
基于实景三维技术的园林规划设计应用研究
2023-09-15 22:20:16高小慧胡永进马凯迪胡耀天
中国信息化 2023年8期
高小慧 胡永进 马凯迪 胡耀天


一、引言
随着地理信息、物联网、大数据、计算机等技术的飞速发展和规划设计理念的逐步提升,规划行业正在发生深刻的变革。在传统的园林规划设计中,常常采用1:500大比例尺地形图作为规划底图,存在数据采集工作量大、成本高、符号化不直观等问题;同时规划设计常采用CAD软件进行图形绘制,属性管理能力弱;二维数据难以整体了解现实世界中的地物特征、对规划区域现状描述能力不足,通过二维数据制作的效果图与现实世界真实情况难以完好的契合等问题。随着无人机行业以及实景三维技术的快速发展,对当前的规划和管理技术手段提出了更高要求,也给规划设计提供了全新的技术手段。
随着地理信息三维实景化技术的不断成熟,商业化的无人机价格、技术门槛越来越低,为规划设计提供了更多科学便捷的技术手段。采用大疆无人机构建规划区高精度实景三维地图模型,并通过地理信息技术进行空间规划分析,其直观易懂、规划效果实时展示、工作周期短等特点受到规划院和设计院的广泛关注,可应用于较大范围的园林规划设计、房地产项目展示、规划设计等领域。
本文拟开展基于实景三维技术的规划设计应用研究,通过大疆无人机进行高精度实景三维模型生产,并基于开源的Cesuim 3DGIS三维引擎进行规划设计,并通过三维平台进行日照分析、通视分析等空间分析技术,提高园林规划的技术水平,为大范围的园林规划设计等提供借鉴。
二、实景三维生产及平台关键技术
(一)实景三维概述
实景三维(3D Real Scene)是通过建立数字虚拟空间的方式,在三维场景中对现实空间中的物理实体进行真实化、立体化、时序化的映射与描述,实景三维作为新型的标准化测绘基础数据逐渐替代了传统的二维产品,为国家基础设施建设提供统一的信息化空间底座。实景三维数据可以在数字虚拟空间中建立具有结构化及语义化的地理实体模型,支持人机物的兼容理解与实时感知,以实景三维层级和表达内容为标准,其主要可分为部件级、城市级和地形级三种。
随着近些年遥感软硬件技术的极速发展,无人机实景三维建设已经成为当前的主流手段。其主要方法是利用无人机平台获取不同角度的倾斜数据,并辅以无人机位置及姿态等数据建立三维实景模型,主要步骤包括多视角影像匹配、联合平差、三角网构建、纹理映射等步骤。与传统摄影测量相比,这种方式提供了丰富的地物侧面纹理信息,在视觉效果上有了巨大提升,同时还提供了一个可量测的模型,将大量的外业调绘工作转为内业处理,大幅提升了测绘作业效率。
(二) 关键技术
本文研究涉及的园林规划为小范围场景,以大疆无人机为数据采集设备,通过无人机倾斜航测的方式构建小范围实景三维模型。
1.无人机倾斜航测系统
无人机航摄系统用于航空遥感影像的获取,其硬件设备主要包括无人机飞行平台和影像传感器,软件设备包括飞控系统、地面监控系统、发射与回收系统、数据传输系统等,这些设备和系统的共同作用可以实现无人机的遥感影像采集,并将数据传输到地面进行后续处理和分析。大疆无人机则对各个模块进行了高度集成,轻便小巧,方便作业。
2.像控布设与测量技术
像控点布设方案与测量精度直接影响了整个空间加密精度,因此科学的布设和测量方案至关重要。在1:500地形图测量时,像控点中误差应优于2cm。像控布设时,宜制作具有明显中心点的人工标志,根据航线设计的走向与间隔,按一定间距均匀分布于测区内。像控测量时,宜采用三角对中支架替代手扶对中杆的方式固定仪器,以保证观测精度。
3.多视影像匹配技术
空三加密软件根据多视影像的POS信息和光学信息,采用一定的算法与多视几何技术,快速准确地匹配各影像间的同名点,丰富的冗余影像可以纠正错误的匹配信息,从而保证模型精度。
(三)3D GIS基础理论
3D GIS 是一个综合性研究领域,其涉及技术多样,包括三维可视化、计算机图形、空间数据结构、虚拟现实和三维空间交互与分析等。不同于二维 GIS,3D GIS使用三维数据模型进行空间查询和建模分析。同时,3D GIS 具有直观的三维可视化效果,这使它成为地理信息系统中的一个重要分支,用于规划设计的3DGIS有以下几个关键技术。
1.三维可视化技术
三维可视化就是以三维立体的形式来表现数据的技术和方法,是一种需要在空间表达中通过特殊的数学模型进行成果直观表达的一种工具。现实世界通过倾斜摄影测量、手工建模等方式进行一系列变换处理,包括数据预处理、几何变换、选择光照模型和纹理映射,形成虚拟的数字化场景等,并通过空间数据库位置匹配挂接,将各行业的业务数据立体化地呈现出来,形成更具自然的效果和更为直观地感知的三维可视化场景,是数字孪生技术的关键技术。
2.3D GIS数据组织技术
三维地理信息系统(3D GIS)包含大量数据,主要有数字高程模型(DEM)、数字地形图(DLG)、倾斜摄影的实景三维模型和手工建模的规划仿真模型等。常见的矢量数据格式有 ESRI shapefile、MapInfo TAB,空间数据包括Geographic Database(Geodatabase)和Google Keyhole Markup Language(KML)等,空间数据库具有管理海量数据、图形和属性数据一体化存储、支持多用户并发访问、具备访问权限控制和数据安全机制等优点。
为提升三维地理信息系统的性能和显示效率,可以采用四叉树LOD(Level of Detail)技术分层处理影像和地形数据。此方法可建立一系列金字塔状数据集,并可通过分块的瓦片金字塔模型,减少数据访问量、提高輸入输出效率、进一步优化系统性能和数据显示效果。
3.3D GIS规划应用
3D GIS应用领域广泛,是当今主流数字孪生技术的基础底座。在规划领域中,3D GIS主要用于对当地的地形地貌、土地利用、空间布局以及建设部署等进行一定时期的规划设计,其中在规划应用中,建筑物和地形地貌是3D GIS的主要对象,其可以在规划设计中考虑建筑物和地形地貌,从而为城市和社会发展提供支持。3D GIS还可以用于其他领域,例如城市管理、环境监测和资源管理等。通过3D GIS系统,一方面可以把城市规划所需基础信息通过直观表现,并可利用日照分析、缓冲分析等众多空间分析算法模型,进行多维的定量分析,让规划设计人员能够从更宏观、更全面、更直观、更科学地了解和掌握城市各类信息;另一方面,还可将规划设计成果通过三维仿真和大数据分析等技术进行模拟推演,将未来城市的交通拥堵、洪水淹没、城市变迁等各类场景进行直观推演,来逐步修正规划设计成果,从而进一步提高规划的科学性、可操作性和前瞻性。
三、实景三维模型生产实践
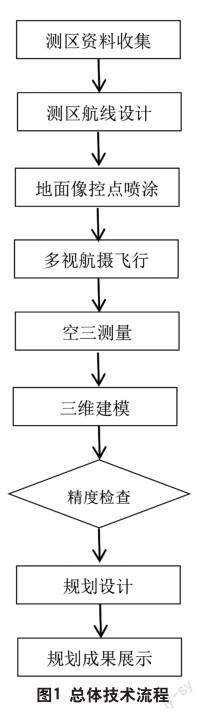
(一)总体技术流程
本研究主要研究了利用在江苏句容某高校开展基于实景三维模型的3D GIS规划试验,研究利用大疆Phantom 4 Pro无人机和ContextCapture软件,对实景进行了三维建模。同时,通过同步测量的检查点对成果精度进行检测,确保数据符合要求。经过后期数据切片发布处理,导入到3D GIS平台中,进行现状实景三维展示、规划分析等规划设计,以此来挖掘消费级无人机在规划设计领域更多应用场景。
基于实景三维的3 D GIS园林规划设计,主要涉及航飞阶段、像控阶段,以及数据处理阶段、系统规划展示各环节。主要技术流程如图1所示。
(二) 生产过程试验
1.实验设备介绍
大疆无人机以旋翼无人机为主,经济适用、操控灵活,工业化程度高,安全性好,但其动力有限、续航时间通常比较短,更加适用于小范围的航飞。本文根据园林规划范围相对较小、精细化要求高等特点,主要利用单位已采购的大疆精灵4Pro无人机搭载标配相机采集试验区3公分的多镜头倾斜影像。大疆精灵4Pro具有6个视觉传感器、主相机、GPS/GLONASS双模卫星定位系统、IMU和指南针双冗余传感器等模块装置,可以帮助无人机在安全飞行的同时获取高分辨图像、位置定位等重要信息,详见图2。其影像采集设备技术参数如表1所示。
2.测区航摄方案设计
航摄方案设计包括航飞高度和航线设计。采用DJI GS PRO航线规划软件,并参考天地图数据进行航线设计。在规划航线前,划定项目航飞范围并了解测区地貌,根据测区海拔高程和作业范围进行合理的任务规划,以提高作业效率并避免意外。
航线设计需要从建筑物高度、分布及测区形状等因素进行综合考虑,根据国家倾斜摄影测量技术标准,本试验区在航线设计上按照东西方向,航向80%、旁向70%重叠度进行航摄,并在摄区外多出一条航线,确保后续数据处理模型的完整度。
3. 地面像控點喷涂
地面像控点对于整个测区三维模型精度至关重要,可以按照测区范围,根据国家倾斜测量规范,按每条航线隔60-80米布设一个像控点,选符合摄影测量加密像控点位要求的明显地物作为地标点,在实地无法选定明显地物点、易造成内业判读困难的地区,应布设人工标志。人工标志需采用等腰直角三角模具,使用红蓝自喷油漆在航飞前提前做好标志。并采用RTKCORS模式可在航飞前或航飞后采用GPS仪器精确测定像控点三维坐标。如图4所示。
4.无人机倾斜航飞
无人机航拍最佳拍摄时间为9:00~15:00之间,此外,天气情况也是一个重要因素,在光线适中、能见度好的条件下,航拍影像质量更佳。本研究使用大疆的Pix4DCapture软件操纵无人机按照预先设计的航线自主飞行,获取多个相机镜头的倾斜影像,如图5所示。
5.园林规划区三维实景模型处理
园林规划的基础是三维实景模型,而ContextCapture是目前主流的倾斜三维模型数据处理方法。对不同时间段的航拍影像进行处理主要包括以下四步:(1)对所有航拍影像进行匀光匀色处理;(2)构建自由网模型,主要过程包括空三加密技术进行影像匹配、连接点粗差剔除等操作;(3)建立生成基于影像的超高密度点云,过程包括使用地面像控点、POS数据和无人机平台校验参数等进行整体区域网平差,解算多视影像外方位元素和加密点地面坐标;(4)基于点云数据构建TIN模型,并结合影像纹理生成高分辨率实景三维模型。



猜你喜欢
北京测绘(2023年1期)2023-02-23 13:25:10
汽车观察(2022年12期)2023-01-17 02:19:38
江苏安全生产(2022年5期)2022-06-16 07:51:04
建材发展导向(2022年2期)2022-03-08 01:43:50
计算机应用文摘·触控(2021年20期)2021-11-11 01:43:05
计算机应用文摘(2021年20期)2021-05-30 18:27:46
华人时刊(2021年23期)2021-03-08 09:27:24
中华建设(2019年2期)2019-08-01 05:57:46
现代园艺(2017年22期)2018-01-19 05:07:46
北方音乐(2017年4期)2017-05-04 03:40:09
