含时变轮胎侧偏刚度的车辆质心侧偏角鲁棒估计
2023-09-13 12:51陈建锋葛新元汤传业叶贻财
重庆理工大学学报(自然科学) 2023年8期
陈建锋,吴 强,葛新元,汤传业,叶贻财
(1.江苏大学 汽车工程研究院, 江苏 镇江 212013;2.常州工学院 电气信息工程学院, 江苏 常州 213032)
0 引言
车辆质心侧偏角是车辆主动安全系统高效工作的重要前提[1-2]。由于成本原因,此类信息难以在量产车上直接测得[3]。基于普通车载传感器的软测量方法是一类有效的替代方案[4]。其中,基于运动学模型和动力学模型的软测量方案最具有代表性[5]。
相比较而言,基于动力学模型的软测量方案对传感器信号准确程度的依赖性较弱[6]。但是,其对车辆动力学模型的精度要高,特别是轮胎力信息[7]。在众多轮胎模型中,线性轮胎模型具有结构简单、易于在嵌入式系统上实现等优点。但是,其在非线性区域存在较为严重的失真。有研究人员提出了一种轮胎侧偏刚度自适应变化的模型,利用系统的反馈信息实时对轮胎侧偏刚度进行修正[5,8]。但是,此类方案显著增加了计算量,同时对反馈信号要求较高。另一方面,将基于运动学模型和动力学模型的软测量方案进行融合,可以在一定程度上解决上述轮胎侧偏刚度的表征难题。Cheli[9]和Villano等[10]提出了一类加权融合方案,可以根据车载传感器信号的变化情况有效规避非线性的动力学问题。但是,此类方案结构复杂,且未涉及传感器累积误差的消除。
在车辆质心侧偏角的估计过程中,横摆率和侧向加速度等传感器量测信号必不可少。惯性测量单元(inertial measurement unit,IMU)是提供上述信息的重要传感器。受成本约束,车载的低成本IMU中常存在量测信号与真实信号不匹配现象(即量测突变或信息丢包)[11],进而降低车辆质心侧偏角的估计效果。Chang等[12]提出一种考虑传感器信号不匹配的估计方法,重点分析信号不匹配情况下的稳定性。Villano等[10]设计了一种互为输入、输出的双无迹卡尔曼估计方案,以获取相对可靠的信号输入。Chen等[13]提出一种基于平滑变结构滤波的车辆运动状态鲁棒估计方案,以削弱异常信号带来的影响。
总体而言,目前很少有研究人员考虑从量测信号预处理的角度研究车辆质心侧偏角的鲁棒估计问题。此外,在现有的基于动力学的质心侧偏角估计方法中,鲜有考虑估计精度与计算负担之间的合理取舍。因此,有必要从上述角度出发,研究基于普通车载传感器的车辆质心侧偏角高精度鲁棒估计方法。
1 问题的提出
现有的车辆质心侧偏角估计方案中,需要设计附加的功能模块对非线性区域的轮胎侧偏刚度进行修正,存在结构复杂、计算量大的缺点。此外,车载传感器的量测信号中的突变也会影响车辆质心侧偏角的估计效果。
本文中提出一种含时变轮胎侧偏刚度的车辆质心侧偏角鲁棒估计方法,整体结构如图1所示。首先,对车载传感器输出的横摆率和侧向加速度信号进行可靠性判别。其次,在线性轮胎模型的基础上,给出一种基于侧向加速度信号的轮胎侧偏刚度实时计算方法,同时利用未知输入观测器(unknow input observer,UIO)获取驱动轮的纵向力。最后,采用容积卡尔曼滤波器(cubature Kalman filter,CKF)实现车辆质心侧偏角的鲁棒估计。
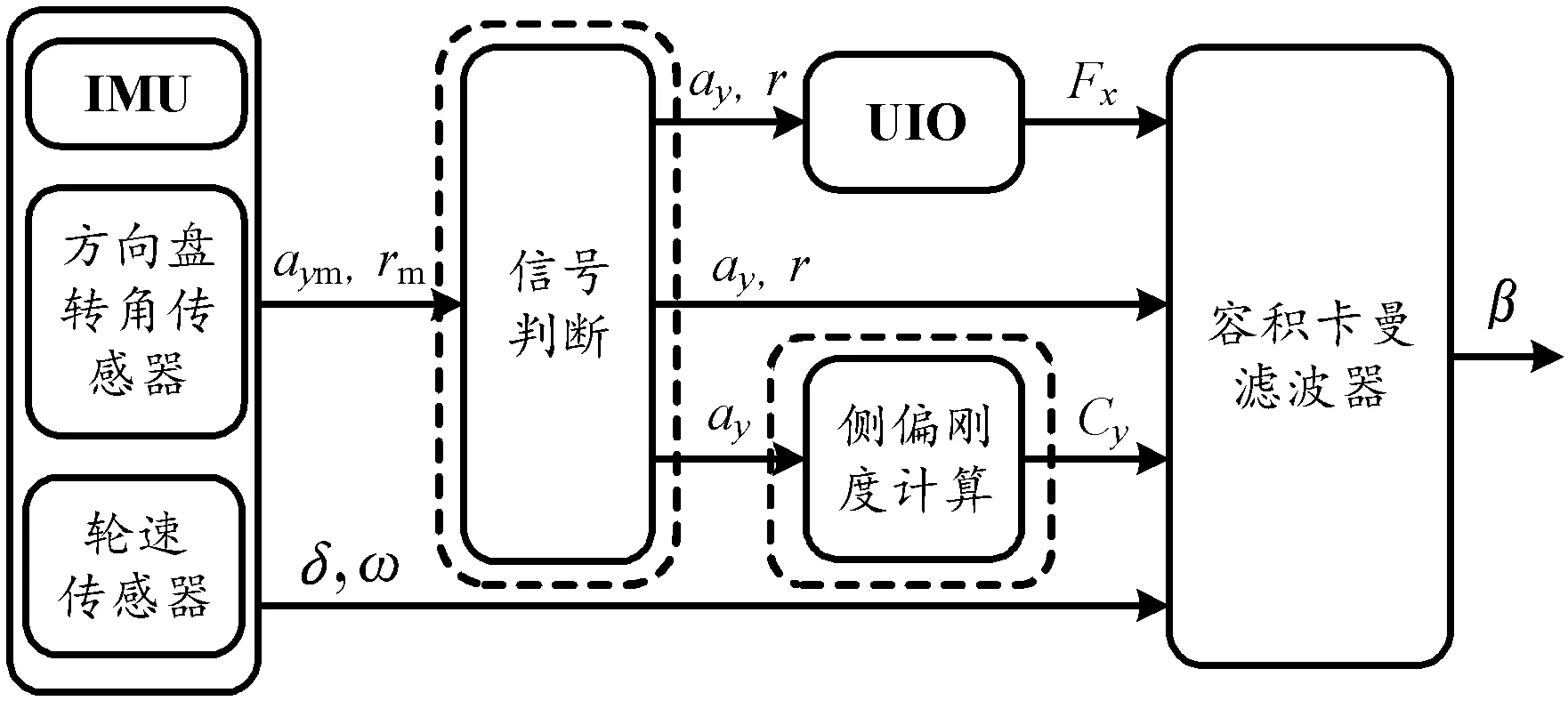
图1 整体结构示意图
2 不可靠量测信号的滤除
车载惯性器件为低成本器件,常存在量测信号不可靠问题。考虑到方向盘转角信号与横摆率和侧向加速度信号紧密相关,即方向盘的转动会使横摆率和侧向加速度量测信号发生改变(典型的结果如图2所示,其中k1、k2分别为对应的缩放系数,具体可通过下文的“尺度变换”得到)。针对横摆率和侧向加速度量测信号,提出如下的基于方向盘转角信号的不可靠量测信号滤除方法。
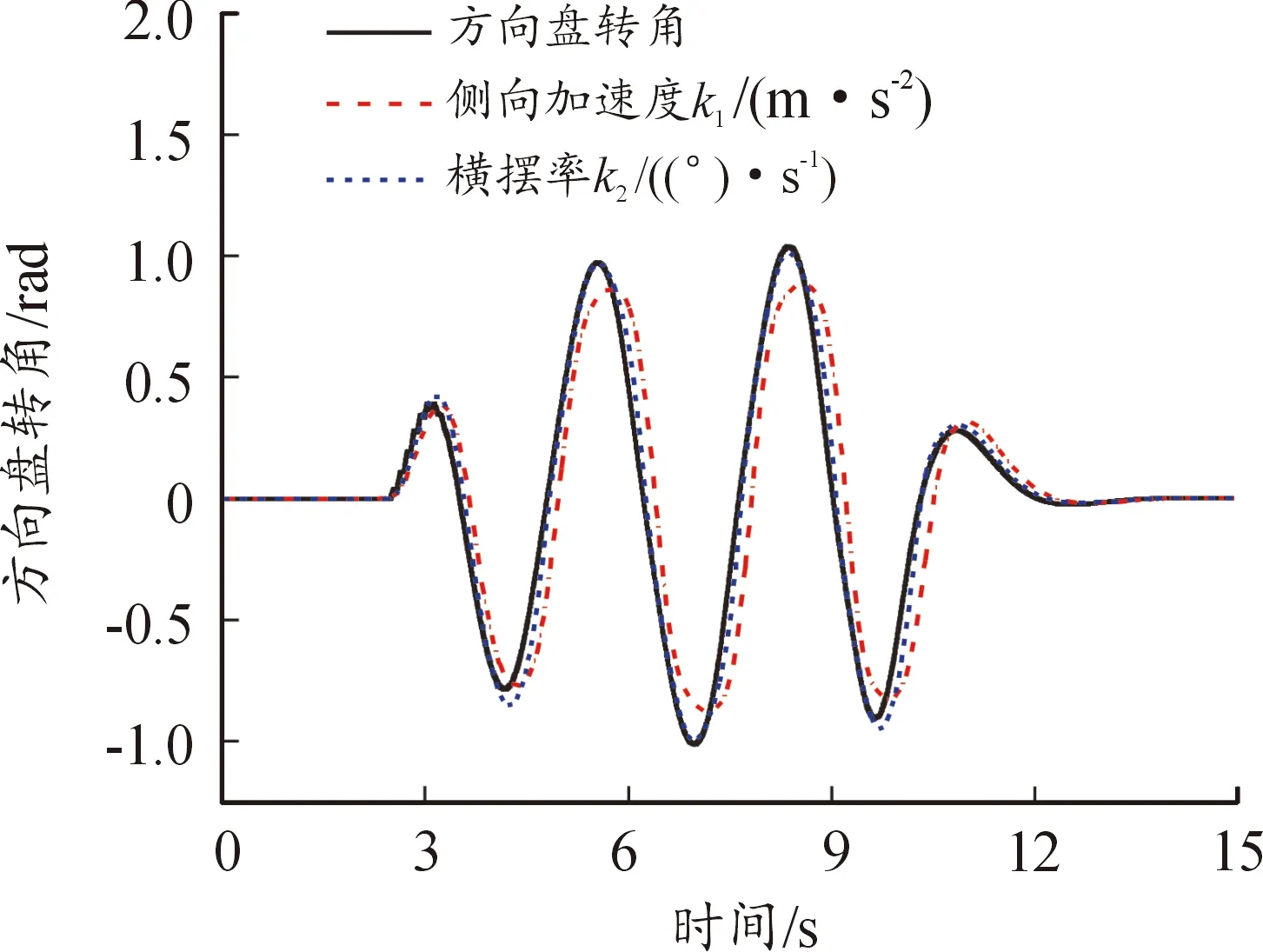
图2 典型车载传感器信号
在车辆正常行驶时,有如下关系[14]:

(1)
式中:l为车辆轴距,K为稳定性因数。车辆转向大多具有轻微转向不足的特性,为了减少计算量,此处取K=0.01 s2/m2。
车载惯性器件量测信号中噪声较大[15-16](见表1),小幅的突变难以检测。可以方向盘转角的量测信号为基准,经式(1)所示的“尺度变换”后再分别进行一定幅度的上下偏移,得到横摆率和侧向加速度量测信号的可信区间。将处于该区间内的信号视为可靠信号,反之视为不可靠信号。对不可靠信号,用上一时刻的值进行替代。

表1 车载惯性传感器典型配置
考虑到车载惯性器件的量测精度,对横摆率信号,其可信区间偏移量取0.25。侧向加速度的可信区间由方向盘转角δ信号经过“尺度变换”得到,具体方法与此类似。
3 时变轮胎侧偏刚度的计算
传统的线性轮胎模型在非线性区域无法准确刻画轮胎力特性。考虑含时变轮胎侧偏刚度的轮胎模型:
Fyf(t)=Cyf(t)αf
Fyr(t)=Cyr(t)αr
(2)

轮胎侧偏刚度受轮胎气压、垂向载荷、轮胎-路面附着系数μ以及轮胎侧偏角等影响[17],其中垂向载荷和轮胎侧偏角的影响最为显著。通常认为轮胎侧偏刚度与垂向载荷之间存在如下关系[18]:

(3)
式中:Fz(t)为t时刻的垂向载荷,a0、a1、a2为系数。但是,车辆转弯时垂向载荷的前后转移较小。对于单轨车辆模型,常认为前、后轴垂向载荷的波动较小(典型结果见图3)。考虑到车轮的垂向力难以直接获取,式(3)所示的方案不易推广使用。

图3 典型机动过程中的前、后轴垂向载荷
进一步,考虑轮胎侧偏角的影响。如图4所示,在非线性区域,轮胎侧向力随轮胎侧偏角的增大而显著降低,当轮胎侧偏角超出特定的范围后,轮胎侧向力趋于饱和。

图4 特定载荷下某轮胎侧向力与轮胎侧偏角的关系
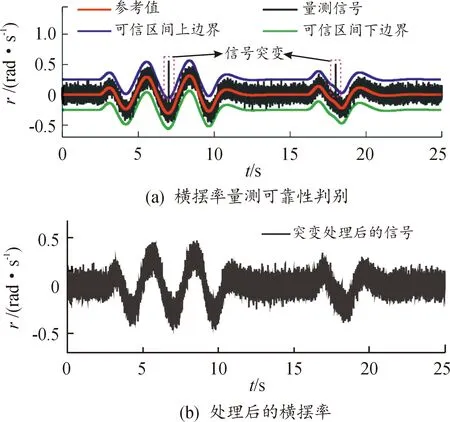
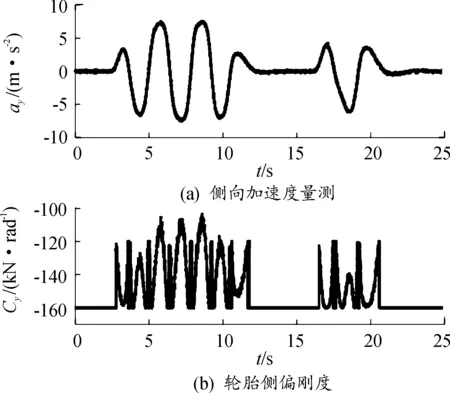
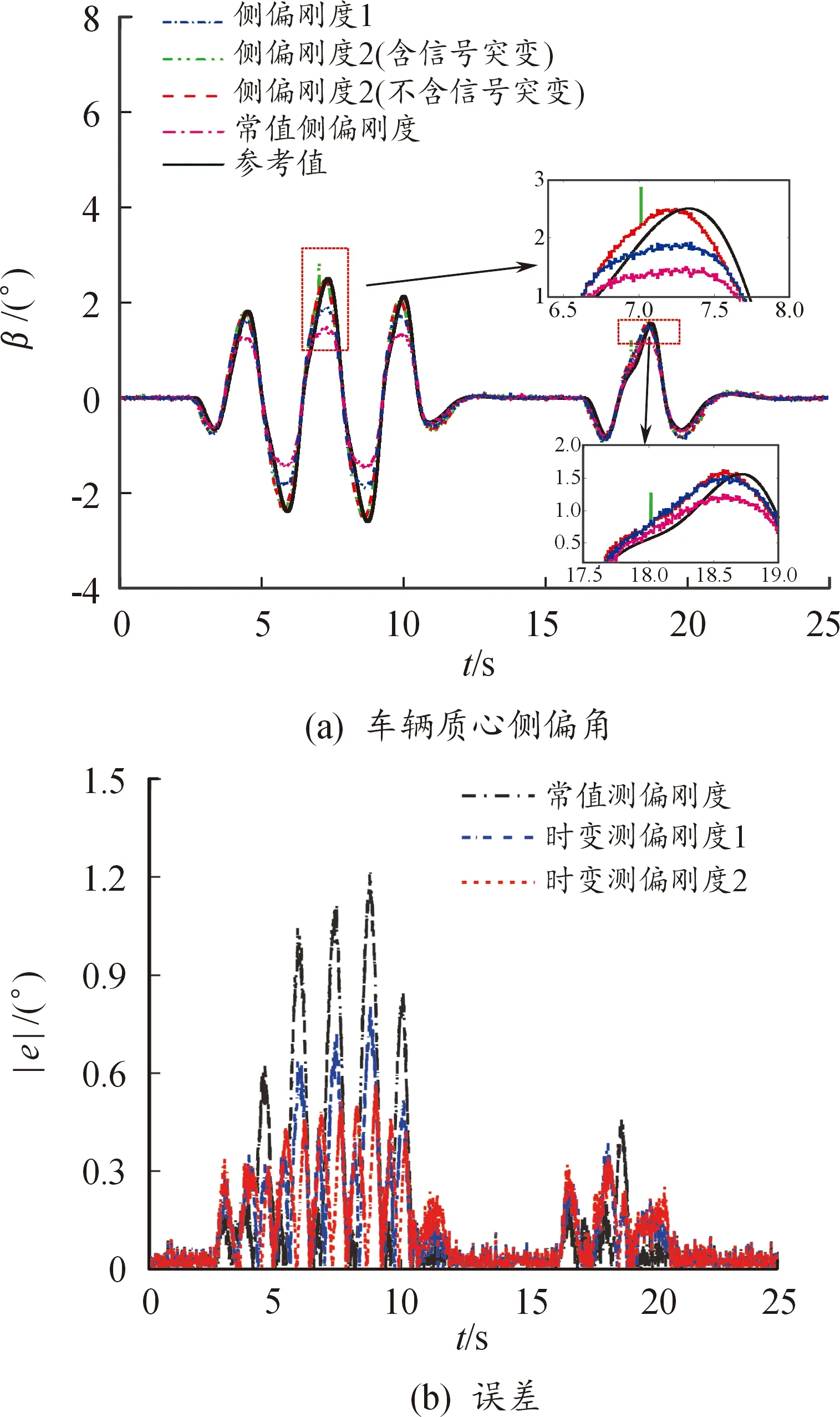
注意到轮胎侧偏角难以准确获取,可以考虑轮胎侧偏角与侧向加速度之间的近似对应关系(见图5,其中k为缩放系数),利用车载传感器输出的侧向加速度信号代替轮胎侧偏角:线性区域内(ay(t) 图5 典型机动过程中侧向加速度与前、后轴轮胎侧偏角之间的近似对应关系 (4) 式中:Cs为线性区域内的常值轮胎侧偏刚度,c1、c2为系数,ay(t)为实时侧向加速度,ayth为非线性区域起点处的侧向加速度。上述参数可以根据轮胎动力学特性、通过多次试验确定。 对图6所示的单轨车辆模型,仅考虑侧向及横摆运动,有: 图6 单轨车辆模型示意图 (5) 单个车轮(如图7所示)的动态平衡方程可表示为: 图7 车轮的动态平衡示意图 (6) 另一方面,车辆行驶时常受不平路面等外界干扰。系统存在扰动时,采用UIO可使观测误差趋近于零[19],相关的UIO结构可表示为: (7) 式中:χi为中间变量,ρi为正常数(其值越大,UIO的响应越快、误差也越小)。 对上述系统进行离散化并构造量测方程,有: xk+1=f(xk,uk)+wk zk=h(xk,uk)+vk (8) 式中:系统状态向量xk+1=[βk+1rk+1]T,量测向量zk=[ay,krk]T,f( )和h( )分别为过程函数与量测函数,wk和vk分别为k时刻的过程噪声和量测噪声。 车辆系统具有强非线性特性,CKF基于三阶球面径向容积准则,使用一组容积点来逼近具有附加高斯噪声的非线性系统的状态均值和协方差,可有效处理强非线性问题[20],具体过程如下: 1) 初始化 (9) 2) 时间更新 ① 选取容积点: (10) ② 容积点传播: (11) ③ 一步预测的估计与方差: (12) 3) 量测更新 (13) 容积点经过量测函数传播得: (14) 量测过程中一步预测、预测方差及协方差分别为: (15) (16) (17) k+1时刻的状态估计及估计方差为: (18) 利用CarSim中的C级车对所提出的方法进行验证,相关的结构参数见表2。具体工况由方向盘正弦输入和双移线机动组成,车速110 km/h,μ=0.85,横摆率信号在7 s和18 s处分别存在0.8 rad/s和0.6 rad/s的突变。 表2 车辆的结构参数 图8(a)中给出了利用可靠性判别方法得到的横摆率上、下边界,图8(b)为滤除突变后的横摆率信号。显然,突变信号已被滤除并被有效替换。 图8 横摆率信号 图9为验证过程中的侧向加速度信号和轮胎侧偏刚度曲线。随着侧向加速度的变化,轮胎侧偏刚度的数值出现相应的增加或减小,符合轮胎的动力学特性。图10为车辆质心侧偏角的估计结果。 图9 侧向加速度信号和轮胎侧偏刚度曲线 图10 车辆质心侧偏角的估计结果 图10(a)中的侧偏刚度1为根据文献[18]得到的结果,侧偏刚度2为根据本文所提出的方案得到的结果。为便于比较,同时考虑了轮胎侧偏刚度为常值以及不存在传感器信号突变的情况。可以发现,在非线性区域,根据本文中提出的方法得到的车辆质心侧偏角存在一定的相位超前(双移线部分更为明显)。在方向盘正弦输入部分,本文中提出的方法相对于基于垂向力的方案具有明显的精度优势;在后续的双移线部分,2种方法的估计误差近似。但是,根据本文中提出的方法得到的质心侧偏角与参考曲线在形状上更为一致,且差距来源于相位的超前(见图10(a)的子图部分)。总体而言,利用本文中提出的方法可以得到鲁棒性更好的估计结果。 需要注意的是,相位的超前一般利于系统的实时控制,相关的改进方案值得进行深入研究。 复杂的行驶工况下,利用本文中提出的车辆质心侧偏角估计方案可以比较准确地获取时变的轮胎侧偏刚度信息;对于较大幅度的传感器异常量测,也可以有效识别并进行合理替换,最终得到鲁棒的车辆质心侧偏角估计结果。 此外,车辆质心侧偏角的估计结果具有一定的相位超前,可以考虑对方案进行改进,以进一步提升其性能。

4 基于CKF的车辆质心侧偏角估计















5 数值验证

6 结论
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年4期)2021-11-24
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
物理教学探讨(2018年1期)2018-02-13
光学精密工程(2016年3期)2016-11-07
通信电源技术(2016年1期)2016-04-16
西北工业大学学报(2015年1期)2016-01-19
航天器工程(2014年5期)2014-03-11