一种变换通讯的无人机集群鲁棒包含控制方法
2023-09-22 12:44班永鑫叶永强
宇航学报 2023年8期
班永鑫,叶永强
(南京航空航天大学自动化学院,南京 211106)
0 引 言
伴随通信效率的提高和无人机制造成本的降低,无论在民用领域还是军事领域,多无人机集群的协同可以胜任更多的工作,多机问题的研究也逐渐成为热点。在信息化、智能化、无人化战场环境下,飞行器集群因具有作战能力强、体系生存率高以及攻击成本低等诸多优势,受到世界各国的青睐[1-5]。这同时也对无人机集群系统的路径规划、障碍躲避等方面提出了更高的要求。如在俄乌战场上,数十架甚至数百架自杀式无人机同步出击的场景屡见不鲜,相对于单一战斗部的常规弹药,无人机集群攻击具有进攻成本低、防御成本高、攻击面广、目标分散等优势。这些无人机集群系统由相当多个简单的无人机和一些简单的作用规则及结构拓扑组成,通过集群内多机通讯协调来共同完成系统目标,其集群系统具有自主性、分布性、协调性。无人机系统的包含控制是一种编队控制问题,其主要目标是构造单个无人机与其邻居无人机之间的分布式控制协议,一部分领导无人机形成一个几何队形,其余的跟随无人机最终进入到由领导者形成的几何队形中,以实现距离保持、避免碰撞等控制要求。
目前,关于无人机集群包含控制的设计方法已经得到发展,文献[2-3]分别提出多无人机编队分组覆盖路径规划算法和集群对抗多耦合任务智能决策方法,但对系统抗干扰的鲁棒性能缺乏分析;文献[4]建立了领导-跟随编队模型和无人机运动模型,并设计内环鲁棒控制律对编队外环控制产生的指令信号进行跟踪,但并没有考虑集群通信拓扑切换的情形;文献[5-6]均针对切换拓扑下多机编队的跟踪控制展开研究,但均未考虑到实际场景下的失效、故障等扰动问题给系统的干扰和抑制问题。
无人机集群的合围控制问题,其本质是一种多个自主独立的个体组成集群的包含控制,目前该领域已经有诸如李雅普诺夫、图论、线性矩阵不等式、解耦合、离散时间、鲁棒H∞控制等较多研究。文献[7]针对固定有向拓扑下连续时间和离散时间的包含控制问题进行了研究;文献[8]研究了时变时滞二阶无人机集群系统的包含控制问题,给出实现包含控制应满足的拓扑结构、反馈增益和时滞上界。文献[9]对比分析了有时滞和无时滞情况下多智能体网络的稳定性,文献[10]给出了具有非凸约束的二阶分数阶离散时间多智能体系统实现包含控制的充分条件,但没有给出相应的实现算法。
当内部完全自由通讯的无人机集群出发时,由于个体故障导致集群通讯失能的代价太大,因此集群必须有随时变换通讯的能力以应对个体的失效。变换通信拓扑下无人机集群系统的动力学行为更加复杂,文献[11-12]解决了有向拓扑结构切换问题,并将其拓展到非凸受限情况和任意有界大时滞情况。文献[13]进一步分析了拓扑结构与达成一致性的效率之间的关系,表明该关系趋向于正比例。文献[14-15]在考虑时滞的情况下,研究了二阶多智能体系统拓扑结构固定及切换情况下的分布式一致性问题,并给出系统收敛的一致性条件。
本文的主要贡献是研究了变换通信拓扑下二阶无人机集群系统鲁棒L2-L∞包含控制问题,并给出了相应的控制算法。不同于切换拓扑的情况,文献[16-17]仅针对通信变化的情况进行了研究;虽然文献[18]研究了在随机切换有符号交互拓扑的线性多智能体系统的鲁棒均方一致控制问题,但不适用于系统非线性的情况。文献[19]针对受参数不确定性和外部干扰影响的均匀线性多智能体系统(MaS),提出了两种分层控制的鲁棒控制设计。文献[20]利用双线性矩阵非等性式合成了线性参数变化多智能体系统邻接矩阵的非线性规划边权值。文献[19-20]中的参数不确定性不同于拓扑结构的切换,因此不适用于变换通信拓扑的情形。文献[14-15]中的分析方法也不能直接应用于本文的无人机集群控制场景。为了解决变换通信拓扑情况下的编队鲁棒包含控制问题,本文首先提出了一种针对跟随者无人机的非线性投影控制算法;然后,通过引入模型变换,将原模型进行转换,基于李雅普诺夫稳定性方法及鲁棒控制等理论知识,利用微分方程求解方法,结合比较定理,分析单个无人机、无人机间的运动轨迹趋势,尽可能抑制外部扰动给无人机集群系统带来的振荡,最终所有跟随无人机收敛到由领导无人机构成的物理区域。
1 系统模型及算法描述
本文所研究的无人机集群系统由M个无人机构成,其均为二阶连续结构,即n个跟随无人机和M-n个领导无人机,其中假设先期到达指定位置,并在跟随无人机到达前保持其位置固定。其中,跟随无人机集群为F={1,2,…,n},领导无人机集群为YL={n+1,n+2,…,M},因此,跟随无人机可分别表示为f1,f2,…,fn,领导无人机可分别表示为ln+1,ln+2,…,lM。每个智能体在图G=G1∪G2∪…∪Gm中用节点来进行表示,Ni={j∈V(Gk)|(j,i)∈E(G),Ni=k∈{1,2,…,m}}表示图Gk中节点i的邻居集合,即无人机i在第k种拓扑连接状态下能接收到Ni集合中各无人机的信息。此外,每个无人机基于Ni集合中所接收的邻居无人机信息来更新当前的状态信息,这意味着并非每个智能体均能实时接收到YL={n+1,n+2,…,M}中领导无人机的信息。
考虑每个跟随无人机的二阶动力学模型如下:
(1)
式中:跟随无人机i∈F={1,…,n},xi(t),vi(t)和ui(t)分别表示在t时刻第i个无人机的位置状态、速度状态和控制输入;wi(t)是t时刻第i个无人机对应的外部扰动,且wi(t)∈L2[0, ∞)。
考虑给定的凸包Y⊆RM-n为领导无人机位置状态xln+1,xln+2,…,xlM的线性组合,可表示为如下形式:
(2)
本文旨在设计合适的分布式控制律,基于各无人机间的信息交互,使跟随无人机群在位置状态和速度状态上进入给定的凸包Y⊆RM-n中,进而实现包含控制。并且在所有跟随无人机进入领导无人机集群所形成凸包Y⊆RM-n的同时,无人机集群系统需要满足的L2-L∞性能指标如下:
(3)

(4)
式中:c1为给定的正实数;PY(η)表示向量η在非空闭凸集Y上的最小投影;y(ηi(t))描述了无人机集群系统中无人机i位置状态或速度状态到非空闭凸集Y的最大距离;y(ηi(t))反映出外部扰动w(t)对于各无人机进入给定凸包Y⊆RM-n的影响。
本文旨在设计合适的分布式控制律,实现无人机集群变通信拓扑结构下的鲁棒L2-L∞包含控制,即跟随无人机在位置和速度状态上都进入给定的非空闭凸包Y⊆RM-n中,且满足L2-L∞性能指标。
因此,本文设计的分布式控制律如下:
βi(t)[xi(t)-PY(xi(t))]
(5)

为便于后续用数学方法进行解耦分析,对系统(1)进行变换,其变换算法如式(6)所示:
(6)
(7)
因此,后续将转而讨论控制律(5)使模型转化后的系统(7)进入领导无人机集群所形成的凸包进而实现包含控制,并将进一步探讨系统是否满足L2-L∞性能指标。
2 主要定理
假设1.针对通信拓扑切换的情形,考虑一个非空闭集连续时间序列[ts,ts+1),s∈N,即s=0,1,…,n。式中:t0=0, 0≤ts+1-ts≤T,T为正实数。在每个时间序列[ts,ts+1)中,包含如下时间子序列:
[ts0,ts1), [ts1,ts2),…,[tsm-1,tsm),
ts0=ts,tsm=ts+1
当m≥1时,tsd+1-tsd=λ,d=0,1,…,m-1成立,λ为正实数。通信切换拓扑图在每个时间点tsd进行切换,且在时间间隔[tsd,tsd+1)维持当前通信形式。
在通信拓扑集合G中,每个时间间隔[tsd,tsd+1)内,每个跟随无人机i至少有一条与领导无人机相连的通路,且无人机ij能接收到Nij集合中各无人机的信息(不存在孤立点),即αijif(tsd)>0。亦即每个时间间隔[tsd,tsd+1)内,跟随无人机能够直接或间接地获取领导无人机的状态信息。

(8)


(1)当u(x)为右行最小解或v(x)为右行最大解时,那么在x∈[x0,b)区间,u(x)≤v(x)成立;在x∈(a,x0]区间,u(x)≥v(x)成立。
(2)当u(x)为左行最大解或v(x)为左行最小解时,那么,在x∈[x0,b)区间,u(x)≤v(x)成立;在x∈(a,x0] 区间,u(x)≥v(x)成立。
引理4.假设有矩阵M,A,B,及与时间参数t相关的向量δ,w,如果对式V=δTMδ存在以下关系:
(9)
则上式函数V的对t导数可以表示如下:
(Aδ+Bw)=δT(ATM+MA)δ+wTBTMδ+δTBw
(10)
引理5.对于无人机集群系统(7),基于假设2,其系统的位置状态对于极小的时间间隔Δt,满足以下不等式:
||xi(t+Δt)-PY(xi(t+Δt))||≤(1-kiΔt)·
(11)
其系统的速度状态满足:
(12)
式中:
(13)
证.针对模型(1)引入ki转化后的系统(7),基于导数的性质,可得下式成立:
(14)
即有
(15)
式中:ki=bi+ri为正实数,其详细定义与式(6)一致,且有1>1-kiΔt>0, 1>kiΔt>0,且(1-kiΔt)+kiΔt=1。根据式(15),结合引理2,可以推导得出:
||xi(t+Δt)-PY(xi(t+Δt))||≤(1-kiΔt)·
(16)
同理,基于模型转化后的系统(7)及导数的性质,可得式(17)成立:
PY(xi(t))+0
(17)
也即,有式(18)成立:
(βi(t)/ki)ΔtPY(xi(t))]
(18)

(19)
在假设2中,有:

(20)
可推导出即有式(21)成立:
(21)
此外,通过观察式(21),可得出:
(22)
由于PY(xi(t))∈Y,基于投影算子的性质:向量xi(t)到非空闭凸集Y的一次投影与二次投影相等,即有PY(xi(t))-PY(PY(xi(t)))=0成立,根据式(18)、(21)和(22),结合引理2,可以推导得出系统的速度状态项性质如式(23):
a2i||xi(t)-PY(xi(t))||+a3ij||xj(t)-
PY(xj(t))||
(23)
定理1.在变换通信拓扑图G中,针对动力学方程(1),通过设计合适的控制律(5),如果存在正定矩阵M使下式成立:
(24)

式中:c1x,c1v为正常数;L为通信拓扑图所对应的拉普拉斯矩阵;A,B是与控制律(5)参数有关的对角阵。对A,B的详细定义如下
(25)
式中:Λ1,Λ2,Λ3,Λ4分别定义如下
(26)
证.从wi(t)=0和wi(t)≠0两种情况进行分析,首先分析wi(t)≠0的情形如下:
(1)当扰动wi(t)≠0时,分析多系统性能指标,获得满足L2-L∞性能指标的条件。

(27)

(28)
通过以上变换,完成了对原有非线性系统的线性转换,系统转换后如式(29)所示:
(29)
基于正定矩阵M,此时,构造李雅普诺夫函数如下:
V1(t)=λT(t)Mλ(t)
(30)
根据引理4,结合定义(25)、(26),对式(30)李雅普诺夫函数V1(t)进行求导,可得:
(31)
基于式(31),利用L2-L∞性能指标,构造性能指标函数J(w)来分析系统的稳定性。构造的性能指标函数J(w)如下:

(32)
式中:外部扰动w(t)=[w1(t),…,wn(t)]T∈L2[0, ∞)。由于在零初始条件下,存在V1(0)=0成立。因此,式(32)可化为如下形式:
(33)

(34)
(35)


(1-qi(t))<γM,
(1-qi(t))λ(t)<γMλT(t)λ(t),
yT(t)y(t)<γV1(t)
(36)
(37)
因此,对于任意外部扰动w(t)∈L2[0, ∞)≠0,存在:
(38)

综合上述分析,若系统稳定,所设计的控制律(5)能够使依照动力学方程(1)运动的跟随无人机进入领导无人机集群所形成的闭凸包中,并且满足L2-L∞性能指标。
(2)当扰动wi(t)=0时,分析系统性能指标,获得满足L2-L∞性能指标的系统稳定条件。即对于系统模型(1),置wi(t)=0,构造李雅普诺夫函数如下:
(39)
根据定义可知,李雅普诺夫函数V2(t)≥0。
基于模型转化后的系统(7)的位置状态项(12)、速度状态项式(13),可得:ξk(t+Δt)-PY(ξk(t+Δt))是ξk(t)-PY(ξk(t))的凸组合。再结合引理2,有:
PY(ξk(t))||
(40)
基于式(40),可得V2(t+Δt)≤V2(t),即李雅普诺夫函数V2(t)随着时间t的增长是非增的。根据式(39)对李雅普诺夫函数V2(t)的定义,可得V2(t)≥0,因此,V2(t)有界。
另,结合式(12),根据导数的定义,有
(41)
同时,根据式(13)及导数的定义,可得:
(42)
式中:
基于式(40),李雅普诺夫函数V2(t)随着时间t的增长是非增的,即有:
||ξk(t+Δt)-PY(ξk(t+Δt))||≤V2(t)
(43)
基于以上的非增特性,分析系统的收敛性,只需要研究能够接收到跟随无人机if信息的无人机ij在位置状态和速度状态上的变化趋势,即分析推导无人机间的运动趋势。首先分析无人机if自身的位置和速度状态到凸包的距离趋势如下:
在时间t∈[tsd,tsd+1)内,基于该初始条件,根据位置和速度状态因子式(41)和(42),可得:
(44)
βif为在时间t∈[tsd,tsd+1)间隔内所有的βif(t)取值中的最小值,通过微分方程的求解方法,结合比较定理,对式(44)进行求解,得到:
(45)

(46)

-kif||xif(t)-PY(xif(t))||+
(47)

(48)

接下来,需要研究可以从跟随无人机if接收信息的无人机ij的位置和速度状态变化,即无人机之间的运动趋势。当αijif(t)>0,假设αijif(t)有下界αijif>0,那么根据式(42)可得出:
(49)
结合微分方程解的性质,可以得出:
(50)


(51)
同样地,通过(41)结合微分方程的解,可得:

(52)


(53)
根据假设1,在图G中,在每个时间间隔[tsd,tsd+1)内,每个跟随无人机i均能直接或间接接收到领导无人机的信息,那么意味着,在时间间隔[tsd,tsd+1)内,至少有一个无人机能接收到领导无人机的信息,而存在无人机i2能够接收到领导无人机或无人机i1的信息,那么对于φ1,φ2∈(0, 1),有下式成立:
(54)
由于随着时间增长,跟随无人机的位置状态和速度状态变化趋势始终是非增的,因此,在时间序列[ts,ts+1)中,时间t→∞时,式(55)成立:
(55)
即在时间段t∈[tsd,tsd+1)内,当跟随无人机if能够接收到领导无人机il的变化趋势信息时,或者跟随无人机if能够接收到邻居跟随无人机if的变化趋势信息时,所有能收到信息的无人机均会收敛至凸包Y,进而实现包含控制。
综合上述分析,控制律(5)能够使依照动力学方程(1)运动的跟随无人机进入领导无人机集群所形成的闭凸包中,并且满足L2-L∞性能指标,即:
3 仿真校验
为验证理论分析的正确性,由4台固定的领导者无人机和6台跟随无人机,共同组成无人机集群系统,其中领导者无人机群的位置形成一个凸区域。对跟随无人机集群位置与速度进行仿真,加入所设计的控制律(5)和扰动,结果表明,所设计的控制算法能够使符合系统动力学方程的(1)跟随无人机集群全部进入由领导无人机群形成的区域Y内,并且满足L2-L∞鲁棒控制性能指标。
基于上述理论分析结果,仿真设置控制算法(5)中参数如下:
pi=5,αi(t)=0.8,βi(t)=0.5
(56)
且所有跟随无人机的初始位置状态如下:
(57)
初始速度状态如下:
(58)
同时,所有静止领导无人机群的位置状态如下:
(59)
令k=4,即系统进行了4次切换,仿真给出各跟随无人机之间的拓扑图集合G={G1, G2, G3, G4}如下:
同样地,根据通信拓扑图1,取通信拓扑图中所有边的权值为0.8,即αij=0.8,并由此可计算出无人机集群系统中通信拓扑图所对应的拉普拉斯矩阵集L。
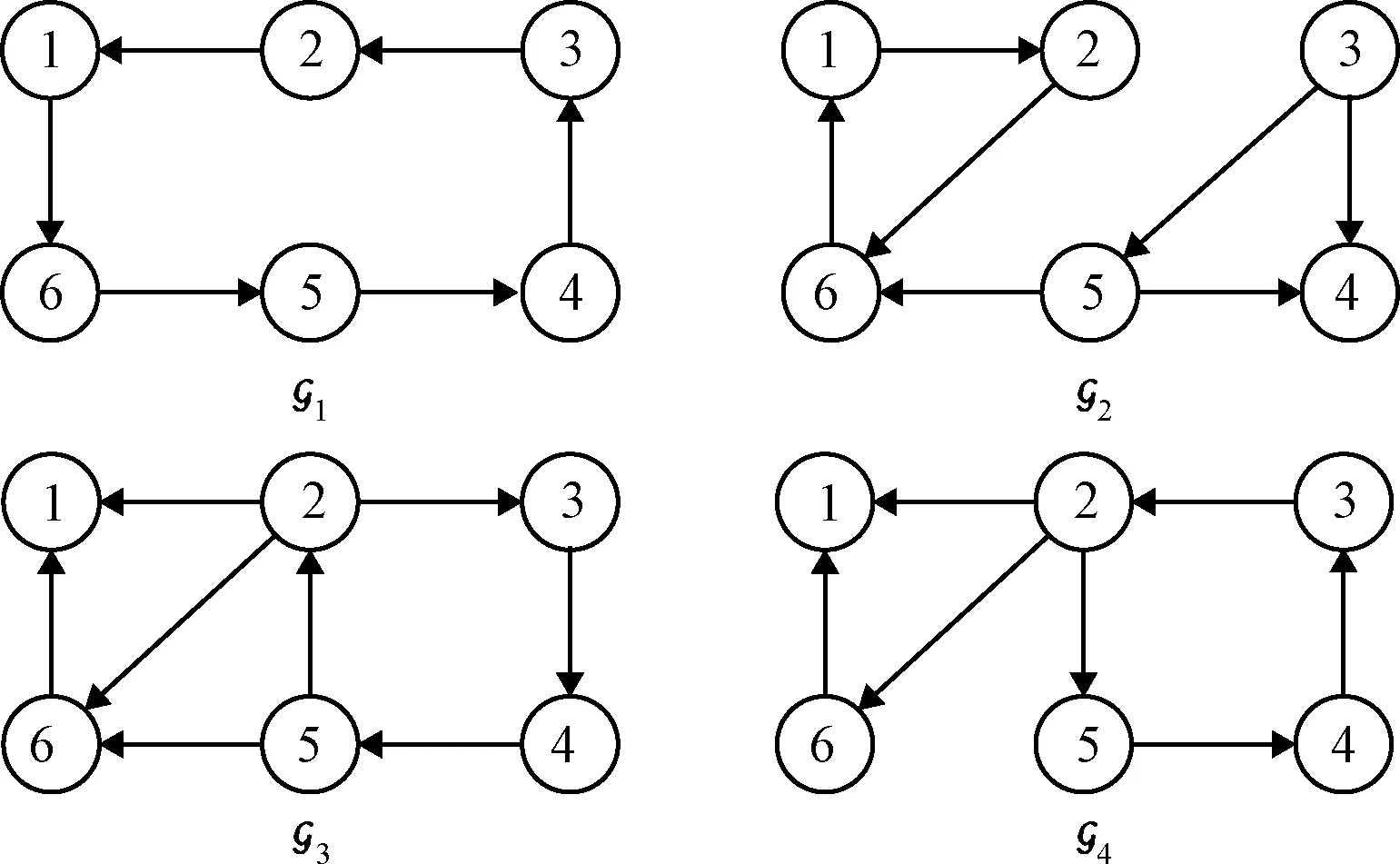
图1 切换通信拓扑系统图Fig.1 Communication topological graph
为了验证证明过程中wi(t)=0的情形,先进行无扰动情况下无人机集群系统的仿真,跟随无人机的位置状态、速度状态和系统输出能量指标仿真结果如图2~4所示。
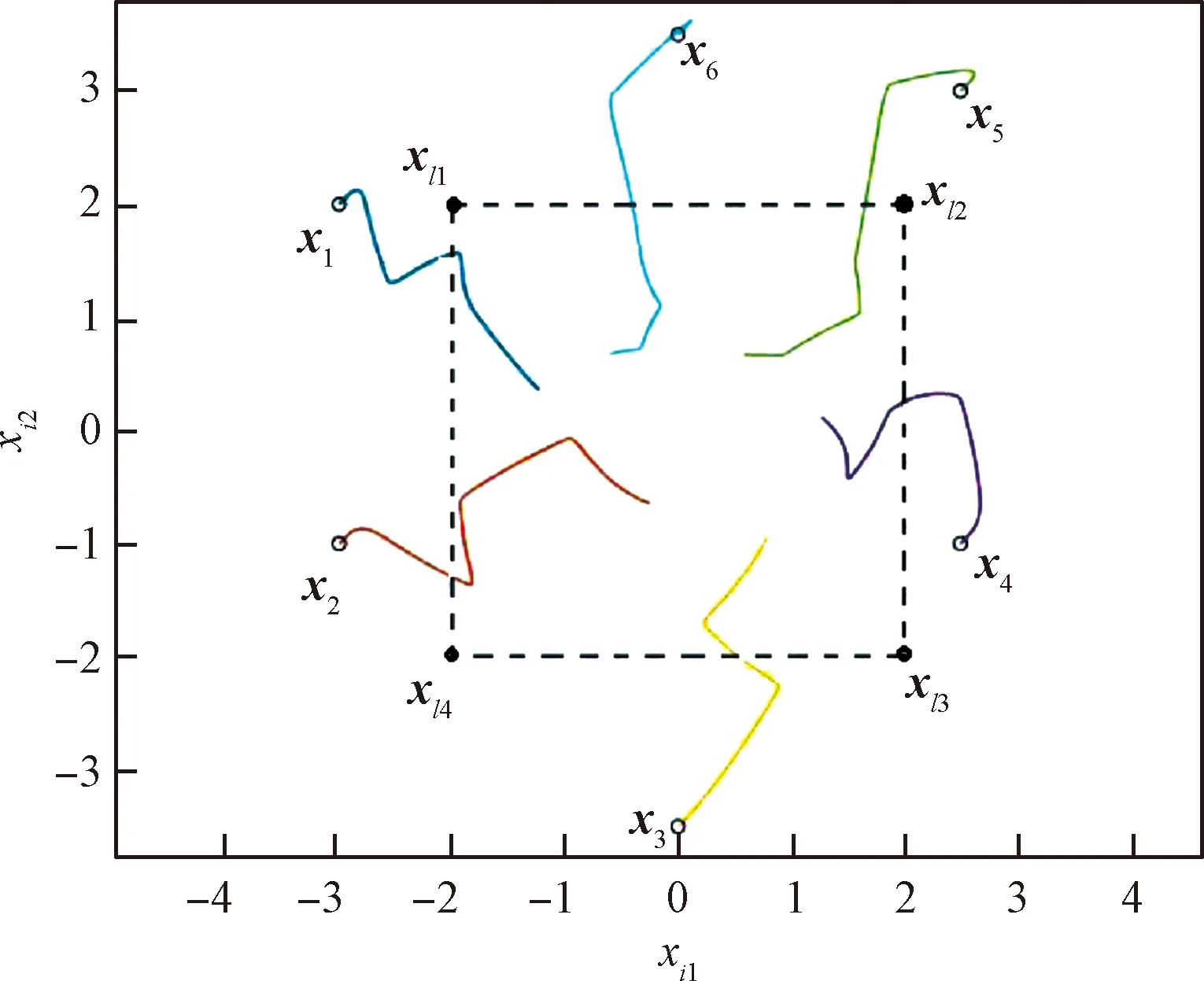
图2 位置状态曲线(无扰动)Fig.2 Curve of position states (without disturbance)
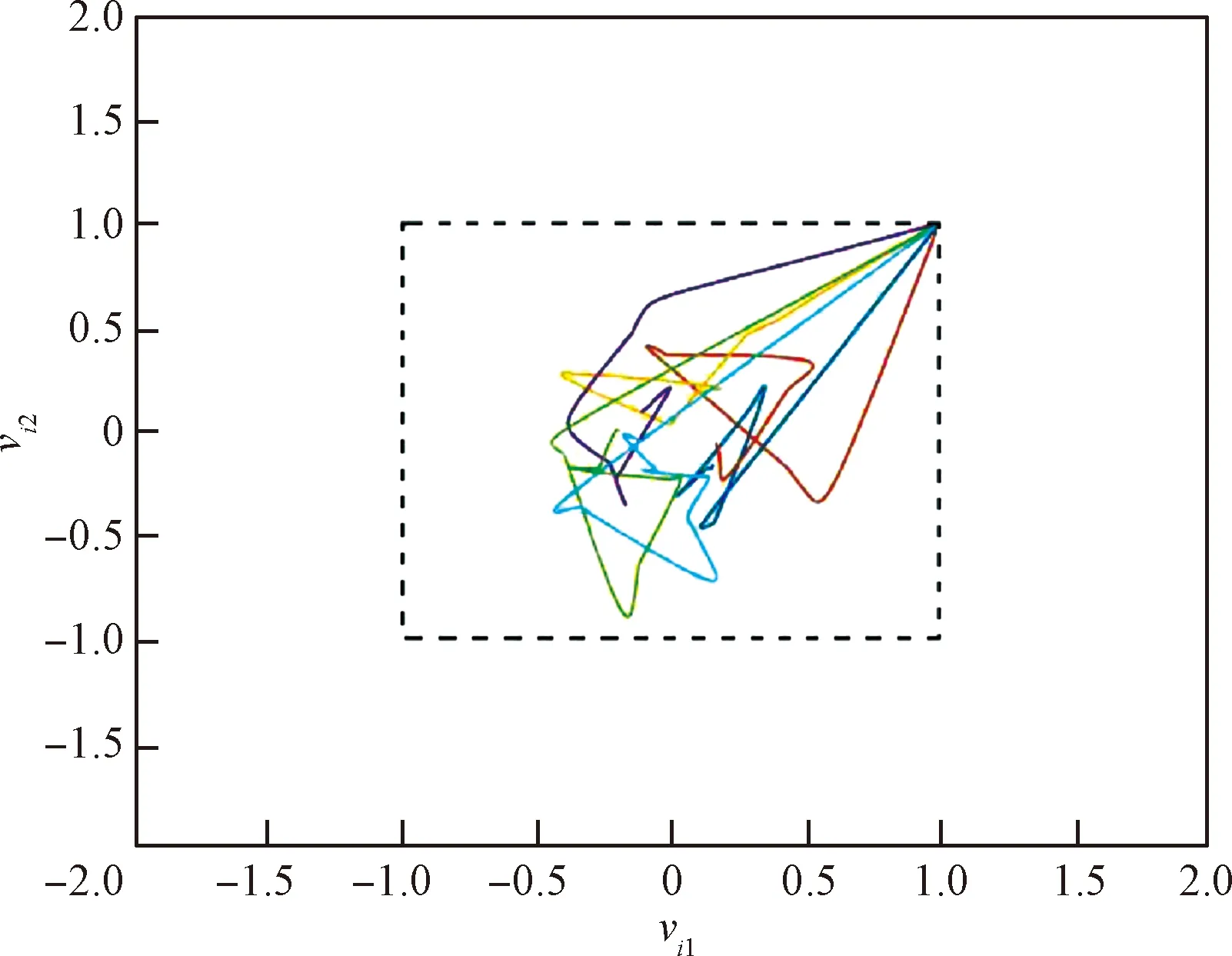
图3 速度状态曲线(无扰动)Fig.3 Curve of velocity states (without disturbance)

图4 投影误差曲线(无扰动)Fig.4 Projection error curve (without disturbance)
为了验证所设计的控制律(5)作用于动力学方程(1)系统的L2-L∞性能指标满足情况,设计外部扰动wi(t)为能量有限、按一定时间间隔出现的脉冲信号,外部扰动wi(t)的具体情况见图5。
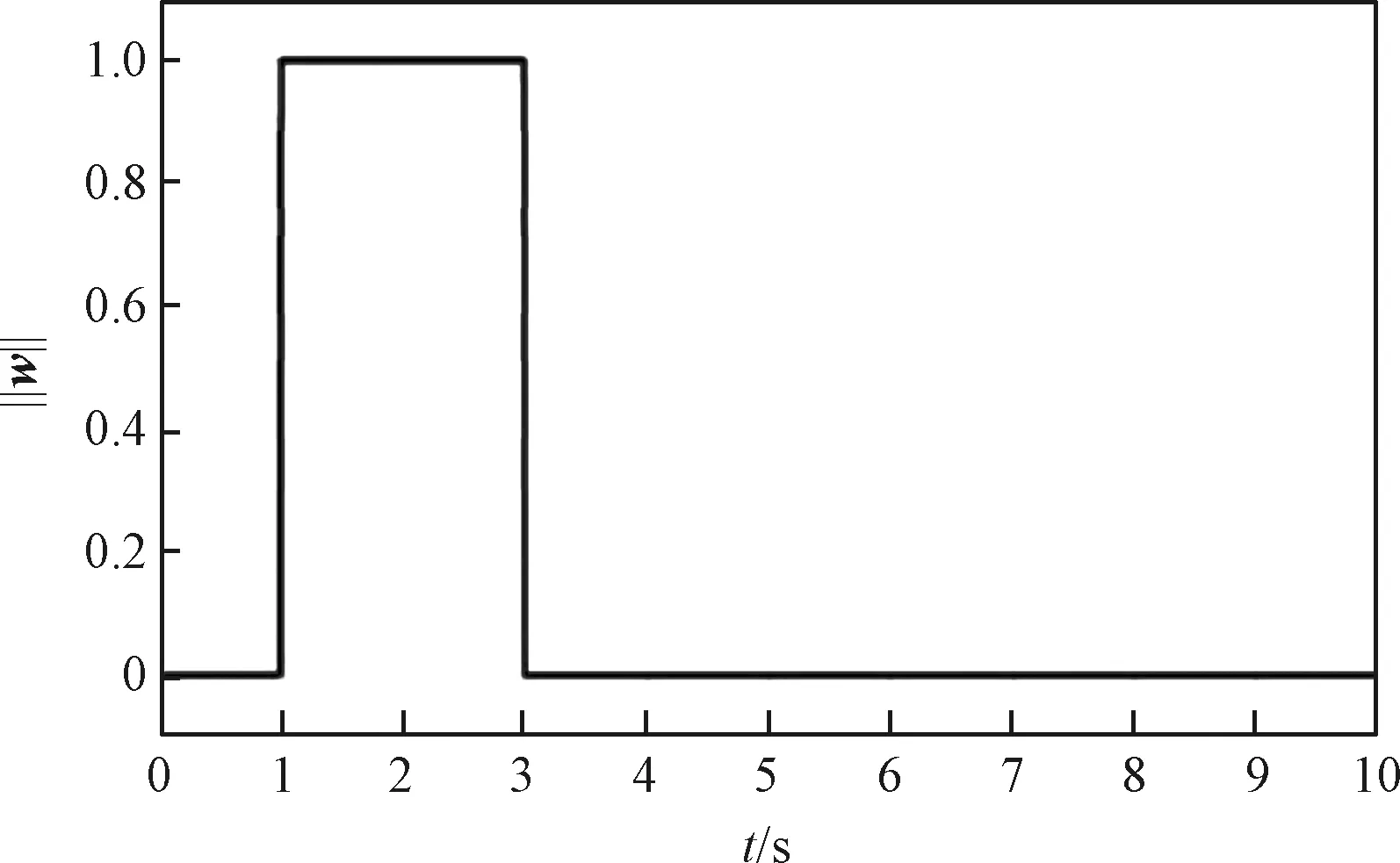
图5 外部扰动(基于变拓扑)Fig.5 External turbulence (switching topology)
当上述所设定的外部扰动wi(t)作用于变换通信拓扑的二阶无人机集群系统时,跟随无人机的位置状态、速度状态和L2-L∞性能指标仿真结果见图6、图7、图8,其反应了所设计的控制律(5)对由6个满足二阶动力学模型(1)的无人机所构成无人机集群系统的控制效果。在图6和图7中,所有跟随无人机在位置状态和速度状态都最终进入领导无人机所形成的凸包,即解决了无人机集群系统的包含控制问题;在图8中,可以观察到代表包围控制效果的投影误差逐渐减小,干扰得到抑制,系统满足L2-L∞性能指标:

图6 位置状态曲线(变拓扑的有扰动情形)Fig.6 Curve of position states (disturbance case of switching topology)
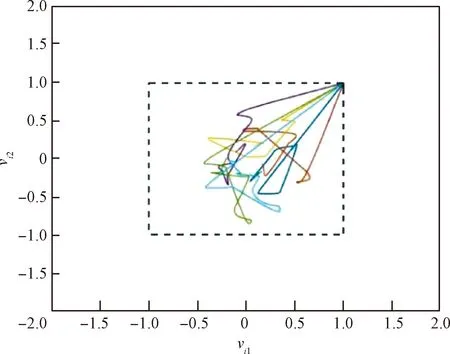
图7 速度状态曲线(变拓扑的有扰动情形)Fig.7 Curve of velocity states (disturbance case of switching topology)
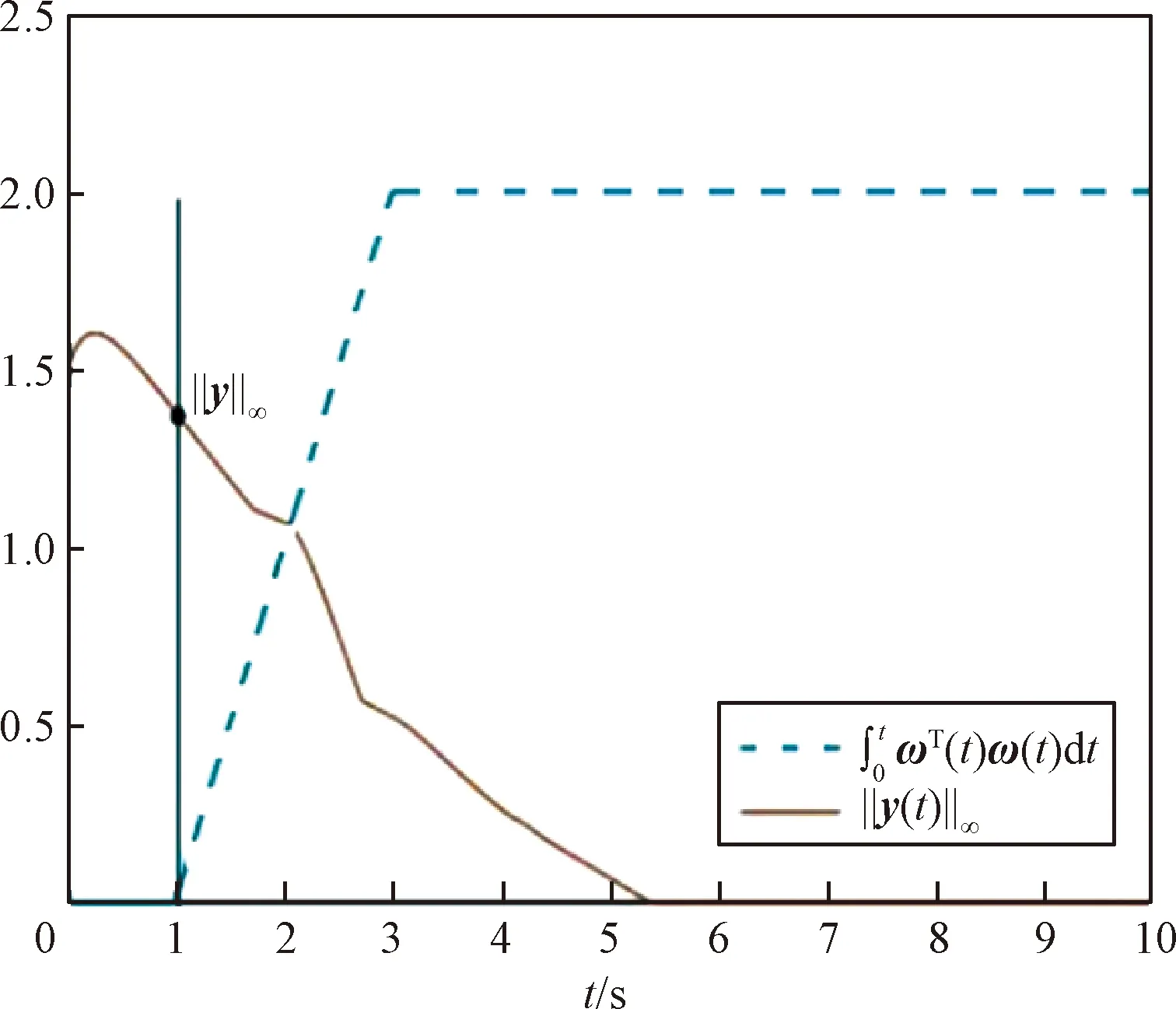
图8 投影误差的变化曲线(变拓扑)Fig.8 Variation curve of the projection error (switching topology)
通过分析图6~8可以得出:所设计的控制律(5)能够使符合动力学模型(1)的所有跟随无人机位置状态和速度状态进入领导无人机集群形成的闭凸包Y内,并且满足L2-L∞性能指标。因此,基于MATLAB/SIMULINK平台的仿真结果与定理1分析推导的结果是一致的。
4 结 论
本文研究了具有通讯变换特点的无人机集群系统的鲁棒控制控制问题,基于系统动力学方程,分析了外部干扰不确定甚至未知的工作环境叠加通信拓扑切换对原系统的影响。理论分析结果和数值仿真的结果均表明,在常见的变换通信拓扑时间序列中,在仅有部分跟随无人机能够得到领导者信息的状态下,其他无人机仅仅需要用到部分邻近的同伴无人机信息,即使是间接获得领导者的信息,也可以通过合适的控制律(5),来调整自身位置状态、速度状态,最终使无人机系统中所有跟随无人机进入领导无人机群的合围凸区域里,且证明了该方法具有L2-L∞鲁棒性,该工作在无人机集群理论研究和实际的集群控制系统中都有重要的应用价值。
猜你喜欢
湖南工业大学学报(2023年4期)2023-06-09
数学物理学报(2022年4期)2022-08-22
佳木斯大学学报(自然科学版)(2022年1期)2022-01-14
石油沥青(2021年1期)2021-04-13
数学物理学报(2019年4期)2019-10-10
自动化学报(2019年8期)2019-09-15
贵州师范学院学报(2016年3期)2016-12-01
制冷技术(2016年4期)2016-08-21
测绘科学与工程(2016年4期)2016-04-17
电源技术(2015年11期)2015-08-22