某车载高机动雷达天线阵面结构设计
2023-09-13 03:43陈凡龙赵承三邱坤滨
雷达与对抗 2023年1期
陈凡龙,赵承三,邱坤滨
(中国电子科技集团公司第三十八研究所,合肥 230088)
0 引 言
车载雷达相较其他同类雷达具备快速可靠架设和撤收功能,大大提升了雷达战时的生存能力。为扩大低频段天线阵面的口径,不仅须折叠天线阵面,甚至还要将天线单元倒伏放置,从而压缩运输状态下的天线阵面包络。为配合车载雷达的快速架/撤功能,研究一种具备天线单元自动翻转功能的可折叠天线阵面显得尤为重要。本文基于一种低频段雷达,提出一种天线单元被动翻转的高机动天线阵面结构设计方法。
1 组 成
主天线阵面结构尺寸约为9 m×5.2 m(方位×俯仰),为满足公路、铁路、水路运输通过性需求,确保整车机动性能的实现,天线阵面沿高度方向共分3块:上阵面、中阵面和下阵面,上阵面集成二次天线。在运输状态时,3个阵面呈“门”字型折叠,折叠后外形宽度约为2.5 m;当处于工作状态时,整个阵面骨架合为一体形成完整阵面。中阵面与转台之间由两处支耳连接,通过两组电动缸实现阵面90°翻转;上阵面、下阵面分别通过两组电动缸与中块连接,实现展开与折叠。同时,边阵面和中阵面上的天线单元通过联动机构实现折叠与展开,如图1所示。

图1 主天线阵面展开和折叠示意图
该天线阵面由1个中阵面、1个上阵面和1个下阵面组成,3个子阵面各安装2×8(行×列)天线单元,上阵面和下阵面相对于中阵面上下对称布置,与中阵面之间都通过4处支耳连接,通过各两组电动缸实现翻转。天线阵面的主要设备包括:天线骨架、反射网、阵面机柜、DAM总成、二次雷达和GPS天线,其中二次雷达天线和两个GPS天线固定安装在上阵面的顶端,如图2所示。
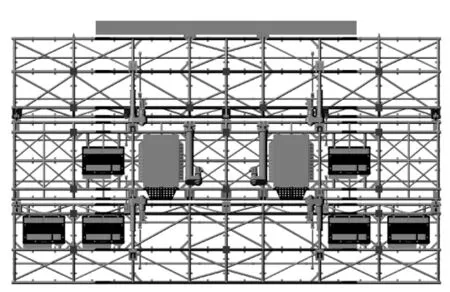
图2 天线阵面示意图
2 结构设计
2.1 天线骨架结构设计
天线骨架采用桁架式结构,尺寸为9 m×5.2 m(方位×俯仰),采用铝管焊接成桁架式结构[1]。铝管选用5A06铝合金管型材,规格为Ф50×4、Ф40×3和Ф30×3。天线骨架由上边块、中块和下边块组成,各分块之间通过铰链连接,由边块折叠电动缸提供动力。运输时上、下边块通过电动缸折叠90°倒下,与中块形成“门”字型结构,完成天线撤收。
天线中骨架的主要功能是安装阵面翻转机构及电子设备,并提供结构载体与举升机构连接实现雷达天线阵面举升和倒伏,其主要接口包括阵面翻转机构安装接口、综合机柜安装接口、转台连接接口、举升电动缸连接接口、DAM总成机柜接口等,其中阵面翻转机构安装接口为边块折叠电动缸的接口。天线中骨架采用5A06铝合金管材焊接而成,连接支耳也选用5A06铝合金材质,支耳孔内嵌工程塑料轴套。中块天线骨架的结构及安装接口如图3所示。

图3 天线中骨架结构及安装接口
该雷达天线骨架上边块的主要功能是安装阵面展开机构、提供结构载体、安装二次雷达天线和GPS天线等,其主要接口包括阵面翻转机构安装接口、二次雷达天线安装接口和GPS天线安装接口等。上边块的结构及安装接口如图4所示。

图4 天线骨架上边块结构及安装接口
该雷达天线骨架下边块的主要功能是安装阵面展开机构、提供结构载体、安装DAM总成机柜等,其主要接口包括阵面翻转机构安装接口、DAM总成机柜安装接口等。下边块的结构及安装接口如图5所示。

图5 天线骨架下边块结构及安装接口
该雷达反射网先用几种规格的条状铝板铆接,然后用铝丝和铝板焊接成型,四周预留与天线骨架的安装接口,如图6所示。

图6 反射网结构形式
2.2 天线单元结构设计
天线单元为T型振子形式,共48个,分为6行8列。中块和上、下边块上分别布置了2行8列天线单元。当工作时,天线单元水平垂直于天线反射面。运输时,天线单元翻转90°,与反射面平行。每个子阵面的每行振子分为两个旋转杆,两杆同轴且固定旋转,旋转杆通过轴承和轴承座与天线骨架连接,并通过天线单元联动机构实现天线单元的一次性自动翻转。图7为单行天线单元结构图。
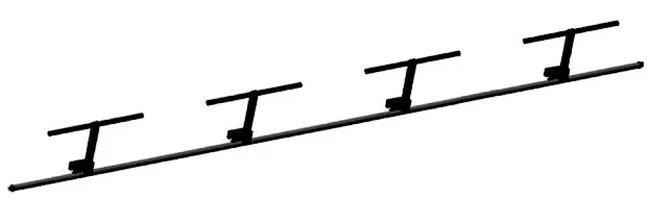
图7 单行天线单元结构示意图
2.3 天线阵面结构设计
天线阵面包含天线骨架、反射网、阵面机柜、DAM总成、二次雷达和GPS天线,将所有设备集成后,连接上相应电缆,所设计的天线阵面结构形式如图8所示。
3 天线单元联动机构结构设计
天线单元联动机构位于骨架内部,其一端固定于骨架上,另一端连接天线单元转杆,通过边骨架的折叠与展开驱动联动机构运动,最终驱动天线单元作动。
联动机构的主要功能:在运输过程中,联动机构约束天线单元折叠贴附于阵面之上,既可防止天线阵面运输超限,又保证了天线单元在运输过程中的刚度特性。在工作过程中,联动机构驱动天线单元随边块的展开动力而自动翻转至工作状态,省去了雷达操作人员手工翻转再固定的流程,提高了架设和撤收效率。
48个天线单元可分为两类:中块天线单元(2×8=16个)和边块天线单元(4×8=32个),二者的自动翻转均基于四连杆机构的运动原理[2]。由铰链四连杆机构类型的判断条件可知,图9中边阵面上联动机构为双摆杆机构,不存在曲柄;中阵面上联动机构为双曲柄机构,且两个连架杆等长,在运动中的某一瞬时为反平行四边形机构。天线阵面的展开状态、中间状态和折叠运输状态分别如图9(a)~(c)所示,其中图中标识的角度为边阵面与中阵面的瞬时夹角。
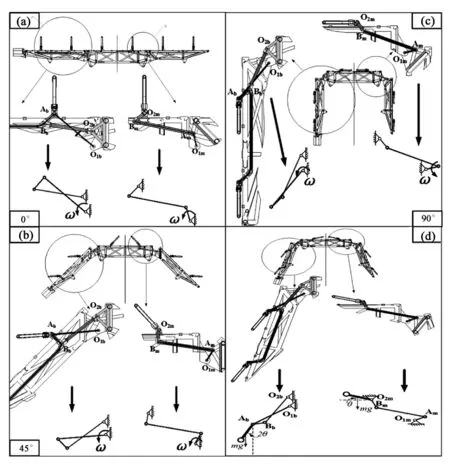
图9 特定角度下天线单元运动原理图
通过简单的理论力学计算,对阵面任一状态下天线单元及其联动机构的运动形式进行分析,最后可得连杆产生的附加阻力矩约为200 Nm(计及射频线缆阻力在内),简化过程见图9(d)。
4 天线结构仿真分析
4.1 模型建立
基于有限元建模基本原则和简化方法,根据雷达系统的具体结构形式,建立有限元模型如图10所示[3-5],此处进行了一定的简化,去除了对结构力学性能影响较小的倒角、小螺纹等结构。天线骨架的铝合金管材简化为梁单元,天线骨架上的支耳等简化为壳单元,转台、撑腿等结构也主要采用壳单元进行模拟,阵面机柜、DAM总成、二次天线配重等非承力结构采用质量单元进行等效。模型共包含144 533个单元和132 617个节点。分析模型的质量与设计模型一致。
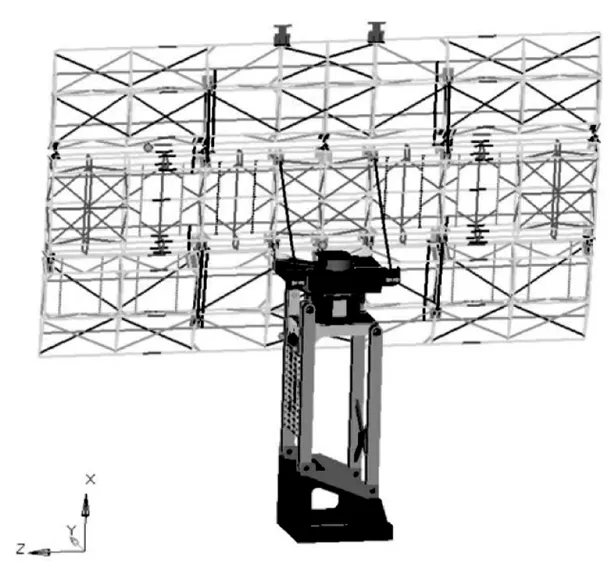
图10 天线系统有限元模型
天线骨架主体部分结构所使用的材料主要为5A06铝合金,转台和车平台主体部分结构所使用的材料主要为Q355D合金钢,各部分承力结构材料参数见表1。仿真工况:天线处于工作状态,天线仰角85°,考虑自重,正向迎风20 m/s,天线转速为6 r/min。
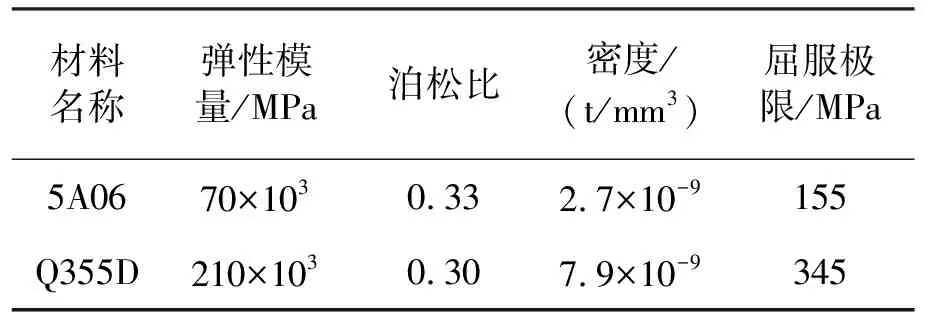
表1 材料力学性能表
4.2 仿真结果分析
在阵面架设状态下,天线系统和天线阵面的力学分析结果如图11所示。
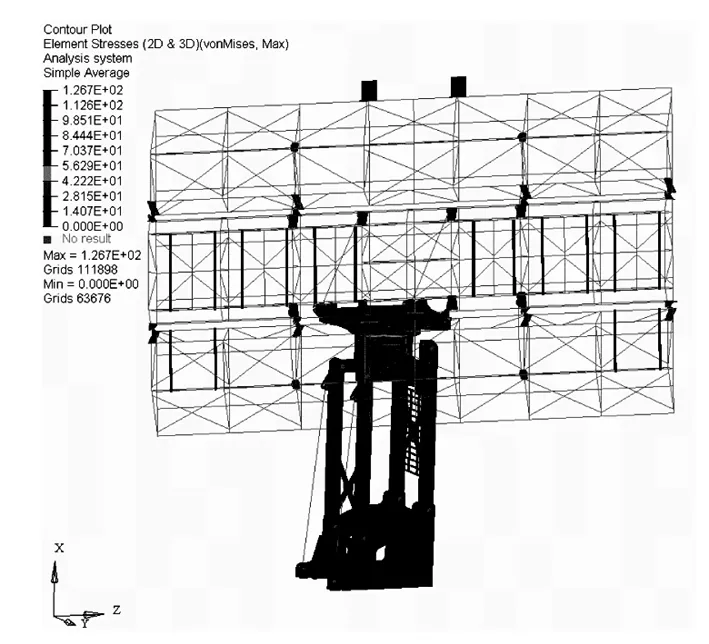
(a) 天线系统
可以看出,在工作状态下,天线系统材料Q355D应力最大响应位于转台与肋板的连接位置,其等效应力为127 MPa;天线阵面的应力最大响应位于靠近中心的斜撑梁位置,其等效应力为19.3 MPa,结构安全。天线阵面和转台等强度均满足设计要求,且有一定的安全余量[2]。
图12给出了天线阵面前3阶模态频率及振型,分别表征天线阵面前后摇摆、左右扭动和左右摇摆。前3阶模态的频率均大于1.5 Hz,满足环境设计要求(≥1.5 Hz)。

(a)一阶模态,频率为2.71 Hz
5 结束语
本文设计了天线单元可随动翻转的天线阵面,驱动天线单元的联动机构结构简单、制造方便、可靠性高,实现了天线单元随天线阵面的高精度翻转。因此本文的天线阵面在车载雷达的架设和撤收过程中表现出了高可靠性和易维修性,其结构设计方法可为类似的天线阵面的结构设计提供参考。
猜你喜欢
电子机械工程(2022年2期)2022-04-25
仪器仪表用户(2021年10期)2021-11-27
科技研究·理论版(2021年20期)2021-04-20
舰船电子对抗(2021年1期)2021-04-15
铁道通信信号(2020年9期)2020-02-06
电子测试(2017年12期)2017-12-18
系统工程与电子技术(2016年4期)2016-08-24
火控雷达技术(2016年2期)2016-02-06
火控雷达技术(2016年2期)2016-02-06
自动化博览(2014年7期)2014-02-28