的分布,获得更高的检测灵敏度[20]。J.G.Vogel等设计了将线圈屏蔽的电涡流传感器,通过实验验证了这种设计可以让传感器获得更高的灵敏度[21]。
电涡流传感器的灵敏度和线性度是重要的性能指标,除线圈几何参数、激励频率和提离距离直接影响传感器的灵敏度,快反镜内部空间受限的强约束条件对涡流传感器参数指标也起重要的作用。因电涡流传感器在使用时需要满足一定条件,金属被测物是圆轴且测头中心线与轴心线正交时,被测面半径大于等于测头半径的3倍。所以在快反镜逐步小型化、智能化、集成化的发展过程中,快反镜内部的电涡流传感器会出现空间强约束的情况,即涡流传感器测头、被测物的空间被音圈电机或柔性支撑挤压,不能满足被测面半径为3倍测头半径,导致传感器的测量性能发生变化。研究金属被测物半径大小对电涡流传感器测量结果的影响,对更高参数的小型化快反镜设计尤为重要。
1 结构及原理
1.1 快反镜的结构及原理
快反镜主要由电涡流传感器、反射镜、音圈电机、柔性支撑、主体支撑组成。其中电涡流传感器可以用来测量反射镜的偏转角度;音圈电机可以为快反镜提供驱动力,驱动镜面偏转进而达到光束偏转;柔性支撑可以使反射镜支架沿其变形方向旋转。快反镜的结构示意图如图1所示。

图1 快速控制反射镜的结构示意图
1.2 电涡流传感器的基本原理
电涡流传感器的原理是采用一种非接触式测量方法,即不需要在金属导体的表面施加外界压力。无器件摩擦损耗,所以有较强的测量优势,被广泛应用于测量位移、厚度、振动和无损探伤等方面。
电涡流传感器是根据涡流效应原理工作的,涡流效应示意图如图2所示,给线圈通入交变电流I1时,线圈的周围会产生交变磁场H1。把一个被测物金属导体放入这个交变磁场,当导体被测物接近或远离线圈,磁通量Φ1改变。根据法拉第电磁感应定律,由于磁场的变化,在闭合导体中感生出电涡流I2,涡流形成新的磁场H2,由楞次定律可知,H2和H1的方向相反,抵消了部分H1的强度,从而导致传感器的参数Z、Q变化[22]。
为了更直观描述电路原理,搭建电涡流传感器的等效模型见图3。把形成的涡流看作短路环中的电流,线圈和被测物形成耦合电感。耦合电感之间的互感系数M受提离距离影响,M随着线圈与被测物间的提离距离δ减小而增大。
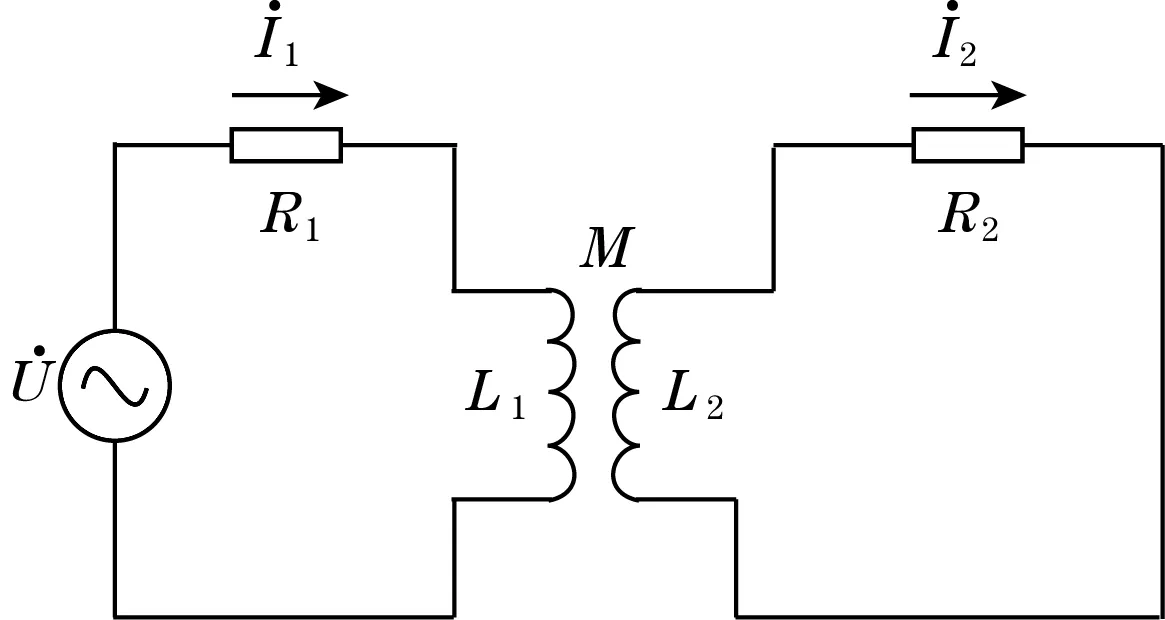
图3 电涡流的等效电路图
由基尔霍夫定律得到下列方程:
(1)

方程解得等效阻抗为
(2)
等效电阻:
(3)
等效电感:
(4)
2 有限元仿真模型建立
2.1 几何建模
建立三维空间模型,创建由电涡流传感器、音圈电机和柔性支撑组成的快反镜实际布局模型。图4为快反镜差动式电涡流传感器的等效模型。此模型传感器的被测面可以旋转,实现传感器角度的测量。
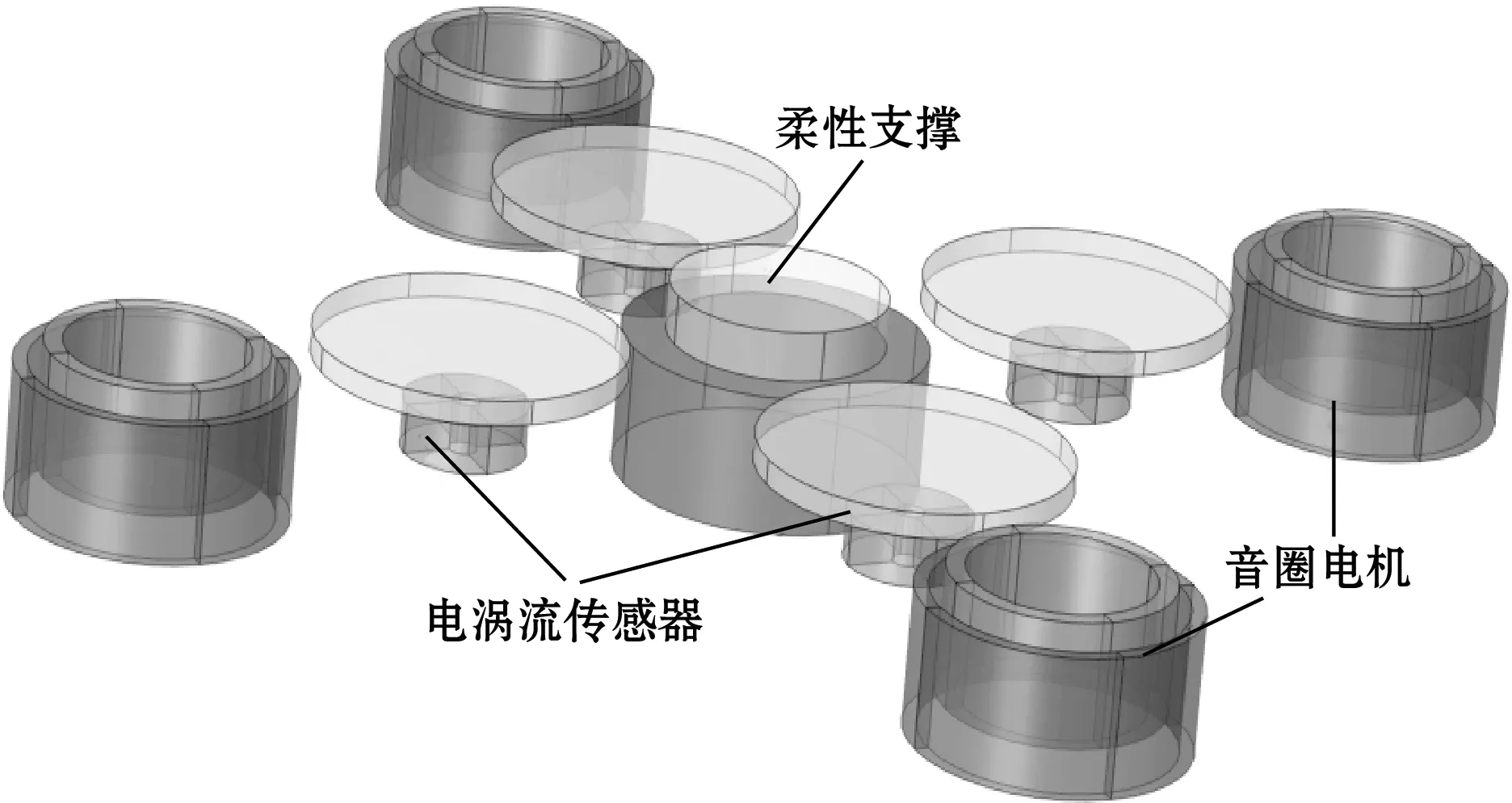
图4 电涡流传感器等效模型图
2.2 材料选择
测头选取的材料为铜,被测面材料为铝,音圈电机内磁钢和线圈分别选材为电工软铁和铜,柔性支撑材料为钢,主体支撑材料为铝,空气域材料为空气,所选材料的具体参数如表1所示。
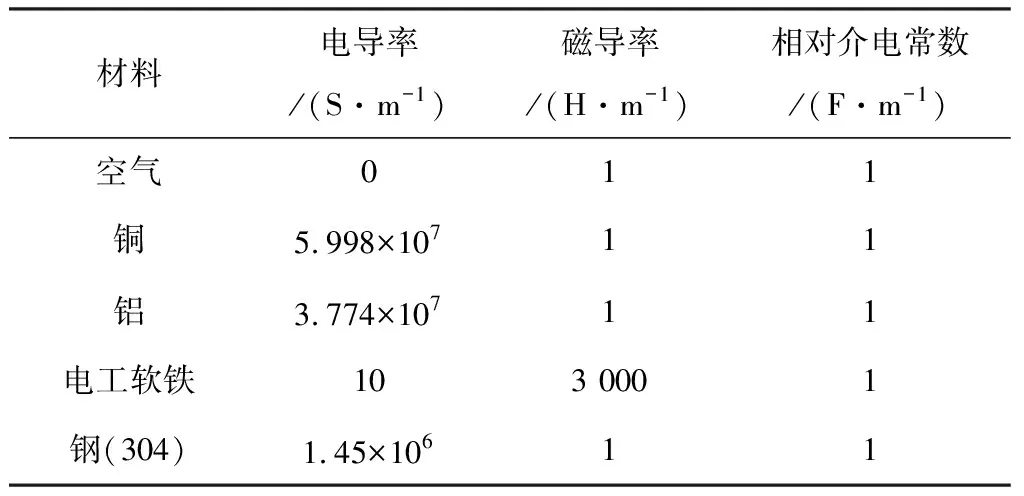
表1 材料参数表
2.3 模型参数选择
快反镜电涡流传感器等效模型各参数值见表2。
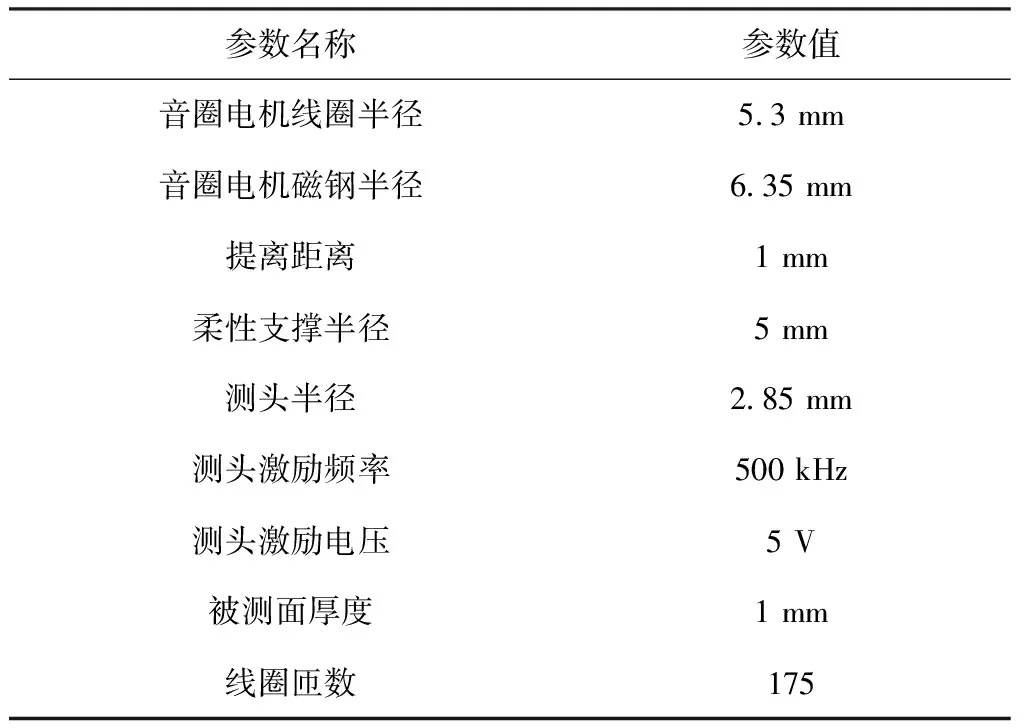
表2 模型参数表
2.4 物理场添加
添加磁场作为物理场。在磁场中添加4个线圈,作为测头X1、X2、Y1、Y2,每个测头均选择均匀多匝线圈导线模型和电路(电流)激励。其中测头导线直径0.06 mm,测头各坐标轴磁矢势为0。
选择电路物理场,添加电压源和接地节点。X1、X2、Y1、Y2测头分别与电阻串联成外部电路,其中X1、X2串联外部电路和Y1、Y2串联外部电路分别形成X轴、Y轴两组差动电路,用来提高传感器的精度。
2.5 网格划分
网格的划分直接影响仿真结果的测量精度,被测物、测头、音圈电机和柔性支撑区域所划分的网格采用细化的自由三角形,空气域采用较粗化的网格,保证较高精度的仿真结果,且运行时间较快。
2.6 研究与求解
对电涡流传感器被测物的旋转角度设置参数a,a的范围为-2°~2°。使用参数化扫描,改变被测面的旋转角度,对不同半径被测物体的快反镜仿真模型逐一进行求解。
3 仿真结果与分析
3.1 快反镜差动式电涡流传感器模型验证分析
建立快反镜差动式电涡流传感器的仿真模型,明确电涡流传感器的被测面被音圈电机和柔性支撑遮挡,未能满足其半径为测头半径3倍时对测量结构的影响,从而把干扰误差降到最低,提高传感器精度。当快反镜差动式电涡流传感器被测面发生角度旋转时,测头输出电压的变化曲线如图5所示。
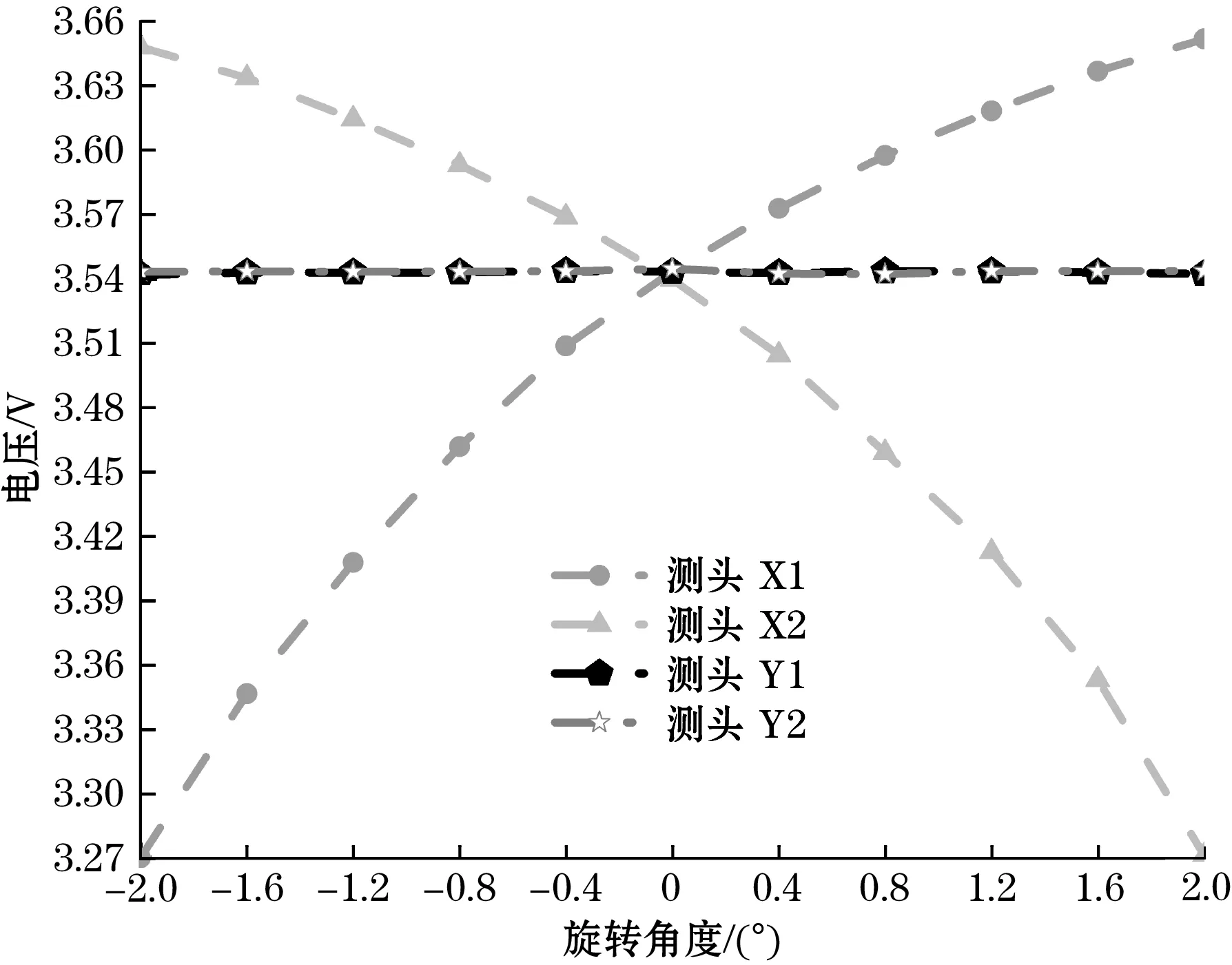
图5 旋转角度与测头输出电压的关系
由图5可以看出,被测物沿Y轴旋转±2°,测头X1接近被测物时测头X2远离被测物,测头X1输出最高电压值时测头X2处于最低电压值。当测头远离被测物时提离距离变大,测头的输出电压减小;当测头接近被测物时提离距离变小,测头的输出电压增大,与电涡流原理推导公式以及实际测量电涡流实验数据一致。当被测面旋转角度为0°时,测头X1和X2与被测物间的提离距离相等,此时电压值也相等。因沿Y轴转动,故测头Y1和测头Y2与被测物的提离距离始终相等,所以测头输出电压VY1=VY2。
3.2 被测面半径对电涡流传感器测量结果的影响
灵敏度和线性度是描述传感器使用性能的2个重要参数,其中灵敏度为传感器在稳定状态下输出与输入特性曲线的斜率。
(5)
式中:K为曲线的斜率;Δy为电压值的变化量;Δx为偏转角度的变化量。
线性度又称为非线性误差,是传感器经过标定后的曲线和拟合直线之间的最大差值与满量程输出之比。
(6)
式中:γ为涡流传感器的线性度;ΔYmax为最大变化量;Y为满量程。
当快反镜中电涡流传感器处于空间强约束条件下,被测面受音圈电机和柔性支撑阻挡,导致被测面半径只能满足为传感器测头半径的1倍、1.5倍、2倍和2.5倍,其中R1=R测头=2.85 mm;R2=1.5R测头=4.275 mm;R3=2R测头=5.7 mm;R4=2.5R测头=7.125 mm;R5=3R测头=8.55 mm。被测面沿Z轴从-2°旋转到2°时,根据测头X1和X2输出的电压差,可求出快反镜中电涡流传感器灵敏度和线性度的变化情况。被测面旋转角度与X轴测头电压差的关系如图6所示。
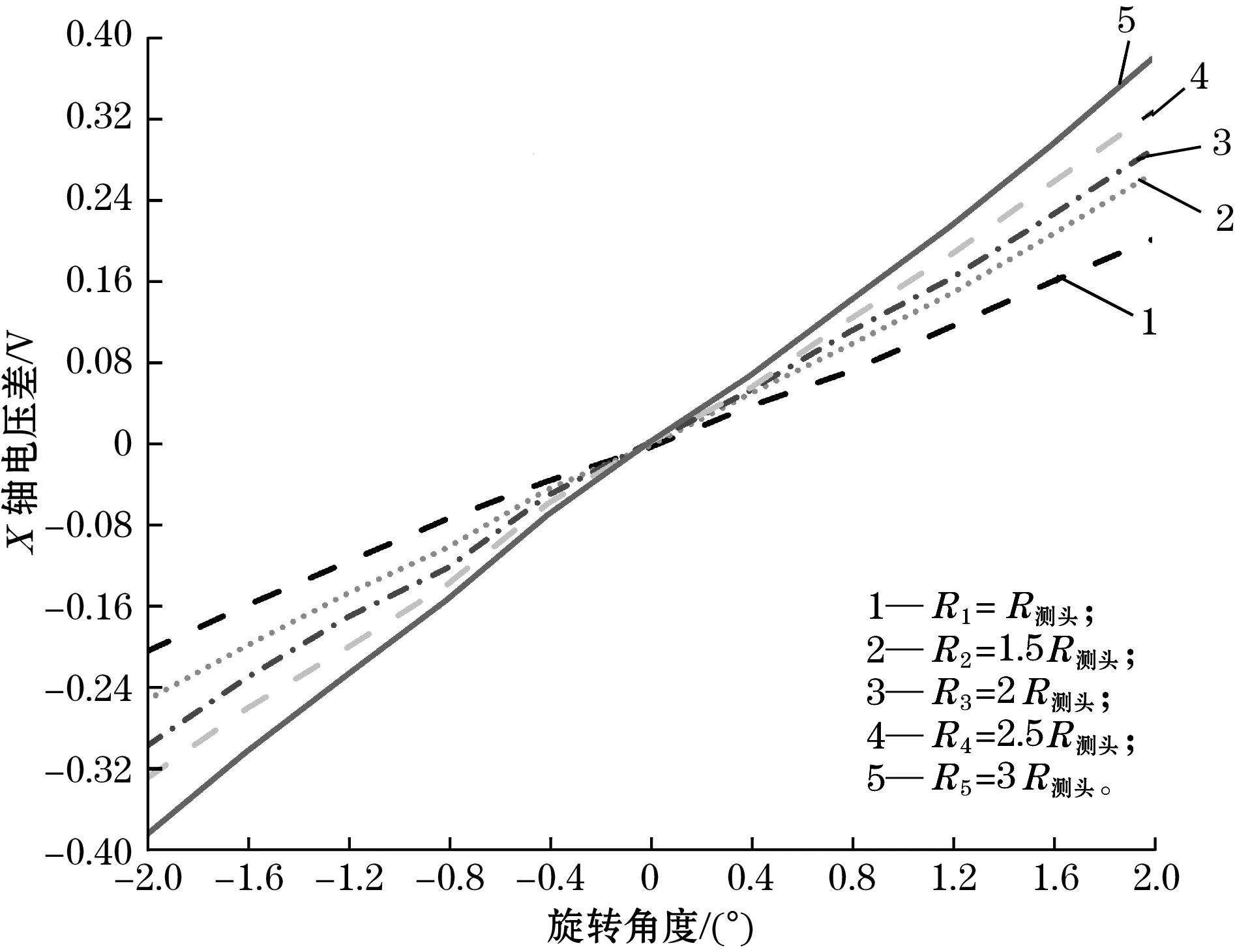
图6 被测面旋转角度与X轴测头电压差的关系
电涡流传感器被测面在空间受限的情况下全行程旋转±2°时,传感器灵敏度和线性度的结果如表3所示。
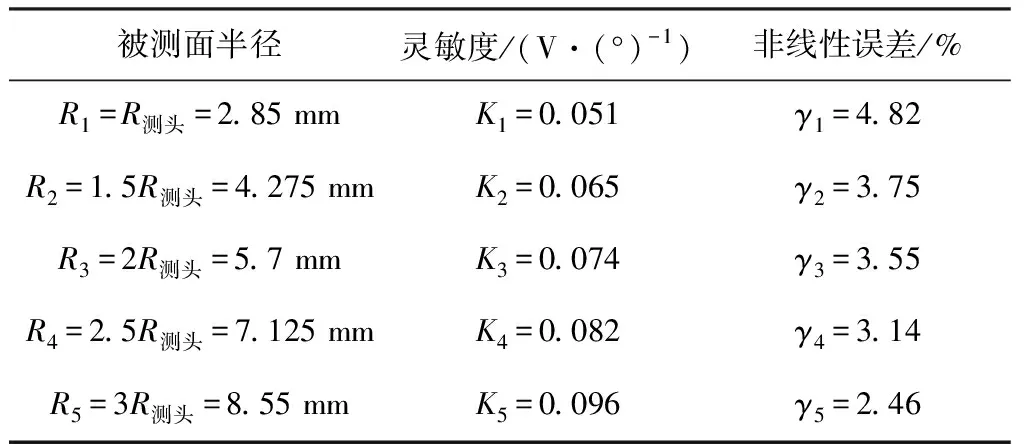
表3 电涡流传感器各性能参数
从实验数据可以看出,被测面半径会影响电涡流传感器测量结果的灵敏度和非线性误差。当快反镜内部空间不受约束,可以保证被测面半径等于3倍测头半径时,涡流传感器的灵敏度为0.096V/(°),非线性误差为2.46%;空间狭小被测面半径只能达到1倍测头半径时,传感器的灵敏度减小了47%,非线性误差增大了96%,线性度变差。X轴测头电压差变化趋势并没有发生改变,仍随着角度的变化保持单调递增,可以对线性度进行校正从而实现快反镜电涡流传感器的角度测量。传感器灵敏度和线性度的改变,会影响传感器的测量精度。在实际测量时,音圈电机和柔性支撑距离电涡流传感器过近导致被测面大小受限是影响灵敏度和线性度发生较大变化的原因之一。在快反镜逐渐集成化、小型化的发展进程中,快反镜空间强约束条件下会对电涡流传感器产生较大的影响。
4 结论
文中基于电涡流传感器在空间强约束条件下存在的问题,系统分析了电涡流传感器被测面处于狭小空间内,不能满足其半径为测头半径3倍时对电涡流传感器测量结果的影响。结合快反镜和涡流传感器的结构组成、工作原理以及数学模型,使用有限元仿真建立由电涡流传感器、音圈电机和柔性支撑组成的快反镜模型,分析不同半径的被测面发生角度旋转时测头输出电压的变化曲线,结果表明当被测面半径满足3倍测头半径时,电涡流传感器灵敏度和线性度达到最优值;随着被测面半径的减小,涡流传感器的灵敏度降低,非线性误差增大,线性度变差。当被测面只能满足1倍测头半径时,电涡流传感器的灵敏度降低了47%,非线性误差增大了96%,但X轴输出电压差与角度的变化曲线总体趋势仍从-2°到2°单调递增,电涡流传感器能够保证正常的测量使用。在实际工程中,可以用标定来改善传感器的精度。本文为快反镜小型化的发展提供参考。
猜你喜欢
现代仪器与医疗(2021年1期)2021-06-09
装备制造技术(2020年11期)2021-01-26
制造技术与机床(2018年12期)2018-12-23
测控技术(2018年1期)2018-11-25
电子测试(2018年18期)2018-11-14
传感器与微系统(2018年7期)2018-08-29
通信电源技术(2018年5期)2018-08-23
成都信息工程大学学报(2017年1期)2017-07-21
探测与控制学报(2015年4期)2015-12-15
汽车科技(2014年6期)2014-03-11
