
电动共享汽车动态调度问题应用综述
2023-09-19 06:13:16田航奇郭家辉
同济大学学报(自然科学版) 2023年9期
王 宁, 田航奇, 郭家辉
(同济大学 汽车学院,上海 201804)
电动共享出行具备加快经济发展、促进技术创新、推动节能减排、提升交通安全、减少道路拥堵的多重叠加作用,有望重构传统以私家车为中心的城市交通体系,成为百姓便捷、高效、经济、安全出行的主要载体。然而,伴随着运营区域、用户规模和车队规模的逐步扩大,自动驾驶、5G车联网、云计算等技术的商业赋能,电动共享汽车运营过程中涉及派单、充电、停车、区域调配等多任务的车队调度模式变得越来越复杂,“企业投入成本”与“用户出行满意”的供需失衡问题持续存在,诸多车队调度运营难题亟待解决。因此,针对电动共享汽车动态调度需求端、供给端和供需匹配端的相关问题,本文旨在系统梳理国内外研究文献,总结已有研究不足,并提出未来研究展望。
1 电动共享汽车概念与发展阶段
1.1 基本概念
电动共享汽车,当前国内又称为电动汽车长短租或分时租,是指人们无需拥有车辆所有权,以共用而非合乘方式与其他人共享使用电动汽车。电动共享汽车企业借助于移动互联技术,以会员制为基础,通过提前预约方式,让不同用户在不同时间使用同一辆电动汽车,自助式地享受自驾用车服务,并按分钟或公里作为结算单位计费。电动共享汽车系统主要包括:①统一标识的电动共享车辆,车内加装有会员卡识别系统(RFID 接收器)、车载终端等;②服务网点,即取还车站点,也是充电和停车的站点,配有统一标识的停车位和充电桩等;③后台管理平台,即处理和计算车、桩、位、订单信息的服务器及管理电脑,如图1所示。图中,SOC表示荷电状态。
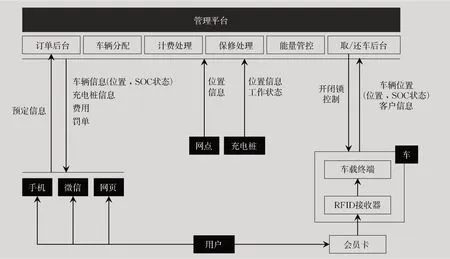
图1 电动汽车共享系统架构Fig. 1 Overall framework of electric shared vehicle system
1.2 发展阶段
1.2.1 电动共享汽车1.0——长短租
电动共享汽车最初为长短租模式,用户提前在网站上预约用车和还车时间及地点,用车时长多在1 d 及以上,按天或月收费。电动共享汽车1.0 模式的特征、优缺点及企业实践如下:
用户端:①用户从哪里取车,就必须在哪里还车;②用户用车通过电话/网络/现场预定;③用户须在预约时明确何时还车,并严格按照时间点还车。企业端:无需对车辆进行调度,只需在营业点维保车辆,进行日常运营工作。优点:企业运营模式简单,运营成本低;缺点:用户使用体验差:①需提前规划取还车时间;②若出行遭遇意外情况会导致无法准时还车。企业实践:如今全球已有超过1 000个城市提供基于长短租模式的汽车共享服务。企业实践案例包括:英国的City Car Club;西班牙毕尔巴鄂、圣塞巴斯蒂安以及维多利亚的Ibilek;德国的Stadtmobil;美国圣弗兰西斯科的CityCarShare;新加坡的NTUC Incarne Car Ca-op,CitySpeed 和WhizzCar;日本的ITS Mobility System(大阪),Tourist Electric Vehicle System(神户),Minato-Miral(横滨);意大利的Car Sharing Initiative计划,基于该计划,意大利国内一些城市各自拥有的汽车共享系统能够实现跨城使用;西班牙、加拿大、英国和美国等运营的Zipcar。
1.2.2 电动共享汽车2.0——分时租
伴随着移动互联技术的发展,电动共享汽车新增分时租模式:用户提前在APP端预约用车时间和地点,并任选还车地点和时间。用车时长一般在1 d以内,按分钟收费。电动共享汽车2.0模式的特征、优缺点及企业实践如下:
用户端:①可预约/可不预约,任意一种方式均可获取车辆的使用权;②仅需完成注册和身份认证等一些简单操作即可;③时间灵活,无须在规定时间节点还车;④用户在A站点取车,可在B站点还车(单向式服务)。企业端:需对车辆进行站点间再平衡调度。调度策略包括三大类:员工调度、用户调度和混合调度。①员工调度策略:通过企业员工调度一辆车或者一队车来缓解站点间的车辆供需失衡问题,同时完成车辆保养、维修、充电等任务;②用户调度策略:通过动态价格或激励手段引导用户完成车辆调度;③混合调度策略:以员工调度策略为主,用户调度策略为辅,两者结合应用。优点:用户使用体验提升:①单向式出行方便用户就近寻找站点取还车;②还车时间无需固定,灵活性更强;缺点:企业新增车辆调度成本。在20世纪末和21世纪初全球一些分时租电动共享汽车示范项目已经展开,当前该模式正在众多国家运营和发展,如加利福尼亚度假区的Coachella Valley system;都柏林普莱森顿海湾地区的Carlink I;加州帕洛阿尔托的Carlink II;新加坡的Honda ICVS;巴黎、法兰西岛和里昂的Autolib;中国的EVCARD与Gofun等。
1.2.3 电动共享汽车3.0——自由租
伴随着移动互联技术的成熟和用户即时出行需求的拉动,电动共享汽车新增自由租模式,车辆不仅仅局限于“待”在站点内等候用户来取,也可以在道路上“守候”。电动共享汽车3.0模式的特征、优缺点及企业实践如下:
用户端:①不但可以在站点取还车,也可以在运营区域范围内的任意一个道路停车位上取还车;②用户可以通过电脑或者手机获得车辆位置和状态的实时信息,以预定他们偏好的车辆;③其他使用模式与汽车共享系统2.0的使用特征相似。企业端:①共享汽车不仅可以停靠在站点内,也可以停靠在运营区域内的道路停车位内;②站点主要是用来进行车辆维修、保养、充电等;③企业需进行车辆调度以实现整个运营区域内车辆分布的合理与高效。优点:用户体验进一步提升:①取还车更方便,尤其是还车位置,就近还车即可;②通过手机应用享受定位车辆位置、挑选车辆等服务更方便快捷。缺点:企业运营管理难度加大:①在运营区域内根据用户需求实现车辆的高效分布难度较大;②运营车队规模需要保持很高的数量来满足用户需求,而车辆使用率较低。如今电动共享汽车系统3.0的主要三家企业实践包括:DriveNow分布在德国,美国圣弗兰西斯科等;Greenwheels遍布荷兰各地;Car2Go起初在德国运营,现已扩散至荷兰、英国、美国、加拿大、中国等。
1.2.4 电动共享汽车4.0——即时租
伴随着L4级自动驾驶技术的快速发展,电动共享汽车将升级为即时租模式:车辆将不仅可以随处“守候”用户的到来,也可以主动进行“车找人”。电动无人共享汽车/eRobotaxi 将成为电动共享按需出行服务的载体。电动共享汽车4.0 模式的特征、优缺点及企业实践如下:
用户端:①用户发布出行需求后,后台调度系统根据用户位置就近分配车辆,一段时间后车辆自主行驶至用户指定候车处接用户上车;②将用户送至目的地(或者用户自主驾驶至目的地),用户下车后,车辆自主前往下一位用户候车处或者前往站点补电或者自主前往需求热区补充车辆供给。企业端:①企业将电动无人共享汽车分布在运营区域内的站点和道路停车位内;②企业的后台调度系统实时快速反应,根据用户需求实时进行敏捷调度;③站点除了用于调度车辆满足用户需求之外,还为车辆提供保养、维护、充电等服务。优点:①用户出行实现无缝衔接,极大提升方便快捷性;②企业通过车辆自适应调度可节省员工调度和用户调度产生的大量成本。缺点:①企业需大批量购置高价电动无人共享汽车,前期投入成本增大;②企业须投入大量研发成本开发电动无人共享汽车调度系统。企业实践:截至2020年,百度Apollo在中国已经累计完成自动驾驶测试700万公里,Waymo在美国已经累计完成自动驾驶测试981万公里。除了以上两大自动驾驶共享出行领头羊之外,美国还有Cruise、Nuro、Zoox等领先企业,中国还有滴滴、AutoX、文远知行、小马智行等领先企业。
2 电动共享汽车动态调度研究综述
2.1 车队动态调度问题
电动共享车队动态调度问题是指在确定的站(充、换电站)、车(电动汽车)、桩(充电桩)、位(停车位)配置方案下,根据具有不同位置、时间、场景式特征的用户出行需求进行车队充电、派单、停车、区域调配多任务的最优匹配,从而即时响应用户日常出行服务需求[1]。
充电,顾名思义,在电动汽车电量低于某个阈值或者无法保证下一轮行程需求的情况下,前往附近的充电桩/换电站进行补电;派单,指将车辆分配给相应的订单(用户),供用户驾车或乘坐;停车,即车辆无其他任务时,前往相应的停车位等候新的任务指令分配;区域调配,指通过预测“需求热区”(供小于需)并提前安排“需求冷区”(供大于需)的部分车辆前往热区进行车辆补给。在不同电动共享汽车发展阶段下,车队动态调度过程中涉及的充电、派单、停车、区域调配多任务的定义略有不同,如表1所示。

表1 不同电动共享汽车模式下的调度任务定义Tab. 1 Definition of relocation tasks in different electric car sharing models
2.2 动态调度影响因素
2.2.1 需求端:用户接受度、偏好与出行需求
需求端的影响因素包括用户接受度、用户偏好与用户日常出行需求[2]。①用户接受度,即选择电动共享汽车作为日常出行方式的用户比率。厘清用户接受度,将能够计算出电动共享汽车的潜在整体市场需求规模;②用户偏好,即用户对选择电动共享汽车出行所存在的特殊诉求。明晰用户偏好,将有助于运营者明确车队动态调度目标,不断优化车队动态调度过程;③用户出行需求,即电动共享汽车用户的出行服务订单需求。剖析用户出行服务需求的时空分布规律并做出预测,将有助于运营者提前针对性调度车辆以及时满足出行订单需求。
2.2.2 供给端:站车桩位配置与车辆实时电耗
供给端的影响因素包括:站点选址和容量设置、车队规模设计、充电桩数量配置、停车位数量配置与车辆实时电耗估计。①合理配置站-车-桩-位对平衡电动共享汽车运营者的投入成本与用户满意度至关重要。站点投入过多或分布不均、车队规模设置过大、桩位配置数目过多均将提升运营成本;相反,站点投入过少、车队规模设置过小、桩位配置数目过少均将降低用户满意度。②与此同时,准确估计电动汽车的实时电耗水平并预测车辆剩余行驶里程,对电动共享汽车充电任务决策起着关键作用。
2.2.3 匹配端:动态调度模型与多任务匹配算法
匹配端的影响因素主要包括:车队动态调度优化模型与派单、补电和停车、区域调配多任务匹配算法。①数学逼真化表征乘客出行需求、道路交通流量、区域供需失衡等不确定因素,有助于模型化现实场景下动态调度的随机决策流程。同时,考虑订单满足率、车队调度成本、车队碳排放等指标建立多目标优化模型有助于提升用户出行体验、企业运营效益与社会减碳效益,促进电动共享汽车系统的高效运行和可持续发展。②决策算法是生成车队派单、补电和停车、区域调配多任务最优匹配方案的关键保障。设计同步降低时、空复杂度的求解算法,有助于实现动态调度过程的实时、快速、高效、最优决策。
2.3 动态调度研究现状
围绕电动共享汽车动态调度问题,学者对包括用户接受度与偏好、共享出行需求预测、车辆实时电耗估计与预测、站车桩位选址布局与规划、动态调度优化模型、动态调度求解算法等在内的子问题开展了大量研究,如图2所示。

图2 电动共享汽车动态调度研究现状Fig. 2 Research framework for dynamic relocation of electric shared vehicles
2.3.1 电动共享汽车用户接受度与偏好
针对电动共享汽车用户接受度与偏好分析,当前主要的研究方法是基于离散选择理论和社会网络理论两大类。
已有研究表明离散选择模型对于解决该类问题十分有效。Catalano等[3]基于意大利巴勒莫城市的通勤出行调查结果,采用多元logit模型分析发现“出行时间和成本”、“停车时间”、“家庭可用车辆数”是影响共享汽车出行需求的三大关键要素。Yoon等[4]基于中国北京的陈述性偏好调查数据得到了相似结论,并发现“充电配置”也是重要影响因素。Balac等[5]通过基于代理的仿真模型发现“停车价格”对共享汽车需求具有显著影响。刘向等[6]采用Nest Logit模型进行回归分析发现:相比“使用成本”、“出行里程”、“驾龄”、“用户拥有私家车情况”以及“年龄”等因素,“站点距离”对用户是否选择电动汽车分时租赁影响度最高。Wagner等[7]采用零膨胀回归模型发现“兴趣点数量(POIs)”对自由租模式的共享汽车服务需求影响显著,Willing等[8]则结合核函数估计、梯度提升树算法和线性回归模型,进一步揭示了不同类别POIs分布密度与出行需求点分布密度的关系。然而,离散选择模型的应用主要关注于电动共享汽车的独有特征和用户个性偏好,忽视了外部社会网络的影响。既有研究表明社会网络环境例如“邻居效应”显著影响用户选择行为,尤其是当新产品或新服务与“绿色”、“环境保护”等概念相关时,社会网络的影响会更明显。Akerlof[9]证明了考虑社会网络影响将能够更贴近现实情况,Forse和Degenne[10]的研究也表明用户选择行为主要取决于个人在社会网络中的位置。因此,通过社会网络分析方法研究电动共享汽车用户接受度和偏好是有必要的。
社会网络应用于选择行为的研究起源于经济和社会科学领域,然后扩展到汽车和交通领域。Dugundji等[11]在出行选择模型中关注社会网络和空间网络的相互依赖性,并假设用户会受相似社会经济地位与相似空间邻近性的影响。Goetzke[12]在美国纽约市展开出行调查,使用空间自回归logit模型分析,结果发现社交网络对于出行偏好有显著作用。Van等[13]指出大多数交通领域的社交网络研究使用以自我为中心的社交网络数据,在自我层面上,与出行相关的变量不如特定的社会决定因素重要,这些因素可以在利用社会网络数据时考虑。Pike[14]明确比较了自我网络和地理邻居产生的社会影响,发现不同的社会影响会对不同的出行方式产生影响。Pike和Lubell[15]研究了加州大学戴维斯分校学生的自我网络,进一步证明即使考虑到社会群体内部共享的环境,社会影响也会影响交通方式的选择。Wilton等[16]利用全网络方法发现,社会接触在远程办公的采用中起着微妙但重要的作用。尽管早期的一些研究已经探讨了个人选择和社会网络的结合效应,但并没有对用户个性特征和偏好进行深入的研究。
2.3.2 电动共享汽车用户出行需求预测
按照时空尺度特征,可以将电动共享汽车用户出行需求预测的相关研究分为两类,即,宏观出行需求预测和微观出行需求预测。前者关注于共享汽车出行服务在国家或城市级别的未来一段时间(数年或数十年)的潜在出行需求总量和整体市场规模的评估,后者则关注于某个站点或子区域在未来短时间(分钟或小时级别)出行订单数量的预测。宏观出行需求预测结果的空间尺度较大且非精确数值,一般难以应用于车辆动态调度优化过程。微观出行需求预测与车辆动态调度问题的时空尺度相一致,其预测结果可直接用于动态调度的优化,如作为站点状态的判断阈值或调度任务的触发依据。本文主要聚焦于电动共享汽车动态调度问题,因而不对宏观出行需求预测的相关进展做展开。
针对用户出行的短期微观需求预测,Barth等[17]提出“车辆数量-出行次数比”、“车辆数量-出行次数站点比”、“站点无车时间”与“站点满车时间”4个共享出行服务需求的影响因素。Dowling和Kent[18]通过实证分析澳大利亚悉尼的交通政策发现,政府的“停车位鼓励优惠政策”是共享汽车得以发展的关键核心要素。Stillwater等[19]采用回归分析发现“道路宽度”、“轨道服务有否”、“单人出行比例”、“仅有一辆车的家庭比例”、“站点平均数量”是解释共享汽车服务单月使用量的关键要素。Schmöller等[20]采用数据拟合方法分析单程式共享汽车系统和自由式共享汽车系统服务需求影响因素,结果表明,“天气情况”并不影响服务需求,而“城市居民年龄结构”有较强的影响作用。Xu和Lim[21]采用遗传算法和反向传播算法构建基于进化神经网络的需求预测模型。结果表明,模型预测准确度优于传统时间序列模型。Ciari等[22]构建基于活动的微观仿真模型预测共享汽车服务需求,但该模型在实际应用场景下的逼真性和预测准确性仍需提升。
2.3.3 电动汽车实时电耗估计与预测
围绕电动汽车的实时电耗估计与预测,现有研究主要分为基于传统车辆纵向动力学模型(模型驱动)和基于新兴机器学习模型(数据驱动)两大类。
国内外学者针对基于车辆纵向动力学方程的能耗模型开展了大量的实验和实证研究。电动汽车与燃油汽车动力来源的不同导致车辆运转、能量消耗和排放不尽相同,但电动汽车是在燃油汽车基础之上发展而来的,两者的主体结构、车辆整体动力学特征基本是一致的。因此,在构建电动汽车能耗消耗模型时,已有的燃油汽车能量消耗计算模型具有一定的参考和指导意义。王震坡等[23]以纯电动汽车长期运行试验为基础,对电动汽车能耗经济性的合理评价方法进行了研究,并对纯电动汽车能耗经济性评价的参数体系及不同车型间能耗经济性比较的参数标准进行了初步探讨。Fiori等[24]利用车辆纵向动力学方程构建了基于瞬时速度、瞬时加速度和道路坡度的瞬时能量消耗模型,结合实车路测数据,同时考虑车辆制动能量回收来估计电池最终的荷电状态。卡内基梅隆大学的Guttenberg等[25]采用基于代理的建模策略开发了一款动力电池状态估计软件INCEPTS,其可以模拟各类交通工具在行驶路线上的动态行为。也有不少学者以单车为基础,采用数据驱动方法从车辆微观运行参数角度研究车辆能量消耗功率。Wu等[26]采集了单辆电动汽车近5个月的运行数据,结合车辆纵向动力学和电机工作特性,构建了基于速度、加速度、道路坡度的能量消耗模型估算车辆瞬时能量消耗,并通过积分形式得到整段旅途能耗总量。Zhang等[27]在综合考虑电动汽车机械动力学特性和电机系统的基础上,从统计学角度建立了基于4种运行工况(加速、减速、怠速和匀速)的电动汽车能耗估算模型。同时,其将电池荷电状态纳入模型当中,并采用实车测量数据以提升预测准确度。Basso等[28]提出了一种概率贝叶斯机器学习方法预测电动汽车实时能耗,结果表明该模型在MAPE指标上优于先前模型。
2.3.4 “站-车-桩-位”选址布局与规划
就“站-车-桩-位”动态合理配置而言,现有研究主要包括充电站点选址、站点容量设计、车队规模设计、充电桩数量配置、停车位数量配置等子问题。以上问题均与用户出行服务需求直接相关,并且站、车、桩、位之间相互紧密联系,因此已有研究大多联合多个子问题进行优化模型的构建,从而在明晰用户出行需求的基础上合理配置站、车、桩、位方案。
Nair和Miller-Hooks[29]围绕站点位置、站点容量、车辆库存和车辆分配4个问题,以企业运营收入最大为上层目标,以用户出行时间和等待时间最短为下层目标,提出基于“企业-用户”的双层规划模型。Li等[30]以系统成本最小为优化目标,考虑出行需求的动态随机性和电动汽车充电限制,提出连续逼近优化模型以解决单程式电动共享汽车系统的站点选址和车队规模设计问题。Lopes等[31]假设出行需求服从泊松分布,构建基于代理的模型模拟里斯本每天的用户出行需求以确定最小车队规模和站点最佳位置。Cepolina等[32]针对即时租电动共享汽车系统,以综合考虑服务水平和运营效率的总成本最小为目标,构建混合整数规划模型进行车队规模优化。Xu等[33]假设订单数量已知,以企业运营利润最大为优化目标,结合集合分割模型构建混合整数规划模型,并采用自定义的分支定价法求解单程式电动共享汽车系统的最小车队规模。Hua等[34]围绕电动共享汽车系统长期基础设施规划(充电站点布局、车队规模及分布等)问题,基于蒙特卡洛仿真生成出行需求构建了多阶段随机非线性规划模型。Ströhle等[35]利用德国50 000条用户出行订单数据,以车队规模最小为优化目标,构建混合整数规划模型以确定双向式共享汽车系统的车队配置。李嫚嫚等[36]以多情景处理共享需求的不确定性,构建以共享车站规模、电动汽车规模、调度员规模等为决策变量的混合整数规划模型,并基于外点法设计求解算法,提供了单向式电动汽车共享系统车队和站点规划的决策支持方法。
2.3.5 电动共享汽车动态调度优化模型
电动共享汽车动态调度优化问题的表现形式主要包括车辆派单任务调度优化问题、充电和停车任务调度优化问题与区域间车辆重定位调度优化问题。已有研究或考虑单一任务或考虑不同的任务组合为电动共享汽车动态调度优化问题提供了针对性解决方案(表2)。

表2 电动共享汽车动态调度相关研究总结Tab.2 Summary of research related to dynamic relocation of electric shared vehicles
就车辆派单任务调度优化问题而言,针对长短租传统共享汽车系统,Nourinejad等[37]建立整数线性规划模型生成选择性车辆分配方案(存在用户需求被拒)使运营利润最大,采用商业求解器Cplex求解。针对分时租电动共享汽车系统,Nair和Miller-Hooks[29]提出基于“企业-用户”一主一从的双层规划模型,并利用KKT(Karush-Kuhn-Tucker)条件将双层规划问题转化为大规模整数规划问题,同样采用Cplex求解。Hua等[34]构建多阶段随机非线性规划模型,并采用结合拉格朗日松弛法和次梯度投影法的加速算法求解车辆分配和充电决策的近似最优解。Carlier等[38]在假设站点布局、容量和车队规模都固定的情况下,基于时间扩展事件图建立数学模型,以最大化满足用户出行需求为目标,构建整数线性规划模型并采用Cplex求解。Cepolin等[32]以综合考虑服务水平和运营效率的总成本最小为优化目标,构建车辆自主调度混合整数规划模型,采用模拟退火算法求解最优车辆调度次数。就车辆充电和停车任务调度优化问题而言,Zhang等[39]采用基于代理的仿真模型BEAM来描述城市中乘客和电动共享汽车系统的复杂行为。Iacobucci等[40]提出一种基于启发式充电策略的模拟仿真方法,构建了带充电约束的混合整数规划模型来优化车辆充电调度过程。Al-Kanj等[41]将电动共享汽车引入网约车系统,并将马尔可夫决策过程与单阶段组合优化方法相结合以实现充电和停车任务分配的实时最优决策。就区域间车辆调配调度优化问题而言,Jorge等[42]引入站点间车辆调度措施,采用蒙特卡洛方法设计需求波动机制,并利用基于代理的仿真模型模拟单程式共享汽车系统的运营过程。Barth等[17]提出三种基于用户出行需求(静态调度、基于需求预测的提前调度和基于需求预约的提前调度)的车辆再平衡调度任务触发机制。Boyacı等[43]针对分时租电动共享汽车系统,综合考虑运营收入和用户收益,设计多目标混合整数规划模型,采用分支定界法求解最优车辆调度方案。为处理用户出行不确定性对调度带来的影响,吴禄彬等[44]引入了需求不确定集合,提出了基于可调决策规则的分时租共享汽车系统空车调度鲁棒优化模型。
2.3.6 电动共享汽车动态调度求解算法
现有求解算法按照最优解特征可分为精确求解算法、近似求解算法两种,根据求解问题的规模分为静态小规模和动态大规模两种,依据算法实现方式分为商业求解器和非商业求解器。针对混合整数线性规划模型,大多研究采用精确求解算法如分支定界法、割平面法,部分学者采用近似求解算法如遗传算法、模拟退火算法、进化算法、元启发式算法等。以上求解算法均已成熟应用于各个领域,学者多采用商业求解器如Cplex、Xpress、Gurobi等求解优化模型。针对非线性规划模型,现有研究部分通过精确求解算法如随机对偶动态规划算法求解,部分利用近似求解算法如外逼近算法、拉格朗日松弛法和次梯度投影法等求解。以上求解算法多基于MATLAB或PYTHON手动编程实现。针对双层规划模型,已有研究利用KKT条件将双层规划问题转化为大规模整数规划问题,采用Cplex商业求解器求解。针对二分图匹配组合优化模型,Kuhn-Munkres算法是当前求解最佳人车匹配调度方案的精确算法[60]。
3 结论与展望
3.1 研究不足
(1)电动共享汽车用户接受与偏好分析尚未考虑社交网络影响。当前围绕电动共享汽车用户接受度与偏好的研究主要基于离散选择模型,该模型主要关注电动共享汽车的独有特征和用户个性偏好,忽视了用户外部社交网络的影响。既有研究表明:社交网络环境例如“邻居效应”将影响用户选择行为,尤其是当新产品或新服务与“绿色”、“环境保护”等概念相关时,社交网络的影响会更明显。因此,有必要进一步通过社会网络分析方法研究电动共享汽车用户接受度与偏好。
(2)用户出行服务需求预测模型的准确性和可解释性有待提升。针对短期范围内电动共享汽车用户出行服务需求的预测方法主要分为仿真模拟、数据拟合和机器学习三大类。仿真模拟方法可以有效模拟共享汽车用户出行行为,但其预测准确性和稳定性有待验证和提升。数据拟合方法例如最小二乘法、递归最小二乘法、卡尔曼滤波、Holt模型等被证明容易欠拟合或过拟合。以反向传播神经网络、图卷积神经网络为代表的机器学习模型效果最佳,但这些模型仍存在输入特征与预测结果之间因果关系难以解释的弊端。
(3)模型驱动或数据驱动的电动汽车电耗实时估计与预测受阻。模型驱动的传统车辆纵向动力学方程通常可以直接分析道路情况、环境因素、车辆运行状态等对车辆电量消耗的影响,并且可以对输入、输出给出有效合理的解释。然而,诸多数据如风力、空气湿度、坡度、道路粗糙度等难以准确、快捷获取。数据驱动的机器学习模型可省去众多因素(如环境、道路等)的影响,仅需考虑车辆瞬时速度、瞬时加速度、平均速度、平均单程油耗等特征即可较为准确地实现车辆实时电耗的估计和预测,但该方法对数据规模和数据质量有较高要求,且模型可解释性较差。
(4)“站-车-桩-位”选址布局与规划方法缺乏动态优化能力。针对“站-车-桩-位”动态合理配置问题,已有研究主要通过M/M/1/K排队论模型、闭合排队网络等方法建模,采用优化、聚类、模糊逻辑算法和仿真方法,在明晰用户出行需求基础上合理配置站、车、桩、位方案。然而,当前研究均忽略“站-车-桩-位”配置方案的自我迭代优化机制,存在无法针对用户出行服务需求和车队运营优化目标的变化而动态调整的缺陷。
(5)车队动态调度过程的多目标非线性随机优化机制尚未厘清。就动态调度优化数学模型而言,当前的优化目标大多仅考虑企业运营收益或用户服务水平单个目标,即使综合考虑两者,也仅是通过线性加权法进行目标统一,尚未考虑多项优化目标之间的非线性关联机制。同时,在优化模型构建过程中,大多研究均通过简化假设忽略了诸多随机因素,例如用户出行需求、车辆荷电状态、车辆行驶路程/时间、道路实时路况等,导致模型逼真性较差。
(6)车队大规模动态实时调度求解算法的时空复杂度有待降低。已有求解算法的设计大多针对静态小规模问题展开案例研究,忽视了现实场景下车队大规模调度的求解效率,导致算法实用性不强。为提升动态大规模场景下的求解效率,Hua等[34]等先采取线性松弛法缩小模型运算规模,再利用智能算法近似加速求解。Boyacı等[43]先通过集计模型减少模型运算规模,再采用分支定界法精确求解。然而,以上思路仍存在难以即时(2~5 s)响应用户出行需求的瓶颈,求解算法的计算效率仍需进一步提升。
3.2 研究展望
电动共享汽车动态调度是一个复杂的供需匹配问题,涉及到需求预测、车队配置、路径规划、能耗估计、布局选址、订单分配、充电规划、停车规划、区域调配等子问题,覆盖统计学、计量经济学、运筹学、机器学习、车辆系统动力学等多学科。本文基于对电动共享汽车服务需求端、供应端、匹配端的现有文献总结,认为如下研究方向仍需深入:(1)需求端:第一,电动共享汽车的用户接受度分析方法应新增考虑社交网络效应的影响;第二,电动共享汽车出行订单需求预测模型的准确度和因果可解释性仍有提升空间。(2)供应端:第一,针对电动共享汽车“站-车-桩-位”选址布局问题,仍需寻找可针对用户出行服务需求和车队运营优化目标的变化而动态调整的优化方法;第二,电动共享汽车实时电耗估计与预测模型的准确性与可解释性仍需提升,车辆纵向动力学模型与机器学习模型相结合的方法有望解决这一难题,但两者的有机结合机制有待探索和验证。(3)匹配端:第一,在构建电动共享汽车动态调度优化模型前,需进一步厘清车队动态调度过程的多目标非线性随机优化机制;第二,针对现实应用场景下电动共享车队大规模调度求解效率低的问题,仍需设计时空复杂度更低、实用性更强的算法。
作者贡献声明:
王宁:负责研究思路,关键素材整理及论文审阅。
田航奇:论文的撰写、修改与校对。
郭家辉:提供研究思路,撰写论文。
猜你喜欢
汽车工程师(2021年12期)2022-01-18 06:02:43
小读者(2021年2期)2021-03-29 05:03:20
电子制作(2019年14期)2019-08-20 05:43:42
国际呼吸杂志(2019年1期)2019-01-28 09:37:02
汽车观察(2018年10期)2018-11-06 07:05:28
中国自行车(2018年6期)2018-07-23 03:16:52
车迷(2017年10期)2018-01-18 02:10:46
北京汽车(2017年3期)2017-10-14 02:15:52
中国自行车(2017年1期)2017-04-16 02:53:52
故事会(2016年21期)2016-11-10 21:15:15
