一种全电推进卫星测控任务仿真分析方法
2023-09-09 06:39:12陈杰徐楠王海旭吕原草陈亮亮魏强
航天器工程 2023年4期
陈杰 徐楠 王海旭 吕原草 陈亮亮 魏强
(中国空间技术研究院通信与导航卫星总体部,北京 100094)
全电推进卫星取消了化学推进系统,采用电推进系统完成卫星变轨、位保等任务,其最大应用优势是[1-2]:①减小卫星发射质量,提高承载效率;②降低卫星综合成本,提高市场竞争力;③突破化学推进比冲限制,增加卫星在轨服务寿命;④实施小推力推进,有助于有效载荷的精确控制。目前,国内已在多个卫星任务中完成电推进系统的在轨点火试验,以及完成了地球静止轨道卫星的轨道保持任务,但尚无基于电推进系统的轨道转移应用实践。由于电推进系统提供的推力小,一般为几十毫牛到几百毫牛,全电推进卫星进入目标轨道的时间长达数月,其变轨控制策略也不同于采用化学推进系统的卫星;同时,为保证电推进变轨推力指向和能源需求,卫星的姿态会不断调整,并且在转移轨道初期轨道高度较低时,地面测控站交替可见,可视弧段少且短。因此,如何保证轨道转移过程中测控任务设计对任务成败起着决定性的影响,也是工程应用亟需解决的问题[3]。
对于化学推进卫星,其变轨策略相对成熟,在整个变轨过程中卫星姿态也相对固定且单一,在其任务设计时,变轨策略一般都采用5次点火方案,并且可以在每次关键事件前数小时开始,卫星测控天线能覆盖地面测控站,即有足够长的测控弧段安排测控任务[4]。在测控任务分析时,由于化学推进卫星星载测控系统的设计基本可实现近全空间覆盖,因此在实际工程应用中通过卫星与地面测控站视距可见即确定为测控弧段。而对于测控弧段内测控链路的可用性复核,则通常使用编制专用计算表格的方式,由测控弧段内的最远星地距离、测控天线增益的技术指标进行复核计算。但是,这种方式无法体现测控弧段内卫星姿态变化及测控天线方向图实际状态(特别是在测控天线方向图的干涉区)对测控链路的影响。因此,在工程应用中,通常会在标称的测控弧段开始后通过不断尝试接收卫星遥测数据、发送空闲数据,以判断卫星在当下是否具备执行测控任务的状态。文献[5]中以星地通信为例阐述了通信链路余量计算的方法。文献[6]中以中继通信系统为例对中继链路进行了动态分析和计算。文献[7]中以敏捷卫星为例对卫星测控链路性能进行了仿真分析。目前,尚未查到与全电推进卫星测控任务分析相关的公开文献。
为解决我国全电推进卫星在轨工程应用问题,本文提出了一种全电推进卫星测控任务分析方法,针对测控任务设计的不同需求可实现测控任务的仿真分析,可为全电推进卫星在轨工程应用提供支持。
1 测控任务分析方法
卫星测控任务分析流程如图1所示。①根据卫星总体输入,创建一个测控任务分析场景,后续可在场景中加入参加任务的卫星和地面测控站等对象。在创建场景时需要根据卫星总体任务确定起始时间、结束时间及星历时刻等。②根据卫星总体输入,确定测控任务场景中卫星姿态、卫星轨迹、测控天线射频特性,以及可用地面测控站特性(包括最低可用跟踪仰角、等效全向辐射功率、接收系统品质因数G/T等)。③确定测控任务分析的各项约束条件,主要为测控链路余量。④开展系统分析,通常可采用仿真软件进行系统分析。⑤生成分析结果,将任务分析的结果进行处理,可采用图表甚至动画的形式直观展示系统分析的结果。⑥重复步骤③~⑤,直至分析结果满足工程应用的要求。
对于测控任务分析方法中的②,在传统测控任务分析中通常使用编制专用计算表格,而受限于表格计算的方法,在任务分析中需要简化测控天线的射频特性,仅考虑测控天线技术指标提出的最低增益及对应的测控覆盖区,这种简化不能全面反映测控天线实际方向图对测控链路性能的影响,通常仅适用于在轨无大角度姿态机动卫星的测控链路分析。为解决上述问题,本文将测控天线方向图导入仿真软件,在测控任务分析中考虑实际测控天线方向图对测控链路性能的影响。测控任务分析方法中的④,同样受限于专用计算表格的方法,在传统测控任务分析中通常给出整个任务过程中最远的星地距离,然后将该距离代入专用计算表格,复核测控链路余量,而这种简化不能全面反映卫星轨道及姿态动态变化对测控链路性能的影响,同样仅适用于在轨无大角度姿态机动卫星的测控链路分析。
对于测控上行链路,星载应答机接收的功率如式(1)所示[8]。
[PR]=[EG]-[LF]-[LA]-[LTr]-
[LP]+[GR]-[LR]
(1)
式中:EG为地面站发射的等效全向辐射功率;LF为自由空间损耗;LA为大气损耗;LTr为指向损耗;LP为极化损耗;GR为测控天线的接收增益;LR为测控天线至星载应答机的馈线损耗。
对于测控下行链路,地面站总的接收信噪谱密度比如式(2)所示[8]。
[C/N0]=[ES]-[LF]-[LA]-[LTr]-
[LP]-[κ]+[G/T]
(2)
式中:卫星发射的等效全向辐射功率[ES]=[PT]-[LT]+[GT],其中,PT为星载应答机发射功率,LT为星载应答机至测控天线的馈线损耗,GT为测控天线的发射增益;κ为玻尔兹曼常数。
在上述参数中,除EG,LR,PT,LT,κ,G/T外,其余所有参数均与卫星和地面站距离、卫星和地面站的角度息息相关,采用传统编制专用计算表格的方式实时计算卫星与地面站距离的变化及卫星姿态的变化引起的测控链路性能变化是不现实的。本文通过动力学和电磁学等多学科耦合仿真实现全电推进卫星的数字孪生,做到全电推进卫星轨道转移数字模型实时伴飞。
2 仿真分析及结果
为验证本文的方法,仿真分析某全电推进卫星的测控任务。该全电推进卫星的变轨策略采用文献[9]中提出的推力矢量分段固定法简化策略,其变轨过程分为以下3个阶段。①推力矢量沿轨道切向,作用是提高半长轴,尽快将近地点高度抬高至1000km以上,离开稠密大气,以减小大气阻力摄动影响。②推力矢量在轨道平面内分量沿轨道切向,作用是提高半长轴,同时推力矢量与轨道平面有一固定夹角ψ1,作用是压低倾角。ψ1在轨道辐角90°和270°的2个点前后改变正负。此阶段半长轴增大至42164km附近,轨道周期接近24h。与①相比,推力增加了轨道平面外的分量。③推力矢量在轨道平面内分量垂直于轨道拱轴,作用是减小偏心率,同时推力矢量与轨道平面有一固定夹角ψ2,作用是继续压低倾角。ψ2同样需要在轨道辐角90°和270°的2个点前后改变正负。此阶段完成偏心率最终修正,卫星进入倾角为0°的圆形地球静止轨道。
相应地给出上述全电推进卫星星载测控系统设计。由于卫星背地面布局限制,卫星背地面无法放置测控天线,因此必须根据上述限制和总体任务需求对星载测控系统设计进行优化调整。图2给出了星载测控系统方案,其由2台应答机、2组测控天线、2台测控放大器及相关无源设备组成。2组测控天线布置在卫星对地面,同时为兼顾卫星背地面的测控覆盖,安装在卫星本体坐标系XOZ面内,1组与+X和+Z的夹角为45°,另外1组与-X和+Z的夹角为45°,单副测控天线覆盖指标为90°半锥角。理论测控天线覆盖如图3所示。从图3中可以看到:由于卫星背地面未布置测控天线,在背地面(-180°~-135°)及(+135°~+180°)范围内为理论测控覆盖盲区。
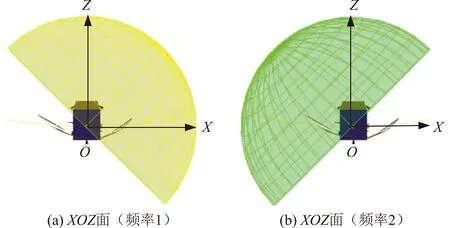
图3 理论测控天线覆盖Fig.3 Theoretical TT&C antenna coverage
由于卫星外部设备及卫星本体引起的遮挡等原因,全向天线方向图成不规则形状,在工程中一般通过电磁场仿真软件计算全向测控天线在整星条件下的仿真数据,同时考虑飞行事件,将太阳翼收拢展开、反射面天线收拢展开的状态计算在内,并以此作为实际测控链路性能分析的依据。
仿真软件支持将外部天线方向图应用于链路性能仿真分析,要求文件格式必须按照仿真软件规定的格式生成文件。另外,由于原来的电磁场仿真软件所定义的天线方向图的格式及坐标系较为特殊,与仿真软件中的定义存在差异,因此需要进行数据格式转换,之后才能用于仿真软件测控链路性能仿真分析[10]。
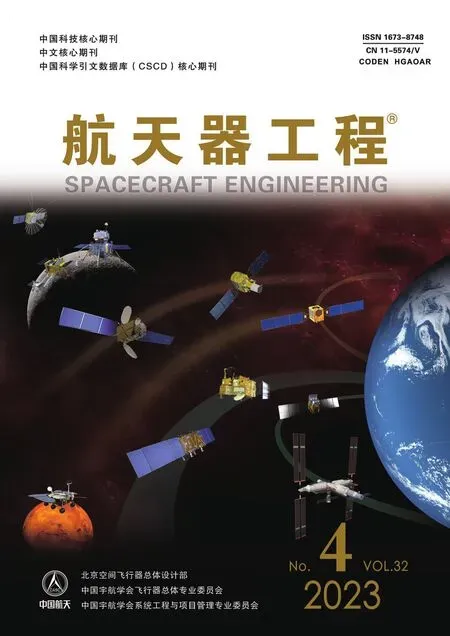
图4为实际测控天线方向图。通过与图3对比可以看到:理论测控覆盖基本与实际测控覆盖一致,而理论测控覆盖盲区在实际测控覆盖中也并非完全不可见,只是此处天线增益小。但是,当全电推进卫星轨道高度较低时,其可视弧段短且少,此时需要充分利用测控天线旁瓣覆盖区,通过采用实际天线方向图并经测控链路性能分析,才能开展更为精细的任务分析,支持测控任务的实施。
在仿真分析中,为尽可能跟踪全电推进卫星,并考虑技术经济一体化,分别在亚洲、欧洲和南美洲选择3个典型地面测控站。
图5给出了地面测控站某测控弧段内下行性能实测与本文仿真分析方法结果比对。可以看到:本文仿真分析方法与地面测控站实测结果吻合较好,也证明了该方法在实际应用中的可行性,说明对测控任务分析是具有指导意义的,而两者的差异主要是由测控天线仿真方向图与实测方向图的差异造成的。
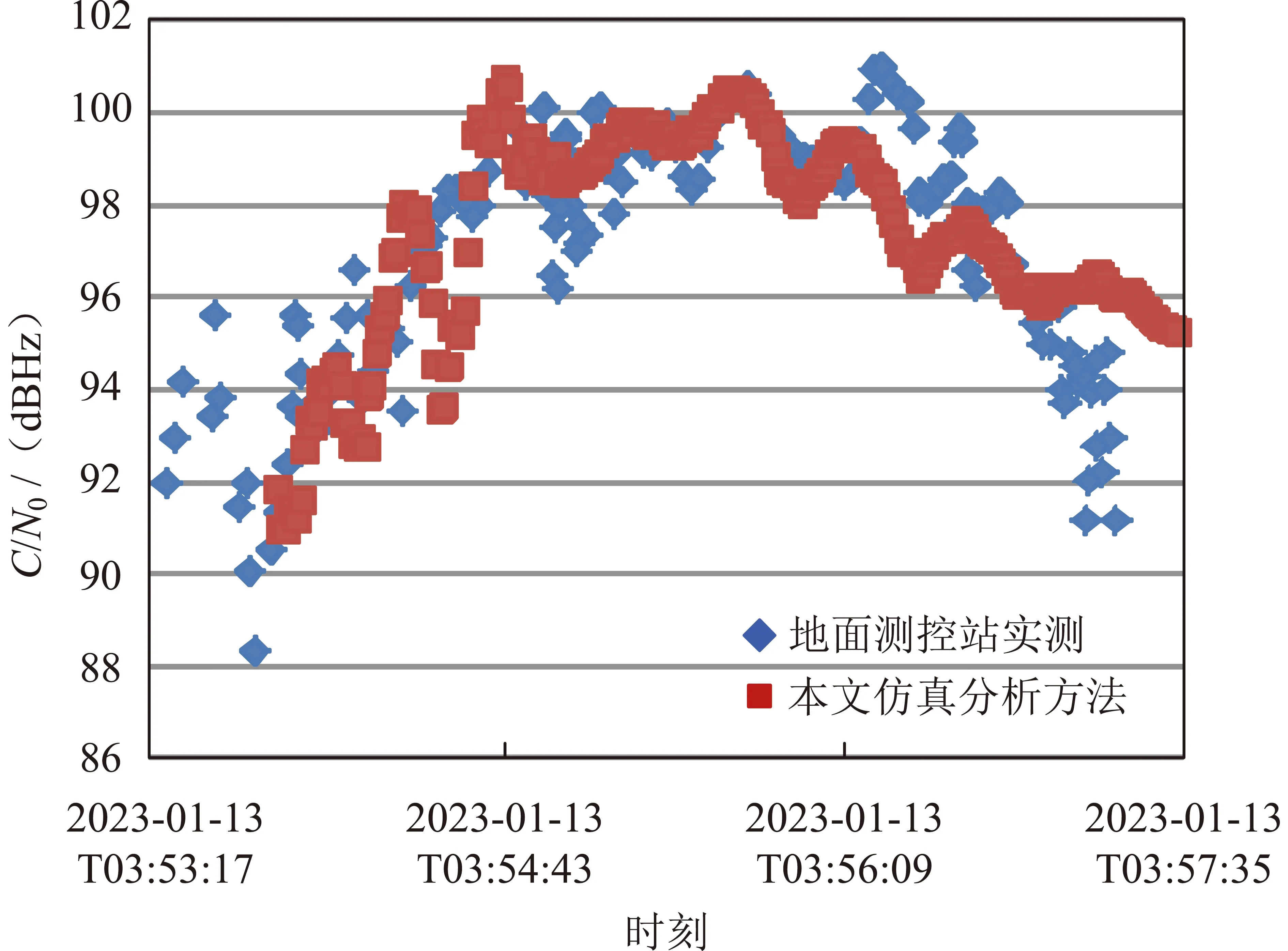
图5 实测数据与本文仿真分析方法结果比对Fig.5 Comparison between actual data and results of simulation analysis method presented in this paper
图6给出了典型仿真结果,横坐标为以卫星发射为0时刻的飞行时长,纵坐标为C/N0。其中:白色色块为利用理论天线视场时地面测控站的可视弧段,黑色色块为利用外部天线方向图时地面测控站的可视弧段,实线为可视弧段内地面测控站接收的C/N0,虚线为地面测控站解调余量为3dB时的C/N0阈值。从仿真结果可以看到:利用外部天线方向图时,地面测控站的可视弧段远大于利用理论天线视场时地面测控站的可视弧段,这对于全电推进卫星这样测控任务复杂的航天器非常有利,因为这样就能留出更多的测控弧段进行测控任务的设计与实施。但是,从图6(b)看到,某些测控弧段虽然地面测控站视距可见卫星,但是通过测控链路计算分析,测控弧段中某些时段链路不可用。因此,在测控任务分析时,这些时段内不设计测控任务,而在实际测控任务执行中,地面测控站也可避免不必要的尝试,从正向设计的角度出发,可以更为科学合理地安排测控任务。
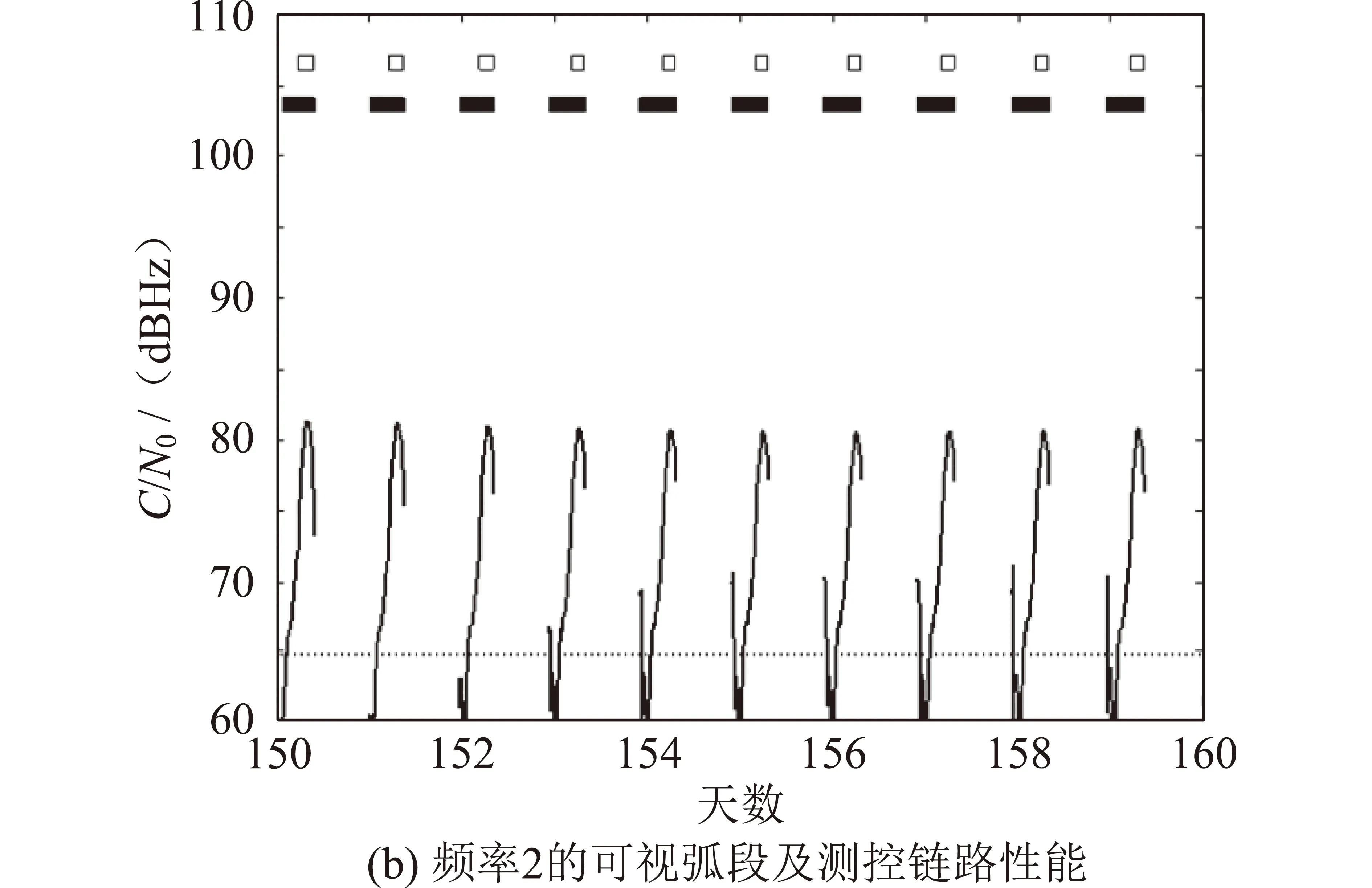
图6 全电推进卫星的典型仿真结果Fig.6 Typical simulation results of all-electric propulsion satellite
表1给出了利用理论天线视场和利用外部天线方向图时地面测控站的可视弧段时长统计,在统计过程中已将地面测控站接收C/N0低于阈值的弧段剔除。从表1中可以看到:利用外部天线方向图所得到可视弧段约为利用理论天线视场所得到可视弧段的1.92倍。由图5的结果可知:测控天线仿真方向图与实测方向图的差异会对实际任务的弧段有一定影响,但不会影响本文仿真方法在实际应用中的效果和对测控任务分析的指导意义。因此,采用本文仿真分析方法可以更为科学有效地利用测控弧段,更为真实地预计实际测控覆盖及卫星姿态变化对测控任务分析造成的影响。

表1 可视弧段时长统计Table 1 Visual radian duration statistics min
3 结束语
全电推进卫星以其高承载比、高性价比在空间技术领域,尤其是在通信卫星上成为发展热点方向。本文提出了一种全电推进卫星测控任务分析方法,在建立测控任务分析场景的基础上,综合考虑卫星姿态、卫星轨迹、实际天线方向图、地面测控站等多重因素,通过动力学和电磁学等多学科耦合仿真手段,能更为真实地预计实际测控覆盖及卫星姿态、实际测控天线方向图变化对测控任务分析造成的影响。在实际工程应用中,本文方法可以较为准确地预测卫星测控可用弧段,为卫星测控任务的有效实施提供重要支撑。
猜你喜欢
上海航天(2024年1期)2024-03-08 02:52:28
电子设计工程(2022年24期)2022-12-23 12:03:28
中国新通信(2022年9期)2022-06-10 02:31:54
光学精密工程(2021年8期)2021-10-04 11:46:28
军民两用技术与产品(2021年5期)2021-07-28 05:54:50
环球时报(2019-09-23)2019-09-23 06:15:25
太空探索(2017年12期)2017-11-30 13:45:33
电源技术(2015年1期)2015-08-22 11:16:20
太空探索(2015年6期)2015-07-12 12:48:42
四川建筑(2015年4期)2015-06-24 14:08:40