
自走式山地电动多功能作业机设计研究
2023-09-19 08:34杨锐琴李昱廷
农业技术与装备 2023年7期
杨锐琴,李昱廷
(太原市农业技术推广服务中心,山西 太原 030000)
山西省共有115个农业县(市、区),其中丘陵山区县(市、区)有71 个。2016 年底,全省丘陵山区农作物耕种收综合机械化水平为56.8%,而全省主要农作物综合机械化水平为66.6%,全省丘陵山区机械化水平还较低。主要原因是丘陵山区耕地之间分割严重,巴掌田、鸡窝田、窄条地块等小山坡梯田多,大型农机具难以作业。因此,设计一种自走式山地多功能作业机,具有结构轻便紧凑、操作简便、无尾气噪音污染和维护成本低等特点,可解决丘陵山区劳动力短缺和机械化水平低的问题。
1 整机结构设计
自走式山地电动多功能作业机由动力主体部分及辅助作业部件两大部分组成,其中主体部分为动力部件,包含有通用机架、电池组、电机、变速箱、驱动轮、操作装置、电控装置等(图1),传动部分全部为齿轮传动,而且为全封闭形式,传动平稳、可靠,噪音小,故障率低,而且在尘土较多的专业环境中可以可靠工作,使用寿命长。
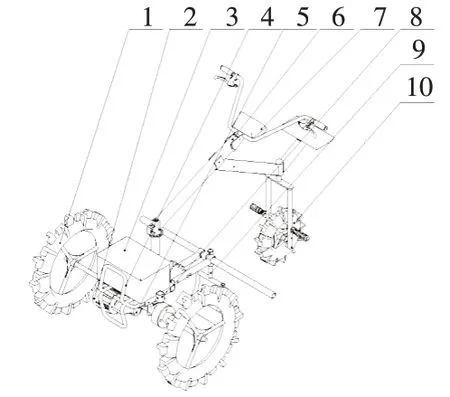
图1 整机结构图Fig.1 Structure chart of the complete machine
工作中,操作者跟随机具行走,手扶机具并操控进退、停止、方向和速度等功能,整机在电力作用下,电动机将动力通过传动系统传递动力至驱动轮,驱动轮运转与接触地面产生摩擦力而向前行驶,牵引辅助作业机具完成农田工作。如果在田间行走,则尾轮与通用机架连接,与前面的两个驱动轮呈三角形布置,支撑整个机具质量,与连接座铰接的辅助作业部件则为提升状态,有一定离地间隙,在操作者的操作下可在路面行驶;如果在田间作业,则尾轮与通用机架分离,与连接座铰接的辅助作业部件呈作业状态,在操作者的操作下可进行田间作业,整机主要参数见表1。
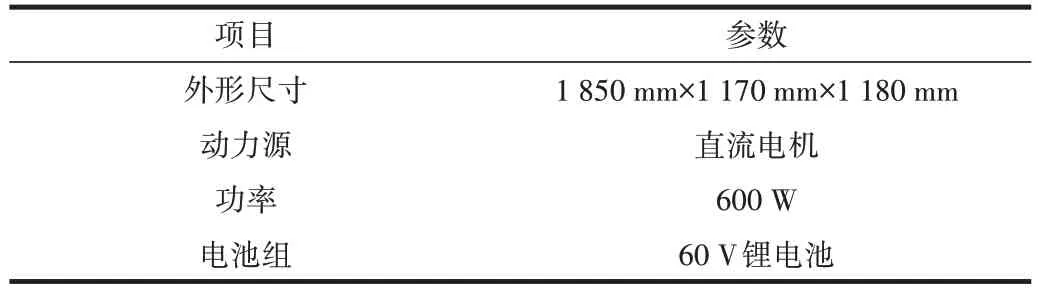
表1 主要参数Tab.1 Main parameter
2 关键技术及部件研究
2.1 配套功率的确定及电机选型
工作中,除需要克服自身的行走阻力外,还需要克服耕作阻力。本研究机具的耕作阻力主要用于播种作业的耕作阻力,计算引用犁耕阻力计算公式,则耕作阻力为:
式中:Z——开沟器个数;b——单个开沟器宽度,cm;h——播种深度,cm;k——土壤耕作比阻,kgf/cm2。
本研究中配套播种机的开沟器数量为2 个,开沟器宽度为6 cm,播种深度为3~8 cm(计算时以最大播种深度8 cm 计算),土壤比阻取0.4 kgf/cm2。
将参数代入上述公式中,计算得出耕作阻力F阻约384 N。
人的正常行走速度约4~5 km/h,但是在田间行走,由于地表较松软,而且需要有一定的负重,田间平均行走速度约2.5~3.5 km/h,本研究机具在田间工作中需要操作者在后面跟随,因此作业速度取值3.5 km/h,约0.97 m/s。
播种机工作所需功率,应由播种机的工作阻力和行走速度来求定,即播种机的驱动功率可由公式(2)给出:
式中:F——耕作阻力,384 N;v——作业速度,0.97 m/s。
将数值带入上述公式,计算得到牵引功率为372.5 W。
为保持机具在较高牵引效率范围内使用,延长行走机构及其他部件寿命,防止工作中地表状况较差,秸秆量大、杂草多或者遇到石块等状况,此外在山区道路行驶,有的地块坡度较大,土壤中行驶,滚动阻力也较大,通常需要保留一定的功率储备,本研究取30%,则电机的功率为:
式中:N0——电机功率,W;η——牵引效率,本研究取80%;P——牵引功率,W。
将数值代入上式得N0=532.1 W
目前电动车电机主要有有刷电机和无刷电机两种类型,有刷电机技术成熟,配件易购,配套的有刷速度控制器便宜,但是电刷严重磨损后,需要打开电机盖更换。无刷电机没有开盖更换电刷的问题,比有刷电机省电,有力,寿命长,而且随着近几年关于无刷电机技术研究的深入,无刷控制器的价格大幅度下降,质量提高,因此,无刷电机逐步取代有刷电机主导地位。经综合考虑,本研究机具根据市场现有电机参数选用了性价比较高的无刷直流中置电机,电机功率为650 W,使用60 V 的电压,电路中电流较小,无需配置大电流专用电线,降低了电路成本。
2.2 机架设计
本研究要求机架可以满足连接这些不同作业部件的通用接口,此外还需考虑到预留一些连接孔,方便后续工作需求。为保证结构的稳定性,机架主体结构为框架结构,并辅助板材、型材等其他零部件,最后经焊接形成一体结构,提高其强度,保证后期使用的可靠性、安全性。
机架整体结构见图2。机架纵梁与机架横梁构成矩形框架结构,机架纵梁外侧与套管固定连接,机架纵梁下侧与变速箱连接板固定连接,机架横梁后侧与立柱固定连接,固定轴穿过角度调节座与立柱上端固定连接,通用连接座与立柱后下方固定连接。为了减轻整机质量,满足整机性能的情况下,机架纵梁、立柱、机架横梁均采用40mm规格的方管。
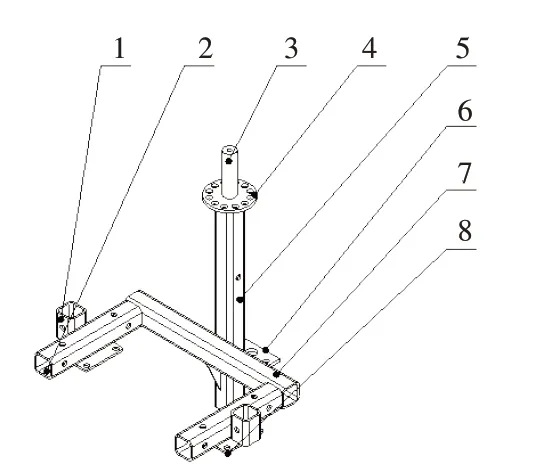
图2 机架结构图Fig.2 Frame structure drawing
2.3 驱动部分设计
本设计驱动部分采用车辆上面使用较多的整体式丁字型结构驱动桥,见图3,齿轮传动,且传动部件均在密闭空间内,齿轮接触面有润滑油或者润滑脂润滑,噪音低,传动平稳且在粉尘较多的环境中也可以可靠作业。主要由电机、主减速器、差速器、半轴及连接座等部分组成,低速电机+高低档驱动桥组装成整套驱动桥,速度慢扭力大,适合载重大的场合使用。主减速器采用单级减速器,主减速器齿轮采用斜齿轮,差速器采用普通圆锥行星齿轮差速器,设置有半轴,桥壳采用铝合金整体式桥壳。电机与驱动桥直连,不用链传动,直接通过齿轮传动经减速机构传到驱动轮上,减少了功率在传动过程中的能量损失,简化了工艺流程和加工难度。整个驱动部分具有体积小、结构紧凑、适应能力强、传动效率高、故障率低等优点。使用后,可以使整机质量减轻,方便布置其他部件、车辆控制操作简单、成本大幅下除,它与机架之间的连接仅用U型卡就可以快速连接,降低了制造的成本。
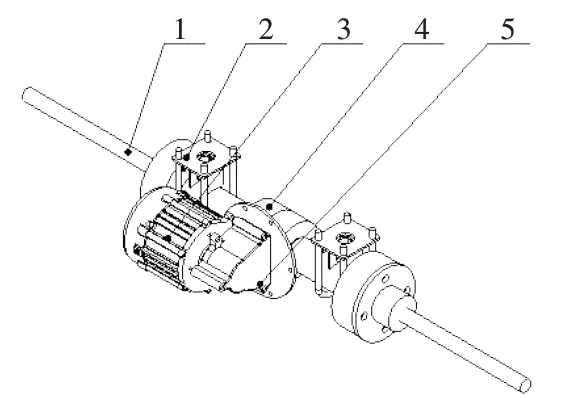
图3 驱动结构图Fig.3 Drive structure diagram
2.4 轮胎选型及轮距确定
考虑到机具适用范围,本研究选用了2 种不同类型的轮胎,一是500-10 人字花纹轮胎,轮辐直径480 mm,轮辐宽度110 mm,最大负荷258 kg,层级6P,此轮胎胎面较宽,不易粘土,轮径较小,行驶稳定性较好,适合田间行驶及播种等作业场合使用;另一种为鸭掌式实心窄边轮胎,直径650 mm,宽85 mm,花纹深40 mm,附着能力强,此轮胎轮径较大,机具离地高度较高,可用于中耕喷药等场合使用。
机具主要用于山区及大棚,转弯半径宜小,如果作物后期植株生长较高,机具无法横跨作物外行走,只能将轮距缩小,适应在如玉米等作物行间行走,进行除草等作业,避免损伤作物。根据作物种植农艺标准,在不影响整机稳定性的前提及综合考虑整机结构,并保证作业安全,最确定轮胎内侧最窄可调节至40 cm,可适应种植面积较多的玉米、马铃薯等作物行间中耕除草作业;最宽轮胎内侧可调至120 cm,以玉米常见种植行距60 cm为例,在喷药时,为了使喷头喷洒面积大,则离地高度需要高,考虑到整机稳定性问题,将轮胎横跨两行玉米外进行行驶作业,这样就达到了较好的稳定性。
2.5 提升装置设计
根据作业需求会配置不同类型的作业部件,后置机具在作业过程中或者道路行驶过程中需要升降,离开地面,否则影响机具行驶,因此设计了一种手动提升装置,可有效降低操作人员的劳动强度,只需一个操作手柄,可快速控制后置机具升降。提升装置主要由缺口板、止动销、复位弹簧、拉线固定板、通用连接架及钢丝拉线等部件组成,见图4。
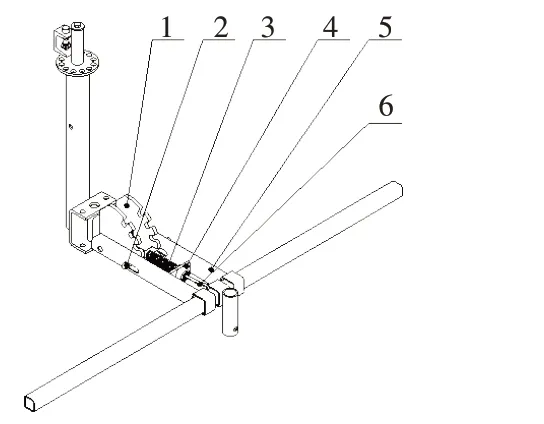
图4 提升结构图Fig.4 Diagram of lifting structure
缺口板上面以一定间隔角度均匀设置有若干个缺口,可使得后置农机具位于一定角度范围内的某一位置。如需调整后置农机具与地面的夹角位置,则通过操作手柄控制拉线,通过拉线将止动销从缺口板上设置的缺口中向后拉出,此时调整通用连接架的位置,当调整到合适位置后,将止动板设置的缺口与止动销对齐,松开拉线操作手柄,在复位弹簧作用下,止动销进入所对准的缺口,完成锁定。经综合考虑,确定提升的角度范围为60°,止动销直径规格为Φ12 mm。
2.6 辅助尾轮及可调扶手设计
机具根据不同作业需求,后面需要配置不同质量的作业机具,在田间道路运输过程中由于运输距离较长,如果只靠2个行走轮支撑,通过操作者扶持扶手将后置机具以支撑轮为支点抬离地面,由于后置机具质量不同,整个机具重心无法集中至支撑轮支点铅垂线附近,在崎岖不平的田间道路行走,操作者难以保持平衡,操作者会感觉疲劳,行走速度受影响,严重影响使用。本研究设计了一种快速拆装的尾轮机构,见图5。由尾轮架、座椅、尾轮、脚蹬等部件组成,尾轮架端部设置有U 型连接座,通过一根连接销即可将整个尾轮机构与主体机具连接,尾轮架后端设置有可前后调整位置的座椅,方便操作者乘坐驾驶行走,尾轮叉架两侧设置有可折叠脚蹬,方便操作者搁置双脚,尾轮为万向轮结构。通过上述结构的增置,极大地改善了机具的舒适性、适用性。
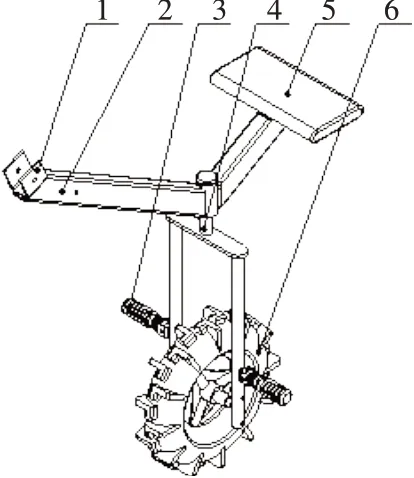
图5 尾轮结构图Fig.5 Diagram of tail wheel
为了适应不同身高的操作者操作,设计了可调整扶手,见图6。扶手由扶手水平角度调整座、锁定销、一级扶手架、扶手竖直角度调整座、二级扶手架及立柱等部件构成。二级扶手架与扶手竖直角度调整座刚性连接,扶手竖直角度调整座上面设置有若干个销孔,根据需求,扶手竖直角度调整座上面的不同销孔与一级扶手架上面设置的销孔相对应可组合成不同的高度的扶手位置,可在25 cm 范围内调整;同理,在立柱上面也设置了一个360°范围内均匀布置的若干个销孔,可与水平角度调整座上面的销孔相对应组合成不同水平转角位置的扶手位置,在360°范围内调整,方便操作者使用。

图6 扶手结构图Fig.6 Diagram of handrail
3 结论
本文研制了一种在大棚和沟梁山坡等地方兼用的自走式山地电动多功能作业机,可分别进行播种、喷药、除草等多种作业。整机实现了小型电动力机代替传统的牲畜耕牛耕或燃油机在山坡洼地、菜园子及大棚等地块作业,其结构简单、便于推广应用,而且无废气排放,利用家用照明电路即可充电,省时、省力、省钱,样机经多次试验改进后,各方面性能均达到了设计要求。
猜你喜欢
蜜蜂杂志(2021年10期)2021-12-06
蜜蜂杂志(2021年11期)2021-02-18
家庭影院技术(2019年12期)2020-01-19
铁道通信信号(2018年11期)2019-01-19
无线互联科技(2018年20期)2018-12-27
温州医科大学学报(2016年9期)2016-10-31
新农业(2016年14期)2016-08-16
工业设计(2016年4期)2016-05-04
哈尔滨医药(2015年4期)2015-12-01
上海金属(2013年6期)2013-12-20
