基于零动态和超扭曲的双馈风机暂态控制策略
2023-09-22 03:58张晓英舒子江吴宏强
深圳大学学报(理工版) 2023年5期
张晓英, 舒子江, 吴宏强
1)兰州理工大学电气工程与信息工程学院,甘肃 兰州 730050;2)甘肃电通电力工程设计咨询有限公司,甘肃 兰州 730050
伴随全球气温逐渐升高和自然环境不断恶化,实现“碳达峰”、“碳中和”对人类的健康发展具有重要意义[1-2].根据全球风能理事会(Global Wind Energy Council, GWEC)的数据,2021 年全球风电装机新增93.6 GW,其中,中国占比50.91%[3].风电大规模接入电网对现有电力系统安全稳定运行带来巨大的挑战.双馈风机作为风力发电的主流机型之一,提升其故障穿越能力对提高风电并网稳定性具有重大意义[4].
国内外学者对双馈感应发电机(doubly-fed induction generator, DFIG)的故障穿越策略做了大量研究.周临原等[5-6]采用加速定子直流磁链衰减的去磁控制策略,通过加速暂态分量的衰减使暂态过程显著缩短,提高了DFIG 的故障穿越能力.PADHY 等[7]基于改进灰狼优化算法设计了一种自适应模糊比例-积分-微分(proportion integration differentiation, PID)控制器,这种控制器能快速优化PID控制参数,在非线性系统里也能取得较好的动态效果.姜惠兰等[8]依据定子电流微分的d 轴和q轴分量与转子感应电动势的d轴和q轴分量对应成正比的规律,设计出一种基于定子电流微分的前馈控制器.这种方案实现简单,能较好地抑制故障期间的转子过电流,实现故障穿越.上述控制器本质上都是在常规PID控制基础上进行改进,如增加去磁、前馈环节,或采用智能算法对模糊PID的参数进行优化.这些措施能在一定程度上提升系统的故障穿越能力,但因没有考虑系统本身的非线性特性,由此会产生在严重故障扰动下动态响应不足的问题,换流器能力也没有得到充分利用.
近年来,有学者开始转向风机故障期间的非线性控制研究[9].与传统线性控制策略相比,非线性控制策略的控制带宽很大,可以实现对被控量的有效控制[10].WU等[11]基于微分几何理论提出一种精确线性化的非线性控制器,提高了系统的暂态稳定性,但该方法设计出的控制率相当复杂,因此不利于实际应用.马晓阳等[12]基于李雅普诺夫稳定判据提出了一种网侧变流器的非线性控制器,有效地抑制了直流母线的电压波动,但无法保证故障期间的无功输出.孙丹等[13]提出一种反推直接功率控制,与传统比例-积分(proportion integration, PI)控制相比,该方法每个控制器只需调节1个参数,就能实现良好的稳态和动态性能以及保持恒定的开关频率,但这种方法的稳态误差会随着系统参数的变化而变大,其参数鲁棒性欠佳.邓三星等[14]基于状态相关黎卡提方程提出非线性状态调节器,能在暂态期间将状态变量调节至原平衡点附近,但这种控制方法对模型的精度要求较高,且没有考虑实际运行过程中存在的误差.
针对现有DFIG故障穿越控制策略存在的问题,本研究设计了一种参数自适应超扭曲滑模控制(super-twisting adaptive sliding mode control,STASMC)改进的零动态(zero dynamics, ZD)控制器来提高DFIG故障下的暂态性能.先使用ZD方法通过部分反馈线性化来计算出系统的控制率,避免了由于将系统精确线性化而导致的控制率复杂的问题.然后使用STASMC方法计算辅助输入进一步提高系统的动态性能,降低了由于运行误差或参数变化对控制带来的影响,增强了控制策略的鲁棒性.仿真算例分析了三相短路故障下风机的故障穿越能力,验证本研究控制方法的良好性能.
1 DFIG电磁暂态模型
双馈式感应发电机主要由风力机、齿轮箱、感应发电机、背靠背变流器和控制系统组成[15],带Crowbar保护的双馈风机结构示意图如图1.

图1 带Crowbar保护的双馈风机结构Fig.1 Doubly-fed induction generator with Crowbar protection.
忽略定子磁链动态,DFIG的三阶模型[16]为
其中,H为惯量常数;s为转差率;rs为定子电阻;X=ωsLss为定子电抗,ωs为同步角速度,Lss为定子自电感;X′=ωs(Lss-/Lrr)为定子暂态电抗;Lrr为转子自电感;Lm为励磁电感;T′=Lrr/rr为转子短路时间常数;E′d和E′q分别为d、q 轴暂态电动势,与转子磁链成正比;Udr和Uqr分别是转子换流器输出的d、q 轴电压;Uds和Uqs分别是定子d、q 轴电压;Ids和Iqs分别是定子d、q轴电流;Ps和Qs分别为DFIG 发出的有功功率和无功功率;Pm为风力机发出的机械功率.
从式(1)可见,DFIG的三阶模型是一个非线性模型,若要提升控制策略的暂态性能,则需要考虑系统的非线性特性.
2 基于零动态方法的控制策略
本研究采用零动态方法[17-18]设计DFIG 控制器,与精确反馈线性化(exact feedback linearization,EFL)[14]相比,该方法不需要对所有系统的状态进行精确线性化.通过坐标变换和状态反馈将非线性系统部分线性化,在内部动态即零动态稳定的前提下,对线性化子系统进行最优控制器设计,最终得到能够镇定全系统的非线性控制律.
零动态方法的基本思想是求出一种使得控制系统满足输出响应y在任何t≥0的时刻都等于0的控制律u.然后判断在这个控制率的控制下系统的零动态方程组的稳定性.零动态在方程组中表征系统的内部动态特性,若系统的零动态是稳定的,则原系统的内部动态稳定和外部输出都是稳定的,则系统是稳定的.
按如下步骤设计DFIG的零动态控制器[19].
步骤1:写出DFIG的状态空间表达式
将式(1)的平衡点移到原点,忽略定子电阻rs,可得[14]
其中,
其中,E′de和E′qe分别为d、q 轴暂态电动势的稳态值;Udse、Uqse和se分别定子d、q轴电压和转差率的稳态值;ΔE′d和ΔE′q分别为d、q轴暂态电动势的扰动值;ΔUds、ΔUqs和Δs分别为定子d、q 轴电压和转差率的扰动值;x=[ ΔsΔE′qΔE′d]T为状态变量;u=[u1u2]=[ ΔUdrΔUqr]T为控制变量.
输出函数h=[h1h2]T=[ ΔPsΔQs]T.ΔPs和ΔQs为
步骤2:计算相关度
为了确保在此非线性系统上能应用零动态控制,需先计算原系统的相关度.每个输出yi=hi(x)的关系度表示为ri.由式(2)和式(3)可得,
且式(5)所示的矩阵为非奇异矩阵,
其中,为hi(x)对f(x)的ki阶lie 导数再对gj(x)求lie 导数.因此可得:r1= 1,r2= 1,则系统的总关系度rsystem=r1+r2= 2.可知系统的总关系度小于系统阶数.因此,对于给定的输出函数,系统可以被部分线性化.
步骤3:非线性坐标变换
很明显,g(x) =[g1(x)g2(x) ]是对合[19]的,因此能找到一组微分同胚映射z=[φ(x)η(x) ]T将原非线性系统线性化.
当r1=r2= 1,rsystem= 2时,z=Φ(x)可写为
由于rsystem小于系统阶数n,所以z=Φ(x)中还包含了待定的n-rsystem= 1个坐标映射关系,即η=[η1η2…ηn-rsystem]T,这个坐标映射关系须满足
1)向量函数z=Φ(x)在x= 0处的雅可比矩阵是非奇异的.
2)由于g(x) =[g1(x)g2(x) ]是对合的,所以η=[η1η2…ηn-rsystem]T还需满足
经过微分同胚映射z=Φ(x),式(2)所示的系统可转化为
将原系统的输出函数和关系度代入式(8),可得
其中,
向量x和向量z之间的转换关系如式(6).
输出方程可写为
零动态方法最重要的特点是能够设计控制律u使得系统输出y(t)在t≥0时输出保持为0.这就意味着
所以作为控制的结果,x(t)应满足下列约束条件
由式(6)可知,式(12)意味着对于任何t≥0的时刻有
进而有
在这种情况下,式(8)中żi均等于0,其中,i=1,2,…,r1+r2,则动态方程组为
式(15)所示的动态方程所描述的是系统的内部动态特性,被称为零动态方程组.系统的外部输出在零动态方法所给出的控制率的作用下恒等于0,如果此时零动态方程组也是稳定的,则整个系统也必然是稳定的.
步骤4:内部动态特性稳定性判别
由上述分析可知,零动态方法将DFIG 这个系统的动态行为划分成了外部动态和内部动态两个部分.对外部动态而言,在任意时刻保持系统的输出为0有两层含义:其一是系统的外部动态为渐近稳定的;其二是系统的输出具有最优的动态品质.因为0必然小于或等于二次型性能泛函的极小值,故y(t) =h(x(t)) = 0 的指标一定是一种最优指标.若系统的内部动态也是稳定的,则整个系统就是稳定的,且输出量的动态性能最优.下面对系统的内部动态的稳定性进行判别.
为满足式(7)所示条件,取η1为
则可以推出
根据z=Φ(x)将式(17)中的x转换成z有
进一步可以写出系统的零动态为
很明显,系统的零动态是渐近稳定的,所以整个系统也是渐近稳定的.因此,可以用零动态方法计算出DFIG的控制率.
步骤5:零动态控制率的得出
由式(8)中关于φr1和φr1+r2的两个方程可以得出
将上式写成矩阵形式为
令
式(21)是以坐标z为变量表示出的控制变量uˉ(z),而实际上零动态控制器需得出的是状态反馈控制率u(x).将式(21)中所有向量中的z以z=Φ(x)取代得到
其中,
然后对式(23)进行求解就能得到所求的零动态方法的控制率u=[u1(x)u2(x)]T.
在实际的控制工程系统中,使得系统输出在任何时刻皆等于0的条件只是设计时所采用的一种希望达到的指标,它表达的是使输出量在控制作用下长期保持其最小值[20].由于实际控制系统中还存在许多其他因素,如控制量或系统某些环节中的时延特性、微小的死区、控制量的限幅特性以及系统某个或某些参数本身的非线性特性(如电抗的饱和特性),还有建模误差和控制器量测环节的误差等[19].这些误差在设计中都未加以考虑,而它们的存在会使得y(t) = 0,t≥0 的期望难以真正实现.因此,需要采用一定的策略减小这些误差的影响,进一步提高零动态方法的暂态性能.为此,本研究构造了1 个辅助输入v(x) =[v1v2]T,辅助输入将跟踪输出误差的实时变化,并通过一定的策略降低其影响.加入辅助输入后,式(23)将变为如式(25)的形式.
辅助输入的意义在于零动态方法计算出的控制率的基础上再增加一个分量来抵消功率波动带来的影响.
3 超扭曲自适应滑模控制
超扭曲滑模策略是一种二阶滑模控制方法,控制过程中只需要滑模面的信息,就可以实现滑模面及其导数同时到达零点[21].SHTESSEL 等[22]提出一种超扭曲自适应滑模控制(super-twisting adaptive sliding mode control, STASMC)方法,可根据状态变量离滑模面的距离动态计算参数,一定程度上加快了系统的动态响应速度和缓解了滑模控制的抖动问题,且不需要滑模变量的导数,从而简化了控制器结构[23].因此,本研究采用STASMC方法保证实际系统输出yreal与参考模型输出y之间的精确跟踪.
由于系统的状态变量最终要进入滑模面中,滑模面的不同体现了系统控制目标的不同[10].为提高有功功率和无功功率输出的稳态和动态性能,将滑模面选择式(26)[24]形式
其中,kp和kq分别为有功和无功功率的积分系数,其值可参照文献[18]中功率外环的PI 控制参数选取;ep和eq分别为有功和无功功率的扰动值,即
使用超扭曲滑模控制时,可将系统的辅助输入[v1v2]T[21-22]设计为
其中,v1i和v2i定义为
其中,sign()为符号函数.
为保证系统的Lyapunov 函数的导数小于0,按式(30)计算系数λ1和λ2,该适应率的有限时间收敛性和稳定性已得到验证[22,25].
其中,ω、μ、ε和λm都为任意正参数;ω为自适应的调整速度;μ通过与滑模参数si的绝对值做差,在滑模面附近构造一个很小的邻域,当系统状态处于这个邻域之内时,即|si|≤μ,λ1和λ2开始慢慢变小,减缓了系统状态达到滑模面后的抖动现象.当外界存在较大扰动时,系统状态离开了这个邻域,即|si|>μ,λ1和λ2开始变大,加速使系统状态靠向滑模面.为获得较好的性能,将控制参数设置为ω= 139.3,μ= 0.15,ε= 1,λm= 0.01.
依据式(28)计算出辅助输入[v1v2]T后,最终的控制率可由式(31)得出
4 仿真分析
使用Matlab 中Simulink 搭建双馈风机的仿真模型,其接线图如图2.

图2 仿真模型接线图Fig.2 Wiring diagram of simulation model.
双馈风机经箱式变压器、集电线路、集中变压器最后与电网相连.双馈风机的详细参数和仿真模型其余部分的参数如表1.

表1 双馈风力发电机和风电场内设备参数Table 1 Parameters of DFIG and equipment in wind farms
箱式变压器和集中变压器之间的联络线长度为30 km,在距离箱式变压器10 km 的位置设置三相短路故障,如图2,故障在15 s 时发生,持续0.15 s后故障切除.故障前后风速不变,为9 m/s.故障期间对风机分别采用带前馈的PI 控制、ZD 控制和本研究的ZD-STASMC 控制.根据文献[26]进行相关计算得到PI 控制器的参数Kp= 0.58、Ki=491.6.各电气量对比波形如图3.
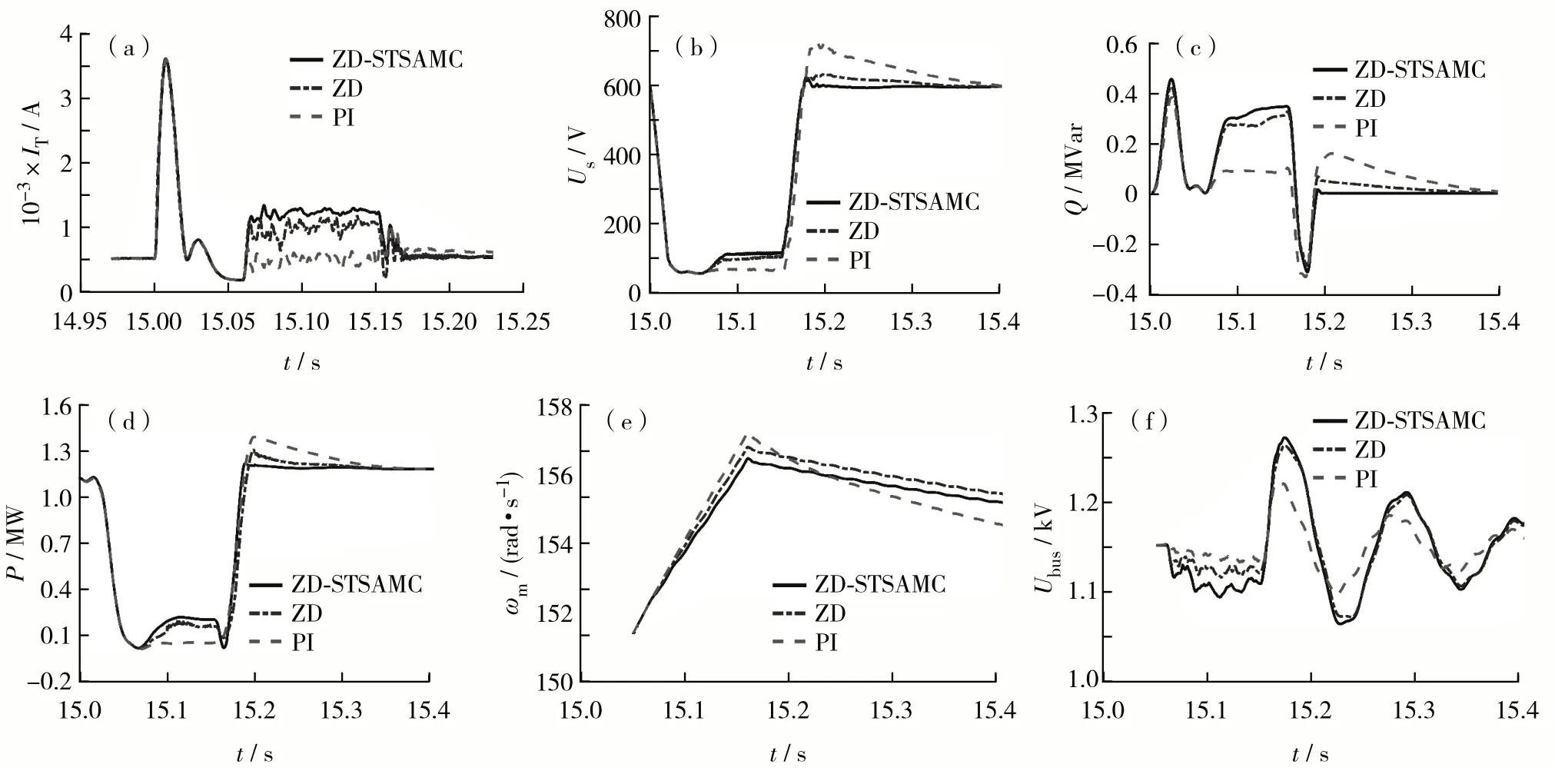
图3 三种控制策略仿真波形图 (a) 转子电流; (b) 机端电压; (c) 无功功率; (d) 有功功率; (e) 风机转子转速; (f) 直流母线电压Fig.3 The contrast waveforms of three control strategies. (a) Rotor current, (b) terminal voltage, (c) reactive power, (d) active power, (e)rotor speed of DFIG, and (f) the voltage of the DC bus by ZD-STSAMC control strategy (solid line), ZD control strategy(dash-dotted line), and PI control strategy (dashed line).
故障前期,Crowbar 电路投入保护变流器,15.06 s 后Crowbar 电路切除,3 种控制策略自动投入开始进行故障期间的控制.
暂态期间转子电流IT的响应情况如图3(a),3种控制策略的转子电流都小于1 760 A,即都在安全范围内,但是相比ZD和ZD-STASMC方法,控制策略故障时的转子电流大于PI 控制,这意味着转子侧变流器在故障期间的输出能力得到了更好地利用.此外,由于超扭曲滑模控制的加入,故障期间ZD-STASMC控制转子电流的波动有效减小.
由图3(b)和(c)可知,机端电压Us跌落后3 种控制策略都能向电网发出无功功率Q支撑电压,ZD-STASMC控制策略和ZD方法相比于PI控制在故障期间能发出更多的无功,因此电压跌落程度也更低.故障切除后,由于PI 控制响应过长导致故障切除后仍控制风机发出无功进而引起端电压上升.而ZD-STASMC控制策略和ZD方法拥有更好的暂态性能,故障切除后能快速降低无功功率的发出,减小了电压升高的幅度,避免了低高电压连锁故障的出现.
图3(d)和(e)表征了故障期间有功功率P和转子转速ωm的变化情况.故障发生后,DFIG 发出的电磁功率降低,转子转速上升.为避免风机转速过快,3 种控制策略都控制风机发出有功功率,但ZD-STASMC控制策略和ZD方法较PI控制效果明显更好.故障期间,直流母线电压Ubus都低于1 380 V,都处于安全范围,如图3(f).
图3 表明,在ZD 方法的基础上引入超扭曲自适应滑模控制能进一步提高控制策略的暂态性能并降低故障期间的功率波动,证明了超扭曲自适应滑模控制在提升暂态性能和平抑输出波动的有效性.本研究ZD-STASMC控制策略相比于ZD方法和PI控制有着更加良好的暂态控制性能,在一定程度上避免了低高压连锁故障的出现,降低了故障期间DFIG脱网的风险.
4 结 论
采用一种基于零动态方法和超扭曲滑模控制的非线性控制策略提升了DFIG 的故障穿越能力.通过分析可得:
1)与传统的PI控制相比,ZD-STASMC控制策略能更有效地减小电压跌落程度和减小转子转速升高的程度.此外,ZD-STASMC 控制策略有较快的响应速度,能在故障切除后快速减小无功功率的发出,避免了由于无功过剩而引起端电压升高的现象.
2)相比精确反馈线性化控制方法,本研究提出的ZD-STASMC 控制策略不需要将原非线性系统完全精确线性化,它允许将原系统模型转化为部分线性系统,在设计时也无需验证全模型的动态稳定性.简化了控制设计任务,减小了控制过程中的计算成本.
3)与ZD方法相比,超扭曲滑模控制的加入使得ZD-STASMC 控制策略更加充分地利用了变流器的输出能力,降低了故障期间转子电流的波动,提高了故障期间发出的无功功率,减小了机端电压的跌落程度,提高了DFIG的故障穿越能力.