
基于博弈映射学习的多传感源信息融合三相电机智能故障诊断方法
2023-09-13 03:23任翔宇贾利民程晓卿
电工技术学报 2023年17期
任翔宇 秦 勇 王 彪 贾利民 程晓卿
基于博弈映射学习的多传感源信息融合三相电机智能故障诊断方法
任翔宇1,2秦 勇1,2王 彪1,2贾利民1,2程晓卿1,2
(1. 轨道交通控制与安全国家重点实验室(北京交通大学) 北京 100044 2. 北京交通大学交通运输学院 北京 100044)
利用多传感数据能够全面地诊断三相电机的各类机械或电气故障,然而现有的智能诊断方法缺乏有效的关键故障信息挖掘与跨传感源特征聚合学习机制,导致其诊断效果不佳。针对以上问题,该文提出一种基于博弈映射学习的多传感源信息融合三相电机智能故障诊断方法。首先,使用多个并行的自学习特征映射网络从各传感数据中自动地提取故障特征;然后,构建传感源鉴别器并使其与自学习特征映射网络形成博弈关系,精炼故障特征并引导其跨传感源分类聚合;之后,将样本差异度量损失函数引入到优化目标中,以确保各类故障特征之间的空间可分性;最后,利用故障模式识别器进行多传感故障特征融合诊断。实验结果表明,该方法能够基于振动、电流、声等多传感数据准确地诊断三相电机轴承故障、转子故障及电气故障,且诊断性能优于现有方法。
三相电机 智能故障诊断 多传感源信息融合 对抗学习 信息度量
0 引言
作为旋转机械的重要动力源,三相电机广泛应用于轨道交通、石油化工、汽车制造、煤炭冶金等工业生产与社会生活的各个领域[1]。三相电机的性能状态往往直接影响生产效率与产品质量,一旦发生故障,轻则导致生产工作停顿造成经济损失,重则引发安全事故导致人员伤亡。因此,利用监测传感器获取的振动、电流、温度等信号对三相电机故障进行及时诊断并采取相应的维护措施,对保障其安全、可靠、高效运行具有重要的现实意义。
随着工业互联网的快速发展与普及应用,三相电机的监测数据规模呈指数级增长,监测传感器的类型也越来越多。丰富的监测数据为基于人工智能算法的智能故障诊断提供了应用基础,涌现出大量研究成果[2-3]。现有的三相电机智能故障诊断方法主要分为两类:基于浅层模型的方法和基于深度模型的方法[4]。浅层模型只包含一层隐层节点或没有隐层节点,如支持向量机、梯度提升树、自组织神经网络等。这些模型的结构相对比较简单,易于迭代训练,但其表征学习能力弱。因此,基于浅层模型的方法通常需要先借助信号处理等技术设计故障特征提取算法,然后再以这些故障特征为输入训练浅层模型,进而识别三相电机的健康状态。例如,文献[5]设计了广义精细复合多尺度样本熵算法从振动信号中提取故障特征,然后利用改进支持向量机诊断三相电机的轴承故障;文献[6]采用离散小波变换对三相电机振动信号进行去噪,使用马氏距离作为判断准则筛选故障特征并输入至支持向量机中进行故障分类;文献[7]基于小波包分解算法计算振动信号在各频带内的能量,并将其作为输入训练梯度决策提升树诊断模型;文献[8]首先利用自组织映射网络提取故障特征,然后使用离散隐马尔可夫模型对三相电机轴承故障进行诊断;文献[9]提出了基于骨干微粒群算法和支持向量机的电机转子断条故障诊断方法。深度模型由多个隐层堆叠而成,其结构复杂但具有更强的表征学习能力,能够从海量监测数据中挖掘出更多有价值的故障信息与知识。常用的深度模型包括深度自编码网络、深度置信网络、卷积神经网络等。例如,文献[10]提出了一种基于堆叠自编码器的迁移诊断方法,实现了不同应用场景下的三相电机轴承故障诊断;文献[11]将主成分分析、粒子群优化和深度置信网络相结合,建立了计算耗时更小、诊断精度更高的三相电机智能故障诊断模型;文献[12]直接以原始的红外图像作为输入,利用改进的卷积神经网络有效地识别了转子-轴承系统故障。相比于浅层模型,具有更强表征学习能力的深度模型更适合处理大数据问题[13-15],因而近年来吸引了学者们越来越多的关注。
三相电机的常发故障包括机械类故障(如轴承故障、转子不平衡、笼条断裂等)和电气类故障(如匝间短路、电压不平衡、缺相等)[16-17]。由于不同类型的故障具有不同的物理表征,仅使用单一类型的监测传感器难以全面有效地捕捉三相电机的各类故障特征,进而影响深度智能模型的诊断能力及识别精度[18]。因此,以多传感数据为输入的多源信息融合智能诊断方法成为了学者们的研究重点。根据信息融合的层次不同,现有的多传感源信息融合三相电机智能故障诊断方法分为数据级融合诊断方法、特征级融合诊断方法和决策级融合诊断方法[19]。数据级融合直接对原始的多传感数据进行融合,例如文献[20]提出了三种数据级融合方法,对振动、转速和载荷数据进行融合并从物理角度解释了各种融合方法的意义。决策级融合首先利用每个传感器数据进行单独诊断,然后对所有诊断结果进行融合决策,是现有研究中使用最为广泛的融合方式。例如,文献[21]将电机三相电流信号分别输入到不同的卷积神经网络中进行自动特征提取与分类,然后在决策层中使用监督学习算法进行融合故障诊断;文献[22]使用卷积神经网络分别从振动和电流信号中提取特征,然后使用Softmax分类器进行预分类,最后利用D-S证据理论对所有预分类结果进行综合决策诊断。特征级融合是在输入数据与决策输出中间进行信息融合,即首先从各传感数据中提取故障特征,然后将这些特征融合后再输入分类器中进行故障诊断。例如,文献[19]使用长短期记忆网络和卷积神经网络构建了多尺度融合网络,该网络能够从振动和电流信号中提取故障特征并进行融合,而后将这些融合特征输入到Softmax分类器中进行故障分类;文献[23]首先使用改进稀疏滤波器分别从振动和电流信号中自动提取故障特征,然后通过首尾拼接的方式进行特征融合,最后使用多路极限学习机分类器识别电机-转子系统故障。虽然学者们已经对多传感源信息融合的三相电机智能故障诊断进行了一定探索与研究,但现有方法仍存在以下不足:①来自不同传感源的数据包含不同程度的故障信息,且同一传感数据在不同故障模式下的信息量差异较大,因而难以在数据层面对多传感源信息进行有效融合,同时决策级融合又无法充分利用多传感数据进行信息互补,进而限制了智能模型的诊断精度与泛化性;②现有的特征级融合诊断方法在故障信息挖掘与特征提取融合过程中缺乏明确的学习机制对不同传感源之间的故障特征进行差异度量与迭代聚合,导致其诊断性能易受不相关或冗余信息的影响。
为了解决以上问题,本文提出了一种基于博弈映射学习的多传感源信息融合三相电机智能故障诊断方法。该方法首先使用多个并行的自学习特征映射网络从各个传感数据中自动地提取故障特征并将其映射至公共信息度量空间中;然后,构建传感源鉴别器并使其与自学习特征映射网络形成博弈关系,引导公共信息度量空间中的故障特征跨传感源分类聚合;同时,为了增加不同故障特征的类间可分性,在训练优化目标中引入了样本差异度量损失函数;最后,将公共信息度量空间中的多传感故障特征输入到故障模式识别器中进行融合诊断。本文设计并开展了三相电机故障模拟实验,利用获取的振动、电流、声等多传感数据对提出方法的有效性进行了验证。提出方法的优势在于:①博弈学习的构建能够使网络在迭代训练中不断地对多传感源信息进行精炼,进而有效地提取关键故障特征而忽略无关测量噪声,使相同故障类型的不同传感源特征差异性更小、聚集度更高;②样本差异度量损失函数的引入确保了不同故障类型的多传感故障特征之间的空间可分性,使故障特征不仅在类内聚集,而且在类间分散,有利于准确地区分三相电机的各类机械或电气故障。
1 博弈映射学习智能故障诊断
1.1 博弈映射学习网络构建
本文所构建的博弈映射学习网络如图1所示,其由自学习特征映射网络、传感源鉴别器和故障模式识别器构成。自学习特征映射网络用于从输入的多传感数据中自动地提取各类三相电机故障特征,并将这些特征映射至公共信息度量空间中;传感源鉴别器用于度量公共信息度量空间中来自同一输入样本的各传感故障特征之间的差异性,并通过博弈学习促使自学习特征映射网络从多传感数据中提取与目标故障类型直接相关的关键故障特征,进而剔除不相关或冗余的传感信息;故障模式识别器用于识别三相电机的故障类型,其输入是公共信息度量空间中的多传感故障特征。此外,本文提出方法也构建了一个额外的损失函数——样本差异度量损失函数,旨在进一步度量公共信息度量空间中来自不同输入样本的各类多传感故障特征之间的差异性,使这些多传感故障特征不仅在同一故障类型内聚集,而且在不同故障类型间分散,提升故障模式识别器的分类准确性。

图1 博弈映射学习网络
假设输入样本的批量数为,每个样本包含个传感源,则第个(=1, 2,…,)输入样本可表示为=[1,2,…,],其中为样本的第个传感源数据。具体地,本文提出的博弈映射学习网络描述如下。
1.1.1 自学习特征映射网络

基于式(4),将=[1,2,…,]中的各传感数据输入对应的自学习特征映射网络中便可得到该输入样本在公共信息度量空间中的多传感故障特征=[1,2,…,]。
1.1.2 传感源鉴别器



1.1.3 样本差异度量损失函数


式中,为公共信息度量空间中单个传感故障特征的向量长度;X,a为的第个元素。
由式(9)可见,最小化样本差异度量损失函数能够使属于同一故障类型的多传感故障特征之间的差异性尽可能小,而属于不同故障类型的多传感故障特征之间的差异性尽可能大,保证了多传感故障特征的空间可分性,进而有利于区分不同类型的三相电机故障,提升博弈映射学习网络的诊断精度。
1.1.4 故障模式识别器

1.2 博弈学习过程
根据式(8)、式(9)和式(13),可得到博弈映射学习网络的目标函数定义为

表1 博弈学习训练过程
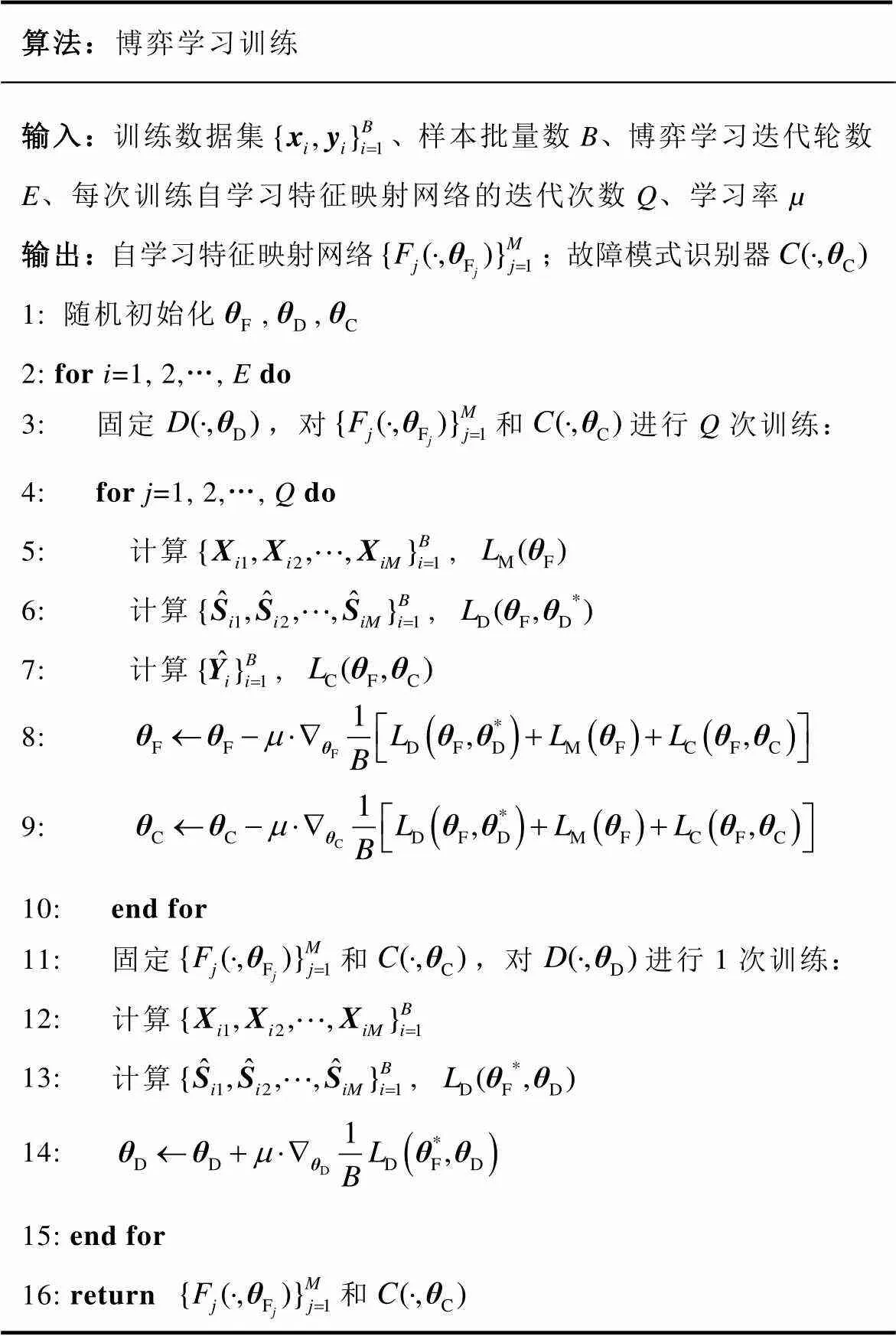
Tab.1 Training process of game learning
在上述过程中,通过最小化D训练自学习特征映射网络与通过最大化D训练传感源鉴别器构成了动态博弈。这一博弈过程将有效地促使自学习特征映射网络从输入的多传感数据中自动地提取关键故障信息而剔除无关的测量噪声,使样本内的多传感故障特征差异最小化并聚集在一起,最终达到纳什均衡状态,即传感源鉴别器无法鉴别各故障特征的传感来源。除了实现关键故障特征提取,博弈学习也实现了多传感源信息的类内融合(即同一故障类型的多传感故障特征在公共信息度量空间中紧密地聚集在一起)。进一步地,样本差异度量损失函数M的构建也确保了不同故障类型下的多传感故障特征在公共信息度量空间中分散分布,易于识别各类特征对应的目标故障类型,最终使提出的博弈映射学习网络具有优异的三相电机故障诊断性能。
2 实验验证
2.1 实验数据介绍
三相电机故障模拟实验在如图2所示的实验台上进行,该实验台通过变频器控制三相电机的转速,并通过电涡流制动器对三相电机施加扭矩。在实验过程中,三相电机的转频分别设置为15 Hz、25 Hz、35 Hz和45 Hz,且每种转频下均施加0 N·m和10 N·m两种扭矩。实验共模拟了11种不同的三相电机状态,包括正常状态、4种轴承故障、3种转子故障和3种电气故障,具体故障设置见表2,各故障部件的照片如图3所示。为了获取多传感数据,实验中采集了电机驱动端三向振动加速度信号、电机三相电流信号、转速信号和声信号,采样频率均为25.6 kHz。每种三相电机状态各采集400个样本,每个样本包含8通道的多传感数据,每个通道包含2 560个数据点。在后续实验验证中,本文将采集到的数据按三相电机转频分为A/B/C/D四个数据集,且每个数据集随机选取25%的样本用于网络训练,75%的样本用于网络测试。
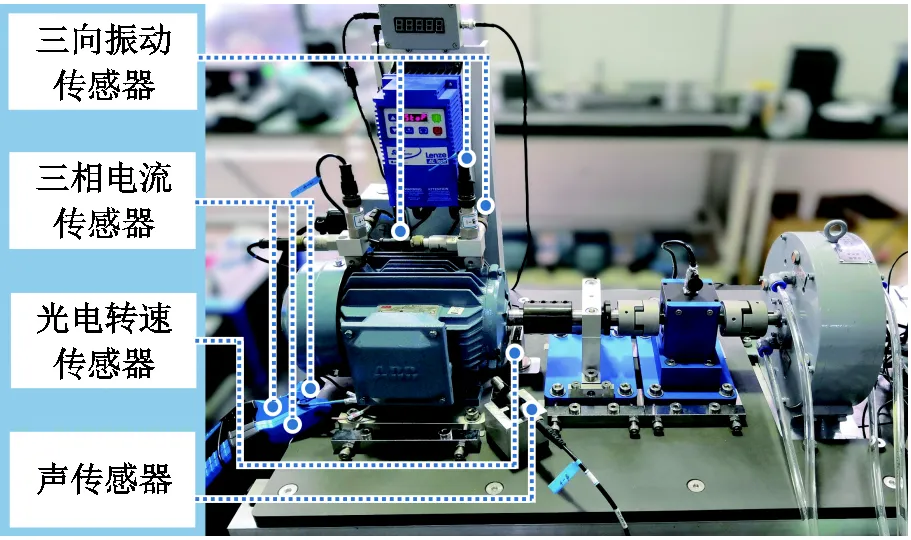
图2 三相电机故障模拟实验台及传感器布置
表2 三相电机故障数据集

Tab.2 Fault dataset of three-phase motors
2.2 实验结果及对比分析
2.2.1 样本批量数的选取
样本批量数是博弈映射学习网络训练过程中的一个重要参数,式(9)中的样本差异度量损失函数的计算与样本批量数直接相关。因此,本节首先研究了不同样本批量数对三相电机故障诊断结果的影响。同时,为了测试提出方法的鲁棒性,本节对测试集中的每个传感数据施加了高斯噪声,使其信噪比为0 dB。取不同值时,本文提出方法在未加噪测试集和加噪测试集上的诊断准确率如图4所示。
从图4中可以看出:①取不同值时,未加噪测试集的诊断准确率几乎没有变化,这表明在无噪声干扰下的取值对本文提出方法的诊断性能影响很小。②在加噪测试集中,随着样本批量数的增加,本文提出方法在加噪测试集上的诊断准确率呈现先上升后下降的趋势。这是因为当取值较小时,每次输入网络的训练样本代表性不足,导致样本差异度量损失函数的度量效果较差,不同故障类型的多传感故障特征混叠在一起,进而影响了诊断准确率;而当取值较大时,网络在迭代训练中容易陷入局部最优解,使本文提出方法的鲁棒性变差,诊断结果易受噪声影响。因此,为了使本文提出方法在不同噪声环境中均具有较好的故障诊断性能,将样本批量数设置为30。
2.2.2 多传感故障特征融合方式的选择
在1.1.4节中,本文采用逐元素相加的方式对多传感故障特征进行融合,但现有文献通常使用首尾拼接的融合方式。为了探究不同多传感故障特征融合方式对网络诊断性能的影响,本节利用上述两种融合方式开展了对比实验。其中,本文所使用的逐元素相加方式记为融合方式1,现有文献中常用的首尾拼接方式记为融合方式2。实验中所使用的硬件平台为英特尔酷睿i7-9750H处理器、8 GB运行内存。为了减少随机因素的影响,两种融合方式分别在数据集A、B、C、D上进行20次实验,结果见表3。
表3 不同融合方式的诊断准确率与计算耗时
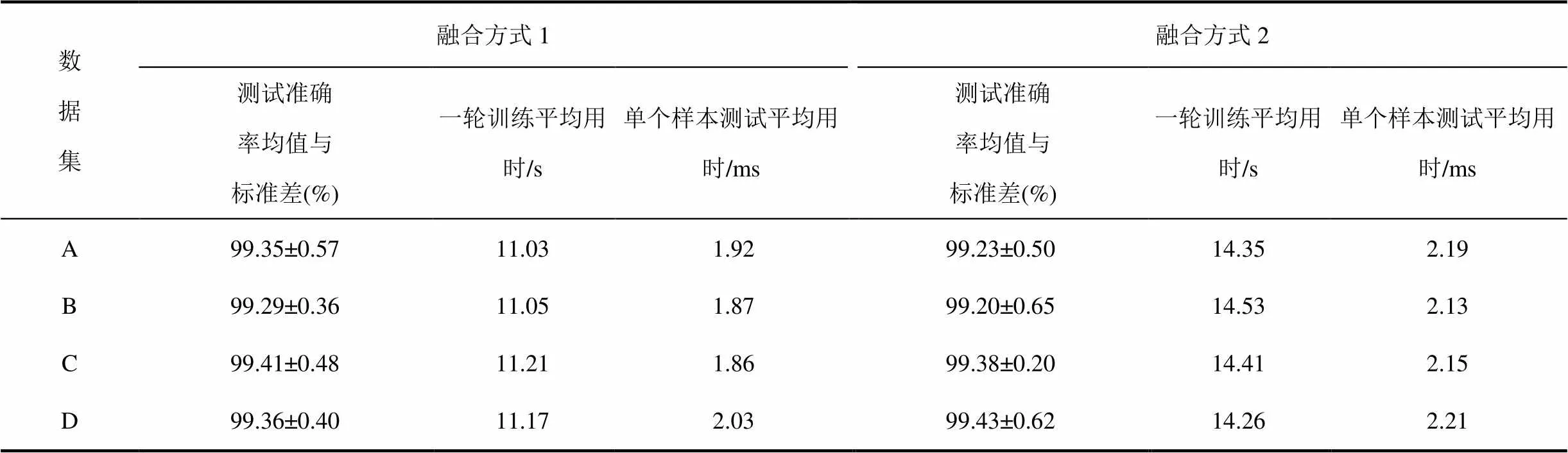
Tab.3 Fault diagnosis accuracy and computing time of different fusion methods
由表3可见,两种多传感故障特征融合方式在不同数据集上的测试准确率均超过了99%,说明博弈映射学习网络在使用这两种融合方式时均能准确地诊断三相电机的故障类型。然而,由于融合方式2所形成的融合特征维度更大,在网络中需要添加更多的神经元,导致其在训练和测试过程中的计算量更大且耗时也更多。因此,考虑到融合方式1具有更高的运算效率且其诊断准确率与融合方式2相当,本文选择融合方式1进行多传感故障特征融合。需要注意的是,本文提出方法在测试过程中的单个样本推理运算时间约为1.92 ms,这意味着在实际部署应用中,本文提出方法能在很短时间内输出三相电机的故障诊断结果,具有较好的实时性。
2.2.3 消融实验
为了详细地说明博弈学习和样本差异度量损失函数在三相电机故障诊断中的重要作用,本节开展了消融实验,即先根据本文提出方法构建三种相似的诊断方法,再对比分析这些方法的三相电机故障诊断性能。在消融实验中,三种对比方法与本文提出方法具有相同的网络结构,它们的不同之处在于:方法1既不使用博弈学习,也不使用样本差异度量损失函数;方法2只使用博弈学习,而不使用样本差异度量损失函数;方法3只使用样本差异度量损失函数,而不使用博弈学习。同时,为了测试各方法的鲁棒性,本节也对测试集中的每个传感数据施加了高斯噪声,且各方法均进行20次重复实验。图5给出了四种诊断方法在加噪测试集上的诊断准确率,而每种方法在诊断三相电机各类故障时的1score值如图6所示。
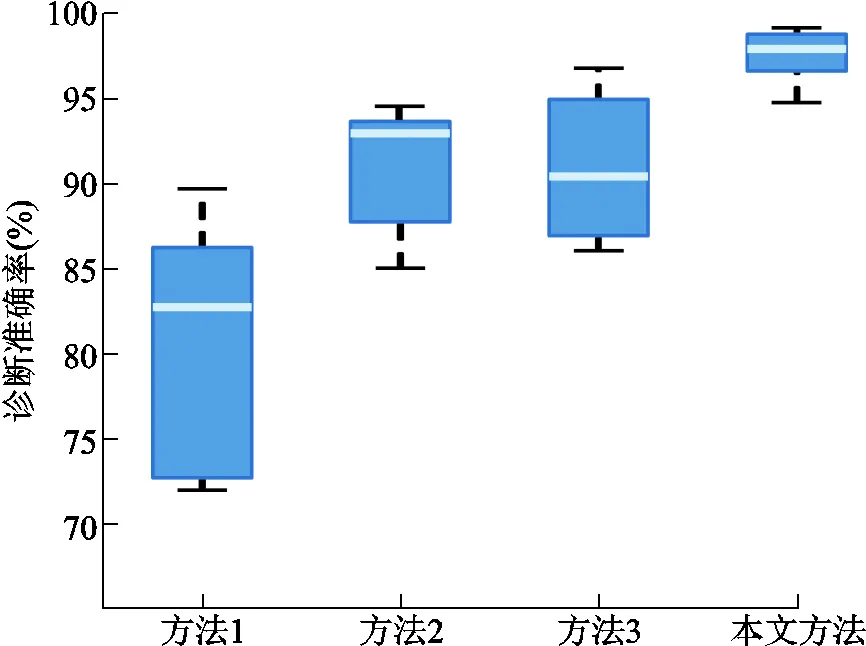
图5 消融实验诊断准确率

图6 各故障类型分类的F1 score值
从图5和图6中可以看出:①方法1的诊断准确率和1score值均低于其他诊断方法,且方法1的诊断准确率变化范围也最大,这说明对多传感数据进行特征级融合时,在特征提取过程中抑制无关的传感信息并引导故障特征按类聚集非常必要,而传统的特征级融合诊断方法缺乏这一明确的引导学习机制,导致其误诊率高且鲁棒性差;②方法2和方法3在诊断不同类型的三相电机故障时各有优劣,整体上两者的诊断准确性和鲁棒性相当,这表明通过使用博弈学习和样本差异度量损失函数分别度量样本内和样本间多传感故障特征的差异性,均能不同程度地提高三相电机故障诊断的准确率;③博弈学习和样本差异度量损失函数的联合作用使本文提出方法获得了比方法2和方法3更高的诊断准确率和1score值,且诊断准确率的变化范围更小。
为了更详细地说明上述消融实验中各方法对关键故障特征提取和聚类的效果,使用-分布式随机邻域嵌入算法(-distributed Stochastic Neighbor Embedding,-SNE)分别对四种诊断方法的融合特征进行降维并予以可视化,结果如图7所示。
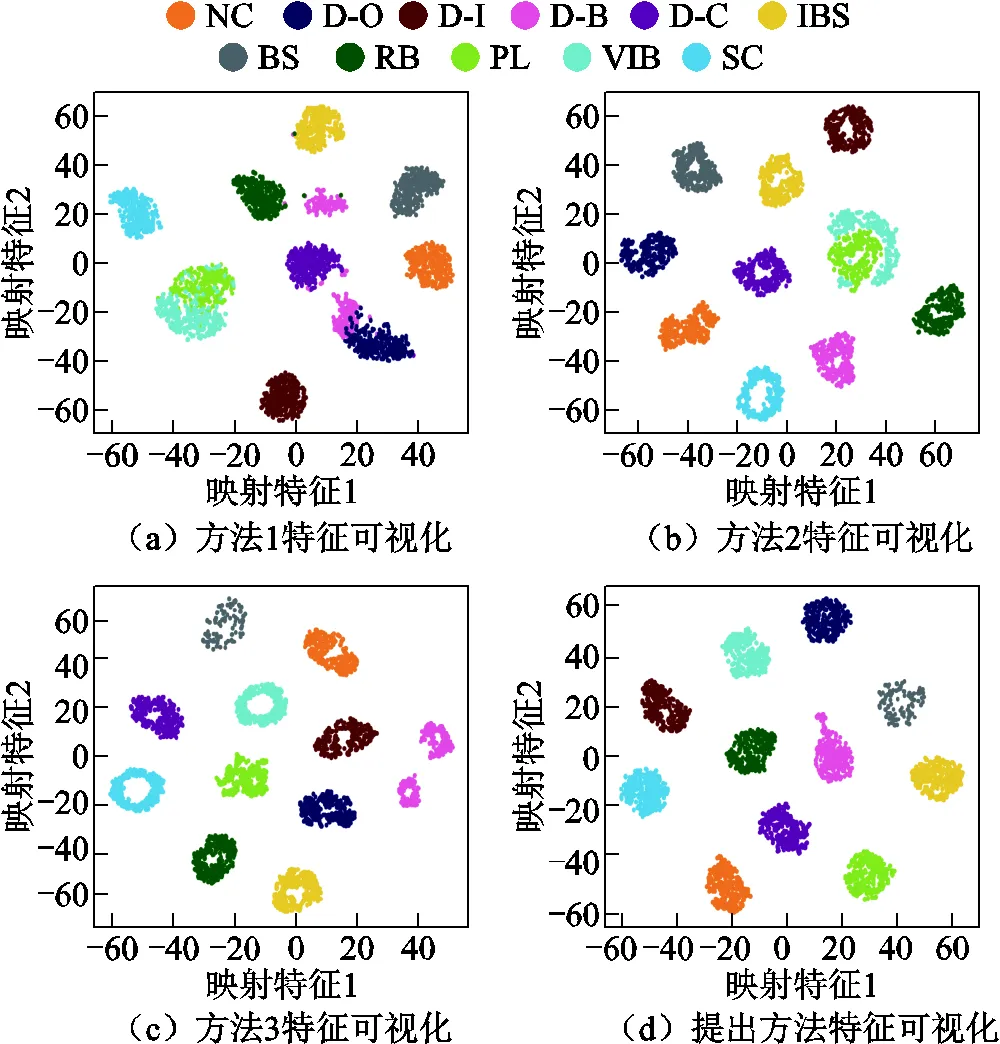
图7 不同诊断方法提取的故障特征散点图
由图7可见:①方法1的融合特征在不同故障类型间出现了混叠,且同一故障类型的特征也无法有效地聚集在一起。②在方法2的故障特征散点图中,相同故障类型的特征聚合效果较好,但在不同故障类型间特征仍然有部分混叠;在方法3的故障特征散点图中,不同故障类型的特征区分度较好,相同故障类型的特征虽然已经聚集在一起,但某些特征分布不集中。③本文提出方法的融合特征在相同故障类型内有效聚集且分布集中,在不同故障类型间有效分离且界限清晰。综上所述,得益于博弈学习和样本差异度量损失函数,本文提出方法能够从多传感源输入数据中提取关键故障特征而忽略无关测量噪声,并使提取的多传感故障特征在相同故障类型内聚集,在不同故障类型间分散,更有利于准确地诊断三相电机的各类机械或电气故障。
2.2.4 与现有方法的诊断效果对比
为了进一步验证本文提出方法在多传感源信息融合三相电机智能故障诊断中的优势,本节将其与表4中的四种现有特征级融合诊断方法进行了对比。提出方法及四种现有方法在A、B、C、D四个数据集上的三相电机故障诊断准确率如图8所示。
表4 用于对比的现有诊断方法

Tab.4 Existing diagnosis methods for comparison
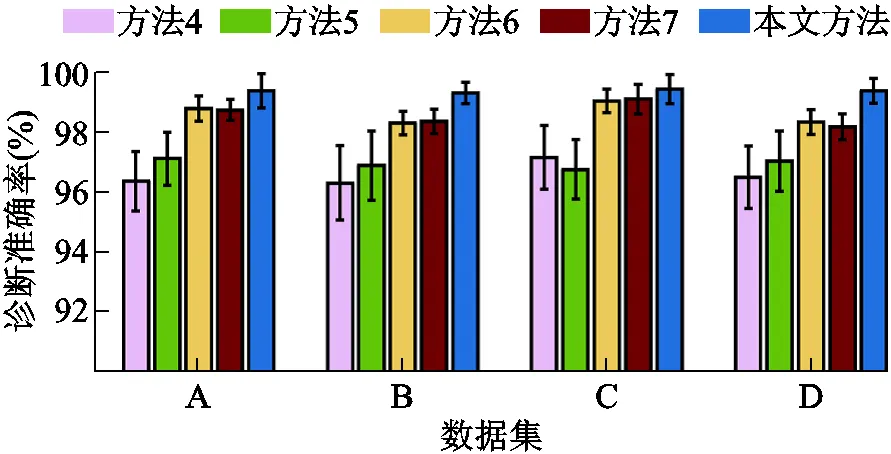
图8 不同方法的三相电机故障诊断准确率
观察图8可以发现:①方法4和方法5在四个数据集上的诊断效果均差于其余三种方法,这是因为这两种方法仅使用简单的首尾拼接特征融合方式,而在网络训练过程中缺乏有效的学习机制挖掘关键传感信息并引导故障特征分类聚合,导致其诊断准确率不佳。②尽管方法6也仅使用首尾拼接的特征融合方式,但是其预先对多传感数据进行了异常点剔除和傅里叶变换处理,减少了测量噪声的干扰,因而方法6获得了比方法4和方法5更优的诊断性能。然而,数据预处理技术的使用只能抑制部分测量噪声,无法从本质上提升网络的多传感故障特征提取与融合聚类能力。③方法7通过构造相似度矩阵以半监督的训练方式使来自不同样本的多传感故障特征在相同故障类型内差异性缩小,而在不同故障类型间差异性增大。该相似度矩阵的作用类似于本文提出方法中的样本差异度量损失函数,其只能有限地提升网络诊断性能,因而方法7的诊断准确率低于提出方法。④在五种特征级融合诊断方法中,本文提出方法在所有数据集上的三相电机故障诊断准确率均为最高,且均超过了99%。因此,本文提出方法的诊断性能优于其他四种现有方法,这种性能上的优势也再次证明了博弈学习和样本差异度量损失函数的有效性和重要性。
2.2.5 多传感故障特征迭代聚合过程可视化
在博弈映射学习网络迭代训练中,博弈学习和样本差异度量损失函数的共同作用使公共信息度量空间中的故障特征在类内聚集、类间分散,进而实现多传感源信息的有效融合。为了直观地展示这一多传感故障特征迭代聚合过程,本节分别获取不同训练轮数时公共信息度量空间中的多传感故障特征,并使用主成分分析对这些故障特征进行降维,绘制成如图9所示的三维散点图。图9中,不同形状代表不同的传感源,不同颜色代表不同的故障类型。特别地,为了便于观察,图9中仅显示了3个传感源(水平振动信号、垂直振动信号和U相电流信号)的故障特征散点。同时,为了定量展示多传感故障特征之间的差异性变化过程,绘制了网络迭代训练过程中传感源鉴别损失函数和训练准确率的变化曲线如图10所示。
从图9和图10中可以看出:①在训练初期,所有传感特征按照散点形状聚集为三簇,且相互之间距离较远,而每簇中不同颜色的特征散点混叠在一起。这表明此时多传感源信息并未融合,且网络提取的故障特征中包含大量无关或冗余的信息,难以区分不同故障类型。对应地,此时的训练精度较低,但传感源鉴别器可以很好地区分故障特征的来源,故传感源鉴别损失函数的值较大。②在训练轮数为20时,相同颜色的特征散点开始聚集在一起,但同颜色不同形状的特征散点仍然明显地分为三簇,这说明尽管此时故障特征已突破传感源边界并根据其对应故障类型开始聚合,但是同一故障类型下的不同传感源特征仍差异明显,需要进一步精炼多传感源信息去提取类内差异更小的关键故障特征。对应地,此时的训练准确率已提升至85%左右,而传感源鉴别损失函数的值也有所降低。③当训练轮数为100时,所有特征散点按照颜色分为多簇,且每簇内不同形状的特征散点也聚集在一起,这表明经过多次迭代训练后,公共信息度量空间中的故障特征已完成跨传感源分类聚合。此时,提取的特征不仅在相同故障类型内聚集,而且在不同故障类型间分散,使得三相电机的各类故障更易区分,诊断结果也更加准确。对应地,训练准确率已接近100%,而传感源鉴别器已难以区分各传感故障特征来源,其损失函数值降低至较小值。


图10 传感源鉴别损失函数及训练准确率变化曲线
3 结论
为利用多传感数据准确地诊断三相电机的各类机械或电气故障,本文提出了一种基于博弈映射学习的多传感源信息融合三相电机智能故障诊断方法。该方法通过构建博弈学习训练策略并在优化目标中引入样本差异度量损失函数,形成了明确的跨传感源关键故障信息挖掘及特征迭代聚合机制。本文设计并开展了三相电机故障模拟实验,利用获取的振动、电流、声等多传感数据对提出方法进行了验证,得到以下结论:
1)博弈学习能够有效地引导自学习特征映射网络从多传感数据中自动地提取关键故障特征并使其在类内聚集,从而避免了无关测量噪声或冗余传感信息的影响,提高了三相电机故障诊断结果的准确性与鲁棒性。
2)样本差异度量损失函数使不同类型的多传感故障特征在公共信息度量空间中呈簇状分散分布且界限清晰,有利于准确地区分三相电机的各类机械或电气故障。
3)相比于现有的特征级融合诊断方法,本文提出方法在故障信息挖掘与特征提取融合过程中具有更加全面而明确的学习机制,因而其诊断性能更优,且对三相电机轴承故障、转子故障和电气故障的诊断准确率超过了99%。
[1] Akay A, Lefley P. Research on torque ripple under healthy and open-circuit fault-tolerant conditions in a PM multiphase machine[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(4): 349-359.
[2] 卢锦玲, 张祥国, 张伟, 等. 基于改进辅助分类生成对抗网络的风机主轴承故障诊断[J]. 电力系统自动化, 2021, 45(7): 148-154.
Lu Jinling, Zhang Xiangguo, Zhang Wei, et al. Fault diagnosis of main bearing of wind turbine based on improved auxiliary classifier generative adversarial network[J]. Automation of Electric Power Systems, 2021, 45(7): 148-154.
[3] He Jiangbiao, Yang Qichen, Wang Zheng. On-line fault diagnosis and fault-tolerant operation of modular multilevel converters-a comprehensive review[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(4): 360-372.
[4] 雷亚国, 贾峰, 孔德同, 等. 大数据下机械智能故障诊断的机遇与挑战[J]. 机械工程学报, 2018, 54(5): 94-104.
Lei Yaguo, Jia Feng, Kong Detong, et al. Opportunities and challenges of machinery intelligent fault diagnosis in big data era[J]. Journal of Mechanical Engineering, 2018, 54(5): 94-104.
[5] Wang Zhenya, Yao Ligang, Cai Yongwu. Rolling bearing fault diagnosis using generalized refined composite multiscale sample entropy and optimized support vector machine[J]. Measurement, 2020, 156: 107574.
[6] Goyal D, Choudhary A, Pabla B S, et al. Support vector machines based non-contact fault diagnosis system for bearings[J]. Journal of Intelligent Manufacturing, 2020, 31(5): 1275-1289.
[7] 夏田, 詹瑶, 郭建斌. 基于小波包和梯度提升决策树的轴承故障诊断[J]. 陕西科技大学学报, 2020, 38(5): 144-149.
Xia Tian, Zhan Yao, Guo Jianbin. Bearing fault diagnosis based on Wavelet Packet and Gradient Boosting Decision Tree[J]. Journal of Shaanxi University of Science & Technology, 2020, 38(5): 144-149.
[8] Li Zefang, Fang Huajing, Huang Ming, et al. Data-driven bearing fault identification using improved hidden Markov model and self-organizing map[J]. Computers & Industrial Engineering, 2018, 116: 37-46.
[9] 史丽萍, 王攀攀, 胡泳军, 等. 基于骨干微粒群算法和支持向量机的电机转子断条故障诊断[J]. 电工技术学报, 2014, 29(1): 147-155.
Shi Liping, Wang Panpan, Hu Yongjun, et al. Broken rotor bar fault diagnosis of induction motors based on bare-bone particle swarm optimization and support vector machine[J]. Transactions of China Electrotechnical Society, 2014, 29(1): 147-155.
[10] Sun Meidi, Wang Hui, Liu Ping, et al. Stack autoencoder transfer learning algorithm for bearing fault diagnosis based on class separation and domain fusion[J]. IEEE Transactions on Industrial Electronics, 2022, 69(3): 3047-3058.
[11] Niu Guangxing, Wang Xuan, Golda M, et al. An optimized adaptive PReLU-DBN for rolling element bearing fault diagnosis[J]. Neurocomputing, 2021, 445: 26-34.
[12] Shao Haidong, Xia Min, Han Guangjie, et al. Intelligent fault diagnosis of rotor-bearing system under varying working conditions with modified transfer convolutional neural network and thermal images[J]. IEEE Transactions on Industrial Informatics, 2021, 17(5): 3488-3496.
[13] 田代宗, 孙宇光, 王善铭, 等. 多相整流永磁同步发电机绕组内部相间短路的故障分析[J]. 电工技术学报, 2020, 35(6): 1262-1271.
Tian Daizong, Sun Yuguang, Wang Shanming, et al. Analysis of stator internal phase-to-phase short-circuit in the multiphase permanent magnet synchronous generator with rectifier load system[J]. Transactions of China Electrotechnical Society, 2020, 35(6): 1262-1271.
[14] 许爱德, 任萍, 陈加贵, 等. 基于电感特殊位置点的开关磁阻电机转子位置检测及误差补偿[J]. 电工技术学报, 2020, 35(8): 1613-1623.
Xu Aide, Ren Ping, Chen Jiagui, et al. Rotor position detection and error compensation of switched reluctance motor based on special inductance position[J]. Transactions of China Electrotechnical Society, 2020, 35(8): 1613-1623.
[15] 孙曙光, 李勤, 杜太行, 等. 基于一维卷积神经网络的低压万能式断路器附件故障诊断[J]. 电工技术学报, 2020, 35(12): 2562-2573.
Sun Shuguang, Li Qin, Du Taihang, et al. Fault diagnosis of accessories for the low voltage conventional circuit breaker based on one-dimensional convolutional neural network[J]. Transactions of China Electrotechnical Society, 2020, 35(12): 2562-2573.
[16] 李睿彧, 刘飞, 梁霖, 等. 基于参数优化变分模态分解的交流变频电机转子断条故障识别方法[J]. 电工技术学报, 2021, 36(18): 3922-3933.
Li Ruiyu, Liu Fei, Liang Lin, et al. Fault identification of broken rotor bars for the variable frequency AC motor based on parameter optimized variational mode decomposition[J]. Transactions of China Electrotechnical Society, 2021, 36(18): 3922-3933.
[17] 杨明, 黄旭, 任博阳, 等. 基于转速信号的电机首次安装角度不对中故障检测[J]. 电工技术学报, 2021, 36(15): 3191-3199.
Yang Ming, Huang Xu, Ren Boyang, et al. Angle misalignment fault detection method of motor’s first installation based on speed signal[J]. Transactions of China Electrotechnical Society, 2021, 36(15): 3191-3199.
[18] 王栋悦, 谷怀广, 魏书荣, 等. 基于机电信号融合的DFIG定子绕组匝间短路故障诊断[J]. 电力系统自动化, 2020, 44(9): 171-178.
Wang Dongyue, Gu Huaiguang, Wei Shurong, et al. Diagnosis of inter-turn short-circuit fault in stator windings of DFIG based on mechanical and electrical signal fusion[J]. Automation of Electric Power Systems, 2020, 44(9): 171-178.
[19] Wang Jinjiang, Fu Peilun, Zhang Laibin, et al. Multilevel information fusion for induction motor fault diagnosis[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(5): 2139-2150.
[20] Zhang Tianfan, Li Zhe, Deng Zhenghong, et al. Hybrid data fusion DBN for intelligent fault diagnosis of vehicle reducers[J]. Sensors, 2019, 19(11): 2504.
[21] Hoang D T, Kang H J. A motor current signal-based bearing fault diagnosis using deep learning and information fusion[J]. IEEE Transactions on Instrumentation and Measurement, 2020, 69(6): 3325-3333.
[22] Jian Xianzhong, Li Wenlong, Guo Xuguang, et al. Fault diagnosis of motor bearings based on a one-dimensional fusion neural network[J]. Sensors, 2019, 19(1): 122.
[23] Zhao Xiaoli, Jia Minping, Ding Peng, et al. Intelligent fault diagnosis of multichannel motor–rotor system based on multimanifold deep extreme learning machine[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25(5): 2177-2187.
[24] Xu Xingwei, Tao Zhengrui, Ming Weiwei, et al. Intelligent monitoring and diagnostics using a novel integrated model based on deep learning and multi-sensor feature fusion[J]. Measurement, 2020, 165: 108086.
[25] Azamfar M, Singh J, Bravo-Imaz I, et al. Multisensor data fusion for gearbox fault diagnosis using 2-D convolutional neural network and motor current signature analysis[J]. Mechanical Systems and Signal Processing, 2020, 144: 106861.
An Intelligent Multi-Sensor Information Fusion Fault Diagnosis Method of Three-Phase Motors Based on Game Mapping Learning
Ren Xiangyu1,2Qin Yong1,2Wang Biao1,2Jia Limin1,2Cheng Xiaoqing1,2
(1. State Key Laboratory of Rail Traffic Control and Safety Beijing Jiaotong University Beijing 100044 China 2. School of Traffic and Transportation Beijing Jiaotong University Beijing 100044 China)
Mechanical and electrical faults of three-phase motors can be comprehensively recognized by using multi-sensor data. Existing intelligent fault diagnosis methods, however, are short of an explicit learning mechanism to effectively mine key fault information and fuse multi-sensor features, thereby limiting their diagnosis performance. To overcome these problems, this paper proposes an intelligent multi-sensor information fusion fault diagnosis method based on game mapping learning for three-phase motors. By automatically extracting fault features from different sensor data and adaptively fusing them, the proposed method can accurately recognize various faults of three-phase motors.
First, multiple parallel self-learning feature mapping networks are used to automatically extract fault features from different input data from multi-sensor sources. Then, a sensor source discriminator is constructed to form a game-playing relationship between it and self-learning feature mapping networks, aiming to refine fault features and make them aggregate by fault categories. Meanwhile, for ensuring the spatial separability of different types of fault features, a sample difference metric loss function is introduced to the optimization objective. Finally, a fault pattern recognizer is employed to fuse multi-sensor features and classify motor faults.
Three-phase motor fault simulation experiments are designed and carried out in this paper. The multi-sensor data, including vibration, current and sound signals, are obtained to verify the proposed method. First, the selection of some hyper-parameters is discussed, and some implementation details of the network are determined. Then, the ablation experiments are performed and the experimental results are as follows. (1) The additions of game-playing learning strategy and sample difference metric loss function improve the diagnostic accuracy of the network. (2) The combined effect of game-playing learning strategy and sample difference metric loss function makes the average accuracy of the proposed method over 99%. Next, the comparison between the proposed method and the state-of-the-art methods shows that, the proposed method has the highest accuracy and the best stability in mechanical and electrical fault diagnosis of three-phase motors. Meanwhile, the above results also explain that the lack of an explicit learning mechanism in fusing multi-sensor features will lead to poor diagnosis accuracy. Finally, the aggregation process of the fault features from different sensor data is visualized. The results show that, the game-playing learning strategy and the sample difference metric loss function make the fault features aggregate by fault categories, thus realizing the effective fusion of multi-sensor source information.
The following conclusions can be drawn from the experimental analyses: (1) Game-playing learning can guide the network to automatically extract fault features from multi-sensor data and make them aggregate within the class, thus avoiding the influence of irrelevant measurement noise or redundant sensor information, and improving the accuracy and robustness of three-phase motor fault diagnosis results. (2) The sample difference metric loss function makes different types of multi-sensor fault features distributed in clusters and clear boundaries, which is conducive to accurately distinguish various mechanical or electrical faults of three-phase motors. (3) Compared with the existing feature-level fusion diagnosis methods, the proposed method has an explicit learning mechanism in the process of feature extraction and fusion, and accordingly its diagnosis performance is better.
Three-phase motor, intelligent fault diagnosis, multi-source sensor information fusion, adversarial learning, information metric
TM307.1
10.19595/j.cnki.1000-6753.tces.220936
北京交通大学人才基金(2022RC030)、轨道交通控制与安全国家重点实验室自主研究课题(RCS2022ZQ002)和国家自然科学基金(61833002)资助项目。
2022-05-3
2022-07-02
任翔宇 男,1998年生,博士研究生,研究方向为轨道交通电气设备智能故障诊断。E-mail:renxybjtu@outlook.com
王 彪 男,1992年生,讲师,硕士生导师,研究方向为轨道交通电气设备故障预测与健康管理。E-mail:wbiao@bjtu.edu.cn(通信作者)
(编辑 李冰)
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
上海文化(文化研究)(2022年3期)2022-06-28
数学年刊A辑(中文版)(2022年4期)2022-02-16
哈尔滨铁道科技(2020年4期)2020-07-22
数学年刊A辑(中文版)(2019年3期)2019-10-08
电子制作(2018年23期)2018-12-26
中国学术期刊文摘(2016年1期)2016-02-13
电测与仪表(2015年12期)2015-04-09
中国舰船研究(2014年6期)2014-05-14
