基于自注意力机制的雷达弱目标检测
2023-09-13 08:44齐美彬李亚斌项厚宏杨艳芳张学森
雷达科学与技术 2023年4期
齐美彬,李亚斌,项厚宏,杨艳芳,张学森
(1.合肥工业大学计算机与信息工程学院,安徽合肥 230009;2.中国电子科技集团公司第三十八研究所,安徽合肥 230088)
0 引 言
近年来,小型无人机等一系列低空慢速的小目标的研发实现了较快的发展,其数量也日益增多。为了更好地防止低空事故的发生,如何检测到这些弱目标,成为了近年来雷达领域的热点之一。但是在雷达目标检测中,弱目标因其散射截面积(Radar Cross Section, RCS)小,信噪比(Signal to Noise Ratio,SNR)低,给检测任务带来了巨大的挑战。
传统雷达弱目标的检测大多采用恒虚警方法(Constant False Alarm Rate, CFAR)[1-2]实现目标的定位。但是,由于其回波能量小于周围杂波与噪声,引发大量虚警、漏警现象。该方法的性能过分地依赖于门限值的设定,对目标检测结果造成一定的干扰。
由于卷积神经网络(Convolutional Neural Network,CNN)[3-4]具备良好的特征提取能力,其已经成功在计算机视觉、自然语言处理等多个领域取得了良好的性能。受到基于深度学习的视觉目标检测成果[5-8]的启发,在卷积神经网络应用于雷达目标检测方面,本文进行了初步探索。
文献[9]设计了一种基于CNN 的检测器实现雷达目标的检测。与传统CFAR 检测器不同,该方法通过使用窗口函数在距离-多普勒(Range-Doppler,RD)图上滑动,根据网络学习到的窗口内的雷达信号特征,来判断滑窗内的RD 图是否包含目标。该检测器采用两个卷积层和两个池化层去提取雷达信号特征。RadCNN[10]在文献[9]的基础上,加深了网络的卷积层至四层,并采用动量随机梯度下降法对网络进行训练。但是该类算法没有考虑RD 图中区域之间的相关性,无法应对低信噪比情况下的小目标的检测。同时,由于滑窗大小是固定的,此类方法容易发生小目标的漏检情况,目标的定位精度有待提高。
针对上述问题,本文采用U-Net网络[11-12],通过对RD 图中的雷达信号进行编码和解码操作,从而实现逐单元的目标检测。此外,本文在网络中引入了自注意力模块[13-14],因其RD 矩阵中目标点特殊的幅度信息和相位信息,网络根据数据驱动的方式建模输入信号中任意两个信号间的关系,来获取RD 矩阵中具有辨别性的深度语义特征从而提高网络的全局关系建模能力。该网络可以进行端到端的检测训练,且可以对任意尺寸的雷达回波数据进行编码,再将其解码恢复数据原来尺寸大小,因此可以灵活地应用于多种雷达信号检测场景中。
具体来说,本文根据信号预处理模块得到的距离-多普勒(RD)复数矩阵,扩展为实部、虚部、模值三个通道矩阵,并将其输入到深度学习网络框架中训练。对每个距离和速度单元都产生了一个预测,同时加入自注意力模块建模多个映射空间的雷达信号自注意力关系来获取更加丰富的特征信息,从而精确的定位目标点所在的距离单元和多普勒信息。
此外,本文进行了广泛的实验证明了所提出方法的有效性。实验的可视化效果证明了本文的方法是优于传统CFAR 检测的方法,检测性能在低信噪比场景下具有较强的鲁棒性,能够实现对弱目标的有效检测。
1 雷达信号检测框架
本文采用的方法总体分为3个模块:预处理模块、检测模块、结果模块,如图1所示。
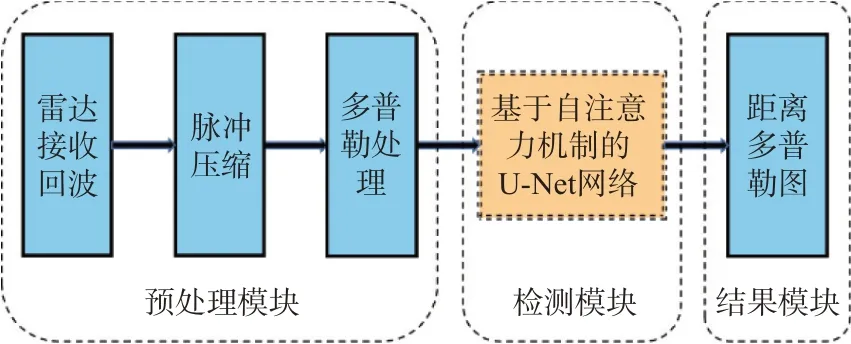
图1 信号检测框架
预处理模块:对于雷达信号本文采用线性调频(LFM)发射信号。在持续时间内,LFM信号的实部和虚部都为时间的振荡函数,信号频率随时间呈线性规律,其示意图如图2所示。

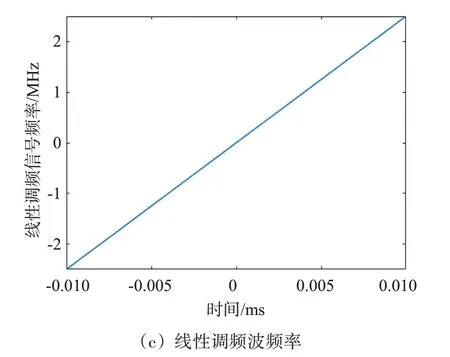
图2 线性调频波信号
根据RD 矩阵中目标点的幅度信息和相位信息,网络根据数据驱动的方式建模输入信号中任意两个信号间的关系,来获取RD 矩阵中具有辨别性的深度语义特征,从而提高网络的全局关系建模能力。
因此雷达回波数据的预处理通过脉冲压缩、多普勒处理之后,形成的雷达数据是一个距离-多普勒二维矩阵X。矩阵中每个像素都以复数i + jQ形式表示,包含实部和虚部。矩阵X的行代表距离信息,X的列代表速度信息。为了便于深度网络的处理,本文将单通道的矩阵X整合成三通道矩阵X。3 个通道分别由矩阵X的实数、虚数和绝对值构成。绝对值通道用于更好地让网络获取数据中的幅度信息,实数和虚数通道则是让网络来获取数据中的相位信息。
检测模块:由于自注意力机制模块可以获取输入信号中任意两个信号间的关系,不需要任何先验信息,是一种数据驱动的网络。因此,其可以由任务自身驱动,自动学习雷达信号间的关系,获得雷达的全局信息和长时依赖。而U-Net作为卷积神经网络,包含编码和解码模块,其通过局部先验获取雷达信号的局部关系,但其在长期依赖的建模能力尚且不足。综上,两个网络的结合可以形成功能性的互补。因此为了提高雷达信号的特征的辨别性,本文在U-Net 网络中加入自注意力模块,构建出基于自注意力机制的U-Net网络,利用自注意力机制模块提高U-Net 网络的全局关系建模能力,从而改善特征的辨别性来提高网络检测的鲁棒性。网络通过大量数据训练来提取目标的特征信息,从而获取目标所在位置来代替CFAR 检测。网络的具体实现过程见本文第2 节。
结果模块:多普勒处理后的RD 矩阵经过检测模块后,得到仅含目标的距离多普勒图。
2 检测网络
为了逐像素预测RD 图中是否包含目标,本文采用了具有编码和解码结构的U 型网络作为雷达检测网络的主体框架。在此主体网络的基础之上,本文引入了自注意力模块建模雷达信号间的关系。其中,U-Net 主体框架的实现过程在2.1 节中详细介绍,自注意力模块的网络结构在2.2 节中详细介绍。
2.1 基于U-Net的雷达目标检测网络
U-Net 网络广泛应用于计算机视觉中图像语义分割等领域,并获得了良好的效果。具体来说,采用U-Net 网络作为雷达目标检测网络的主要原因如下:1)U-Net 网络主要由编码和解码部分构成,编码结构可以使用任意的网络结构,解码结构使整体网络更加完善,能够提高网络对目标特征的拟合程度;2)该网络可采用端到端的方式,对雷达数据进行逐单元预测,输入与输出的尺寸相同,因此可以灵活地应用于多种雷达信号检测场景中;3)与全卷积网络(FCN)[15]相比,该网络有更长距离的残差连接,其可以保留雷达回波数据的多尺度原始数据信息,从而应对弱目标的尺寸变化,同时其能够有效地防止网络的梯度消失。
U-Net 网络主要包含两个部分:编码器和解码器。1)编码器,用于对数据进行特征提取。具体来说,编码器中包含4 个下采样模块,每个模块包含1 个最大池化层,2 个卷积层,其卷积核为3×3、步长为1、填充为1,从而得到不同尺度的特征信息j,j∈{2,3,4,5}。每个模块都进行卷积层提取特征,并使用最大池化层进行下采样。4个模块输出4个尺度的特征j,从而更好的应对目标的尺度变化。2)解码器,用于获取与输入数据尺寸相同的输出。解码部分包含了4 个上采样模块,融合特征信息i,i∈{6,7,8,9}。具体来说是对特征信息5 进行上采样模块处理。其利用线性插值法对每一层数据进行原尺寸的两倍填充,得到上采样特征信息6。同时对该上采样特征信息6 和其对应层下采样的特征信息4 进行残差连接,之后经过一个1×1 卷积层将通道数缩小至一半,恢复到和特征信息4一样的通道数,从而更好地保留原始雷达多尺度数据信息。相似地,经过4 次上采样操作,得到特征融合特征信息9,最终输出与输入相同尺度的目标位置预测得分图输出。图中每个值被视为输入RD 图中对应位置是否包含目标的概率,因此该输出可用于预测RD 图每个位置是否包含目标。这使得U-Net 在雷达目标检测过程中,效果优于普通CFAR 检测以及基于滑窗的深度检测器。U-Net 网络框架如图3所示。

图3 U-Net网络框架
2.2 自注意力模块
为了建模多个映射空间的雷达信号自注意力关系,本文采用了多头并行自注意力模块。其中,并行的多个自注意力单元用于在不同的映射空间建模雷达信号的自注意力关系。最后,自注意力模块整合多头注意力单元的结果,从而获取更加丰富的自注意力关系。
具体来说,每个注意力单元先采用点积的形式,计算Q和K的注意力。由于Q和K来自相同的输入,因此该注意力记为自注意力。该自注意力机制的优点在于,网络对信息长期依赖关系有着更强的捕捉能力。
而对于单个注意力单元其结果如图4所示,将输入X送进3 个卷积层,得到Q、K、V三个向量。用Q中每一个向量与K中每一个向量计算点积,即score=Q·KT。score中包含Q中每个元素和K中每个元素之间的注意力。将score与V进行点积,即对Q中每个元素,根据其与V中所有元素的注意力值对V中所有元素进行累加得到Z。
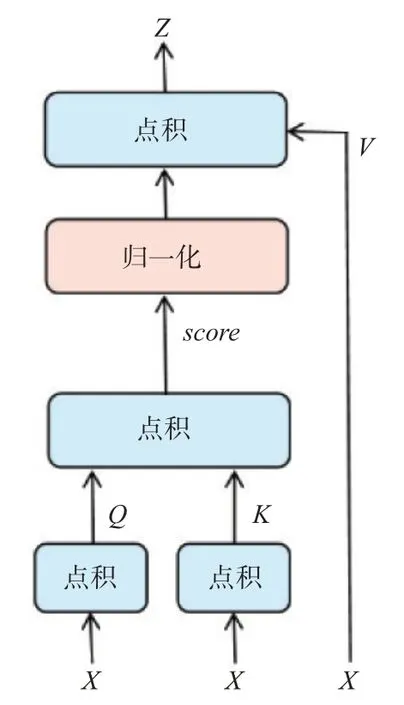
图4 单个注意力单元
最终,自注意力模块将h个并行的注意力单元所获得的结果进行了拼接,得到了网络的最终输出。其网络框架如图5所示。
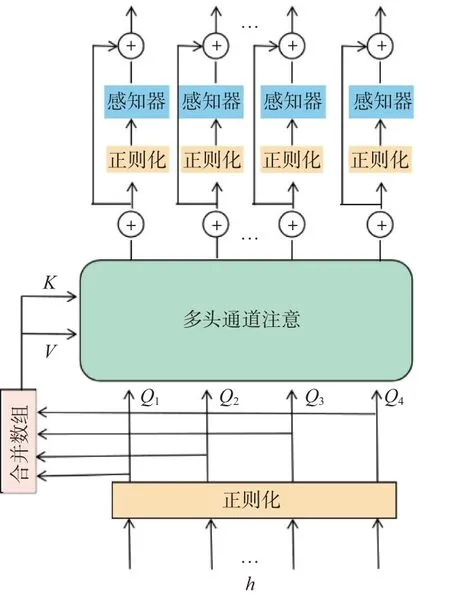
图5 自注意力模块
自注意力模块主要包括多头通道注意[16]、正则化(Layer Normalization,LN)和多层感知器(Multilayer Perceptron,MLP[17])。
加入自注意力模块的雷达信号检测网络VUNet 如图6 所示。VU-Net 网络在U-Net 网络基础上,将特征信息输入到自注意力模块中,得到输出特征信息i,i∈{6,7,8,9},再将其与对应的上采样数据进行拼接。其可以在多个尺度建模雷达信号的自注意力信息,捕捉更加丰富的雷达信号关系,从而提升雷达信号特征的辨别性,进而提升雷达信号检测的精度。

图6 VU-Net网络框架
3 实 验
3.1 数据集构建
本文生成的测试U-Net 网络和传统CFAR 检测所需要的雷达回波数据,由线性调频波(LFM)脉冲调制,其载波工作在3 GHz 载波上,脉冲宽度为50 μs,调频带宽为10 MHz,同时添加高斯白噪声。
为了更好地证实VU-Net 网络的优越性,本文数据产生与RadCNN 网络实验同等量级的数据量,训练4 000 组带有目标的距离多普勒矩阵,根据目标设定的距离和速度信息找到其所在的矩阵中位置,将其设置为标签1,其余没有目标的点设置为标签0。将数据送到网络里训练。
对于测试集本文产生2 000 组带有目标的距离多普勒矩阵,对于标签设置方法和训练集设置方法一致。验证集则是在信噪比为7 背景下仿真2 000 组带有目标的距离多普勒矩阵,用来消融实验。
同时对测试集的数据进行CFAR 检测。为验证U-Net网络的优越性,本文设置10组不同信噪比的噪声背景,将CFAR检测后的结果,与U-Net网络和VU-Net网络的检测结果进行对比。
3.2 评估指标
针对如何判定雷达目标预测的准度,本文用两个评估指标,分别是Precious(P)精确度:反映系统正确判定1 的样本中真正的1 的样本的比重;Recall(R)召回率:反映系统正确判定为1 的样本占总的1 的样本的比重。两个评估指标的计算公式如下:
式中,True Positive(TP)、False Negative(FN)作为评估标准。其中True Positive(TP)为类别为1 的样本被系统正确判定为类别1 的比例;False Negative(FN)为类别为1 的样本被系统误判定为类别0 的比例;False Positive(FP)表示类别为0 的样本被系统误判定为类别1的比例。
3.3 损失函数
本文采用的是Dice 损失函数[18-19]。Dice 用于计算两个样本的相似度。其计算公式为
Dice损失的计算公式如下:
当Y为预测数据,Z为真实标签时,最小化损失函数可以驱动网络去增加Y与Z的Dice值,从而增加Y与Z交集,使得预测数据更加接近于真实标签。
3.4 参数验证
因为多头在多个映射空间建模雷达信号间的深度关系,所以多头数h在本文提出的方法中是个至关重要的参数,通过在验证集上的实验确定了参数h的数值,实验结果如图7所示。
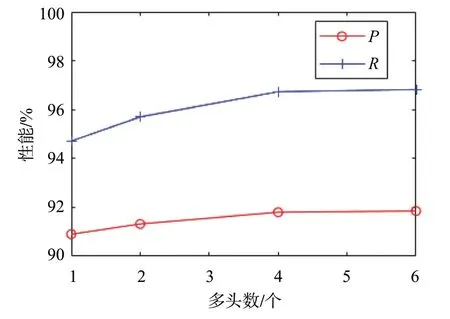
图7 参数h验证结果
由图7可以看出,随着h的增大,准确率P先是增大,而后减小,因为当多头数过大时,网络会学到冗余信息,从而使网络过拟合。召回率R在h等于4 后,随着h的增大,R的增长不明显。因此,综合准确率P与召回率R,选定多头数h等于4,可以获得相对较好的检测性能。所以在实验中,h均设置为4。
3.5 实验结果与分析
基于自注意力机制的U-Net 网络的输入与输出的尺寸相同。本文在图8 可视化了信噪比为10的噪声背景下多普勒处理后的雷达数据,以及网络的输出的目标位置预测得分图。

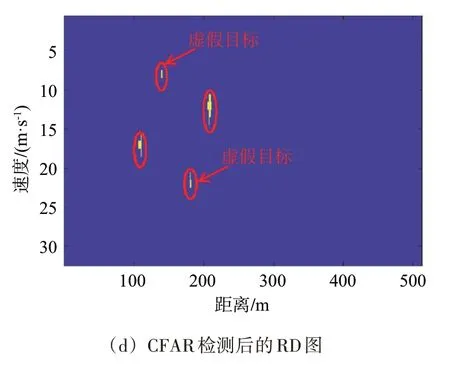
图8 不同网络检测后的可视化结果
从图8 可以看出,多普勒处理后的RD 数据经过VU-Net 网络,滤除噪声,将目标清晰地展现在RD 图上。网络能够精准地预测和定位目标的位置。而U-Net 网络因其没有添加自注意力机制,RD 数据特征学习不够深入,U-Net 网络只学习到矩阵信息的空间特征,会使目标点的附近单元的信息特征学习不准确,造成假目标现象,从而造成其单元延伸。而自注意力模块根据数据驱动的方式建模输入信号中任意两个信号间的关系,来获取RD 矩阵中具有辨别性的深度语义特征从而提高网络的全局关系建模能力,使其检测更加精确。因此U-Net 网络检测后的目标在其附近距离、多普勒单元会有延伸,致使目标检测不够精确。相比于U 型网络,CFAR 检测器检测出的RD 图,不仅在目标附近会有距离和多普勒单元上的延伸,同时还会有一些虚警现象。
对于实际场景中,本文采用海军航空大学信息融合研究所刘宁波等人对海探测的公开数据集[20]。通过Matlab 将其一个周期内的雷达回波数据进行读取,其距离-方位图如图9所示。

图9 实测海杂波数据
从图9 可以看出,海杂波分布极不均匀,且分布也处于未知状态,以第800 方位为例,读取回波信号,同时添加雷达回波数据,如图10所示。
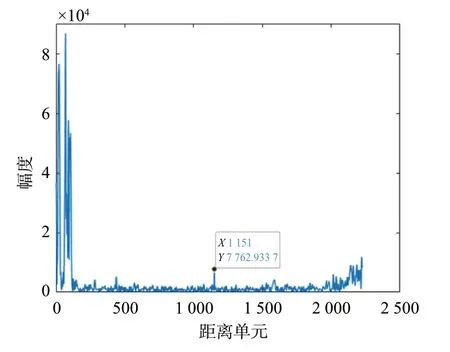
图10 添加目标后的海杂波数据
如图10 所示,目标信杂比设置为10 dB,虽然该处的目标有明显的增强,但是强杂波的干扰依然存在。对此,本文设置信杂比8 dB、10 dB、12 dB三组不同信杂比数据,将其送入网络,得到的杂波抑制实验结果如图11所示。
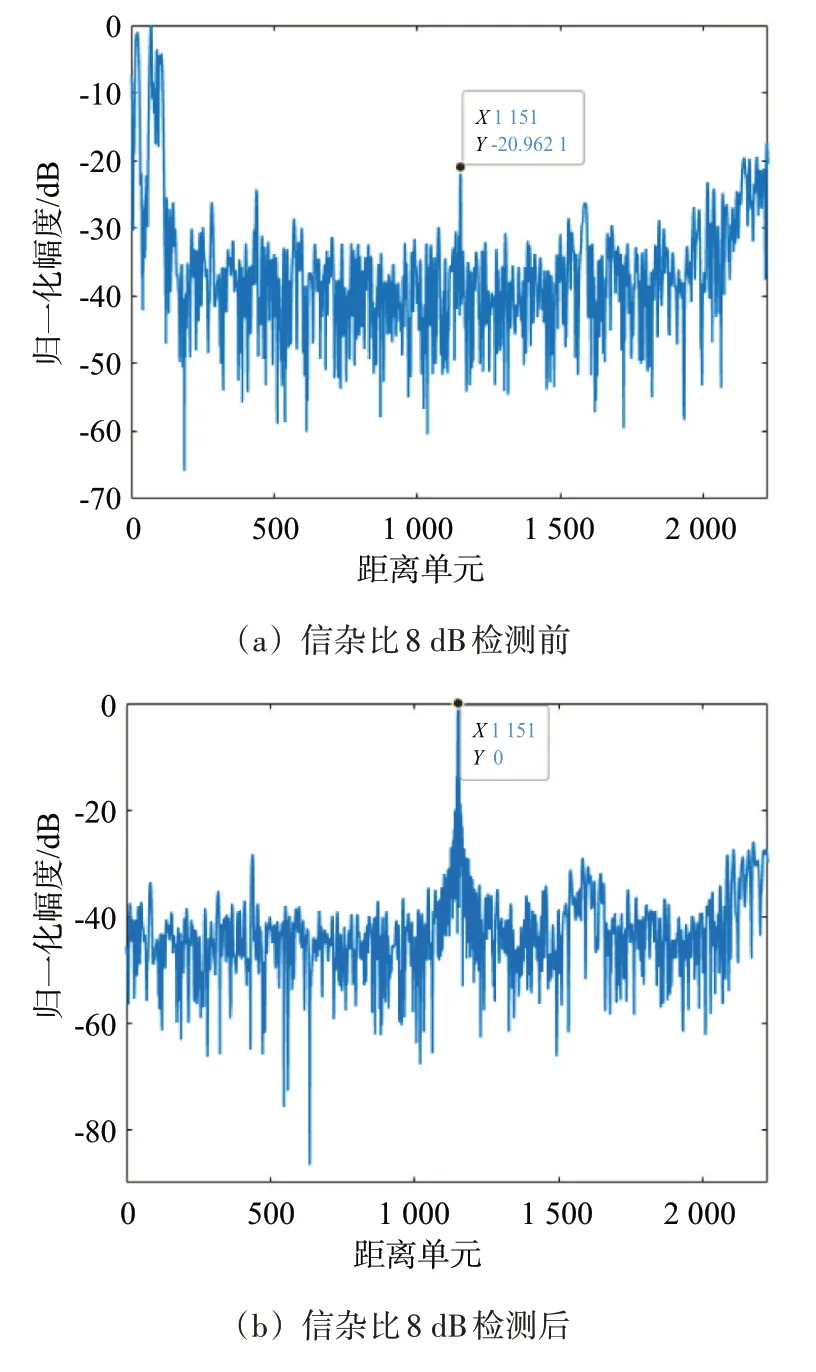
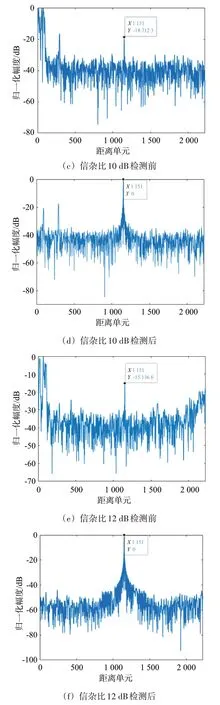
图11 杂波干扰下的检测效果
由图11可以看出,在强杂波背景下,该网络可以有效地抑制杂波,使得目标信号功率得到明显增强。同时为了进一步验证基于自注意力机制的U-Net网络的优越性,实验进行了10组不同信噪比背景下的目标检测,其准确率P和召回率R在不同网络和信噪比中的检测效果如图12和图13所示。
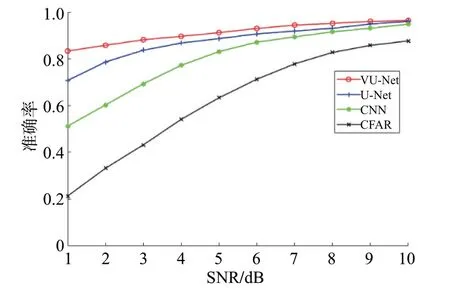
图12 4种方法在不同SNR下的准确率
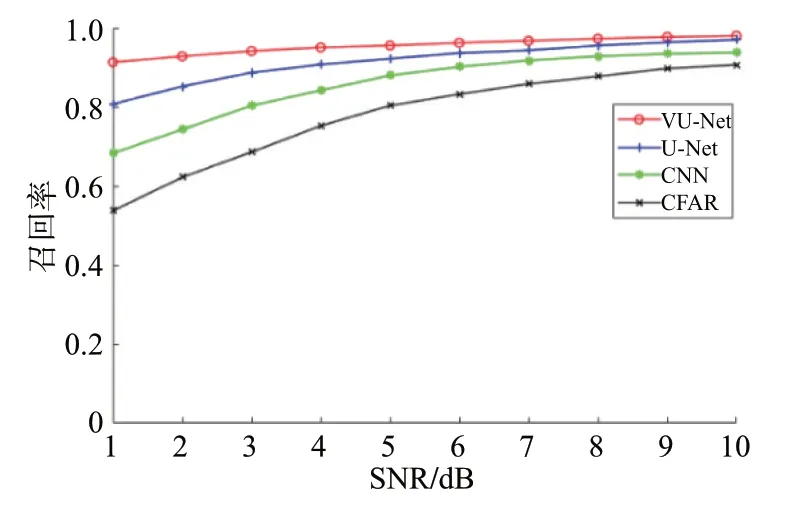
图13 4种方法在不同SNR下的召回率
图12、图13 所示U-Net 网络在检测概率上明显优于CNN 检测器和CFAR 检测器,特别是在回波信号干扰能量大的背景下,用传统CFAR 检测会出现大量的漏警现象,导致检测概率会比较低,同时CNN 网络虽然一定程度上改善了CFAR 检测器检测目标和噪声所带来的巨大误差,但是因其网络没有考虑区域间的相关性,网络捕捉回波信息的不足,其检测概率也略低。
同时VU-Net在信噪比1到5的背景下,其准确度的衰减程度要低于CFAR 检测,VU-Net 网络检测不会因信噪比越来越低从而导致网络的检测准确度迅速下降。证明了VU-Net网络对雷达回波数据有着良好的鲁棒性。而U-Net 的准确度在信噪比为1 到10 的背景下要低于VU-Net。因此证明了VU-Net网络在对信息长期依赖关系有着更强的捕捉能力,同时自注意力机制模块提高U-Net 的全局关系建模能力,从而改善特征的辨别性,增强其鲁棒性。证明了基于自注意力机制的U-Net 网络在弱目标的雷达检测能力的优越性。
4 结束语
对于雷达目标检测,传统方法是用各种CFAR来进行目标检测,但是对于弱目标的雷达检测,其信噪比低,目标散射截面积小是其检测的难点。然而通过CFAR 模式判断目标是否存在,不能很好地满足弱目标的检测。对此本文采用U-Net 网络来代替传统恒虚警检测,通过分别在信噪比为1到10 的低信噪比的背景下来进行实验,其结果表明U-Net 网络相对于CFAR 检测效果有着较好的提升,同时在U-Net 网络中加上自注意力机制后的检测性能要高于U-Net 网络。本文所提的网络模型,其后续可在复杂环境背景下进行深入研究,来进一步提高网络模型的泛化能力和鲁棒性。
猜你喜欢
小雪花·成长指南(2022年1期)2022-04-09
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
传媒评论(2017年3期)2017-06-13
第二课堂(课外活动版)(2016年2期)2016-10-21
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07