人机共驾模式下的接管义务及其刑事归责
2023-09-06 09:39:14蔡仙
苏州大学学报(法学版) 2023年3期
蔡 仙
一、问题的提出
受自动驾驶技术水平的限制以及出于人类面对技术创新时的审慎态度,在真正的无人驾驶时代来临之前,一段时间内会先经历由驾驶员及自动驾驶系统共同对汽车进行决策和控制的人机共驾时代。根据国际上普遍采用的国际汽车工程师学会发布的SAE J3016标准,L0—L5级自动驾驶中,L3级有条件自动驾驶是以人类为驾驶主体的传统驾驶模式向由系统完成所有驾驶任务的完全自动驾驶模式跨越的分水岭,它是人机共驾模式的一个体现。在这一级别中,自动驾驶过程中,驾驶员仍需要履行警觉/监控义务,并在必要时(系统发出指令或者汽车处于不适合自动驾驶状态下)接管系统,完成动态驾驶任务。刑法上,以接管义务的履行为临界点,对于自动驾驶系统控制汽车过程中所引发的犯罪,遵守规则的驾驶员享有刑事豁免权,其归责对象主要是自动驾驶系统背后对系统的决策、规划、控制等行为起决定作用的研发者、生产者。在驾驶员平稳、安全地接管汽车后发生的事故,则往往会考虑归责于控制汽车的驾驶员。换言之,随着接管的实现,驾驶过程中的危险规避和安全控制义务也发生了转移。
然而,由于对自动驾驶系统的信任、接管时情势的紧迫性、人的认知能力会因参与非驾驶类型任务而降低等因素,驾驶员成功接管汽车并不容易。例如,在2018年3月Uber自动驾驶汽车事故中,多方参与主体都存在过失。其中,运营公司禁用了该测试车前装的前向碰撞预警与紧急制动功能,而安全员因观看手机上的节目,未来得及发现前方违规横穿马路的被害人,以至于未及时接管车辆,引发碰撞事故,致被害人死亡。(1)https://www.cnet.com/tech/tech-industry/ubers-distracted-safety-driver-at-fault-for-fatal-self-driving-car-crash-investigators-say/,2023年3月26日访问。在刑法上针对这一短暂的控制权切换过程中因驾驶员未及时平稳接管汽车所发生的各类交通事故进行归责时,将面临以下不同于对传统交通事故进行归责时的全新课题。
第一,界定接管义务这一新型义务的内容,尤其需要厘清接管义务与驾驶员的警觉义务、监控义务以及自动驾驶系统的最小风险措施义务之间的区别和关联。第二,明确接管义务产生的场景和时间点。即便是当汽车处于不适合自动驾驶状态时,如果驾驶员能够认识到而未认识到该状态以至于未接管汽车,仍有可能构成过失不作为犯。第三,合理判断驾驶员的接管能力。人机互动模式下驾驶员的接管能力会受到多重内外因子的影响,为此,有必要根据人因学原理去判断驾驶员自身的接管能力,并为适应该接管能力而对其他技术参与主体设定相应的注意义务。第四,准确地对过失未履行接管义务而引发交通事故的行为进行归责。具体而言,包括信赖原则对接管义务履行的影响、接管义务违反与其他主体注意义务违反竞合时如何归责等问题。
对上述现实而紧迫的实践问题进行法教义学上的探讨,包括识别和描述这些问题,分析和诠释有关规范(如过失犯、不作为犯规定)的法理以及对上述问题进行判断、提出恰当的处理方式(2)参见舒国滢:《论法学的科学性问题》,载《政法论坛》2022年第1期,第157页。,有利于合理划定人机共驾模式下接管过程中驾驶员与自动驾驶系统之间的权责分配,进而厘清驾驶员接管汽车失败所引发事故的刑事归责依据与标准。而权责分配框架的明确,不仅可以树立民众对自动驾驶技术的信赖和信心,也有助于避免驾驶员滥用自动驾驶系统。随着自动驾驶技术近几年在我国的迅猛发展,我国刑法学界对自动驾驶汽车致损所引发的相关刑事责任问题,予以了重视,并展开了较为全面而深入的研究。(3)参见刘宪权:《涉智能网联汽车犯罪的刑法理论与适用》,载《东方法学》2022年第1期;付玉明:《自动驾驶汽车事故的刑事归责与教义展开》,载《法学》2020年第9期;彭文华:《自动驾驶车辆犯罪的注意义务》,载《政治与法律》2018年第5期;龙敏:《自动驾驶交通肇事刑事责任的认定与分配》,载《华东政法大学学报》2018年第6期;焦孟頔:《半自动驾驶车辆交通事故的刑事责任》,载《法学》2022年第9期。其中,也有学者对人机共驾中的掌控悖论、驾驶员的接管能力进行了富有启发的开创性研究。(4)参见皮勇:《论自动驾驶汽车生产者的刑事责任》,载《比较法研究》2022年第1期;王莹:《法律如何可能——自动驾驶技术风险场景之法律透视》,载《法制与社会发展》2019年第6期。但是,单独就人机共驾模式下驾驶员违反接管义务时应如何刑事归责这一细小问题展开的系统性研究并不多见。本文正是着眼于此,以德国、英国等国自动驾驶的立法实践与经验为镜鉴,在我国现有的研究成果基础之上,对该主题进行法理上的探究。
二、人机共驾模式下接管义务的基本内涵
(一)接管义务的概念界定
2020年联合国欧洲经济委员会“世界车辆法规协调论坛”(WP. 29)针对L3级自动化驾驶制定了第一个具有约束力的国际法规《车道自动保持系统(ALKS)条例》。(5)UN Regulation 157 on uniform provisions concerning the approval of vehicles with regard to Automated Lane Keeping Systems E/ECE/TRANS/505/Rev.3/Add.156 (ALKS Regulation), para 2.2.根据该条例第2.2条对“接管请求”的定义,“接管”是指汽车的动态驾驶任务(6)动态驾驶任务(dynamic driving task, DDT)是指,除策略性功能(行程规划、目的地和路径的选择等)外,完成车辆驾驶所需的感知、决策和执行等行为。从系统(自动控制)转移到由人类驾驶员执行(手动控制)的逻辑上的直观过程。而根据我国2022年3月1日正式实施的《汽车驾驶自动化分级》第2.14条,“接管”是指动态驾驶任务后援用户响应介入请求,从驾驶自动化系统获得车辆驾驶权的行为。该条不同于《车道自动保持系统条例》对接管内涵的界定之处在于,其描绘了一种具体的接管场景,即“响应(系统的)介入请求”。但实际上,该定义缺乏完备性,因为接管的场景并不限于上述一种。另外,综合上述定义可知,“接管”这一概念既可以指涉汽车的控制权由自动驾驶系统向驾驶人切换的一个过程(即接管过程),也可以指涉驾驶员获得车辆控制权同时系统释放控制权这一时刻的反应动作(即接管行为)。接管过程,也被称为“控制权切换过程”(见图1),通常是指系统将全部控制权移交给驾驶员的全过程,它包括驾驶员对情境的认知以及在此基础上做出的决策与反应。(7)图文参见吴超仲、吴浩然等:《人机共驾智能汽车的控制权切换与安全性综述》,载《交通运输工程学报》2018年第6期,第134页。在系统发出接管请求场景下,接管时间是从请求发出时刻开始到驾驶员平稳、顺利接管之时。在此过程中发生的人员伤亡事故,都可能成为刑法上评价的对象,也是本文要研究的场景。当然,平稳、顺利接管汽车的时间点并没有那么明确,因为在驾驶员获得控制权而执行动态驾驶任务的短暂时间内,很可能因情况的紧迫性,依然未能避免事故的发生。此时,也不能认为驾驶员成功接管汽车。
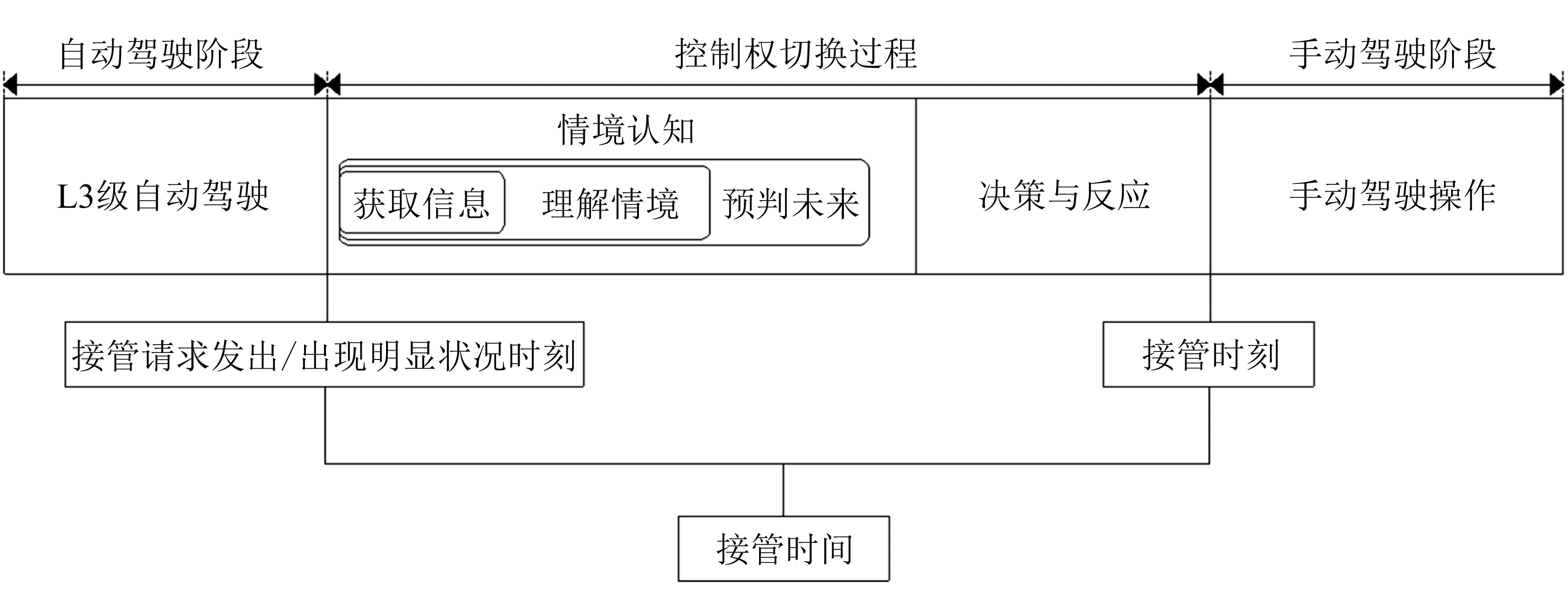
图1 控制权切换过程
值得注意的是,上述对“接管”的界定仅具备事实描述性和技术性。事实上,在L3和L4级自动驾驶中都会出现驾驶员的接管行为。国际SAE J3016标准以及我国自动驾驶分级标准分别作为推荐性国际和国家标准,一般性地规定了L3级自动驾驶中驾驶员在收到介入请求或者发现车辆其他系统失效时,以适当方式及时地接管。而对于L4级自动驾驶,当系统发出介入请求时,用户可不作响应,由系统自动执行最小风险状态,用户的接管只是作为一种冗余策略而存在。至于在哪一自动驾驶级别中“接管”会成为驾驶员在特定时刻应履行的一个强制性义务,取决于各国在诸如《道路交通法》等相关法律中的规定。
以德国为例,虽然形式上德国自动驾驶立法基本采纳了国际SAE J3016分级标准(8)只是L0—L5级中每一级别的表述与SAE J3016标准不同而已。Vgl. Bundesministerium für Verkehr und digitale Infrastruktur, Bericht der Ethik-Kommission Automatisiertes und Vernetztes Fahren, Berlin: 2017, S. 14.,在2017年修改《道路交通法》时规定了L3级自动驾驶中驾驶员作为后备,在特定情形下应当履行接管义务。而L4级自动驾驶本来应当与L3级自动驾驶相区分,以至于在整个驾驶过程中安排驾驶员并不是必要的。但是,为了确保与现行《国际道路交通公约》接轨而引入一名责任人,德国2021年出台的《自动驾驶法案》第1f条规定了在L4级自动驾驶中必须有一名自然人作为技术监督员(technische Aufsicht)(无论是在车内还是车外)。①(9)①Vgl. Entwurf eines Gesetzes zur nderung des Straßenverkehrsgesetzes und des Pflichtversicherungsgesetzes- Gesetz zum autonomen Fahren, Drucksache 19/27439, 09.03.2021, S. 20, 23.而该技术监督员需要在特殊情况下接管汽车,关闭自动驾驶功能,或采取必要的安全措施。实际上,在场的技术监督员和驾驶员没有区别,因为技术监督员也实时、有效地对汽车的行驶进行了控制。(10)Vgl. Sophie Gatzke, Gesetz zum autonomen Fahren-Ist die externe Überwachung autonomer Fahrsysteme mit dem Wiener Übereinkommen über den Straßenverkehr vereinbar? Neue Zeitschrift für Verkehrsrecht, Vol. 34, No. 8, 2021, S. 406. 叶强:《德国自动驾驶立法评析》,载《国外社会科学》2022年第2期,第84页。类似地,我国对有条件自动驾驶、高度自动驾驶智能网联汽车予以规制的地方性法规,也未通过驾驶员接管义务的有无来具体区分L3和L4两个自动驾驶级别。例如,2022年7月出台的《深圳经济特区智能网联汽车管理条例》第35条规定,有条件自动驾驶和高度自动驾驶的智能网联汽车在自动驾驶模式下行驶时,驾驶人应当处于车辆驾驶座位上,监控车辆运行状态和周围环境,随时准备接管车辆;智能网联汽车发出接管请求或者处于不适合自动驾驶的状态时,驾驶人应当立即接管车辆。
但是,正如有的学者所批判的,无论是德国自动驾驶立法还是我国的地方性立法,虽然引入了L4级自动驾驶技术,但L4级中驾驶员行为规范及权利义务模式仍然停留在L3级,这会导致技术与法律某种程度上的脱节。一方面,由于L4级自动驾驶中往往会规定系统的最小风险控制义务,因此,在紧急情况下,上述立法模式下会出现L4级中驾驶员的接管义务和系统的最小风险控制义务之间的权限重叠问题。另一方面,本来在L4级自动驾驶中汽车生产者应当承担更重的注意义务与责任。(11)参见王莹:《自动驾驶法律准入问题研究:路线、挑战与方案》,载《中国人民大学学报》2021年第6期,第153页。但是,在上述立法模式下,由于L4级自动驾驶中驾驶员仍然需要应对系统的接管要求,因而,如果消费者作为驾驶员的话,该级别自动驾驶并没有提高其驾驶舒适度。在德国语境下,如果消费者只是作为车主而非驾驶员(技术监督员)的话,甚至会出现生产者、技术监督员和车主之间的责任分工不清楚的问题。针对这一问题,德国消费者保护协会曾建议将私人车主排除出自动驾驶的立法范围。(12)Vgl. Tino Haupt, Das Gesetz zum autonomen Fahren- Auswirkungen für Verbraucher und Anregungen für den Gesetzgeber, Neue Zeitschrift für Verkehrsrecht, Vol. 35, No. 6, 2022, S. 265.而在未来我国《道路交通法》围绕自动驾驶进行修法时,也有必要考虑区分L3级和L4级自动驾驶中驾驶员的权利义务内容,并取消L4级自动驾驶中驾驶员的接管义务。
(二)接管义务产生的具体情形
自动驾驶场合,驾驶员可以在非紧急状态下主动选择关闭自动驾驶系统。不过,在自动驾驶立法中,产生接管义务的情形通常包括系统提出接管要求以及驾驶员发现车辆处于不适合自动驾驶的状态这两种。在法理上澄清接管义务产生的两种具体情形也是合理地对因接管失败引发事故进行刑事归责的一个前提条件。
1.情形一:汽车发出接管要求时
汽车向驾驶员发出接管请求,是驾驶员需要接管汽车的第一种情形。自动驾驶系统向驾驶员发起接管要求主要会在以下情境中发生:第一,计划事件;第二,非计划事件,如道路作业、恶劣天气、缺少车道标记等事件;第三,驾驶员不可适用性,如系统识别出驾驶员未处于响应接管请求的适当驾驶位置;第四,驾驶员未在场或解开安全带;第五,系统错误,如电子故障或传感器故障。(13)N Kinnear and others, Safe performance of other activities in conditionally automated vehicles (TRL, December 2020), published as Appendix A to Department for Transport, Safe Use of Automated Lane Keeping System (ALKS): Summary of Reponses and Next Steps (April 2021), p. 7.当然,上述情境是由自动驾驶系统进行监测,并发出接管命令。如果出现了上述情境,但系统由于自身缺陷未识别出来,而这些情形又不属于驾驶员需要察觉的显著情形,那么,事故发生后的刑事归责应围绕汽车或者系统的生产者、销售者展开。
2.情形二:发现汽车处于不适合自动驾驶的状态
关于第二种接管情形,德国2017年《道路交通法》第1b条规定了,认识到或者基于明显的状况应该认识到自动驾驶功能已不存在按规定使用的条件时,有义务立即接管机动车的操控。而2022年施行的《上海市智能网联汽车测试与应用管理办法》规定,当发现车辆处于不适合自动驾驶的状态时,驾驶人应当立即接管车辆。可见,德国《道路交通法》除了要求驾驶员明确认识到汽车处于不适合自动驾驶的状态时接管车辆,还要求驾驶员基于明显状态应当认识到上述状况时接管车辆。那么,“基于明显的状态应当认识”是指驾驶员保持警觉并在明显状况下本应识别出汽车不适合自动驾驶而没有识别到,还是指根据客观上的证据,即明显的状态如刺耳的警报声,推定出行为人已经认识到了汽车不适合自动驾驶?(14)这一争议类似于我国2013年《关于依法惩治性侵害未成年人犯罪的意见》中第19条的规定所引发学界的讨论。该条规定,知道或者应当知道对方是不满十四周岁的幼女,而实施奸淫等性侵害行为的,应当认定行为人“明知”对方是幼女。后一种解读其实也是要求驾驶员对接管情形有事实上的认识,只不过根据司法推定的方法去认定其主观心理。这样一来,德国《道路交通法》的规定与我国上海市的规定无本质差别。不过,德国学者多采纳第一种解读,并指出,从法律规制的效果出发,“基于明显的状态应当认识汽车处于不适合自动驾驶状态”的这一规定是有意义的,因为从一个中立的观察者视角来看,应当接管的情形很容易识别,然而,驾驶员没有意识到该情形,那么,驾驶员违反了谨慎义务,可以予以归责。(15)Vgl. Carsten König, Gesetzgeber ebnet Weg für automatisiertes Fahren- weitgehend gelungen, Neue Zeitschrift für Verkehrsrecht, Vol. 30, No.6, 2017, S. 251.另外,第一种理解虽然对驾驶员提出了更高的谨慎要求,但某种程度上也有利于防止驾驶员以自己没有认识到接管情形为借口来逃脱自己的责任,因此,这种解读更具有合理性。
不过,德国《道路交通法》中这一引导驾驶员行为的法律条款会面临一个欠缺明确性的质疑,即“不存在按规定使用的条件”“明显的状况”这些表述太过模糊,驾驶员如何知道和识别自动驾驶系统不再“正常使用”?对此问题,德国立法理由指出,高度和完全自动驾驶功能的“按规定使用”取决于预定用途和自动化程度。车辆驾驶员必须掌握并特别遵守系统说明中的规定,以便在出现汽车处于不适合自动驾驶的明显情况,例如,车辆发生技术故障(系统发出接管要求这一警告之外的汽车警告)或者行进过程出现故障(轮胎破裂)时,即使车辆没有要求驾驶员接管,驾驶员也可以决定是否接管车辆。(16)Vgl. Entwurf eines ... Gesetzes zur nderung des Straßenverkehrsgesetzes, Drucksache 18/11300, 20.02.2017, S. 20 ff.另外,考虑到制造商在掌握先进自动驾驶技术方面的优势以及技术不断发展的趋势,法律更应该在事前对制造商的系统说明从标准化、合理性和公平性等几个方面进行实质性的审查,而非直接替代制造商去具体规定预定用途以及明显状况的类型。而“明显的状态”,通常是指那些即使驾驶员远离车辆控制和交通环境也能基于常识认识到的情形,如其他车辆的(可能是重复的)鸣笛或系统在没有外部原因的情况下紧急制动。(17)Vgl. Carsten König, Gesetzgeber ebnet Weg für automatisiertes Fahren- weitgehend gelungen, Neue Zeitschrift für Verkehrsrecht, Vol. 30, No.6, 2017, S. 251.
(三)接管义务与相关义务的关系
1.接管义务与警觉、监控义务
自动驾驶的相关立法往往同时规定接管义务和警觉、监控义务。例如,德国2017年的《道路交通法》中第1b条规定,L3级自动驾驶中,驾驶员应随时保持警觉状态,并在(1)应自动驾驶系统的要求,或者(2)认识到或者基于明显的状况应该认识到自动驾驶功能已不存在按规定使用的条件时,有义务立即接管机动车的操控。我国《深圳经济特区智能网联汽车管理条例》第35条同时规定了监控车辆运行状态和周围环境的义务和接管义务。为此,我国有的学者将警觉义务和接管义务视为一个“防止自动驾驶汽车引起交通事故的警觉接管义务”(18)参见皮勇:《论自动驾驶汽车生产者的刑事责任》,载《比较法研究》2022年第1期,第62页。。从发生学角度来看,驾驶员在紧急情况下及时地接管车辆是以其履行警觉、监控义务为前提,并且避免交通事故的发生也同时需要驾驶员的警觉、监控和接管。不过,由于警觉、监控和接管行为发生的时间段及内涵不同,因此,还是有必要对二者予以区分。警觉、监控义务是指驾驶员在自动驾驶系统执行动态驾驶任务期间保持一定的警觉或者对周围环境、汽车状况予以观察,从而可以对明显的外部刺激进行适当响应的义务。而接管义务是指驾驶员在接到系统接管要求或发现车辆系统失效后,将车辆的控制权转移到自己手中的义务。
另外,L3级自动驾驶中警觉义务和监控义务的内容也是有实质区别的。法律到底规定二者中的哪一个义务,通常会对接管的实现产生影响。根据心理学上将注意分为无意注意和有意注意的分类法,警觉更接近无意注意,监控更接近有意注意。保持警觉时,驾驶员可以摆脱交通情境和车辆控制,而不需要在从事非驾驶类活动(如查看邮件)时有目的性地、在意志上努力地去观察周围的驾驶环境以及汽车运行状况,但仍然可以期待驾驶员在受到外在环境的明显刺激时及时接管汽车。监控则需要驾驶员有目的性地努力观察车辆内外的情形,为此,会极大地压缩驾驶员从事非驾驶类活动的时间和精力。不同的自动驾驶立法在L3级中是规定警觉义务还是监控义务也不同。例如,德国《道路交通法》规定的是警觉义务,英国的相关立法也倾向于规定警觉义务(19)Law Commission of England and Wales, Scottish Law Commission, Automated Vehicles: joint report, printed on 25 January 2022, p. 38.。而我国上海、深圳以及美国的加利福尼亚州(20)California Vehicle Code, Sec. 38750, (b)(2).等地方规定的是驾驶员的监控义务。在L3级自动驾驶中,对驾驶员注意义务的设定不能仅考虑驾驶安全而忽略自动化技术等级及其发展的初衷,为此,在该级别下规定驾驶员的警觉义务更为恰当。
2.接管义务与最小风险管理义务
国际SAE J3016标准和我国自动驾驶分级标准在L3—L5级自动驾驶中都规定了,用户在发生系统故障或外部事件的情形下未响应介入请求(执行接管)时,系统执行风险减缓策略并达到最小风险状态。最小风险状态(minimal risk manoeuvre)是指车辆处于事故风险可接受的状态。风险减缓策略(risk mitigation manoeuvre)往往包括开启危险警示灯、行驶至不妨碍交通的地方停放或者采取降低速度、远程接管等有效降低运行风险的措施。不同于接管义务,履行最小风险管理义务的主体是系统,更准确的是该系统背后的生产者、设计者。
从技术层面来看,系统执行最小风险管理义务属于一个冗余设计,以防止用户未能接管汽车后发生事故。然而,如果相关立法遵循自动驾驶技术级别上的区分,仅在L3级自动驾驶中规定接管义务,那么,相应的,L4级自动驾驶中驾驶员的接管应该不是强制性义务,而系统执行最小风险管理措施应被规定为一种义务。实践中,L3级自动驾驶中驾驶员的接管属于法定义务,至于系统是否需要履行最小风险管理义务,取决于各国实际立法。譬如,《深圳经济特区智能网联汽车管理条例》第35条针对L3和L4级自动驾驶规定了驾驶人的接管义务,但是未规定系统的最小风险管理义务。而德国2017年《道路交通法》仅规定了L3级自动驾驶中驾驶员的接管义务,2021年《自动驾驶法案》则规定了L4级中技术监督员的监督和接管义务,以及系统的最小风险管理义务。上述对驾驶员、系统设定的不同义务,会对自动驾驶致损后的刑事归责产生一定影响。譬如,根据深圳市自动驾驶立法,紧急情况下,驾驶员和系统的权责不会重叠,在事故发生之后也不会出现责任主体不明的问题。但与此同时,最小风险管理作为一个出于安全考虑的冗余设计不再被法律强制执行,可能会影响汽车的驾驶安全。而在德国立法背景下,L4级自动驾驶中,如果由于技术监督员未履行接管义务以及系统未履行最小风险管理义务而引发交通事故的话,会涉及注意义务违反的竞合这一复杂情形下的归责问题。
三、人机共驾模式下接管义务的实现机制
(一)接管义务实现机制对刑事归责的影响
在系统发出接管要求或者驾驶员发现汽车处于不适宜自动驾驶的状况之后,驾驶员通过接管汽车,身心重新投入到驾驶任务中,实现汽车控制权的切换。这个切换过程对汽车行驶速度和轨迹有着直接影响,并进而关系到行驶安全。如上文所示,这个切换过程包含了以下不具有必然排他性的步骤:第一,对视觉、听觉和振动触觉刺激的感知(要求接管的警告或明显状况);第二,信息的认知处理;第三,反应选择(决策);第四,准备就绪(重新定位手脚);第五,接管动作(转向、加速、刹车)。(21)N Kinnear and others, Safe performance of other activities in conditionally automated vehicles (TRL, December 2020), published as Appendix A to Department for Transport, Safe Use of Automated Lane Keeping System (ALKS): Summary of Reponses and Next Steps (April 2021).然而,L3级自动驾驶模式下,驾驶员要在短暂时间内顺利完成上述步骤并成功接管车辆并不容易。这一过程“犹如从快要昏倒的马车夫手中接过险境中马车的缰绳”,对驾驶人员避免交通事故的能力提出了更高的要求。(22)参见皮勇:《论自动驾驶汽车生产者的刑事责任》,载《比较法研究》2022年第1期,第63页。因为整个接管过程会受到各种情景变量(如交通复杂性、接管要求警告、人机交互界面设计、非驾驶类任务等)、个体变量(如年龄、经验和技能等因素)以及二者相互作用的影响。为此,针对自动驾驶系统发出接管请求这一情形,2021年联合国欧洲经济委员会“全球道路交通安全论坛”(WP.1)围绕着自动驾驶系统发出接管要求方面、驾驶员以及自动驾驶系统制造商和配备自动驾驶系统的车辆制造商、缔约国等主体的注意义务提出了详细的规制建议,以确保接管过程的安全。(23)Global Forum for Road Traffic Safety (WP.1) resolution on safety considerations for activities other than driving undertaken by drivers when automated driving systems issuing transition demands exercise dynamic control, eighty-fifth session, September 2021.
既然驾驶员成功接管汽车受诸多因素影响,那么,在自动驾驶场合设定各主体注意义务以及对因接管失败引发的事故进行刑事归责之前,首先有必要结合人因学、交通心理学等其他学科的知识,澄清接管义务实现的具体机制。在事前义务设定上,这些专业知识不仅有助于判断驾驶员本身的行为能力,还对自动驾驶系统发出警告的形式、人机交互界面的设计等驾驶员以外与其互动的因子提出了要求,即对这些具有可塑性的情境变量的设计应有助于驾驶人员实现接管义务。在事后归责上,如果由于驾驶员在紧急情况下接管失败导致人员伤亡事故的发生,能否对驾驶员进行刑法上的归责?一方面,需考虑驾驶员在这种紧急情形下是否具备接管的能力,因为“逾越能力则无义务”,具体情境下要求驾驶员履行接管义务是以其具备接管能力为前提的。另一方面,既然接管的实现是驾驶员、系统甚至基础设施配合完成的,那么,接管失败后的刑事归责还得首先明确此过程中各参与主体的注意义务及其违反情况。在有的情况下,可能是驾驶员以外的参与主体违反相关义务,导致驾驶员未能成功接管。也有可能是驾驶员和其他参与主体同时违背了各自应当履行的注意义务,此时便会涉及过失竞合的刑事责任认定。
(二)驾驶员的接管能力及其判断
现有研究发现,自动驾驶级别越高,驾驶员集中在环境监视和系统操作上的注意力就越少,接管汽车的能力也越差。通常,驾驶员的接管能力可以体现在总的接管时间上,即驾驶员在紧急事件发生或者收到接管要求到完全控制汽车的时间,它包括了反应时间和进行接管操作的时间。其中,反应时间是指从系统发出接管请求到驾驶人第一次注视前方或接触方向盘的时间。而接管操作时间是指从系统发出接管请求到驾驶人操作方向盘或踏板实现手动驾驶的时间。(24)参见吴超仲、吴浩然等:《人机共驾智能汽车的控制权切换与安全性综述》,载《交通运输工程学报》2018年第6期,第135-136页。如果按照技术级别的设定,L4—L5级自动驾驶中用户无须对汽车进行接管,为此,真正面临挑战的是L3级人机共驾模式中驾驶员的接管能力。
与传统驾驶相比,L3级自动驾驶中驾驶员不仅要理解系统的功能、运行边界,还要关注系统状态、导航、周围车辆运动状态等信息。而且基于对自动化的信任,自动驾驶过程中驾驶员会因从事非驾驶类活动,导致情境感知能力的降低。这种较低的认知水平紧接着会影响驾驶员反应能力,使得反应时间和接管操作时间变长。另外,非驾驶类活动的类型,包括非驾驶类活动是否有视觉参与以及是否需要使用手持装置,也会对接管时间产生影响。不过,当下没有明确、直接的证据表明,在L3级自动驾驶中驾驶员从事哪些非驾驶类活动是安全的或者是不安全的。原则上,被允许的非驾驶类活动应当不会对安全地恢复汽车控制而言有实质性的损害。因此,离开驾驶位或者睡觉是绝对不被允许的。如果一些非驾驶类活动是被未来立法所允许的,如看电影、处理电子邮件等,那么,判断驾驶员接管能力时需要将其从事的非驾驶类活动视为一个被允许存在的情境因素予以考虑。在面临的驾驶负荷上,当汽车处于自动驾驶状态时,驾驶员被允许不实时监测车外环境,脑力和认知负荷则处在较低水平。而在突发或复杂情况下,当驾驶员突然被要求接管车辆控制时,脑力和认知负荷需求激增,这种从极低到极高程度跳跃的驾驶负荷特性直接影响着切换过程的安全性。(25)参见吴超仲、吴浩然等:《人机共驾智能汽车的控制权切换与安全性综述》,载《交通运输工程学报》2018年第6期,第134-136页。
不过,驾驶员事前对系统的使用范围及其局限性的认知,以及驾驶自动驾驶汽车经验的增加,会改善接管效果。这也是自动驾驶立法过程中需要考虑的因素,尤其是要对驾驶员使用自动驾驶汽车进行培训和测试,确保驾驶员将相关系统说明的知识内化吸收,并获取使用自动驾驶汽车所需的技能。有研究发现,驾驶员在接管后,会立即出现汽车的纵向和横向不稳定性问题。但是,随着驾驶经验的增加,驾驶员接管的效果会改善。这是因为,反映驾驶员对系统目的和功能的理解状况的心理模式会影响接管效果。心理模型是通过经验发展起来的,并通过许多情境模型建立起来的,即在不同环境中使用系统。因此心理模型也会不断更新。驾驶员心理模型的不匹配或不准确(即对系统的功能和局限性的认识)可能导致错误,影响驾驶安全。为此,让驾驶员进行操作程序方面的行为训练,相较于只提供用户一个用户手册更加有效,前者使得用户在自动驾驶过程中可以进行更多的镜像检查(mirror checks),更有可能注意到接管过程中的危险。(26)N Kinnear and others, Safe performance of other activities in conditionally automated vehicles (TRL, December 2020), published as Appendix A to Department for Transport, Safe Use of Automated Lane Keeping System (ALKS): Summary of Reponses and Next Steps (April 2021).
虽然在法律上明确系统应当给驾驶员提供多久接管时间极为重要,以便驾驶员最晚可以在该时间结束时执行动态驾驶任务。但是,由于该时间的长短取决于上文提及的多个因素,因此,在该问题上也没有形成一个通行的国际标准。而具体案件中要判断驾驶员是否在紧急情况下有接管汽车的能力,可以参考三个时间变量:紧急情况发生后多长时间内接管汽车可以避免事故的时间(即避免事故的时间)、在当时情形下系统提供给驾驶员的接管时间(即系统提供的时间)以及一个理性的驾驶员处于当时驾驶员的位置并从事被允许的非驾驶类活动时需要多长时间接管汽车(即驾驶员所需接管时间)。当由于驾驶员在紧急情况下未能及时接管汽车导致事故发生时,要判断驾驶员是否具有接管能力,可以借助司法实践中经常运用到的模拟侦查实验来进行。如果系统提供的时间和一个理性的驾驶员所需接管时间长于避免事故的时间,那么,这便意味着情况过于紧急,以至于驾驶员根本没有适时、安全接管汽车的能力。如果一个理性的驾驶员所需接管时间少于避免事故的时间,但长于系统提供的时间,那么此时便是系统提供的时间过短,使得驾驶员也没有能力接管汽车。但是,如果系统提供的时间充足,一个理性的驾驶员所需接管汽车的时间也少于避免事故的时间,则可以认为,驾驶员具备接管汽车的能力。当然,时间是否充足只是判断驾驶员是否具有接管能力的一个关键指标,在具体案件中可能还需要考虑驾驶员的身体状况等特殊因素。
(三)其他技术参与主体的义务设定
人机交互模式下驾驶员成功接管汽车,不仅仅需要人来适应自动驾驶系统,也需要系统来适应人。为此,应考虑当前自动驾驶技术发展水平下系统所具备的能力,来明确投入市场的自动驾驶技术应满足何种最低技术功能。如果系统没有达到这一最低要求,那么,配备该系统的汽车就不应被授权为自动驾驶汽车。这也是为自动驾驶系统制造商和配备自动驾驶系统的汽车制造商设定了与当前自动驾驶技术水平相匹配的系列义务。
国际上,一般从以下五个方面对发出接管命令的自动驾驶系统提出要求:第一,接管指令发出的形式。英国2022年1月出台的《自动驾驶汽车:联合报告》指出,接管指令应该是清晰、多感官的,除了视觉和声音警报外,还包括振动等触觉信号。尤为重要的是,该指令应当设计成能被所有允许驾驶的人都可以感受到,即便是那些患有严重听力障碍、先天性耳聋、听觉受损的人。(27)Law Commission of England and Wales, Scottish Law Commission, Automated Vehicles: joint report, printed on 25 January 2022, p. 30.另外,这些警告也应该是逐渐加强的。第二,接管要求发出的时间。作为反应时间和接管时间的计时起点,接管请求的发送时机也是决定控制权能否安全平稳切换的一个重要因素。这个接管指令发出的时间并不是越早越好,因为在没有视觉反馈时发出接管要求会被认为是虚警,甚至会引发敏感驾驶人不适当的刹车反应,最终导致人对系统不再信任,引发更危险的后果。(28)参见吴超仲、吴浩然等:《人机共驾智能汽车的控制权切换与安全性综述》,载《交通运输工程学报》2018年第6期,第137页。因此,联合国欧洲经济委员会“全球道路交通安全论坛”(WP.1)建议,系统应当在适当时间、有效地发出接管要求,使得有足够的前置时间让驾驶员安全地进行动态控制。(29)Global Forum for Road Traffic Safety (WP.1) resolution on safety considerations for activities other than driving undertaken by drivers when automated driving systems issuing transition demands exercise dynamic control, eighty-fifth session, September 2021.第三,接管要求发出后一段时间内自动驾驶系统保持对车辆的控制。这也是为了给予驾驶员在接管汽车之前有充分的时间对情境有所认识。另外,系统自行发出警报后马上免除系统的责任,并将责任转移给驾驶员,也会引发道德风险,即生产商设计出的系统会尽可能多地发出警报,以此免除责任。(30)参见牛天宝:《通过现有规范解决自动驾驶汽车肇事之刑事责任归属问题》,载《法学杂志》2020年第3期,第126-127页。第四,确认驾驶员是否接管以及是否采取风险减缓措施。如果系统确认,在紧急情况下驾驶员未能及时接管汽车,那么系统需要继续保持对车辆的控制,并执行最小风险管理措施。第五,对驾驶员可适用性的监管。这也是驾驶员和汽车间的一种新的合作方式。自动驾驶汽车必须包含一个驾驶员可适用性识别系统,以监测驾驶员是否已经系好了安全带或者在座位上,并且可以接管动态驾驶任务。
另外,制造商在将该项技术推向市场的时候,不应在系统的功能方面进行虚假宣传而误导公众,而是要告知甚至训练驾驶员如何安全地使用自动驾驶系统。当然,除了自动驾驶汽车本身应当符合上述要求外,车路协同基础设施应该被确保正常运行。如果缺乏一个功能齐全的V2X(31)V2X泛指各种车辆通信的情况,包括车到车(V2V,Vehicle to Vehicle)、车到基础架构(V2I,Vehicle to Infrastructure)、车到网(V2N,Vehicle to Network)以及车到人(V2P,Vehicle to Pedestrian)之间的交互应用信息。参见刘少山、唐洁等:《第一本无人驾驶技术书》,电子工业出版社2019年版,第241页。车联网通信技术对汽车周边交通环境进行感知的话,那么,自动驾驶系统可能无法独立地及时识别某些紧急的交通情况,从而发出接管要求。驾驶员未安全接管汽车导致事故发生,也可能与上述其他参与主体违反特定义务有关,而这些义务的违反也会影响驾驶员刑事责任的最终认定。
四、人机共驾模式下接管义务违反及其刑事责任的认定
(一)接管义务在刑法上的地位
人机共驾模式下接管义务属于一种作为义务,往往被规定在诸如《道路交通法》等法律法规中。(32)类似地,2021年我国《道路交通安全法》(修订建议稿)第155条第2款规定:驾驶人应当处于车辆驾驶座位上,监控车辆运行状态及周围环境,随时准备接管车辆。但该条款最终未通过。根据形式的作为义务来源理论,该义务也可以成为刑法上的作为义务。但是,道路交通法规通常不可能详细地对接管义务有关的内容,如接管的场景、接管时间的长短、自动驾驶时被允许从事的非驾驶类活动等事项进行规定。这些内容只会出现在自动驾驶汽车购销合同或者使用说明书中。因而,人机共驾模式下分配权责归属的实际上是自动驾驶汽车购销合同或者使用说明书。对此,有学者担忧,在合同中生产者可能会为了转移安全风险和法律责任而扩大驾驶员的义务,以至于合同可能显失公平,所以不能将合同或使用说明书视为作为义务来源。(33)参见皮勇:《论自动驾驶汽车生产者的刑事责任》,载《比较法研究》2022年第1期,第63页。其实,无论是将道路交通法规还是民事合同视为刑法上作为义务来源,都是从形式的作为义务来源理论出发。通说认为,这种作为义务来源理论会导致不作为犯处罚范围过于宽泛,因此,还需要从刑法的目的即法益保护这一实质理由考察行为人是否具有特定作为义务。而从区分法益保护和危险源监督二分的实质作为义务来源理论出发,自动驾驶场合,即便是自动驾驶汽车购销合同显失公平,消费者仍然购买自动驾驶汽车并使用的话,此时,驾驶员已经事实上对汽车这一危险源进行支配,因而具有保证这种危险源不会对外造成侵害的义务。亦即,其需要承担确保驾驶安全并在紧急情况下接管汽车的义务。至于为了防止显失公平的购销合同成为作为义务来源的关键,其实在于国家监管机构对自动驾驶汽车进行准入管理时,对自动驾驶汽车购销合同及说明书的公正性、合理性进行严格审查。
在具体案件中,驾驶员未履行接管义务在主观上既可以是出于故意,也可以是出于过失。如果驾驶员在系统发出接管请求后故意未接管而引发致人伤亡的事故,由于在驾驶员接管之前都是由系统执行动态任务并控制汽车,因此,驾驶员属于以不作为方式实施故意伤害或者故意杀人行为。对于驾驶员过失地未履行接管义务而引发事故,在刑法上如何定性呢?对此,有学者认为,如果驾驶位人员接管了汽车控制权且有能力避免交通事故,同时符合交通肇事罪的其他构成条件的,可以认定为交通肇事罪。但是,过失未履行接管义务引发事故的,驾驶位人员不构成交通肇事罪,而可能构成重大责任事故罪、过失致人死亡罪等罪名。其基本理由在于,一方面,L3级自动驾驶模式下,在交通事故发生之时,驾驶员没有控制汽车,不接管不属于交通肇事罪的驾驶行为。另一方面,该情形不满足交通肇事罪的犯罪场所条件。由于2018年《智能网联汽车道路测试管理规范(试行)》第7条规定,测试车辆应在封闭道路、场地等特定区域进行充分的实车测试,因而,在我国,自动驾驶事故发生的场所不属于公共交通领域。(34)参见皮勇:《论自动驾驶汽车生产者的刑事责任》,载《比较法研究》2022年第1期,第59页。
基于当下最新自动驾驶立法,驾驶员因过失未履行接管义务导致交通事故的,应当定性为交通肇事罪更为恰当。这是因为根据我国出台的相关条例,目前在公路、城市道路、区域范围内的指定路段可以进行自动驾驶汽车测试和示范应用。(35)参见2021年7月工业和信息化部、公安部、交通运输部制定的《智能网联汽车道路测试与示范应用管理规范(试行)》第2条的规定。因此,当交通事故发生在这些公共交通领域,当然符合交通肇事罪的犯罪场所条件。另外,驾驶行为是指实时对汽车进行支配控制。在人机共驾模式下,对汽车的支配控制不仅仅包括执行动态驾驶任务时从物理上控制汽车,还应该包括驾驶员接管汽车以防止事故风险的行为。即便是驾驶员未接管汽车,也是涉及不及时控制汽车的问题。这类似于驾驶员在出现红灯时应踩刹车而未踩刹车以至于发生事故一样。退一步讲,即便接管行为不属于驾驶行为,但根据2000年《最高人民法院关于审理交通肇事刑事案件具体应用法律若干问题的解释》(以下简称《交通肇事解释》),非交通运输人员也可以成为交通肇事罪的主体,因而,交通肇事罪的实行行为并不仅指驾驶行为。只要《道路交通法》或者地方性自动驾驶立法中规定了特定主体的接管义务,该主体也可能因为不履行接管义务而违反交通运输管理法规引发事故,从而构成交通肇事罪。
(二)接管义务与信赖原则的适用
驾驶员履行接管义务的前提是其能够认识到紧急情况的危险性,但是如果驾驶员虽然认识到了这种危险性,却由于自动驾驶汽车未发出接管指令,因此相信在自动驾驶过程中系统会应对该情形,以至于引发交通事故,那么,驾驶员能否基于信赖原则而主张自己没有接管义务呢?对于该问题,学界存在不同的见解。否定论基于以下理由,认为信赖原则不适用于L3级自动驾驶场合:一方面,信赖原则的适用前提是自动驾驶汽车本身能够有效控制安全风险,既然对L3级自动驾驶中驾驶员规定了警觉、监控和接管义务,实际上是对自动驾驶系统正常运营的怀疑,因此不能完全信任自动驾驶系统。(36)参见王莹:《法律如何可能——自动驾驶技术风险场景之法律透视》,载《法制与社会发展》2019年第6期,第107页;皮勇:《论自动驾驶汽车生产者的刑事责任》,载《比较法研究》2022年第1期,第64页。况且,传统的汽车驾驶语境下发展出来的信赖原则针对的是交通参与者,而不是汽车。(37)参见皮勇:《论自动驾驶汽车生产者的刑事责任》,载《比较法研究》2022年第1期,第64页。另一方面,自动驾驶汽车的人工智能系统虽然是听从计算机程序的指令,但并非完全听从于计算机系统的指令机械行驶,即其本身具有自主性。(38)参见彭文华:《自动驾驶车辆犯罪的注意义务》,载《政治与法律》2018年第5期,第97页。因而,难以对系统予以信赖。在上文提及的情境下,自动行驶系统和驾驶人员可能存在共同过失或者过失竞合,不应直接认定适用信赖原则。(39)参见储陈城:《自动驾驶时代:交通肇事如何适用信赖原则》,载《检察日报》2019年2月16日,第3版。肯定论则认为,既然人在通常情况下都可以作为信赖的对象,在机器人比人的表现更加专业、稳定、出错率更低的情况下,如果机器人可以独自完成某一模块的任务,而通常不需要人类干涉,那么,人类自然可以信赖机器人在相关领域内的合规行为。(40)参见马天成:《自动驾驶致损的刑事责任研究》,载江溯主编:《刑事法评论:刑法的科技化》,北京大学出版社2020年版,第97页。当然,肯定论也承认信赖原则的适用是需要满足特定条件的,并且有必要根据自动驾驶的级别来明确驾驶员信赖的内容。譬如,L3级自动驾驶中驾驶人对系统的信赖程度较高,不具有随时注意驾驶环境的义务;L4和L5级自动驾驶中,允许驾驶人全面信赖系统。(41)参见付玉明:《自动驾驶汽车事故的刑事归责与教义展开》,载《法学》2020年第9期,第141页。
针对否定说,首先有必要指出的是,自动驾驶中驾驶员对系统的信赖问题,其本质在于驾驶员对系统背后生产者和设计者的信任。因为即便系统有一定的自主性,但系统作出的决策和操作活动也是生产者和设计者可以预见并加以控制的。因此,否定论以信赖原则仅适用于交通参与者之间为由否定驾驶员对系统的信赖是不恰当的。另外,信赖原则中的信赖并不是指,当一方信赖另一方时,前者不用履行任何的义务,而往往是指在分工合作过程中,参与一方遵循规范的同时信赖对方也会遵守规范。换言之,分工协作并不排斥信赖原则的适用,反而明确化的分工是信赖原则适用的前提。(42)参见曹菲:《管理监督过失研究——多角度的审视与重构》,法律出版社2013年版,第283页。另外,有研究表明,在L3级人机共驾阶段,人对自动驾驶系统的信任是影响自动驾驶中人机协同效率与驾驶安全的关键要素;驾驶员对自动驾驶车辆保持适当的信任水平对驾驶安全至关重要。若驾驶员不信任自动系统,可能会忽视系统提供的辅助功能,无法有效降低其疲劳驾驶等交通风险;若驾驶员过度信任系统,则会放弃对车辆的监控而导致巨大安全隐患。(43)参见高在峰、李文敏等:《自动驾驶车中的人机信任》,载《心理科学进展》2021年第12期,第2172页。基于上述理由,肯定说更为恰当。
当然,L3级自动驾驶中驾驶员对系统的信赖必须具备相当性和合理性。这就要求驾驶员和系统之间的分工必须明确,譬如,驾驶员仅对自动驾驶汽车销售合同或使用说明书中规定的应当识别的紧急情况进行识别,至于其他的应当由系统识别并发出接管要求的紧急情形,驾驶员是可以信任系统去识别的。这也是因为自动驾驶系统比驾驶员路况感知和决策能力更强。系统正常时还未能识别出来的紧急情况,也不能要求驾驶员去识别,否则,便是强人所难。当然,如果根据一般常识可以判断,系统明显不正常,汽车已经处于不适合自动驾驶的状态,驾驶员就不能单纯地依据信赖原则免除自己的义务了。此时,驾驶员需要履行的是第二种情形下产生的接管义务。
(三)接管义务过失违反的具体归责
自动驾驶场景下,驾驶员过失不履行接管义务发生的概率远远高于驾驶员故意不履行接管义务的情形,且前一种情形涉及不作为犯和过失犯的交叉,其刑事责任认定过程更为复杂。为此,有必要围绕驾驶员过失不履行接管义务这一情形的具体归责问题展开研究。所谓过失未履行接管义务是指,驾驶员在履行接管义务过程中不够谨慎,比如过于沉迷非驾驶类活动而未保持最基本的警觉,导致自己要么未认识到应当接管的情形以至于未能接管汽车,要么已经认识到该情形但反应力下降而未能及时接管汽车。具体而言,自动驾驶中驾驶员因过失未履行接管义务成立过失不作为犯罪的,需要同时满足以下条件。
首先,驾驶员未接管汽车并发生人员伤亡等法益损害的结果。其一,驾驶员未成功接管汽车。驾驶员是否成功、适当地接管,需要进行个案判断。尤其是要从有效控制风险的角度来看,在产生接管义务的第二种情形下,驾驶员是否对警车、救护车、消防车等发出的如停车、形成救援车道、驶入应急车道、让路等信号做出适当的反应,甚至在有些紧急情形下,驾驶员接管汽车后可能会出现应急的反应,比如越过边界线以避免风险。(44)Verband der Automobilindustrie, Regierungsentwurf für ein Gesetz zur nderung des StVG zum hoch und vollautomatisierten Fahren vom 20.02.2017 (BT-Drucks. 18/11300), S. 6.而对于驾驶员成功接管汽车之后驾驶过程中的行为引发法益损害结果的,不属于此处要探讨的情形。其二,未成功接管汽车本身不足以构成犯罪,因为自动驾驶系统有可能在执行最小风险策略后,汽车安全地停在路边。只有当驾驶员没有履行接管义务而造成人员伤亡的交通事故时,才需要判断驾驶员的行为是否构成过失不作为犯罪。
其次,驾驶员违反了作为义务和注意义务。过失不作为犯中,需要保护哪些利益、避免哪些危险,是由保证人义务和注意义务决定的,这两种义务之间相互确定,相互约束。(45)参见[德]冈特·施特拉腾韦特、[德]洛塔尔·库伦:《刑法总论I——犯罪论》,杨萌译,法律出版社2006年版,第423页。在汽车处于危险状况下,驾驶员的保证人地位决定了其必须采取必要的安全措施,即接管汽车的控制权。而注意义务的判断则基于一个理性和审慎的人处于行为人的境况中时会如何行为。在自动驾驶场合,驾驶员作为一个理性、审慎的人应当小心谨慎地识别紧急情况或者系统发出的接管命令,以及识别这些危险或者命令之后谨慎地采取外在措施来接管汽车。在具体案件中,驾驶员可能因为沉浸于其参与的非驾驶类活动中,而未保持警觉,以至于不能及时识别紧急情况,或者即便识别到了该情况,但由于疏忽采取了错误的接管措施。无论哪种不注意的情形,都导致驾驶员最终未能成功接管汽车。
再者,驾驶员具备相应的注意能力和作为能力。只有在具体情形下结合驾驶员自身能力去判断,驾驶员可以认识到危险(包括危险的存在以及危险的大小),并且在此基础之上采取可行的接管措施时,才能要求其接管汽车,从而避免危险。但是,在一些情形下,基于不可归责的内外原因,驾驶员不具备识别危险以及通过接管汽车避免危险的行为能力。其中,外部原因包括:(1)情况非常紧急,驾驶员来不及反应,已经发生碰撞而引发事故;(2)外界状况不够明显,或者自动驾驶系统故障导致所发出的指令形式难以让驾驶员察觉自己需要接管系统;(3)自动驾驶系统发生故障,驾驶员此时想刹车却刹车不了或者方向盘卡壳、想接管驾驶但系统不听使唤,以致于发生事故。(46)参见周铭川:《论自动驾驶汽车交通肇事的刑事责任》,载《上海交通大学学报(哲学社会科学版)》2019年第1期,第41页。而自身原因包括不可预见的情况下身体出现的特殊状况(47)譬如,2012年德国“阿沙芬堡案”中,驾驶员就是因为突然脑中风而失去意识,而辅助系统将汽车引回道路造成事故。参见[德]埃里克·希尔根多夫:《自动驾驶与刑法——以“阿沙芬堡案”为例》,林信铭译,载《高大法学论丛》2019年第1期,第10-11页。(如头部受到打击,心脏病、癫痫、糖尿病发作等身体疾病)。针对这种情形,英国《自动驾驶:联合报告》建议在满足以下条件时驾驶员可以将其身体原因作为一个抗辩事由:(1)身体原因出现的时间点是接管要求期满后恢复驾驶之前;(2)因突然的身体状况,被告接管的能力已经严重地受到损害;(3)该情形或损害不是由被告人造成的;(4)被告不能合理地预见这种情况。(48)Law Commission of England and Wales, Scottish Law Commission, Automated Vehicles: joint report, printed on 25 January 2022, p. 164.
最后,过失不作为和结果之间具备因果关系和归责关系。对此,通常需要采取假设的方法去判断,如果驾驶员遵守了注意义务并履行了接管义务,法益损害的结果能否避免。譬如,驾驶员在高速公路上行驶,启动自动车道保持系统,然后坐在座位上小睡一会。此时,驾驶员当然没有保持警觉,随后发生了事故。如果是系统受到明显的可识别的故障(例如突然全油门)的干扰而引发事故,而驾驶员保持警觉的话,就可以识别该故障并顺利接管汽车,从而避免结果的发生。在此情况下,驾驶员违反注意义务未接管汽车的行为与结果之间有必然关联性,对其可以进行归责。但是,在一些案件中,如果驾驶员即使有足够的感知能力,也无法识别和预防事故,或者,即便识别了紧急情形,汽车突然违反规定方向错误地进入一个单行道,然后在驾驶员接管时也无法避免碰撞。此时,注意义务违反的行为与结果之间缺乏因果关系。(49)Jan-Erik Schirmer, Augen auf beim automatisierten Fahren! Die StVG-Novelle ist ein Montagsstück, NZV 2017, S. 256.
(四)接管义务违反与其他义务违反的竞合
人机共驾模式下,接管过程中发生人员伤亡的事故极可能是驾驶员过失未履行接管义务以及其他参与者过失之竞合所致。而如何对过失竞合情形下各行为人进行刑事归责,需要结合竞合的具体类型来展开分析。学理上,过失竞合分为对抗型的过失竞合与并行型的过失竞合。前者是指行为人与被害人的过失竞合,后者是指复数行为人的过失竞合。在汽车控制权接管过程中发生的事故可能是由驾驶员和被害人的过失竞合导致。对于这种对抗型过失竞合,如果被害人的过错未达到自我答责程度的话,通常在认定过失犯时无须考虑。但是,《交通肇事解释》第1条规定,要在分清事故责任基础上认定交通肇事罪,因此,被害人和行为人事故责任的划分会对交通肇事罪的成立起到一定的限制作用(50)参见张明楷:《交通肇事的刑事责任认定》,载《人民检察》2008年第2期,第8页。,而被害人的过失则会影响事故责任的划分。当然,交通肇事罪的最终成立还是要符合过失犯的其他成立要件。
并行型过失竞合又可细分为并列型过失竞合与直列型竞合。(51)参见[日]甲斐克则:《医疗事故与刑法》,谢佳君译,法律出版社2017年版,第125页。并列型过失竞合是指处于对等地位的行为人的过失同时地、并列地竞合在一起,如过失同时犯。在自动驾驶场合,并列型的过失竞合包括驾驶员与其他交通参与者(如车外行人、其他车辆的驾驶员)或者自动驾驶系统背后的生产者、开发者等主体都违反了相关注意义务,以致于引发交通事故的情形。例如,系统发出接管请求后,驾驶员仍然从事非驾驶类活动(如观看电影),同时,由于生产者的疏忽导致系统出现了缺陷,未能留给驾驶员必要且充分的接管时间,引发碰撞事故。此时,驾驶员和系统背后的生产者同时存在过失。此种情形下,如果难以确定哪一方有过失,那么,在刑法上也只能按照意外事件来处理,而不能简单采取“有利于人类驾驶员的原则,推定自动驾驶系统违反注意义务,由其运营者承担责任”(52)参见王莹:《法律如何可能——自动驾驶技术风险场景之法律透视》,载《法制与社会发展》2019年第6期,第110页。的方案。因为从损害填补、平衡社会各方利益以及督促生产者履行技术安全保证义务等角度来看,上述推定方案更适合于民事赔偿的认定,而刑法具有其不同于民法其他部门法的功能,即辅助性地实现法益的保护(53)参见周光权:《论刑法所固有的违法性》,载《政法论坛》2021年第5期,第38页。,自动驾驶场合刑事责任的认定依旧应当坚持责任原则。直列型过失竞合是指在直接过失行为人之过失的背后还存在其他过失行为人的过失,如监督管理过失场合。例如,运营商在特定领域(如公交、出租车)将自动驾驶汽车投入运营时,在人员配置方面,应当选任有相应驾驶技能的人担任驾驶员。如果由于疏忽,导致选任的驾驶员缺乏足够驾驶技能,以至于在系统发出接管要求后,其未能及时接管,那么驾驶员过失的背后也存在运营商的管理过失。为此,对运营商的刑事责任认定需要符合管理过失的成立条件。
此外,从过失行为与所发生的结果之间的关系来看,过失竞合还可以分为累积性竞合、重叠性竞合、并存型竞合。累积性竞合是指,虽然每个行为人的过失行为本身并没有导致结果发生的危险性,但当自己的过失行为与他人的过失行为结合在一起时就具有导致结果发生的危险。(54)参见李世阳:《共同过失犯罪研究》,浙江大学出版社2018年版,第103-104页。重叠性竞合是指,虽然只通过单方的过失行为导致结果的发生,但如果没有其他过失行为就可以防止结果的发生。例如,自动驾驶中,驾驶员由于过失未及时接管汽车,之后系统由于开发者的过失也未能及时履行采取最小风险措施的义务,导致交通事故发生。在此情形下,即便有驾驶员的过失,但如果系统能够及时采取最小风险措施,也会避免交通事故的发生。对于累积性竞合和重叠性竞合,通常只需要围绕每个主体单独认定其刑事责任即可。
而在刑事归责时面临难题的是并存型竞合中的因果关系认定。所谓的并存型过失竞合是指,每个行为人的过失行为各自都独立地含有导致结果发生的危险,也就是说即使没有对方的过失行为,自己的过失行为也可以单独导致结果的发生。例如,驾驶员离开驾驶位以至于不可能及时接管汽车,而系统在发出接管要求后未能在一段时间内继续控制汽车。假设系统的生产者有过失的话,那么此时,驾驶员和生产者的过失行为都可以单独引起结果的发生。因而,在认定注意义务违反性关联时,各方都会主张,即便自己遵守了注意义务,其他行为人的行为也会导致结果的发生。但是,这种抗辩是缺乏法理根据的。因为注意义务违反性关联的认定是一个规范归责的问题,当合义务替代行为不能避免结果时,不能追究行为人的责任,但是,不允许行为人以一个他人的违法替代行为也可以导致结果来免责。(55)Vgl. Urs Kindhäuser, Zurechnung bei alternativer Kausalität, GA 2012, S. 147.为此,在这种过失竞合中认定某一行为人违反注意义务的行为与结果之间的必然关联时,还要假设其他违反义务的人也履行了必要注意义务。例如,在上述案件中判断“如果驾驶员遵守了注意义务,结果能否避免时”,还要同时假设自动驾驶系统是正常的。而在判断“如果系统生产者遵守了注意义务,结果能否避免时”,也要假设驾驶员是遵守注意义务的。在这种情况下,每个行为人违反注意义务的行为与结果都是具备因果关系的,因而,可以追究每个人的刑事责任。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:13:42
汽车实用技术(2022年4期)2022-03-07 06:07:20
海峡姐妹(2020年12期)2021-01-18 05:53:12
中国外汇(2019年12期)2019-10-10 07:27:00
刑法论丛(2018年3期)2018-10-10 03:36:10
人大建设(2018年4期)2018-06-26 08:38:26
时代英语·高二(2017年4期)2017-08-11 11:45:54
公民与法治(2016年4期)2016-05-17 04:09:26
连环画报(2015年12期)2016-01-14 11:24:20
中国卫生(2015年8期)2015-11-12 13:15:36