
基于LoRaWAN通信的升降机安全高度预警系统的设计
2023-09-13 12:04于大恒李婉婷
黑龙江科学 2023年16期
于大恒,王 春,李婉婷
(吉林烟草工业有限责任公司长春卷烟厂,长春130033)
0 引言
为实现安全生产,需对烟草动力车间现场环境及设备进行分析,特别是对登高作业,应增加审批环节,即对2 m以下、5 m以下及5 m以上登高作业进行审批及监控,加强硬件防护,实现车间登高作业的实时安全监控。随着物联网的发展,LoRa通信技术以其低功耗、抗干扰强、通信距离远、穿透性好等特点[1-3]被各行业大量应用。分析了各无线通信方案,选择LoRaWAN网络作为项目的网络层设计,可有效降低设备成本与功耗,扩大传输距离。根据LoRaWAN的技术特征,设计基于LoRaWAN网络的升降机安全高度预警系统,能够实时采集车间各个升降机的高度状态,远程实时查询升降机高度信息,当高度值到达该作业允许的极限高度后自动输出报警信息。该系统提供了新的登高作业安全管理方式,具有较高的应用价值。
1 总体设计
系统由LoRaWAN基站、终端检测节点、用户服务器及应用平台组成,终端检测节点以传感设备为主,进行数据采集,并将数据转发至LoRaWAN基站。LoRaWAN基站用于实现检测节点与用户服务器之间的数据传输,网关从检测节点收集LoRa数据帧,并将这些数据重传到用户服务器,用户服务器对系统产生的数据进行存储、管理及分析处理。应用平台采用浏览器对系统进行访问,获取终端检测节点的实时信息。正常情况下,处于活动状态的终端检测节点作为传感器部署在升降机指定位置,实时采集高度数据,终端检测节点将采集到的数据发送给基站,基站再将数据发送至服务器进行认证及数据帧去重。整体结构如图1所示。

图1 系统总体设计
2 硬件设计
系统的硬件部分主要包括终端检测节点与LoRaWAN基站两部分。终端检测节点主要由供电单元、激光测距传感器TF-Luna、低功耗MCU ATMEGA328P-MU及LoRaWAN模组RNDU490LAS组成。硬件框图如图2所示,其中MCU通过I2C连接传感器TF-Luna,通过UART串口连接LoRa模组。

图2 终端检测节点硬件框图
2.1 供电单元设计
激光测距传感器供电电压5 V,而MCU与LoRa模组需要的供电电压为3.3 V,故采用以两节14 500锂电池结合升压电路组成的电池包作为电源进行供电。设计了如图3所示的稳压电路,输出3.3 V,为MCU和LoRa模组供电,采用双向瞬态电压抑制器SMBJ18CA减小噪声干燥,防止浪涌损害电路,采用稳压器SPX3819M5-L-3-3用于电压转换,输出稳定的3.3 V电平。

图3 供电单元电路
2.2 控制单元及LoRaWAN通信单元设计
控制单元采用ATMEGA328P-MU,主要用于控制激光测距传感器获取高度信息,并连接控制LoRa模组向基站发送数据。ATMEGA328P-MU是一款高性能低功耗的8位AVR RISC微控制器,结合了32kb ISP闪存、1024B EEPROM、串行可编程USART等,广泛应用于物联网、自动化、仪器仪表等领域。
LoRaWAN节点模块采用锐米通讯的RNDU490LAS模组,该模组基于SEMTECH射频集成芯片SX1278的射频模块,是一款高性能的物联网无线收发器,具有功耗低、体积小、抗干扰能力强、传输距离远等特点,通过串口UART与控制单元连接。部分电路如图4所示。
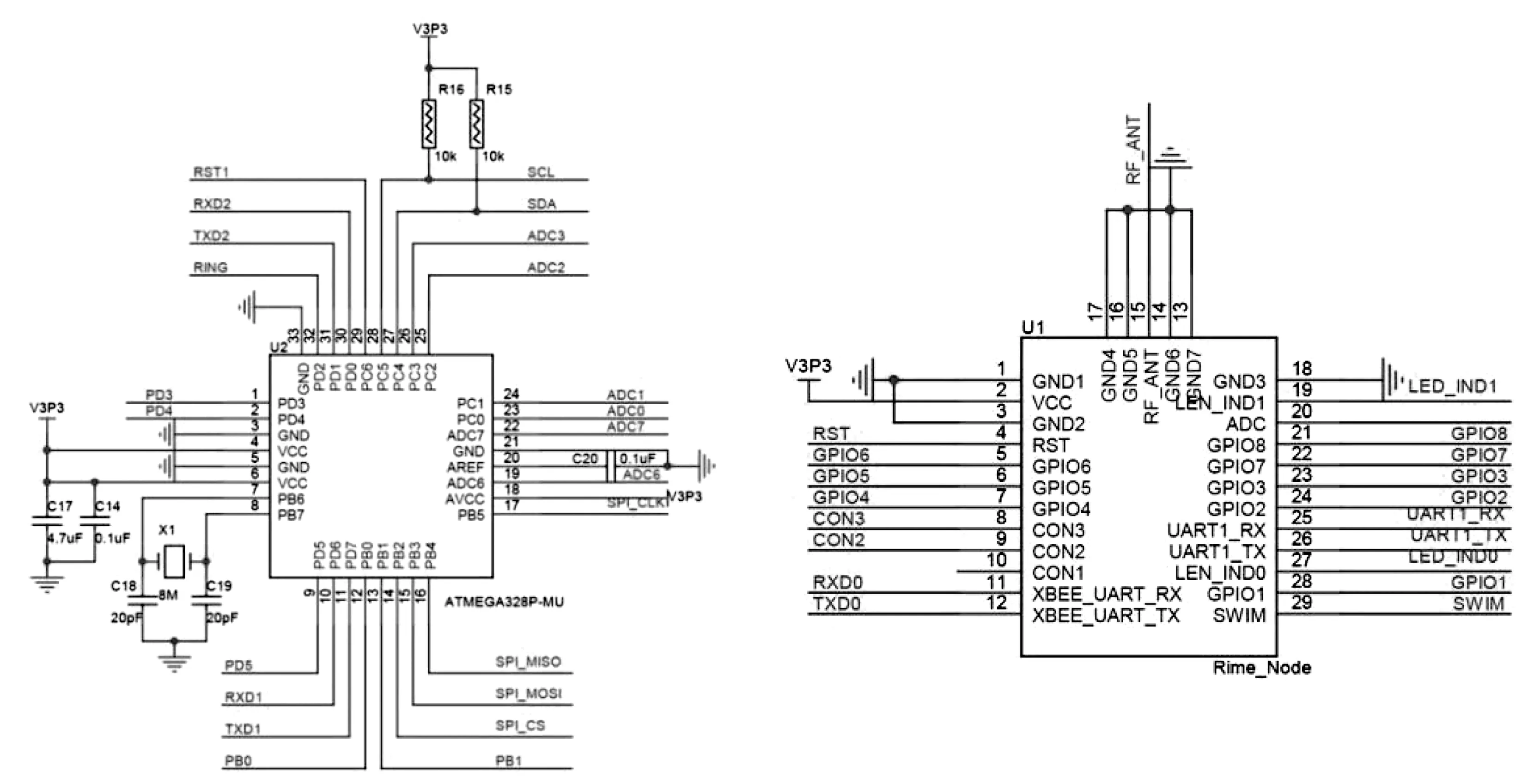
图4 控制单元及LoRaWAN通信单元设计
3 软件设计
为保证各层间正常通信,在软件部分对终端节点与应用服务部分进行有效设计。终端节点的软件设计可实现数据采集与上传,并尽可能降低功耗,提升续航。
LoRaWAN采用星形拓扑的网络架构,架构中的LoRaWAN网关是一个透明的连接点,负责连接终端设备与中央服务器。网关与服务器通过标准IP连接,而终端设备与网关采用单跳通信,所有的节点都为双向通信。为最大化终端设备电池寿命及整个网络容量,LoRaWAN 采用一种速率自适应(ADR)方案来控制数据传输速率及每一终端设备的射频输出[4]。
LoRaWAN节点模块的工作方式主要有3种,即A类、B类、C类。A类属于异步通信,当一个节点完成传输时,另外一个节点才会开始发起传输,避免数据碰撞的产生。A类模块只有需要时才会进行传输,大部分时间都是在休眠,所以A类节点模块主要应用于低功耗领域中。B类是在A类的基础上加上了时间同步功能,其功能非常复杂。C类是除了需要发送数据以外,其他时间都是处于接收状态,故C类功耗很高。
为了保证终端检测节点数据的上传,降低系统功耗,设置LoRaWAN节点模块工作在A类工作模式,开启休眠定时器。图5为终端检测节点的工作流程。
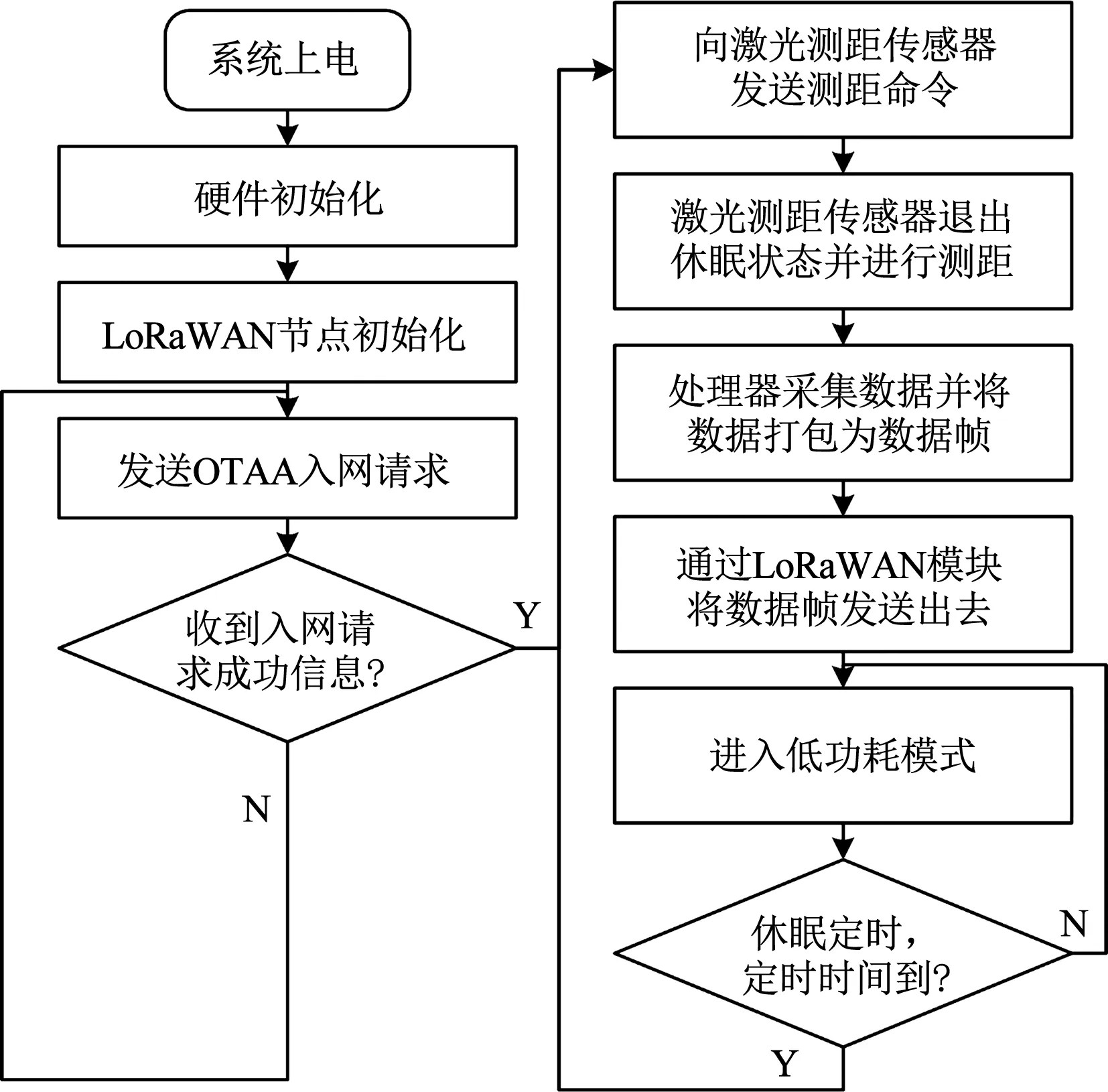
图5 LoRaWAN终端检测节点工作流程
具体流程包括:进行系统初始化,包括Arduino库、系统时钟、串口的初始化及TF-Luna的I2C接口初始化。LoRaWAN节点初始化,读取存储在内部Flash中的LoRaWAN参数信息(工作模式、频段、设备地址等)并初始化。通过无线射频发送OTAA入网请求,若基站收到请求,则返回入网成功信号,节点收到该信号则入网成功。入网成功后,MCU向激光测距传感器发送测距命令,激光测距传感器工作在低功耗模式,当收到命令时退出低功耗模式并进行3次测距,取数值相近的两个值的平均值作为最终测距值。MCU将测距值打包为LoRaWAN数据帧并通过LoRaWAN节点模块发送出去。所有模块重新进入低功耗模式,如果休眠定时时间到则退出低功耗模式,重新进入工作状态。
4 系统测试及分析
为了验证基于LoRaWAN网络的升降机安全高度预警系统设计的可行性与稳定性,对该系统进行实地信息传输实验。将一个LoRaWAN基站固定,多个终端检测节点置于车间各个位置,采用433 MHZ频段,各节点定时3S向基站发送一次测距数据并打印日志,基站通过有线网络将信息传输至管理服务器,根据管理服务器采集到的数据日志与终端检测节点的日志得到表1所示的车间内LoRaWAN网络数据传输测试结果。
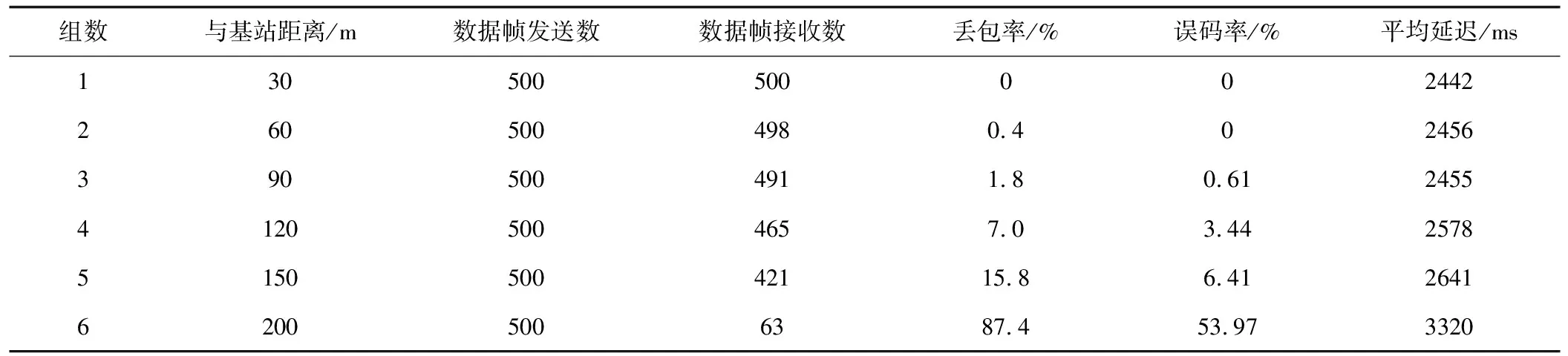
表1 车间内LoRaWAN网络数据传输测试结果
结果表明,随着通信传输距离的增加,传输数据的丢包率随之增加,通信延时的变化较小,120 m的丢包率达到7.0%,误码率达到3.44%,基本实现通信。200 m的丢包率达到87.4%,误码率达到53.97%,通信基本已经中断。查询资料发现,LoRa网络的有效通信距离可达1800 m[5-6],分析实验现场环境发现,车间内各种机械设备、管廊及墙体等容易对信号传输造成干扰,从而导致有效传输距离较短。实际使用的120 m传输半径已完全覆盖整个车间,单个基站即可满足项目需求。
5 结束语
设计的基于LoRaWAN网络的升降机安全高度预警系统,实现了LoRaWAN内终端检测节点、基站、网 络服务器及应用服务器之间的实时数据通信,满足了安全高度预警系统的功能及性能要求。从系统总体、硬件、软件设计进行研究,对系统功能进行测试分析。结果表明,该系统组网成本低,运行情况良好,实现了对车间升降机等登高作业工具高度数据的采集,满足车间对登高作业的安全监管要求。
猜你喜欢
成都信息工程大学学报(2021年1期)2021-07-22
电子制作(2019年12期)2019-07-16
中国特种设备安全(2019年4期)2019-05-20
好孩子画报(2019年10期)2019-01-10
中国特种设备安全(2018年10期)2018-12-18
电子制作(2018年8期)2018-06-26
电子测试(2017年11期)2017-12-15
凿岩机械气动工具(2016年3期)2016-03-01
液晶与显示(2014年3期)2014-02-28
电子设计工程(2014年17期)2014-02-27
