
一种自动上浮式定深采水装置的设计
2023-09-15 09:15金志远曹露李强赵西增段玮玮
机械工程师 2023年9期
金志远,曹露,李强,赵西增,段玮玮
(浙江海洋大学a.船舶与海运学院;b.海洋工程装备学院,浙江 舟山 316022)
0 引言
随着工业化的不断推进,环境污染对人类生活的影响日益严重,其中水污染、海洋环境污染等问题尤为凸出,对湖泊、河流、海洋等水域的水质检测、生物采集、微塑料采样等就显得尤其重要。获取具有代表性的样本是进行研究的首要步骤,同时也是样本检测与管理的一个重要环节[1]。在此过程中大部分情况都需要人们去现场使用采水装置来收集所需样本,然后在现场进行简单过滤或者直接带回实验室并用特定的实验设备进行研究分析。根据水样的采集要求,有时候需要在不同深度依次进行采样,以此来获取梯度剖面的现场水体信息,以保证分析结果的统一性、规范性和类比性[2]。
国内目前大部分使用的采水装置是通过所释放的缆绳来确定装置在水里的下放深度,由于所绑的缆绳可能会受到水流和人为因素的影响,因此会导致装置并没有到达我们所需的深度或者超出了深度范围。大型CTD和玫瑰采水器的组合可以很好地实现准确的定压采水,但是设备体积庞大,不适合在水库、湖泊等复杂地形进行采水,因此并不适合大范围的推广[3];目前大部分采水装置采集完毕时,人们会通过所系的缆绳来把整个装置慢慢地从水下提出水面,这样会比较费时费力。当然也有一些采水装置可以通过船上的绞车来进行回收,但是这样的采水装置大部分都比较庞大且厚重,不适用于小型船只。
因此设计一款能够在不同水深进行精确采水且能自动上浮的采水装置就显得十分重要。本文所设计的自动上浮式定深采水装置通过压力传感器来确定采水深度,装置外壳上附有负压采水袋,当在预设深度采集完水样后,通过单片机将气体存储罐里的气体释放出来并进入气囊,从而带动整个采水装置上浮,具有经济、实用、便利等优点。
1 定深采水装置的设计
自动上浮式定深采水装置包括主壳体、负压采水袋、气体存储罐及气囊等部分。主壳体内设置有以STM32单片机为核心的控制系统,该系统包括LCD显示模块、电源模块、电磁阀驱动电路、按键模块、北斗定位模块及压力传感器模块。LCD显示模块采用了LCD1602液晶显示器,在准备阶段设置采水的深度时,能通过该显示器直观地显示工作数据;电磁阀驱动电路分别控制2个电磁阀,电磁阀一控制气体存储罐的气体释放,电磁阀二控制负压采水袋入水口的开闭;按键模块选择了能节省I/O口资源且用途更广的矩阵键盘;北斗定位模块可用于标记采水装置的位置,方便进行装置回收;壳体外的压力传感器用来测定不同水深中的压力,将实时的水压数据通过电信号传送给单片机,然后通过压强转换来换算水深。该控制系统整体框图如图1所示。

图1 控制系统整体框图
负压产生装置选择负压引流球、负压波纹管或真空负压瓶,这种负压环境可以在船上或者岸上时通过手动来产生,方便快捷,负压采水袋可以多次利用,以避免浪费。如图2所示,该负压采水袋分别设置了入水管4、出水管1及连通管6。入水管4位于采水袋的上部,电磁阀二设置于入水管4处;出水管1位于采水袋的下部;连通管6与负压产生装置连接,在连通管6上设置了一个阀门7,当想要产生负压环境时就打开阀门,形成负压后再关闭阀门。该装置主壳体的截面设置为圆形,负压采水袋环绕壳体的外壁紧紧贴合。如图3所示,沿着主壳体的竖直方向分别在外壁的上下两端设置了2个卡接管,负压采水袋的入水管4与外壁上端的卡接管一12相连通,出水管1与外壁下端的卡接管二14连通。主壳体的外壁上还设置了一条夹缝8,该夹缝的间隙不能小于负压采水袋的入水管与出水管的管径且不能大于连通管的管径。在安装时,将采水袋的2个进出水管穿过夹缝与2个卡接管连接好,而连通管并不穿过夹缝,放置于夹缝的另一边。这样在采集水样时,就不会因为采水袋装满水而导致脱落。如此设计简单方便,利于采水袋的多次利用,提高了装置的稳定性。
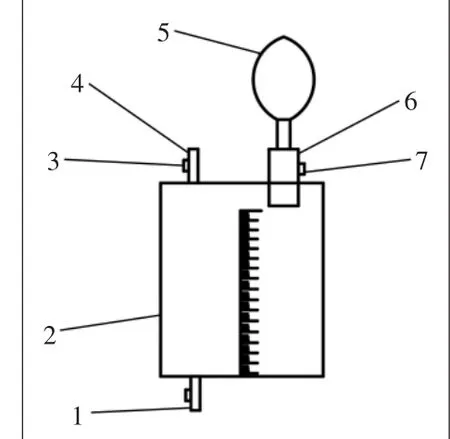
图2 负压采水袋结构示意图
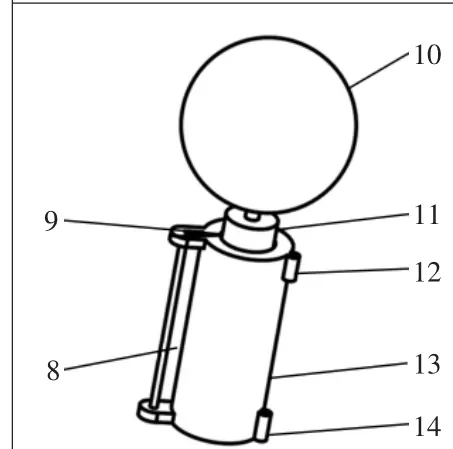
图3 装置的立体结构示意图
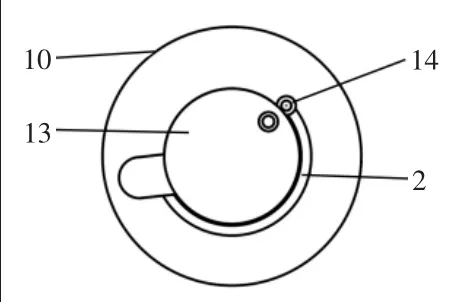
图4 装置的仰视图

图5 主壳体的剖面图
该装置的主壳体内设计了2个腔体,以单片机为核心的控制系统放置于下腔体内,整个控制模块可拆卸,便于在矩阵键盘上进行设置;如图3所示,气体存储罐11放置于上腔体中,在存储罐的出口处外接气囊10,存储罐与气囊之间连接了电磁阀一。主壳体的上腔体内设置有内螺纹,气体存储罐的外壁开设有外螺纹,内螺纹与外螺纹结合,使气体存储罐在上腔体内能够不受水流影响而晃动。
2 定深采水装置的工作原理
当到达预定地点准备采集水样时,先在岸上或者作业船上对装置进行例行检查,观察各部分是否正确连接及能否正常开机工作。首先通过矩阵键盘向控制系统输入想要采集水样的深度数据及采样时长t,然后将整个装置放入水中,通过自身的重力作用,使它慢慢下沉。当装置所处的深度h2与预设深度h1相差Δh时,单片机控制电磁阀一打开,气体存储罐开始将气体释放到气囊中(气体释放初期,此时装置的重力作用大于所受到的浮力,装置继续缓慢下沉);当装置所处的深度h2与预设深度h1相差为0时,单片机控制电磁阀二打开,然后负压采水袋开始进水,经预设时间t后关闭电磁阀二(采水完毕),此时充满气体的气囊给整个装置带来的浮力大于装置整体的重力,采水装置开始上浮,直到漂浮露出水面,最后通过远程定位终端与主壳体内的北斗定位系统相连接来确定装置所处的位置,进行打捞回收,则预定地点的定深采水工作完成。
3 定深采水装置的可行性分析
3.1 技术可行性分析
该定深采水装置是通过压力传感器受到的实时压力计算得出水深,同时利用单片机控制系统来实现水样采集及装置的自动上浮。单片机作为控制系统的核心,通过压力传感器将信号传送到系统中,控制系统与电磁阀驱动电路相连接,可通过单片机输出信号控制2个电磁阀的开闭(电磁阀作为气体释放与水样流入的阀门),解决了人工手动启闭的问题,实现了装置的自动化。电磁阀动作时间短,提高了采水动作的可靠性和准确性[4]。
该装置的定深采水与自动上浮技术实用性强,整个过程中自动化程度高,人工参与度低,所以该装置具备技术可行性。
3.2 结构可行性分析
该装置主要由带有控制系统的主壳体、负压采水袋、气体存储罐和气囊等主要部件组成。气体存储罐与气囊常见于水下救生设备,其他零部件皆可在市场上选到相应的标准件。
该装置的组成部件少,结构简单。与传统的采样设备相比,该装置体积小、质量轻、便于携带与回收,所以该装置具备结构可行性。
3.3 操作可行性分析
该装置的工作步骤:1)工作前准备,在岸边或者船上检查设备能否正常启动,各零部件是否已安装牢固;2)通过矩阵键盘向系统输入预设的采水深度以及采样时长;3)下放装置,当装置到达预设深度范围内时,单片机控制气体存储罐的电磁阀一打开;4)单片机控制负压采水袋的电磁阀二打开,开始采集水样;5)达到采样时长后,关闭电磁阀二,装置受到的浮力大于重力,装置上浮;6)装置漂浮到水面,根据北斗定位找到装置,进行打捞回收。
根据装置的工作步骤分析,该装置的人工操作步骤少,工作过程中自动化程度高,与传统的采样设备相比,操作简单、便于回收,所以该装置具备操作可行性。
3.4 经济可行性分析
该装置用到的单片机与传感器等电子元器件价格便宜、稳定性高、使用寿命长,负压采水袋可重复利用,减少了损耗,避免了不必要的浪费。该装置不仅可以应用于小型船只在湖泊、河流等水域的采样工作,也可用于大型的科考船。以STM32单片机为核心的控制系统在保证装置稳定性的同时,实现了定深自动采水与自动上浮功能,节省了人力物力,具有很好的经济效益[5],所以该装置具备经济可行性。
4 结语
本文针对现有传统采样装置的缺陷,设计出一种带自动上浮功能的定深采水装置,介绍了该装置的设计要求与工作原理,并从技术、结构、操作、经济方面论述了装置的可行性。
当该装置到达预设深度时,能够自动打开采水袋阀门进行水样采集,采集完毕后,能够自动上浮至水面并等待打捞回收。与传统采样装置相比,该装置操作简单、体积小、容易携带、造价较低、自动化程度较高、方便回收,在整个使用过程中省时省力。
猜你喜欢
减速顶与调速技术(2022年3期)2022-02-11
制造技术与机床(2019年4期)2019-04-04
户外探险(2018年9期)2018-09-11
中国自行车(2016年1期)2016-11-25
广东技术师范大学学报(2016年5期)2016-08-22
中国汽车界(2016年1期)2016-07-18
焊接(2016年2期)2016-02-27
石油工程建设(2014年5期)2014-03-20
当代畜禽养殖业(2014年9期)2014-02-27
