
基于深度学习的无人机多目标自动跟踪系统
2023-09-19 13:34:34薛行贵宋德鹏
电子设计工程 2023年18期
薛行贵,宋德鹏,陈 思
(1.武警上海总队,上海 200050;2.武警警官学院,四川 成都 610213;3.武警研究院,北京 100012)
深度学习是在人工智能基础上发展起来的新兴研究方向,可以根据机器学习算法,对云数据进行处理,且不对数据信息所属类型进行严格要求。一般来说,深度学习技术的应用在于表现样本数据的内在规律及所属层次,可以在加工信息参量的同时,分析目标节点之间的数据传输关系[1-2]。作为模式分析方法的统称,深度学习技术的应用主要涉及神经网络搭建、神经元编码、数据样本预训练三方面内容。其中,神经网络体系决定了数据信息参量在网络环境中的传输能力,神经元编码条件则负责建立样本数据之间的数值映射关系,而数据样本预训练则可以鉴别所选择数据信息参量是否满足神经网络主机的调取与处理需求。
无人机是以无线电遥控设备和自备程序为必要控制条件的不载人飞行器设备,在复杂运动环境中,地面主机及基站也可以对无人机飞行器进行间歇式控制[3]。受到航线轨迹、自然天气等外界因素的干扰,无人机飞行器对于待测目标的控制能力可能会受到影响,此时极易使所采集到的目标图片像素远低于预设像素指标的数值水平。
为应对上述问题,基于地空信息融合的无人机控制系统注重对目标图片中的噪点参量进行提取,根据噪点信息与常规像素之间的覆盖关系,制定飞行器主机所遵循的跟踪执行指令[4]。然而此系统的应用能力有限,并不能保证目标像素数值与预设像素指标之间的贴合关系。为避免上述情况的发生,以深度学习算法为基础,设计一种新型的无人机多目标自动跟踪系统。
1 系统硬件设计
无人机多目标自动跟踪系统的硬件执行单元由无人机操纵平台、核心管控电路、目标节点处理模块三部分共同组成,以下将针对上述三个硬件应用结构的设计方法展开研究。
1.1 无人机操纵平台
无人机操纵平台由DJI M100 设备主机、执行结构两部分共同组成。其中,DJI M100设备主机负责记录无人机飞行器运动轨迹的分布形式,可以根据待测目标节点的排列状态,制定后续的跟踪执行指令;执行结构则包含GPS 元件、IT2 操作元件、FLC 元件等多个组成部分,能够在确定无人机飞行器与待测目标对象之间对应关系的同时,按照深度学习算法的约束条件调节已获取数据信息参量的存储形式,从而缓解DJI M100 设备主机所面临的指令运行压力[5-6]。具体的无人机操纵平台作用模式如图1所示。

图1 无人机操纵平台的作用模式
随着无人机待测目标对象数量的增多,DJI M100 设备主机所承担的数据存储压力也在不断增大,但由于深度学习算法约束条件的存在,GPS 元件、IT2 操作元件、FLC 元件对于无人机飞行器的控制能力能够始终保持稳定,这也是系统主机最终所运行跟踪指令不会脱离待测目标对象而独立存在的主要原因。
1.2 核心管控电路
核心管控电路(如图2 所示)可以为无人机多目标自动跟踪系统提供动力支持,能够根据电阻之间的数值配比关系,协调下级电感之间的连接关系,从而使无人机飞行器保持相对稳定的运行状态[7]。
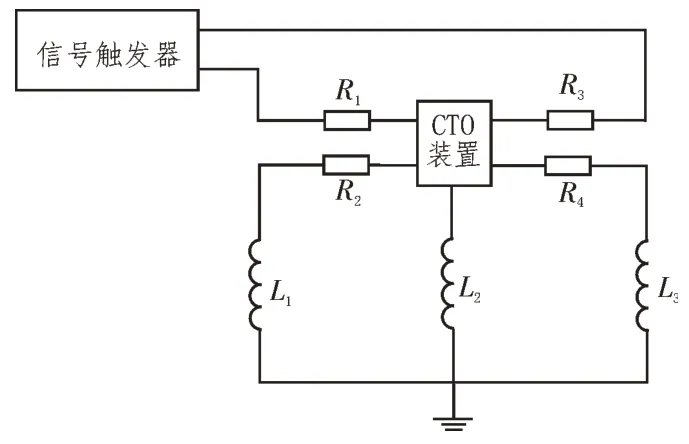
图2 核心管控电路结构简图
信号触发器元件同时管控电阻R1、R2、R3、R4。其中,电阻R1与R3的阻值水平相对较高,负责调节无人机飞行器的实时运动速率[8];电阻R2、R4接受CT0 装置的直接控制,负责协调电感L1、L2、L3两端的负载电压,可以调节待测目标与无人机飞行器的间隔距离,从而使得系统运行主机能够制定更加符合实际应用需求的跟踪指令执行程序。
1.3 目标节点处理模块
在无人机多目标自动跟踪系统中,目标节点处理模块负责制定待执行程序指令,能够利用数据信息文件与应用设备之间的反馈关系,将待执行程序指令传输给既定处理主机。目标节点处理模块的应用设备元件包括图像提取主机、数据信息处理主机与飞行器控制主机[9-10]。其中,图像提取主机负责跟踪无人机目标对象,数据信息处理主机负责制定多目标跟踪指令,无人飞行器控制主机负责管控无人机飞行器的实际行进方向。完整的目标节点处理模块连接结构如图3 所示。

图3 目标节点处理模块结构示意图
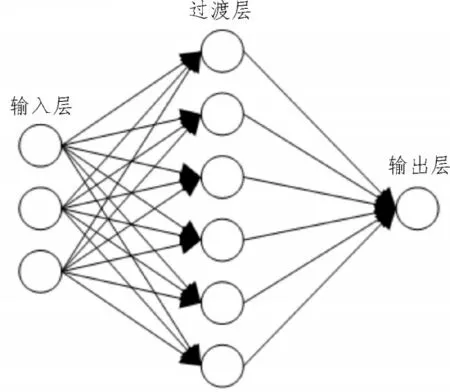
图4 深度学习网络的框架结构
对于无人机多目标自动跟踪系统而言,目标节点处理模块的连接行为受到核心管控电路的直接调节。
2 目标跟踪方法
在各级硬件应用结构的支持下,搭建深度学习网络,并根据目标节点特征提取表达式,求解无人机多目标对象的方向跟踪向量,将二者结合,完成基于深度学习的无人机多目标自动跟踪系统的设计。
2.1 深度学习网络
深度学习网络能够将飞行器设备所接收到的数据信息参量反馈给系统处理主机,并可以在过渡层节点的作用下,更改已录入信息的传输格式,从而使得系统主机所制定的跟踪执行指令能够完全符合实际应用需求[11-12]。在实际应用过程中,输入层节点对应负载于无人机飞行器之上的数据信息录入元件,由于目标对象的运动形式具有多样化的特点,所以输入层节点必须具有极强的数据信息存储能力;过渡层节点负责将所采集到的无人机目标对象信息传输至输出层节点;输出层节点对应系统处理主机,负责将多目标跟踪指令反馈给其他硬件应用设备。
为使深度学习网络的应用能力得到保障,过渡层节点个数会随着数据信息参量的累积而不断增大。
2.2 目标节点特征
目标节点特征即为无人机待测目标对象的跟踪处理特征,在深度学习网络框架的作用下,不同目标对象所对应的数据信息参量也有所不同。在无人机多目标自动跟踪系统中,为使系统主机能够对待测目标对象进行准确定位,在提取目标节点特征之前,必须对所得数据信息参量进行重排处理[13-14]。设δ表示待测目标对象排列系数的最小取值,Aδ表示与系数δ匹配的目标对象定义参量,表示目标对象定义参量的平均取值,联立上述物理量,基于深度学习的无人机目标节点特征提取模型为:
式中,f表示无人机目标对象提取权值,β表示目标对象节点编码系数,ΔS表示无人机待测目标数据的单位累积量。由于系统主机的运行速率不可能为零,所以系数ΔS的取值必须大于自然数“1”。
2.3 方向跟踪向量
方向跟踪向量决定了系统主机对于无人机目标对象的处理能力,在已知目标节点特征表达式的前提下,若方向跟踪向量的取值大于零,则表示目标对象的行进方向为正方向;若方向跟踪向量的取值小于零,则表示目标对象的行进方向为负方向[15-16]。在求解方向跟踪向量时,需掌握无人机目标节点定义系数的具体取值。设v1、v2、…、vn表示n个不同的无人机目标节点定义系数,b1、b2、…、bn分别表示与v1、v2、…、vn相对应的无人机目标对象方向度量系数,联立式(1),可将无人机多目标自动跟踪系统所遵循的方向跟踪向量求解表达式定义为:
其中,λ表示无人机运动距离系数,ϖ表示运动转向角度系数。在上述系数指标的支持下,完成跟踪系统的软件方法设计。
3 实验分析
选择A、B 两个对象作为跟踪目标(实验原理如图5 所示),分别利用基于深度学习的多目标自动跟踪系统(实验组)、基于地空信息融合的控制系统(对照组)对所选目标对象的运动行为进行监测。

图5 实验原理
实验的执行流程如下:
步骤一:选择Inspire 1 型号的无人机飞行器作为实验对象;
步骤二:利用实验组系统控制所选无人机飞行器;
步骤三:调节遥控装置,使无人机设备能够准确定位目标对象A、目标对象B 的运动状态,将所得实验数据作为实验组变量;
步骤四:利用对照组系统控制所选无人机飞行器;
步骤五:重复步骤三,将所得实验数据作为对照组变量。
无人机飞行器所采集到目标对象像素数值与预设像素指标之间的差值,可以反映出系统主机对于待测目标的跟踪准确性,通常情况下,差值水平越大,系统主机准确跟踪无人机目标对象的能力也就越强。
表1为本次实验测试的目标对象像素数值结果。
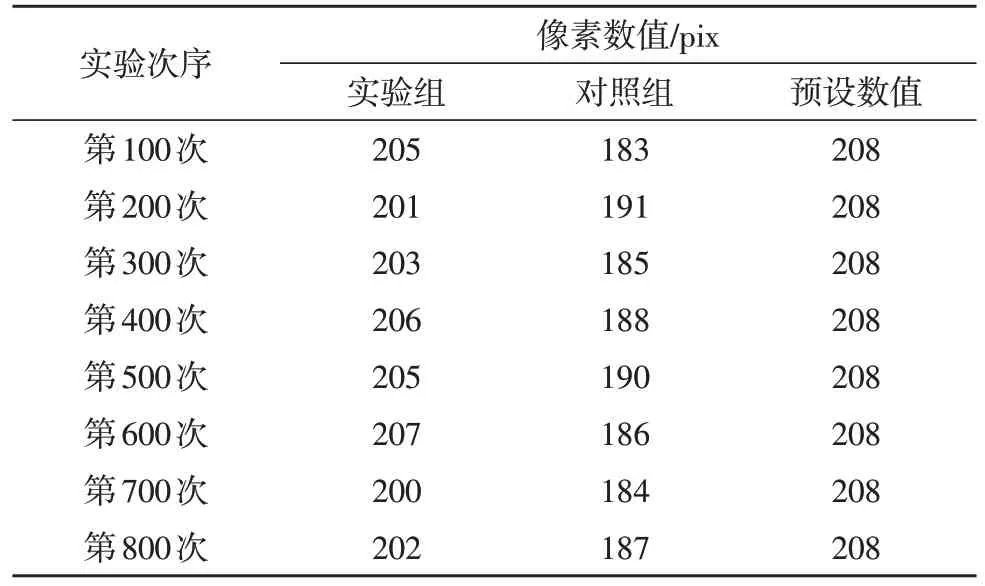
表1 目标对象A的像素数值
分析表1 可知,对于目标对象A 而言,在整个实验过程中,预设像素数值始终等于208 pix;实验组像素数值在第600次实验取值水平最大,达到了207 pix,与预设像素数值之间的差值为1 pix;对照组像素数值在第200次实验取值水平最大,达到了191 pix,与预设像素数值之间的差值为17 pix,低于实验组差值水平。
分析表2可知,对于目标对象B而言,在整个实验过程中,预设像素数值始终等于204 pix;实验组像素数值在500 次和600 次实验取值水平最大,达到了204 pix,与预设像素数值达到一致;对照组像素数值在第300次实验取值水平最大,达到了183 pix,与预设像素数值之间的差值为21 pix,也低于实验组差值水平。
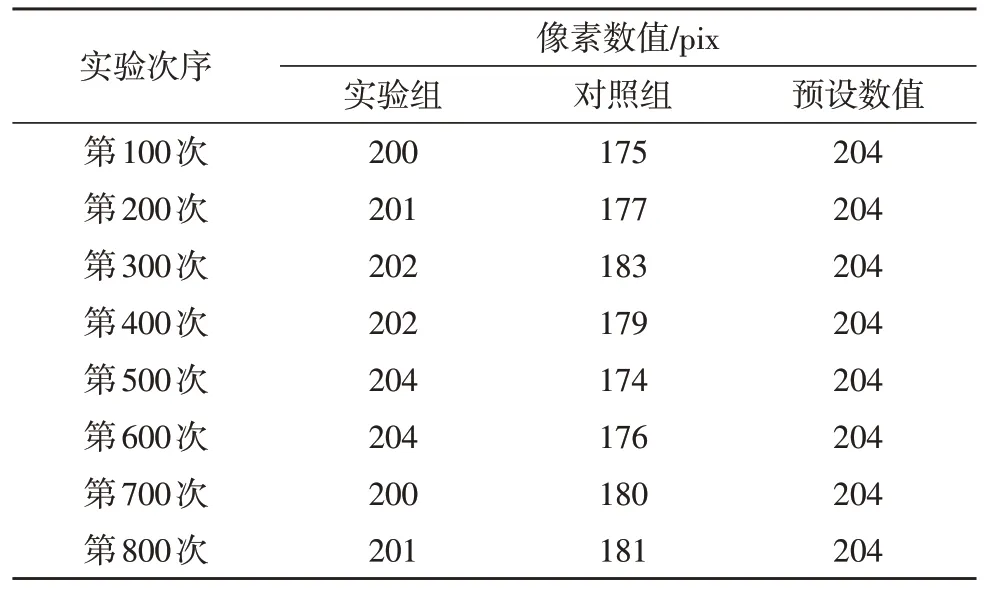
表2 目标对象B的像素数值
综上可知,在深度学习网络的应用下,系统主机所采集到的无人机目标对象像素数值水平明显增大,实用性能更好,说明所设计系统更符合无人机捕获待测目标的实际应用需求。
4 结束语
新型无人机多目标自动跟踪系统遵循深度学习网络机制,完善无人机操纵平台、目标节点处理模块等多个硬件结构之间的连接关系,又利用目标节点特征取值结果,求解方向跟踪向量的具体数值。在实用性方面,深度学习型多目标自动跟踪系统可使无人机目标像素的数值水平更好贴合预设像素指标,与准确跟踪无人机待测目标的实际应用需求相符合。
猜你喜欢
艺术家(2023年8期)2023-11-02 02:05:28
小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:30
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
红领巾·萌芽(2019年8期)2019-08-27 15:30:15
电子制作(2018年2期)2018-04-18 07:13:25
CHIP新电脑(2016年3期)2016-03-10 14:22:03
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
物理实验(2015年9期)2015-02-28 17:36:51
数学年刊A辑(中文版)(2014年4期)2014-10-30 01:50:32
声学技术(2014年2期)2014-06-21 06:59:14
