
基于PyQt5的水深比对检测系统在水下地形测量检查中的应用
2023-09-05 07:54:00唐佑辉许成义赵云昌
山东国土资源 2023年8期
唐佑辉,许成义,赵云昌
(山东省国土测绘院,山东 济南 250013)
0 引言
水下地形测量是新型基础测绘的重要组成部分[1],分为常规模式和自动化模式。常规模式采用GNSS方法测量测点平面位置,用测深杆、测深锤测量水深;自动化模式采用无人测量船测量,无人测量船集成了GNSS、姿态仪、单波束测深仪或者多波束测深仪,能够同步采集测点平面位置和水深数据[2-4]。水下地形测量具有隐蔽性,无法像陆上地形测绘一样,可以自主选择地形特征点,只能通过布设一定数量的主测线获取测线上一定间隔的水下点信息。水下地形测量的隐蔽性,决定了其无法像陆地地形检查那样,通过实地测点来衡量地形测量成果质量。《水利水电工程测量规范》规定,应布设一定数量的测深检查线,且检查线宜垂直于测深线,通过对比图上1mm范围内水深点的深度来衡量水下地形测量的精度[5]。因此准确、高效的对比统计距离限差范围的水深点的深度误差及各项检验参数在水下地形测量质量中至关重要。
1 水下地形测量原理及误差来源介绍
1.1 水下地形测量原理
水下地形测量是指利用测绘手段,获取水下点定位、水深及高程信息。水下点定位通常采用GNSS接收机,通过CORS获取水下定位点对应的水面点X、Y、Z坐标。水深值通过单波束或多波束测深系统获取。通过水面点大地高和水深值可获得水下测量点的大地高,利用区域似大地水准面模型转换可获得水下测量点的正常高[6-7]。
水深测量主要利用了回声测距原理,发射换能器向水下发射一个脉冲超声波信号,在水中向下传播,遇到密度不同的水底介质时发生反射,反射后的声脉冲被水面的接受换能器所接收。根据声脉冲在水中往返的时间及声脉冲在水中的传播速度,即可计算出换能器至水底的直线距离。由于换能器底面距离水面有一定距离,用于计算水深的声速与实际声速不同,导致回声测深仪测得的观测水深并非实际水深。要获得实际水深要经过吃水改正、声速改正,吃水改正可以输入船体吃水深度进行实时改正,声速改正可以根据测得实际声速进行后期改正[8-9]。实际水深获取流程如图1所示。
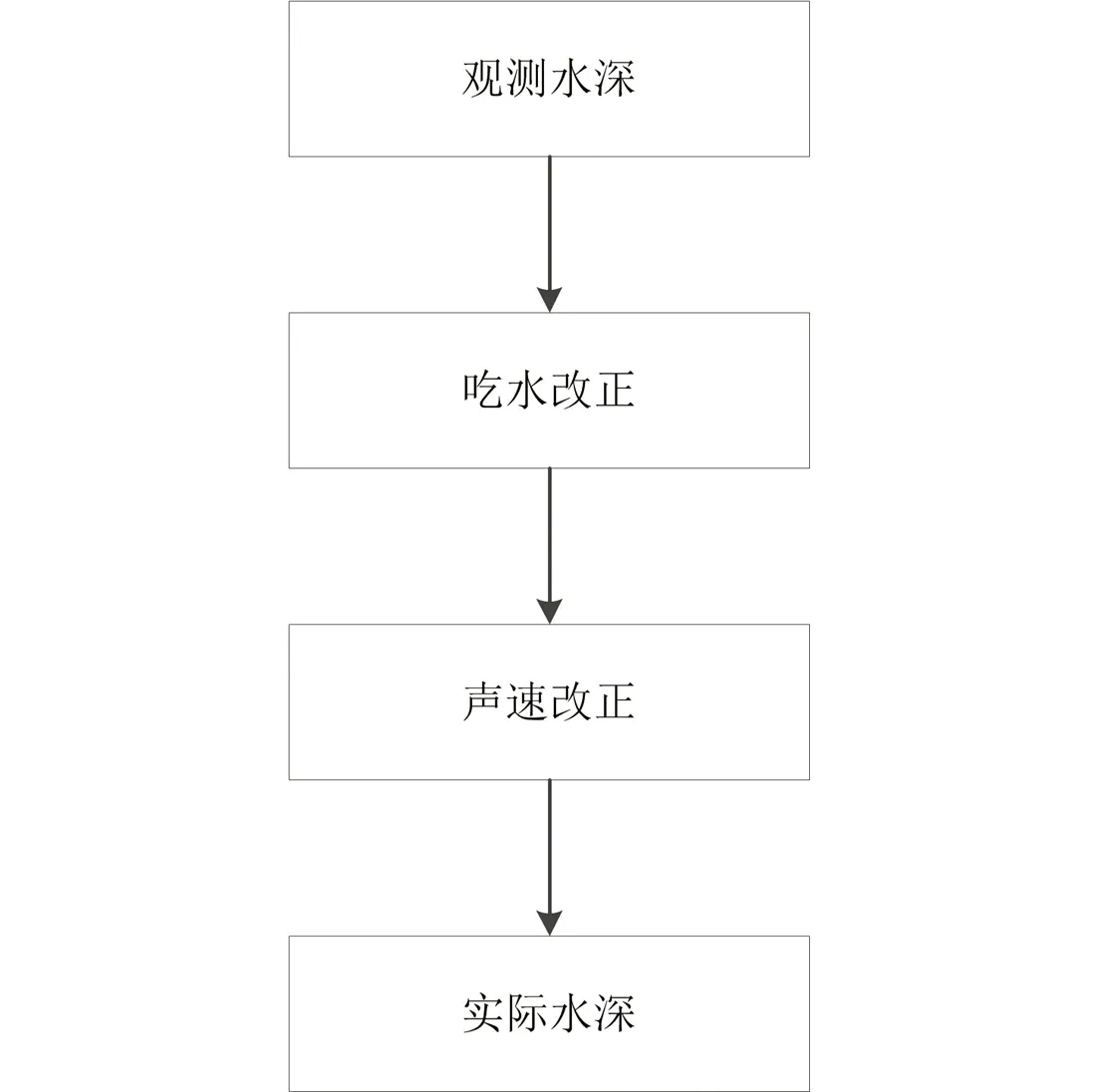
图1 实际水深获取流程图
1.2 水下地形测量误差来源
水下地形测量的误差来源主要包括测点平面位置误差及水深测量误差[10-13]。测点定位采用GNSS实时动态差分定位,影响测点平面定位精度的主要因素为接收卫星的状况、电离层影响、多路径效应等。水深测量误差主要包括声波回声误差、船舶姿态变化引起的误差、船舶动态吃水引起的误差等。水下地形测量主要目的是获取水底地形点的高程信息,GNSS实时动态差分获取的大地高误差及区域似大地水准面精化模型转换误差也会影响水下地形测量成果的质量。
2 水深比对检测系统设计
水下地形测量的质量检查主要通过在水域布设一定数量的检查线,比对检查线和主测线相交处一定距离的测点水深差值来实现。水下地形测量数据检查的参数较多,包括主测线总长度、检测线总长度、检测线长度占主测线长度比、对比样本点个数、不符值个数、不符值比例、各深度区间检测中误差、各深度区间超限点个数等,需要计算统计的项目较多,单纯依靠人工寻找检测比对点难度较大,因此设计开发一套水深比对检测系统很有必要。
2.1 水下地形测量检测要求
外业数据采集前,需要事先收集水域主测线的方向、主测线长度、水域面积等信息。按照《水利水电工程测量规范》规定,测深检查线宜垂直于主测线方向,其长度不宜小于测深线总长度的5%。检查线的布设应分布均匀,为了兼顾水域重点部位(如水库主坝前)的精度,适当在特殊部位增设检查线。检查线上测点间隔应不低于测线施测的测点间隔。系统设定主测线文件和检查线文件为CASS格式,测点高程为正常高,进行检查线施测时应采用RTK获取水面正常高,用以计算各测点的水深区间。在数据采集过程中,由于水流速度、波浪大小、船行速度等因素影响,会造成吃水深度不同程度的改变,从而影响检测数据质量。无人船采集数据时,将其自动模式可有效保证船行速度且能保证按照设定的测线方向运行,在浪高大于0.4m时应停止采集数据,从而提高检测数据采集质量。
2.2 水深比对检测系统模块设计
系统模块包括打开文件、参数设置、统计结果展示及比对详细结果展示模块。
(1)打开文件模块:设定检测线和主测线数据文件的格式,本系统可以读取CASS格式及东北高(空格分割)模式的数据文件。
(2)参数设置模块:需要设置图上检查线和主测线比对范围、成图比例尺(通过比对范围和成图比例尺确定实地检测数据比对范围)、测量时的水面高程(用以计算测点水深)、测区名称、各区间深度限差要求(本系统中将测深区间设定为0~5m、5~10m、10~20m、20m以上4个区间)。
(3)统计结果展示模块:展示的统计结果包括主测线长度、检查线长度、检测线长度占主测线长度的百分比、各区间深度超限点个数及超限比例、检测比对的样本数、总的不符值个数和比例另外还计算了比对的总的中误差(仅供参考使用,在导出的统计结果中按照深度区间分别计算中误差)。
(4)对比详细结果:详细展示了比对的检测线测点坐标及相匹配的主测线测点坐标、测点间距、水底高程差值、检测水深值等信息。
2.3 水深比对算法设计
水深比对算法有最近点法、交叉点法、DEM法[14-15]。本系统采用最近点法进行开发。按照《水利水电工程测量规范》规定检测线与主测线相交处,图上1mm范围内进行比对。为加快比对速度,首先对主测线文件缩小范围,通过计算出检测线文件的最大坐标值和最小坐标值,将主测线文件提取出检测线文件所在区域的坐标数据。检测线某一测点数据可能在图上1mm范围内存在多个与之相匹配的主测线测点,通过筛选出距离最近的主测线测点作为比对测点数据。在统计分析阶段根据水深值进行区间划分,对符合限差范围的测点文件和超限测点文件进行计数。比对的具体设计如图2所示。

图2 水深比对算法流程图
3 水深比对检测系统实现
3.1 系统开发语言介绍
本系统采用Python语言,基于PyQt5包的方式进行开发。Python是一种面向对象的解释型高级编程语言,相较于C、C++等编译型语言来说具有简单易学、编写效率高等特点[16-20]。Qt是一个跨平台C++开发库,能够开发出界面更加美观的图形用户界面应用程序。PyQt5是Python与Qt结合的产物,它既可以利用Python语言强大而又简洁的语法,又可以利用Qt强大的功能。PyQt5由一些列的python模块组成,拥有超过620个类和6000个函数及方法[2]。PyQt5的模块包括QtCore、QtGui、QtWidgets、QtMultimedia、QtBluetooth、QtNetwork、QtPositioning等15个模块。
3.2 系统实现功能
系统设计实现功能主要包括:
(1)通过导入检测线文件和主测线文件,根据设计好的图上比对范围,进行水深比对计算,计算出测点匹配数据及各项检验参数。
(2)实现水深检测原始记录表和水深检测统计记录表的自动生成,生成的格式为excel格式。
(3)自动绘制主测线和检测线走向示意图,展示主测线和检查线方向及测点数据范围。
3.3 工程实例
为检验系统的运行效率,选取山东省济南市某小型水库作为样例进行检测。该水库主测线文件包含4万多条测点数据,检测线文件包含2900多条测点数据。测线数据格式为CASS模式,水面高程为310.38m。打开系统选择检测线文件和主测线文件,输入水面高程及测区名称,设置各区间中误差,点击比对计算按钮,在控制台窗口中将显示程序执行的进度,具体执行过程如下图3所示。

图3 水深比对系统运行图
本项目比对计算执行时间为19.4s。系统执行完比对计算后,将在详细结果窗口中展示对比的具体信息,点击导出原始记录按钮将导出具体的比对数据,点击导出统计结果按钮将导出各区间深度中误差计算统计表并在程序主界面对比结果中展示各深度区间超限点数、超限比例等计算指标。图4为程序运行完成后展示的对比结果,图5为生成的主测线与检测线方向示意图,可方便浏览主测线和检查线方向,图6为生成的水深比对统计表,表格中将对比的各项参数结果进行了展示。
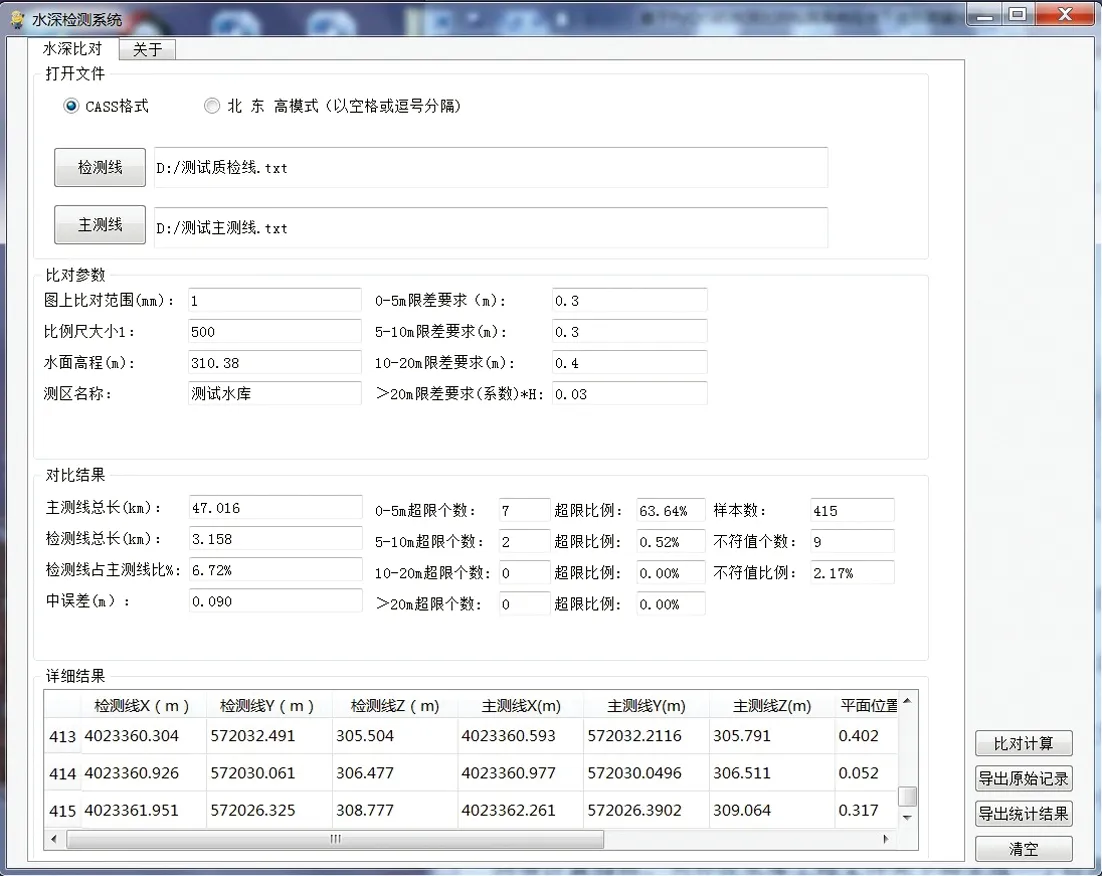
图4 水深比对计算结果
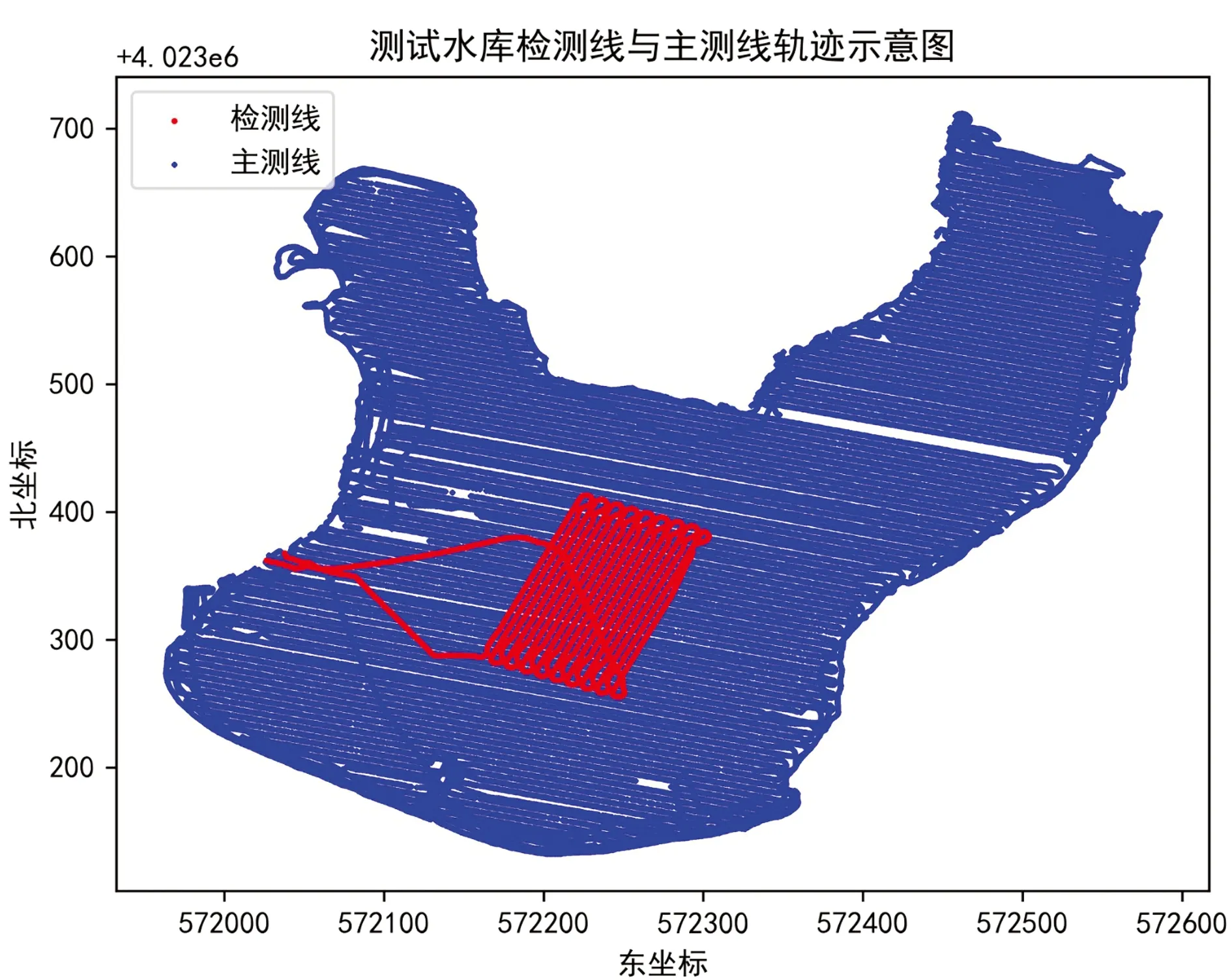
图5 检测线与主测线方向示意图
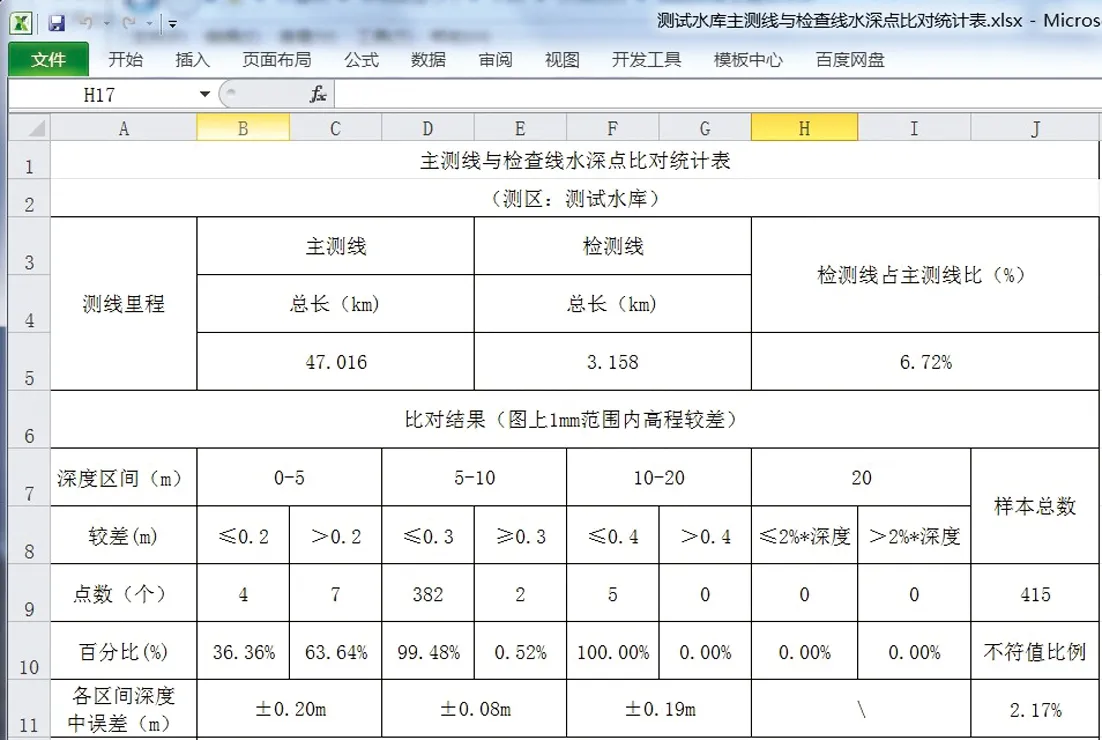
图6 水深比对统计表
4 结论
(1)本文叙述了目前水下地形测量的方法主要分为常规模式和自动化模型,水下地形测量质量检查与陆上地形图质量检查的不同点。简要回顾了水下地形测量的原理及水下地形测量的误差来源。
(2)本文针对水下地形测量质量检查需要检查的参数较多,检测数据量大的特点,设计了一套水深比对检测系统,从水下地形测量检测要求、系统模块、比对算法等方面进行设计。
(3)本文结合Python语言具有开发速度快、开发效率高的显著优势及PyQt5作为图形界面程序(GUI)开发的工具包的优点,利用python语言和PyQt5工具开发了一套水深比对检测系统,实现了对水下测量检测线和主测线测深数据的自动比对,自动计算统计各项检查参数、生成检测线和主测线走向示意图等功能。在山东省某水库的水下地形测量质量检查中得到了应用,取得了较好的效果。
(4)本系统在设计时兼容了CASS格式和东北高(空格分割)模式的检测数据,提高了对检测数据格式的适用性。测线里程计算根据相邻两点之间距离进行累计计算得来,如对测线数据进行随意排序将会影响里程计算,可通过在CASS中进行展点计算其测线里程。
猜你喜欢
机械设计与制造(2023年2期)2023-02-27 12:40:16
河北水利(2022年10期)2022-12-29 11:48:12
海洋通报(2022年4期)2022-10-10 07:40:32
时代汽车(2021年18期)2021-09-17 11:51:59
汽车实用技术(2021年10期)2021-06-04 07:51:00
电动工具(2020年6期)2020-12-29 05:53:36
设备管理与维修(2020年2期)2020-03-24 13:12:06
浙江国土资源(2015年4期)2015-05-09 08:43:59
水利水电科技进展(2014年1期)2014-10-17 02:29:14
机械制造与自动化(2014年1期)2014-03-01 04:22:04
