
基于模糊控制的纯电汽车再生制动控制策略研究
2023-09-15 09:15韩聪刘成晔
机械工程师 2023年9期
韩聪,刘成晔
(江苏理工学院 汽车与交通工程学院,江苏 常州 213001)
0 引言
当前全世界能源应用正处于转型时期,与传统化石燃料汽车相比,纯电动汽车具有噪声低、加速性好、空间利用率高等特点,纯电动汽车大有取代传统化石燃料汽车的趋势。然而目前纯电动汽车发展受到的最大的限制就是纯电动汽车续航里程的不足[1],而在短时间汽车电池无法取得原理上的突破,能量回收也就成了提高纯电动汽车续航能力的一个重要手段。
采用再生制动是一种比较优异的提高续航能力的方式之一,Gao Yimin等[2]提出3种经典的电动机制动力分配策略,并对这3种策略在不同路况进行了分析比较,极大地提高了能量回收效率,但是研究与实际数据相差较大。赵国柱等[3]通过载荷比例阀调节汽车载荷,提出基于不同载荷下的控制策略,该方案显著提升了车辆再生制动能量回收效率,但由于模式过于单一,无法综合考虑汽车再生制动过程中各种复杂因素。吴强等[4]针对坡度以及ECE法规对汽车制动力分配方案进行了优化,极大地提高了汽车制动力分配方案的通用性,但是其研究过于偏重坡度对于汽车前后制动力的分配,只能对现有的研究进行一定的补充。
本文研究对象为前置前驱纯电动汽车,提出一种基于模糊控制的再生制动控制策略优化方案,对在AVL CRUISE中搭建的整车模型进行验证,利用Simulink和Cruise平台进行联合仿真。
1 前后制动力的分配
1.1 理想制动力分配曲线
当汽车在制动过程中,会出现轮胎抱死现象,一般分为3种情况:第一种情况是前轮先抱死,第二种则是后轮先抱死,第三种也是最优情况为前后轮一同抱死[5]。
当前轮先抱死时,由于前轮是转向轮,这会导致汽车在制动时方向锁死,此时虽然影响纯电动汽车制动时的方向性,但并不会影响纯电动汽车制动的安全,所以在制动过程中如果需要提高前轮制动力的占比,可以在满足ECE法规的同时维系这一过程。
而后轮先抱死时,由于惯性的作用,汽车会出现甩尾的现象,影响汽车稳定性。因为该情况会造成纯电动汽车制动的危险性,所以应该避免这一过程的出现,即纯电动汽车后轮制动力不得高于I曲线。
而当汽车前后轮同时抱死时,会使得纯电动汽车附着条件得到最大的利用,使得纯电动汽车与地面摩擦力最大,让纯电动汽车制动处于稳定性最佳状态。如果想要在附着系数为μ的路面上达到这一效果,不仅仅要求前后轮摩擦制动力之和等于地面对纯电动汽车施加的附着力,还要求前后轮的制动摩擦力分别等于各自的地面附着力,即:
式中:Fμ1为前轮与地面的摩擦力;Fμ2为后轮与地面的摩擦力;G为汽车受到的重力;Fz1为地面对前轮的支持力;Fz2为地面对后轮的支持力。
当前后轮制动力达到这一要求时,其制动强度z达到最大值且等于附着系数μ,即z=zmax=μ,则表示汽车制动力达到地面最大附着力。由此可得:
式中:hg为纯电动汽车质心距离地面的高度;a为前轴距;b为后轴距。
故把这种最佳状态方程所制作出的曲线称之为理想制动力分配曲线(I曲线),计算公式为
式中,L为纯电动汽车车身长度。
1.2 ECE法规曲线
为了保障车辆制动的安全性,欧洲经济委员会提出ECE法规[6],当μ处于[0.2,0.8]时,制动强度z应满足
式中,μ为地面附着系数。
由此可得,ECE法规曲线(M曲线)边界方程如下所示:
式中:Fx1为前轮制动力;Fx2为后轮制动力。
为了保障汽车在制动时的方向性,后轴制动力不得低于ECE法规曲线[7]。所以当前后轮制动力进行制动力分配时,通常会将后轮制动力取在I曲线和M曲线之间。
1.3 前后制动力分配
通常我们会为了提高对地面附着系数利用率而选择I曲线,本文前后轮制动力分配则根据纯电动汽车再生制动的需要进行一种合理的分配,在保障制动安全的前提下,使得电动机再生制动最大化。
如图1所示,本文设计一种以ABCD曲线来分配前后轮制动力,以确保障纯电动车制动安全的同时,提高纯电动汽车的驱动轮即纯电动车的前轮制动力,从而提高电动机制动力可分配力的基数,进而达到能量回收效率的最大化。
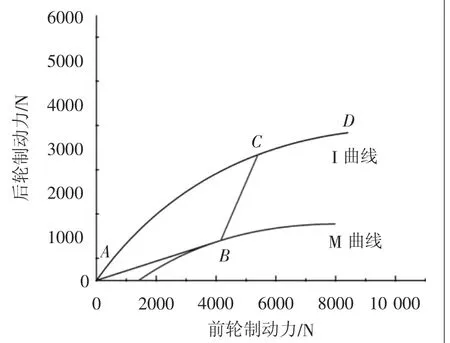
图1 制动力分配曲线
当所需制动力处于AB段,即z在[0,0.43]范围内,由于此时制动力整体偏小,故电动机力也会相对偏小,为了保证纯电动汽车在轻中度制动时能够提高电动机利用率,制动力沿原点做M曲线的切线做分配,其中B点为切点。当纯电动汽车制动强度在该阶段时,在不影响纯电动汽车驾驶安全的前提下优先保障纯电动汽车前轮驱动轮的制动力。
当所需制动力处于BC段,即z在[0.43,0.7],此时制动力已经足够大,为了减轻前轮刹车片磨损,同时提高制动稳定性,取z=0.7时I曲线上的C点,制动力按BC段分配。当纯电动汽车制动强度在该阶段时,其前后轮制动力分配的主要目的为提高纯电动汽车后轮制动力占比,以减轻前轮制动器的制动压力。
当所需制动力处于CD段,即z在[0.7,0.8]时,此时汽车制动力临近抱死点,纯电动汽车制动力接近地面对纯电动汽车的附着力,所以将前后轮制动力沿I曲线进行分配,保障汽车能最大程度利用附着条件,提高汽车制动稳定性。当纯电动汽车制动强度处于该阶段时,由于纯电动汽车制动力非常大,所以此时的前后轮制动力分配目标为附着系数利用最大化,提高纯电动汽车制动效率。
而当z>0.8时,为保障汽车制动时安全,制动力分配锁死在z=0.8上且电动机不再工作,完全由纯电动汽车主动制动器进行制动。当纯电动汽车处于该阶段时,纯电动汽车制动力已经达到纯电动汽车地面附着摩擦力的上限,即z=zmax,继续增大制动强度只会造成纯电动汽车抱死,影响纯电动汽车制动安全,故将其制动力稳定在z=0.8的地方。
2 模糊控制器设计
本文取3个制动时影响电动机制动强度的因素作为输入值:制动强度z、荷电状态SOC、车速V。选取电动机制动比例K为输出值。
上述所有变量的论域均为[0,1],因为当荷电状态SOC过大时,频繁充放电会影响电池寿命[8],故将荷电状态SOC模糊子集设定为{L(Low),M(Middle),H(High)}。同理,车速V和制动强度z均为模糊子集为{L,M,H},电动机制动比例K的模糊子集为{VS,S,M,L,VL}。
当纯电动汽车荷电状态SOC处于中位和低位时,应该优先保证纯电动汽车的再生制动,以达到节约能源的目的。而当车速处于低位时,此时再生制动能量也处于低位,不应该过多分配制动力给电动机。
所以根据经验数据,隶属度函数如图2所示。为了保障汽车制动安全性的同时最大化回收制动能量,对电动机制动比例K进行加权解模糊,模糊规则如表1所示。
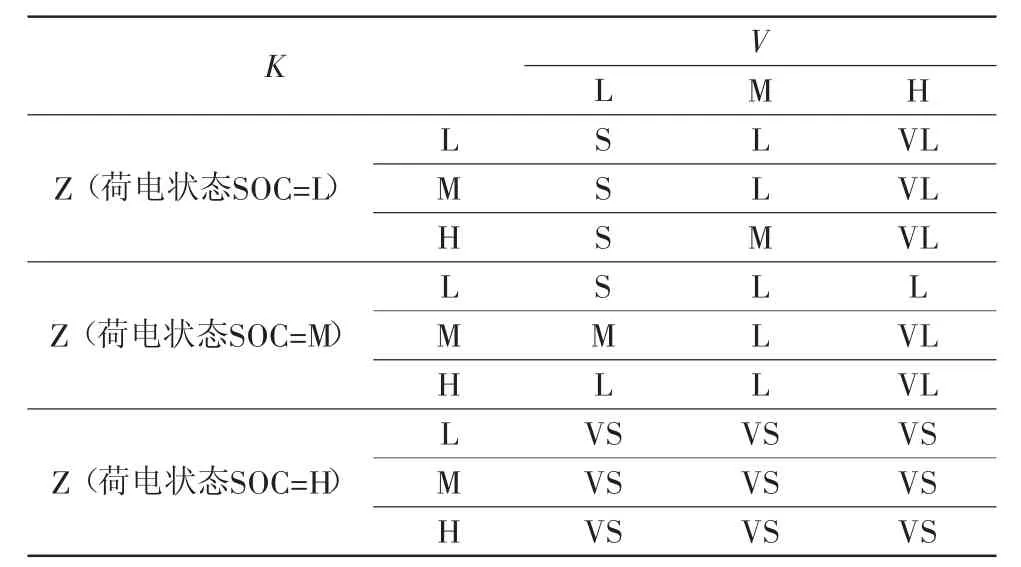
表1 模糊规则

图2 模糊控制隶属度
3 仿真模型的建立
3.1 Cruise模型的建立
本文仿真软件为AVL Cruise,控制策略编写软件为Simulink,通过Cruise软件里的Matlab dll模块进行联合仿真,Cruise搭建纯电汽车所需环境及模型,用Simulink建立纯电汽车再生制动控制策略,并编译成dll文件导入Cruise,选用NEDC(New European Driving Cycle)工况进行模拟仿真验证再生制动控制策略的优化效果。本车Cruise建模如图3所示。

图3 纯电动汽车Cruise模型
本文选用的是一辆前置前驱的纯电动小汽车,具体车辆参数如表2所示。
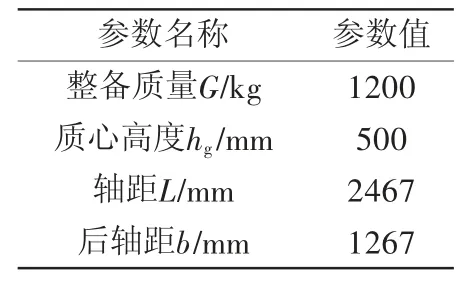
表2 纯电动汽车参数
3.2 Simulink控制策略的建立
本文所采用的控制策略分为两层,如图4所示,第一层为前后轮制动力分配,Cruise模型总制动力接口传递过来的制动力需求转换为制动强度,依照前文所制定的ABCD曲线进行前后摩擦制动力的分配,将根据模型所分配后的后轮摩擦制动力传递给Cruise接口,并将分配后的前轮制动力进行第二层分配。
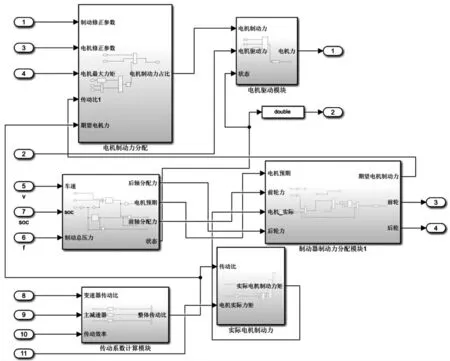
图4 Simulink控制策略
第二层制动力分配则是对驱动轮——前轮的主动制动器和电动机制动力进行模糊控制分配,当Cruise模型运行时,模型将车速、制动需求和荷电状态SOC通过接口传递到Simulink模型中,其根据本文所制定的模糊控制器来分配电动机力的比例,算法根据比例计算电动机力传递给电动机制动。当电动机制动力高于电动机最大制动力时,电动机将以电动机最大制动力进行制动。算法根据Cruise模型实时传递的电动机力力矩进行换算,从而得出前轮主制动器制动力,并将其传递给Cruise模型接口。
再生制动控制策略制定完成后,通过Simulink的C Code模块的Mex编译器进行编译成dll文件,并在Cruise中的Mtalab dll模块中调用。在运行过程中,为方便运行,取Cruise采样时间为0.05 s,每两次采样记录一次,而再生制动控制策略的Simulink的采样时间则定为Cruise采样时间的1/10,即0.005 s。
4 仿真结果分析
本文工况选用的是NEDC工况,驾驶员模型选择的Standard, 环 境 模 型 选 择Standard。为了能更加直观地反映算法优化情况,本文采取了多次循环工况。
首先,由图5多次循环下的荷电状态SOC值对比可知,优化后的再生制动控制策略比优化前节约了近0.5%的电量,提高了纯电动汽车的续航里程。与传统固定比例分配相比,该优化算法对中低速电动机力制动占比进行了提高,对制动能量回收的效率进行了优化,从而减缓纯电动汽车的能量消耗,提高了纯电动汽车的续航里程。从图中可以看出,在短时间内,与传统固定比例分配模型相比,该模型并没有太大优势,甚至有细微的劣势,一旦将运行时间拉开后,模糊优化算法的优势开始显现。
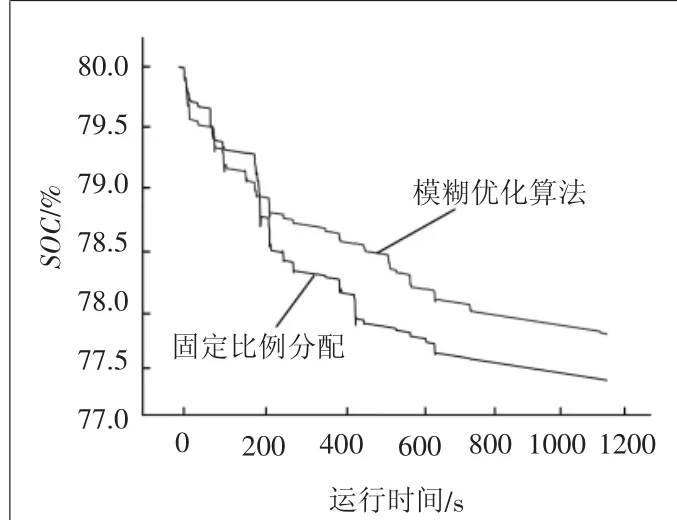
图5 SOC对比图
其次,由图6多次循环工况下纯电动汽车电池充放电的对比可知,优化后的电动机充电电流峰值要比优化前要小14 A,这表明优化后能量回收更有利于保护电池的充放电,在纯电动汽车制动能量回收中,容易因为瞬时电流过大而导致电池薄膜被击穿,从而造成短路现象,该模型通过提高充电次数来降低单次电流峰值,从而避免因瞬时电流值过大导致电池短路。

图6 电流对比图
最后,由图7多次循环工况下电动机转矩的对比可知,优化后在电动机正向驱动工况下,电动机转矩和优化前并无区别,说明该算法并不会影响纯电动汽车加速性能。但在表示电动机制动的反向转矩上,优化后的算法在波形上更密,转矩也更大,制动力矩的占空比更大,制动也更加频繁,这说明优化后的再生制动控制策略更加充分利用了电动机力,提高了能量回收效率,大大增加了纯电动汽车的续航里程,同时降低了纯电动汽车的刹车片的磨损。
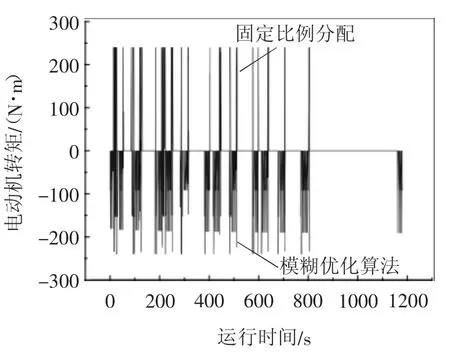
图7 转矩对比图
由此,从这3张图的对比我们能清晰地看出,该模糊优化算法是通过提高中低速状态下电动机制动的占空比,从而达到比传统固定比例分配算法的电流峰值更低、续航里程更长的效果。
5 结语
对于目前纯电动汽车在再生制动过程中能量回收效率不佳的问题,本文制定了一个基于模糊控制的再生制动过控制策略,并将其导入AVL Cruise和Simulink进行联合仿真,得出以下结论:1)通过制定前后轮制动力分配与模糊控制相结合,提高了驱动轮制动力占比;2)通过对模糊控制的隶属度函数的优化,提高了电动机能量回收效率;3)优化后的控制策略使得荷电状态SOC的消耗降低了0.5%,充电电流减小了14 A,提升了纯电动汽车的使用寿命。
猜你喜欢
汽车观察(2023年3期)2023-05-30
装备制造技术(2021年4期)2021-08-05
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
山东交通学院学报(2020年2期)2020-07-13
读者·校园版(2019年10期)2019-05-09
红蜻蜓·低年级(2015年11期)2016-02-02
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
中国自行车·骑行风尚(2014年4期)2014-10-10
