
基于改进熵值法的隧道照明环境评价研究
2023-09-09 02:39:48闫自海甘鹏路梁思农
重庆交通大学学报(自然科学版) 2023年7期
闫自海,李 硕,甘鹏路,梁思农
(1. 中国电建集团华东勘察设计研究院有限公司,浙江 杭州 311122; 2. 重庆交通大学 土木工程学院,重庆 400074)
0 引 言
隧道作为交通运输的咽喉,具有缩短里程和提高运输效率的优势,但同时也面临高事故率、高伤亡率的困境[1]。密闭的隧道内视觉参照作用较弱,影响驾驶员安全行驶的因素较多,影响因素主次不明,严重威胁隧道内的行车安全[2]。隧道照明环境是一个人-车-路耦合作用下多因素共同影响的复杂环境,进行隧道内部照明环境评价研究,对改善隧道内部运行环境,提高隧道路段交通安全有重要意义。
隧道的照明空间以及可直接或间接影响照明的各种自然影响因素称为隧道照明环境,研究人员普遍认为,影响隧道照明环境的因素主要包括:交通状况、建筑特性[3]、照明品质与环境污染[4]状况4个方面。
指标权重一直以来是隧道运营环境评估研究的重点。基于层次分析法的指标权重计算方法,实现了隧道运营环境评价由定性到定量的转变[5],将层次分析法权重和熵值法权重加权平均,以确定评价指标的综合权重[6],其同时反映了指标权重计算的主观性和实测数据的客观性,但现有权重计算方法的研究未真正解决主观评价的局限性。
此外,可通过分析驾驶员的视觉特性[7]、生理反应[8]与驾驶行为[9]的变化规律,进行隧道照明环境安全状况评估。但已有研究往往只选择1种或1类指标对驾驶员的生理负荷进行评价,在进行隧道照明环境安全状况评价时无法确定具体指标的影响程度。
综上,针对现阶段隧道照明环境评价方法过分依赖人的主观评价、无法合理反映实测数据本身蕴涵信息的问题。笔者提出了一种基于改进熵值法的隧道照明环境评价方法,根据现场采集的实验数据计算指标权重,进行整体照明环境质量评估,并选取瞳孔面积变化率对评估值进行有效性检验,明确了隧道照明环境各影响因素的影响程度,以期为隧道照明环境的优化和改善提供参考依据。
1 隧道照明环境评价体系的构建
1.1 评价指标的选取
通过综合分析隧道照明环境的影响因素、特点以及近年来的研究成果,可将影响隧道照明环境的因素概括为光源、交通状况、通风条件以及空间通视性4个方面。为客观评价隧道内部照明环境质量,需将影响隧道照明环境的因素进一步细分,从而确定内部照明环境影响因素的具体参数指标。
由于驾驶员在隧道内前进的过程是动态的,从驾驶员视认需求的目的出发,首先应当重视隧道内各照明段的亮度变化,剧烈的亮度变化会对驾驶员的视觉感知造成直接影响,且人工光源的色温会影响驾驶员视觉感受,较好的路面亮度均匀度可减轻视觉疲劳,较高的侧壁亮度增强了视觉诱导性。车流量和车速会影响驾驶员的紧张情绪,烟雾浓度和能见度影响驾驶员的视认距离,隧道的空间通视性决定驾驶员的视野范围。综上,诸多指标均直接或间接造成隧道内的驾驶安全问题,因此将隧道内部照明环境危险程度评价指标细化(表1),其中子指标是依据主指标的内涵确定,各指标的正负属性代表指标对隧道照明环境危险程度的利弊影响,正为有利,负反之。

表1 隧道照明环境危险程度评价指标Table 1 Evaluation indexes of dangerous degree of tunnel lighting environment
隧道内主要依靠人工光源提供照明,选用A1~A3反映隧道内部动态亮度变化情况,A4用于衡量光源的色温,A5衡量路面亮度的均匀性,A6为侧壁亮度。隧道内的交通状况中,B1用于反映隧道内部车辆的通行能力,B2用于衡量隧道交通的服务质量。隧道内的通风条件中,C1用来反映隧道内部光线的穿透能力,C2用于表征驾驶员在隧道内辨认目标的最远距离。隧道的空间通视性,用D1反映密闭的空间对驾驶员视野范围的影响。
1.2 基于改进熵值法的指标权重计算
利用熵值法进行隧道内部照明环境各参数指标权重分析计算时,根据数据携带的信息量大小计算权重,得到客观的指标权重。但是,当某一指标离散程度较大时,该指标权重值会很大,导致该指标主导最后的评价结果。选用改进的熵值计算权重,通过两两指标差异性系数比较的方法,减轻某个指标值离散程度较大时带来的指标权重不合理的问题,具体方法包括:标准化处理、比重计算、信息熵计算、权重计算与危险程度评估值共5个步骤。
选取试验样本的所有评价指标构成初始矩阵X=[Xij],Xij表示第i个样本的第j个指标的数值,其中(i=1,…,n;j=1,…,m)。
1.2.1 标准化处理
为保留原始数据的信息熵,对初始矩阵进行标准化处理,如式(1):
(1)
1.2.2 比重计算
计算第j项指标下第i个参评单元占该指标的比重Yij,如式(2):
(2)
1.2.3 信息熵计算
计算第j项指标的指标信息熵Ej,差异性系数gj,最大差异系数D与映射比率R。
(3)
式中:∂为调整系数,D≤9时∂取最接近D的整数,否则取∂=9。
(∂-1)-1是将D平均分配在1~9标度的映射值上,用D除以∂得到与层次分析法映射值结构相一致的1~9标度的映射值[10]。1~9标度和其映射值间的对应关系如表2。

表2 1~9标度、映射值对照Table 2 1~9 scale and mapping value comparison table
1.2.4 权重计算
根据指标的两两差异性系数比rik构造判断矩阵A,如若rik最接近1~9标度映射值中的6×R5,则指标j与指标k的相对重要性为6,并可得指标k与指标j的相对重要性为1/6。按照层次分析法计算指标权重的方法得到各指标权重ωj。
1.2.5 危险程度评估值
根据ωj计算结果,可得到隧道内部照明环境综合危险程度评估值W为:
(4)
为便于分析,将隧道内部照明环境综合危险程度评估值W进行归一化处理,缩放在[0,1]之间。
1.3 基于BP神经网络的评价模型简化
鉴于隧道内部照明环境综合危险程度评估值W计算的复杂性,在改进熵值法的基础之上,通过BP神经网络对样本数据与估值结果进行迭代运算,得到可简便使用的隧道内部照明环境评价模型。
1.3.1 BP神经网络原理
误差反向传播多层前馈神经网络,又称BP神经网络,能学习和存贮大量的输入-输出模式映射关系,可以解决求解非线性连续函数的多层前馈神经网络权重调整问题。用于隧道内部照明环境质量评价,可通过误差反馈与权重调整,提高隧道内部照明环境评价简化模型计算精度[11]。其拓扑结构模型如图1。
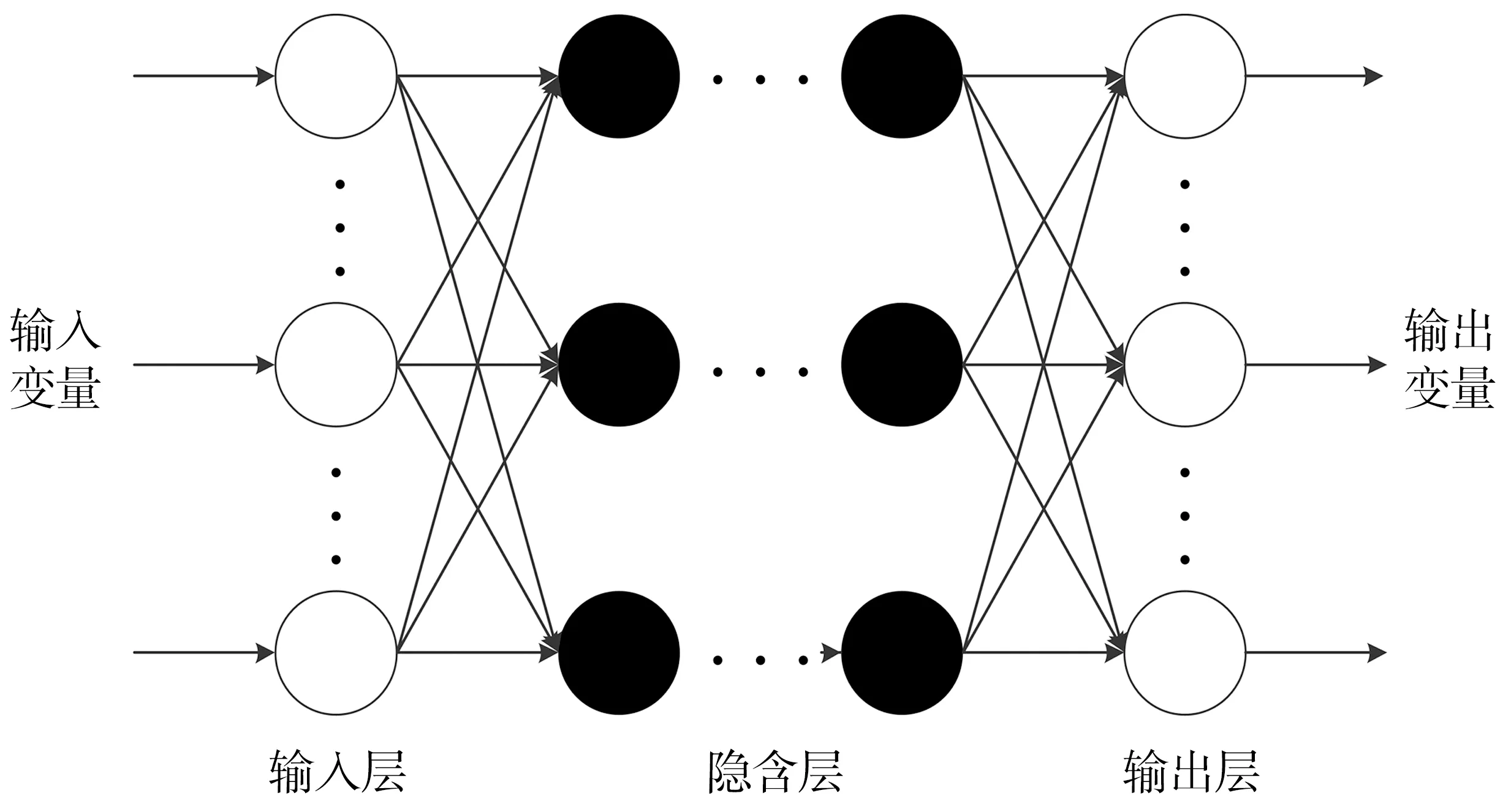
图1 BP神经网络模型Fig.1 BP neural network model
1.3.2 BP神经网络结构
输入层包含影响隧道照明环境的m个输入变量;输出层为隧道内部照明环境综合评估值,即输出层神经元节点数为1;隐含层节点数设为l。
将归一化处理后的各项指标数据输入神经网络,激活函数选用logistic函数,由式(5)得到输入层输出值y。
(5)
式中:ωy为输入层权值;by为输入层阈值。
输出层神经元的传递函数采用线形(purelin)函数,则输出层输出值z如式(6):
z=ωzy+bz
(6)
式中;ωz为输出层权值;bz为输出层阈值。
当取得所有训练样本的输出层输出值后,利用公式(7),判断模型训练精度。
(7)
式中:mj为输出值;zj为实测值。
同时利用梯度下降算法对误差进行反向传播,直至达到目标精度即训练过程结束,计算公式为:
(8)
式中:ωN为各连接层间的权值;bN为各连接层间的阈值;ωN+1为各连接层间的修正后权值;bN+1为各连接层间的修正后阈值;α为网络学习速率;N为修正次数。
1.4 基于聚类分析的照明环境质量评估
为对目标隧道内部照明环境质量的优劣进行整体客观性评估,采用k-means聚类分析对隧道内部照明环境综合危险程度评估值W进行聚类,得到不同等级的取值范围[12],方法为:
指定需要划分的簇的个数k值,从估值W中随机选择k个样本数据作为初始聚类中心si,i=1,…,k,wj为每个样本估值,j=1,…,n,可计算wj到si的距离:
dwx(wi,Si)=(w1-s1)2+(w2-s2)2+…+(wk-sk)2
(9)
计算出所有的样本到各中心点的距离后,将样本分配到距离最近的中心点对应的类别中,再计算每个类别对应的中心点,如式(10):
(10)
式中:s′i是重新聚类后的第i个聚类中心;N′是该聚类中心对应的类别的样本个数。重复上述计算步骤,直到样本估值到聚类中心的距离符合精度要求,迭代结束,可得到各评价等级的取值范围。
2 数据采集与处理
2.1 试验隧道
选取重庆市主城区内7处线性良好、坡度较小、周边环境干扰较小的隧道开展现场试验。每条隧道进行4次数据采集,共计28组样本数据,隧道概况见表3。

表3 试验隧道概况Table 3 Overview of the test tunnel
2.2 试验指标及设备
试验采用高精度雷达测速仪Bushnell 101921、便携式隧道光透过率检测器BN-SDTRA10H、照度计TES 1339R Data Logger Light Meter Pro与分光辐射亮度计PR 655采集隧道内路面亮度、光源显色指数、车流量、车速、能见度、烟雾浓度、与断面尺寸等指标数据。选用德国SMI生产的ETG 2w型便携眼镜式眼动仪采集实车驾驶试验过程中隧道内的驾驶员瞳孔直径数据。
2.3 注意事项与试验流程
为保证测试人员的安全与测试精度,隧道内亮度测试时各照明区段等距布置5个测点,布置测点位置如图2。考虑早晚高峰出行对照明及交通数据的影响,在天气良好的08:00—18:00的时段开展试验,同时测试人员正对车辆行驶方向测量,避免人为因素干扰。在进行隧道内的驾驶员瞳孔直径数据采集时,驾驶员保持自由流车速正常行驶,为了避免驾驶员长时间行驶产生疲劳感,每名驾驶员每次试验至少间隔20 min,试验的主要流程如图3。每次测试完毕后,由驾驶员对本次驾驶体验做出评价,共分为安全、较安全、较危险和非常危险4个评价等级,总计28组统计样本。

图2 隧道内亮度和能见度测试点示意Fig. 2 Schematic diagram of test points for brightness and visibility in the tunnel
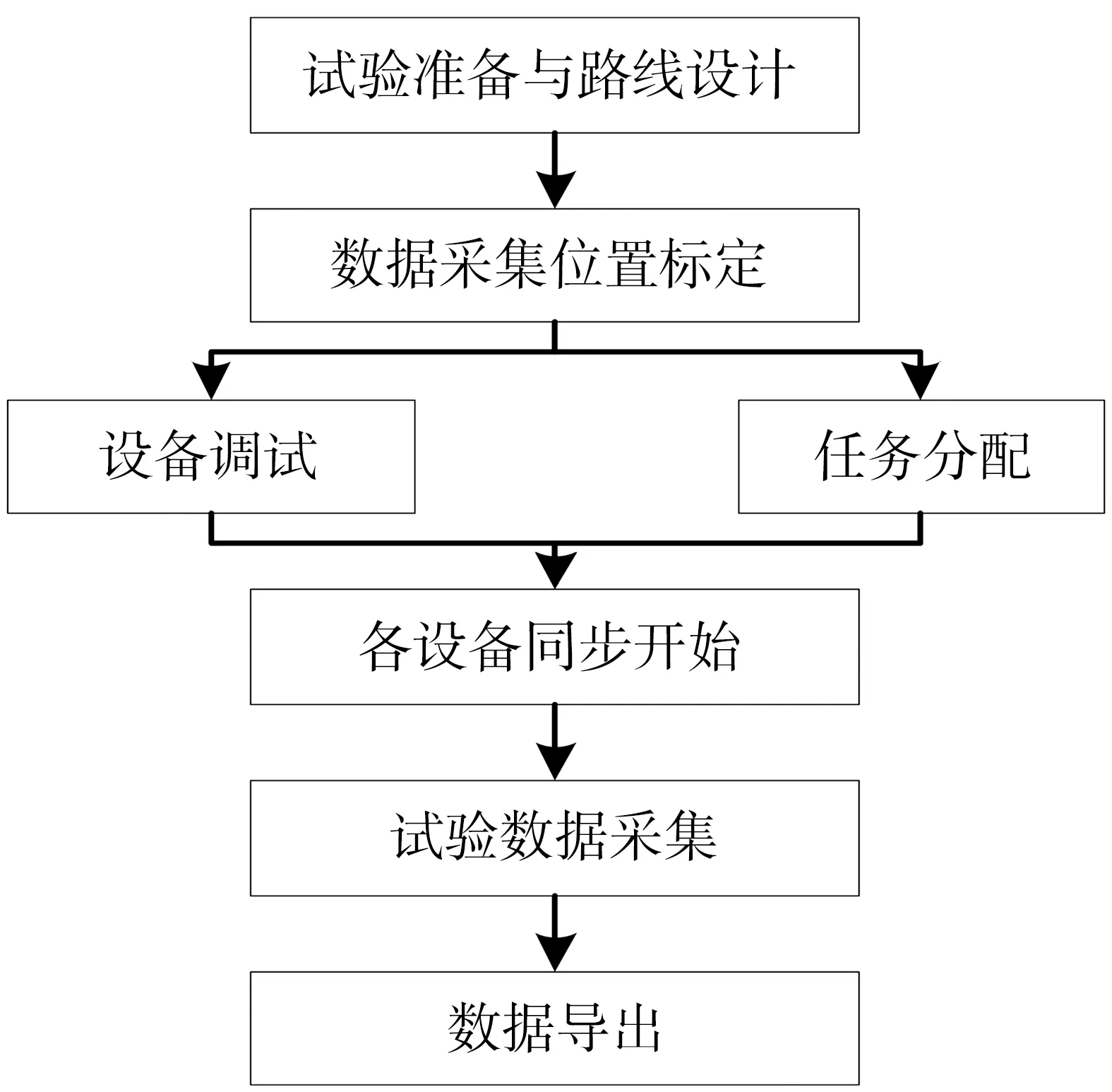
图3 试验流程Fig. 3 Test flow chart
2.4 数据处理
考虑在通车隧道内测试亮度的难度和危险性较大,通过测试隧道路面照度,并根据照度/亮度转换系数得出实测亮度值[13]。驾驶员瞳孔直径数据处理时,前、后每隔1 s提取该时间段内的平均值作为测试值,若该时间段内有数据和平均值之差超过3倍标准差时,需剔除该数据后重新求平均值。
3 隧道内部照明环境评价实例计算
3.1 指标权重计算
基于现场试验采集的指标数据,利用改进的熵值法计算各项指标的权重。根据色温、交通量与能见度等项指标的两两差异性系数比rik构造判断矩阵A为:
(10)
根据计算最大差异系数D=1.035,计算出1~9标度的映射值(表4)以及熵值法改进前后指标权重(表5)。

表4 改进熵值法1~9标度的映射值Table 4 1~9 scale mapping value in improved entropy method

表5 熵值法改进前后评价指标权重Table 5 Evaluation index weight before and after the improvement of entropy method
评价指标权重的排序在算法改进前后基本没生变化,光源与交通环境所占权重分别由40.42%和43.06%变为49.18%和31.73%,改进熵值法权重计算突出光源是影响隧道中间段照明环境的最主要因素,更符合实际的主观期望。究其原因,基于两两差异性系数比rik构造的判断矩阵A保留了熵值法所反映的潜在权重关系,在计算过程中,改善了由于因交通量数据离散程度较大所导致的权重值较大的问题。
由改进熵值法的主指标权重计算结果可知,光源因素所包含的信息量最多,子指标变异程度最大,对隧道照明环境的影响程度最大,包含交通量与车速评价指标的交通环境因素占照明环境影响权重的31.73%;隧道通风条件对照明环境也会产生一定的影响,通风条件因素权重占比为12.95%;而隧道的空间通视条件对照明环境的影响相对较小(对应权重为6.14%)。子指标权重计算排序为:交通量>入口段与过渡段路面平均亮度变化值>中间段与出口段路面平均亮度变化值>过渡段与中间段路面平均亮度变化值>车速>烟雾浓度>断面面积>能见度>路面亮度均匀度>色温>侧壁亮度。
3.2 简化模型计算
为防止数据过度拟合,选取28组样本数据进行BP神经网络的训练测试。基于改进熵值法的权重计算结果,得到隧道内部照明环境综合危险程度评估值W,将所有评价指标数据与评估值代入8:6:1的BP神经网络结构中进行迭代运算(输入层包含8个节点,隐含层包含6个节点,输出层包含1个节点),在训练过程中目标误差设置为10-4,网络学习率为0.01,最大训练步数为1 000。输入和输出的评估值及相对误差百分比如图4。

图4 输入和输出评估值对比Fig. 4 Comparison of input and output evaluation values
由简化模型计算结果可知:7条隧道28组样本估值在模型简化前后计算结果的相对误差百分比在0%~6%之间。28组实验样本中仅有1组样本数据输入和输出的相对误差百分比超过5%,经计算拟合判断系数R2=0.934,即模型精度为93.4%,说明简化模型通过学习自动提取了输出、输出数据间的“合理规则”,基于BP神经网络的内部照明环境评价简化模型计算精度较高。
3.3 质量评估
通过k-means聚类分析,将隧道内部照明环境综合危险程度划分为安全、较安全、较危险、非常危险4个等级,并得到评估输出值W评价等级的取值范围:安全为[0.108,0.199)、较安全为[0.199~0.257)、较危险为[0.257~0.488)、非常危险为[0.488~0.617]。
通过计算每条隧道所有样本的平均评估值,确定试验隧道内部照明环境的危险状态,向黄隧道评估值为0.23,长冲隧道评估值为0.12,真武山隧道评估值为0.49,九龙坡隧道评估值为0.18,石黄隧道评估值为0.20,南山隧道评估值为0.24,慈母山1号隧道评估值为0.27。评估结果表明:长冲隧道内部照明环境相对安全,九龙坡隧道与石黄隧道内部照明环境较为安全,慈母山1号隧道、向黄隧道与南山隧道内部照明环境较为危险,真武山隧道内部照明环境非常危险。
3.4 评估检验
基于改进熵值法的隧道照明环境评价是从驾驶员视认需求角度评估隧道照明环境危险程度,而瞳孔面积变化规律也可在反映隧道内驾驶员的驾驶安全性[26],因此可利用驾驶员在隧道内部的瞳孔面积变化率对评估值进行有效性检验。试验隧道内部照明环境综合危险程度评估值W与驾驶员瞳孔面积变化率对比如图5。

图5 评估值与瞳孔面积变化率对比Fig. 5 Comparison of assessment value and pupil area change rate
由图5可知:试验测试隧道内部驾驶员瞳孔面积变化率的上下四分位数在0~5 mm2/s之间,不同隧道驾驶员瞳孔面积变化率数据总体分布具有显著差异。瞳孔面积变化率可以明显表现驾驶员在行驶过程的生理负荷,在一定程度可以表征不同隧道内行车的危险程度。从采集瞳孔数据处理结果与计算评估值对比可以明显看出,瞳孔面积变化率均值与中位数跟评估值的大小排序基本保持一致,向黄隧道和慈母山1号隧道的结果略有差异,主要是受试验中仪器误差与测量误差的影响,造成了驾驶员瞳孔面积变化结果与评估值计算结果差异性的存在,但不影响整体评估效果。由此可见,评估值W可以在明确具体指标的影响程度的基础上有效评估隧道内部照明环境综合危险程度。
为检验危险程度划分的正确性,统计了每次测试后驾驶员对驾驶体验评价的结果,如表6,表中的数值为驾驶员驾驶体验评价安全、较安全、较危险、非常危险的统计次数。

表6 危险程度驾驶员评价结果Table 6 Driver evaluation results of hazard level
由表6可知:石黄隧道、慈母山1号隧道的4次测试中,各有1次评价结果与3.3节中质量评估结果不一致,28个统计样本中有26个与简化模型计算结果的危险程度相匹配,与改进熵值法对隧道照明环境的质量评估结果相似率达到92.9%,表明了改进熵值法对隧道照明环境质量评估的合理性。因此,结合驾驶员瞳孔面积变化率对评估值的有效性检验,分析发现本文中改进熵值法的隧道照明环境评价方法是合理有效的。
3.5 隧道照明环境改善建议
在对隧道照明环境进行设计时,应充分考虑光源、交通环境、通风条件和空间通视性等物理条件。由于光源和交通环境对隧道照明环境的影响比重分别占49.18%和31.73%,因此更加值得关注。
在运营隧道中应合理调控隧道各区段灯具亮度使得亮度差异变化减小;开启隧道通风系统并及时清理扬尘以获得更佳的能见度;对于交通量较大的隧道,应及时做好交通疏导和引流以保证适宜的交通环境。随着隧道运营智能化程度的提高,笔者所列出的11个影响隧道照明环境的子指标,可作为隧道智能照明监测和控制的主要参数,为今后的照明设计提供主要借鉴。
4 结 论
笔者集合指标选取、权重计算、模型简化与质量评估,构建一套客观的隧道内部照明环境评价体系,为隧道内部的行车安全环境优化及改善提供理论参考,并得到以下结论:
1)从驾驶员视认需求的角度选取照明环境评价指标,真实的反映了隧道照明环境对行车安全的影响。
2)通过改进熵值法计算各参数指标权重,充分利用数据携带的信息量大小计算指标的客观影响程度,结果分析表明,对于照明环境来说,光源是最关键的评价指标,所占权重约49.18%,其次是交通状况、通风条件和空间通视性。
3)将改进熵值法权重计算结果与BP神将网络相结合,得到精度达到93.4%的简化模型,提高了指标综合权重的计算效率。
4)通过聚类分析划分隧道照明环境危险程度等级,并确定评价等级阈值,直观表现目标隧道照明环境质量并反映指标的内在联系。
5)利用瞳孔面积变化率对估值检验,发现试验隧道评估结果与瞳孔面积变化率分布区间的大小排序基本保持一致。
猜你喜欢
军事文摘(2023年20期)2023-10-31 08:42:40
汽车实用技术(2022年14期)2022-07-30 06:13:42
汽车实用技术(2022年4期)2022-03-07 06:07:20
摄影之友(影像视觉)(2019年3期)2019-03-30 01:36:56
青年歌声(2018年2期)2018-10-20 02:02:50
阅读与作文(初中版)(2017年6期)2017-07-05 17:17:15
小天使·六年级语数英综合(2017年5期)2017-05-27 20:14:50
现代工业经济和信息化(2016年19期)2016-05-17 05:38:10
公民与法治(2016年23期)2016-05-17 04:21:08
公民与法治(2016年4期)2016-05-17 04:09:26
