
智能交通车辆识别检测技术研究
2023-09-16 03:34:13罗辉
智能建筑与工程机械 2023年7期
关键词:智能交通
罗辉

摘 要:为了解决目前交通存在的污染、拥挤以及安全交通事故等问题,将现代化人工智能、电子传感、信息通信等新技术,用于智能交通车辆识别检测意义重大。基于此,对智能交通车辆图像采集系统具体设计方案进行概述,包括数据采样端、图像质量评估端、大数据分析端,设计图像采集功能模块,完成设备视频设置,视频图像保存、压缩与传输等功能,对已采集图像进行去燥、增强对比度等预处理,提出基于背景差法融合帧差法的车辆检测算法。研究结果表明:此种方法可以很好的解决经典检测算法的缺点,提高检测精度,排除干扰,降低车辆误检率,可以成功识别不同类型车辆,构建全面、高效、科学的智能交通系统。
关键词:智能交通;车辆识别;车辆检测
中图分类号:U495 文献标识码:A 文章编号:2096-6903(2023)07-0093-03
0 引言
随着城市发展进程不断加快,交通需求与日俱增,基础设施建设速度相应加快,随之而来的交通拥挤与安全事故,成为给城市交通发展带来困扰的重大问题。那么设计智能交通系统,对于改善交通发展降低污染有重大推动作用,车辆识别一般运用数字摄影与计算机信息管理技术,进行图像处理与识别等辅助技术下,完成车辆数据采集及处理的过程[1]。车辆检测技术则运用视频图像实现交通监管,从而获取所需图像信息。车辆交通识别检测技术作为目前智能交通系统中应用比较广泛的技术之一,能够为实现智能交通提供数据支撑,因此本文展开对智能交通车辆识别检测技术的研究,对全面建立由智能交通系统意义重大。
1 车辆图像采集系统设计
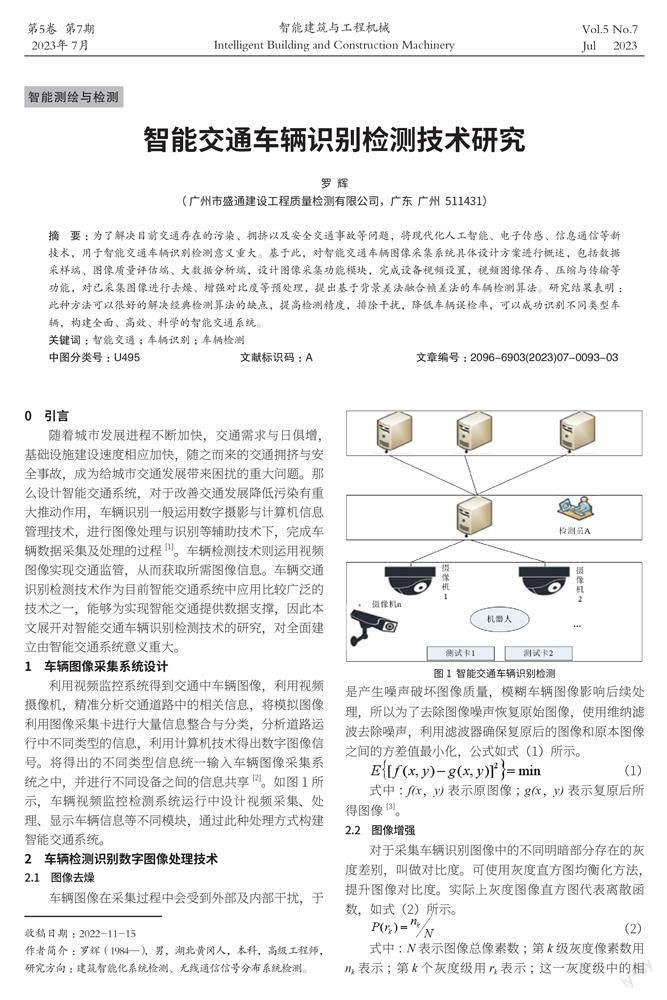
利用视频监控系统得到交通中车辆图像,利用视频摄像机,精准分析交通道路中的相关信息,将模拟图像利用图像采集卡进行大量信息整合与分类,分析道路运行中不同类型的信息,利用计算机技术得出数字图像信号。将得出的不同类型信息统一输入车辆图像采集系统之中,并进行不同设备之间的信息共享[2]。如图1所示,车辆视频监控检测系统运行中设计视频采集、处理、显示车辆信息等不同模块,通过此种处理方式构建智能交通系统。
2 车辆检测识别数字图像处理技术
2.1 图像去燥
2.2 图像增强
图像对比度增强主要包括两种方法,分别是直接对比度增强和间接对比度增强,间接对比度增强法中直方图拉伸、直方图均衡化运用较为常见,直方图拉伸可以利用对比度拉伸调整直方图,将图像背景与前景之间的灰度差别进行调整,从而增强对比度[4]。直方图均衡化利用“中心思想”,灰度直方图在某一灰度区间中分布,呈现出非线性拉伸状态,对图像像元值进行集中处理与分析,由此得出灰度范围内像元数量。
3 帧差法融合背景差分车辆检测
3.1 融合技术的车辆检测
将这两种算法融合就是利用不同传感器,依据某一算法综合处理多幅图像,主要就是为了将多个数据源图像内的互补信息与冗余信息充分融合,从而强化图像信息,提高图像质量可靠性,保证融合后所获图像的良好鲁棒性,有助于分析、理解与检测图像[5]。
帧差法除了具有快速运算、计算过程比较简单、光线变化整体敏感度不高、鲁棒性较强等优点外,还因为邻近两帧图像存在较短的间隔时间,算法并不受背景变更影响(使用中可以不随背景更新而变化)。其缺点就是无法对静止车辆加以检测。而背景差分算法则可以满足动静车辆的同时检测,并且此算法的计算原理比较简单,并不涉及求解均值等运算的过程,所以整体难度不高。但缺点是面临环境背景的多变性,需要不断更新背景预防环境变化所致检测误差。
在车辆检测中引入融合思想,将上述两种方法结合,处理车辆识别的视频图像,提取背景完成车辆检测,选择适当的邻近帧检测,然后通过像素融合两种方法的各自处理结果,最终获得检测图像提高了车辆检测精度。不仅减小了计算量,还保证了检测实时可靠性。融合规则主要运用加权平均法,其权重系数可调节的适用范围较广,可以将部分噪声成功消除减少源图像信息损失[6]。
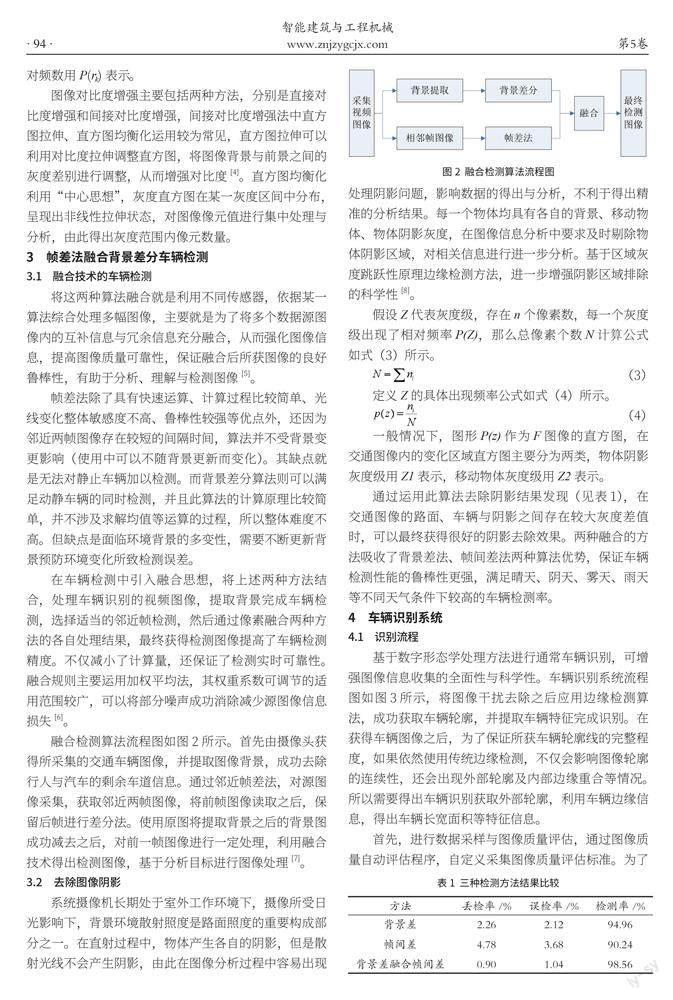
融合检测算法流程图如图2所示。首先由摄像头获得所采集的交通车辆图像,并提取图像背景,成功去除行人与汽车的剩余车道信息。通过邻近帧差法,对源图像采集,获取邻近两帧图像,将前帧图像读取之后,保留后帧进行差分法。使用原图将提取背景之后的背景图成功减去之后,对前一帧图像进行一定处理,利用融合技术得出检测图像,基于分析目标进行图像处理[7]。
3.2 去除图像阴影
系统摄像机长期处于室外工作环境下,摄像所受日光影响下,背景环境散射照度是路面照度的重要构成部分之一。在直射过程中,物体产生各自的阴影,但是散射光线不会产生阴影,由此在图像分析过程中容易出现处理阴影问题,影响数据的得出与分析,不利于得出精准的分析结果。每一个物体均具有各自的背景、移动物体、物体阴影灰度,在图像信息分析中要求及时剔除物体阴影区域,对相关信息进行进一步分析。基于区域灰度跳跃性原理边缘检测方法,进一步增强阴影区域排除的科学性[8]。
通过运用此算法去除阴影结果发现(见表1),在交通图像的路面、车辆与阴影之间存在较大灰度差值时,可以最终获得很好的阴影去除效果。两种融合的方法吸收了背景差法、帧间差法两种算法优势,保证车辆检测性能的鲁棒性更强,满足晴天、阴天、霧天、雨天等不同天气条件下较高的车辆检测率。
4 車辆识别系统
4.1 识别流程
基于数字形态学处理方法进行通常车辆识别,可增强图像信息收集的全面性与科学性。车辆识别系统流程图如图3所示,将图像干扰去除之后应用边缘检测算法,成功获取车辆轮廓,并提取车辆特征完成识别。在获得车辆图像之后,为了保证所获车辆轮廓线的完整程度,如果依然使用传统边缘检测,不仅会影响图像轮廓的连续性,还会出现外部轮廓及内部边缘重合等情况。所以需要得出车辆识别获取外部轮廓,利用车辆边缘信息,得出车辆长宽面积等特征信息。
首先,进行数据采样与图像质量评估,通过图像质量自动评估程序,自定义采集图像质量评估标准。为了解决人工判断误差,通过布设标准测试卡与摄像机设备之后,返回识别信号可以利用机器视觉技术完成图像质量评估,用于判断图像的清晰程度[9]。
其次,完成车辆图像预处理后,克服图像鲁棒性快速准确定位车牌,根据颜色特征、纹理特征、形状特征、灰度跳变特征,即可根据图像性质不同,设计基于灰度图像的定位算法,也可设计基于彩色图像定位算法,划分为基于区域、边界、彩色空间等分割定位方法。
最后,利用大数据技术设计图像质量追溯系统,用于对历史图像质量追溯。采用Spark大数据平台存储、查询图像质量的评估过程与结果,所存储的相关数据包括了摄像机设备类型,机器人的相对位置,相对高度以及光照强度,与人工检测现场相关数据,以及摄像图传回测试卡图像。Spark可以基于现有Hadoop分布式文件系统基础上,利用特有Shark/Spark SQL接口,存储平台选择Spark为后续数据分析、挖掘奠定基础。
此系统满足机器人采用远距离WIFI遥控,操作响应时间应在3 s内。对图像自动评估系统而言,在检测人员选定图像进行判断时,其响应时间应在1 s内,判别结果应与人工评估结果误差在5%内。大数据库技术对存储规模没有限制,其主要技术指标在于存储和查询的响应速度上,初步要求其存储和查询的响应时间应在2 s内[10]。
4.2 特征识别
首先,在提取车辆轮廓阶段,选用canny边缘检测获取目标车辆边缘轮廓,根据检测边缘效果能够发现尽管这种方法可以很好的提取车辆平滑轮廓,可是依然存在边缘断裂问题,无法精准完整的描绘车辆轮廓。这就需要对车辆边缘完成一系列的膨胀、腐蚀等数学形态学处理过程,最终获得完整连续的车辆轮廓图。
其次,在车辆分类阶段,选用单个摄像头以不同的安装角度拍摄车辆上方信息,以车辆的长宽完成车型判断,具体划分为大车一类、小车二类、超长车三类,从而很好的区分车辆。
再次,在计算车辆特征参数阶段,使用像素法进行计算,需要计算的面积就是包含轮廓之内的像素数,根据公式f(x,y)=1的个数即可完成计算,其中背景用0表示,车辆用1表示,(见表2)作为上述分类的3种不同车辆计算周长、面积、长宽等几何参数结果。
最后,在车辆类型识别阶段,划分为三类目标,运用线性分类器完成识别,遵循Fisher准则、感知准则、最小平方误差准则等思想,确保各类群类内距离尽可能的小。增加类间距离,利用车辆识别分类系统,基于Fisher准则构建线性分类器准则函数,得出线性识别判定函数,进一步优化车辆信息检测、识别与分析。
5 结束语
利用智能交通车辆识别检测技术、机器人应用技术、大数据技术,发现提高了图像质量判断效率,增强检测准确度。设计图像采集功能模块,完成设备视频设置,视频图像保存、压缩与传输等功能,对已采集图像进行去燥、增强对比度等预处理,可以成功识别不同类型车辆,构建全面、高效、科学的智能交通系统。
参考文献
[1] 肖玉红.浅析智能交通中车辆检测技术的发展和应用[J].汽车测试报告,2021(19):20-21.
[2] 曲爱妍吴秋玲张正梁颖红黄晓婷.基于车标区域的智能识别方法研究[J].软件工程,2021,24(10):37-40,36.
[3] 王林,柴江云.深度神经网络在多场景车辆属性识别中的研究[J].计算机工程与应用,2021,57(9):162-167.
[4] 李洋,韩伟,沈晖,等.基于全景视频检测技术的智能交通综合管控方法研究[J].道路交通科学技术,2021(2):15-19.
[5] 余明高,王连涛,闵凡蕾.面向智能交通引导的车辆检测算法改进[J].计算机技术与发展,2022,32(9):43-50.
[6] 罗运鑫,佘堃,于钥,等.基于忆阻神经网络的车辆标志识别技术研究[J].信息安全研究,2021,7(8):715-727.
[7] 任高翔,底帅,彭剑林.基于MagFace损失函数的停车场智能人脸识别寻车系统研究[J].电子技术与软件工程,2021 (16):142-145.
[8] 陈耀祖,谷玉海,成霞,等.基于优化YOLOv4算法的行驶车辆要素检测方法[J].应用光学,2022,43(2):248-256.
[9] 孔烜,张杰,邓露,等.基于机器视觉的车辆检测与参数识别研究进展[J].中国公路学报,2021,34(4):13-30.
[10] 王志红,王少博,颜莉蓉,等.基于语义分割模型的路面类型识别技术研究[J].公路交通科技,2021,38(1):128-134.
猜你喜欢
计算机应用(2016年12期)2017-01-13 01:41:32
物联网技术(2016年11期)2017-01-12 21:49:02
中国管理信息化(2016年21期)2016-12-27 15:13:52
现代商贸工业(2016年14期)2016-12-27 14:32:16
科技创新与应用(2016年34期)2016-12-23 15:54:44
电子技术与软件工程(2016年20期)2016-12-21 09:28:29
电子技术与软件工程(2016年19期)2016-12-19 18:42:01
电子技术与软件工程(2016年19期)2016-12-19 17:08:08
数字技术与应用(2016年9期)2016-11-09 23:02:51
科学与财富(2016年28期)2016-10-14 04:43:28
