三维激光扫描技术在自然文物侵蚀剥落监测中的应用研究
2023-09-05 06:27:20张庆圆邹彦龙李金衡
测绘通报 2023年4期
张庆圆,邹彦龙,李金衡
(1. 河北省地质矿产勘查开发局国土资源勘查中心(河北省矿山和地质灾害应急救援中心),河北 石家庄 050001; 2. 中科北纬(北京)科技有限公司,北京 100043; 3. 河北省第三测绘院,河北 石家庄 050001)
近年来,对自然文物的保护受到社会各界越来越多的关注,随着科学技术的不断发展,监测手段也越来越丰富,各研究机构也从监测的角度开始探索对文物的预防性保护[1]。目前对文物保护的监测手段主要有全站仪、RTK、无人机摄影测量及三维激光扫描仪等。使用传统的测量手段只能获取到监测点的点位坐标,对于自然文物的整体性缺乏数据支撑,而且布设监测点本身也会对峰体造成不可逆的损害。三维激光扫描技术为文物保护工作提供了新的技术手段,它以非接触的方式快速获取目标对象的高精度、高密度的三维点云信息[2-3],能准确表现峰体的微观形态,也能通过多期对比监测到峰体的细小变化。
三维激光扫描技术已广泛应用于大型文物保护工程、边坡监测工程、文物古建的检测、检修工程。如文献[4]三维激光扫描与传统测绘相结合以绘制线画图辅助古建筑修缮;文献[5]利用三维激光扫描仪对厂区内采空区边坡进行监测,通过两期模型数据分析边坡的变形程度与趋势;文献[6]基于地面三维激光扫描技术,通过逆向建模与有限元分析等对颐和园十七孔桥进行了承载能力分析并给出了结构的检修加固建议。
承德市磬锤峰国家森林公园景区内的磬锤峰距今已有300万年,因其一直遭受风化、酸化腐蚀,峰体本身也有开裂和石体剥落的现象存在。本文基于保护磬锤峰的实际需求,应用三维激光扫描技术,通过点云数据采集,高精度三维建模,监测峰体重心、面、体积的变化,找出造成峰体变化的最直接因素,寻求保护方法,使其得到全面有效的保护。
1 三维激光扫描技术测量原理及技术路线
三维激光扫描技术的测量原理:以非接触的方式快速获取目标对象的高精度、高密度的三维表面信息,相比传统测绘技术,具有分辨率高、速度快、扩展性强等优势[7]。
三维激光扫描系统的组成部分有激光扫描仪、计算机、电源系统、支撑系统等[5]。激光测距技术原理主要包括脉冲测距、激光三角测量、相位测距和脉冲相位测距[8]。对于测距的较远三维激光扫描仪多采用基于脉冲测距的原理,而短距离的扫描仪通常是基于相位原理和基于激光三角原理[5]。
本文使用的三维激光扫描仪基于脉冲测距原理,点云数据的坐标系统以本站扫描坐标系为基准,该系统的坐标原点为激光发射点,仪器的竖直扫描面为X轴方向,横向扫描面为Y轴方向。由此可得激光扫描点P的坐标[5],如图1所示,计算公式为

图1 点P坐标计算
式中,S为原点到被扫描点的距离;α为扫描仪测得的水平角;β为扫描仪测得的竖直角。
本文拟采用的技术路线如图2所示。

图2 技术路线
2 磬锤峰扫描监测工程实施
首先利用地面三维激光扫描技术,对峰体进行多角度、多方位的三维扫描,利用相同的起算控制点将拼接完整的激光点云数据统一转换到CGCS2000坐标系中,建立磬锤峰峰体的三维数字模型。然后通过对比分析不同周期的扫描模型数据,获取峰体侵蚀量、重心偏移量等相关数据,分析峰体的变化情况,为制定相应的保护措施提供依据[9]。
2.1 设备准备
所用设备包括1台(套)GPS、1台(套)全站仪、1台(套)徕卡三维激光扫描仪(Leica ScanStation C10)、1台笔记本电脑、两台台式计算机、1套徕卡点云数据处理软件(Cyclone V7.4)、2套Geomagic Studio软件。其中,扫描仪扫描精度为2 mm,扫描视场角为360°×270°,扫描速率为50 000点/s。
2.2 控制测量
首先通过HEBCORS系统,利用RTK分别测量出相对精度较高的K1、K2、K3坐标作为本项目的起算控制点。然后利用全站仪,按照一级导线精度进行闭合导线测量,共布设11个覆盖磬锤峰周边的一级导线控制点。
2.3 外业数据采集
结合磬锤峰峰体与周边地形的相互关系,采用精度高、视场角大的Leica ScanStation C10采集数据,每期扫描设8站,其分布位置如图3所示,各站点云数据通过标靶进行无缝拼接[10];受客观地形因素制约,在磬锤峰周边地面无法获得峰顶部点云数据。

图3 扫描设站分布
2.4 点云数据处理
2.4.1 拟合标靶、数据拼接
首先将测站信息导入Cyclone处理软件,按照测站与标靶的对应关系,人工选取标靶数据,通过标靶拟合形成球形标靶模型。然后利用Registration模块完成分站点云拼接,检查各标靶球的拼接精度,剔除不满足精度要求的标靶,形成完整的峰体点云模型[11]。
2.4.2 坐标转换
首先利用K1、K2、K3作为起算控制点,对每期拼接完整的点云数据进行坐标转换。将已知控制点的坐标导入Cyclone软件中,形成一个具有地理坐标系的ScanWorld基准站。然后将拼好的点云数据与基站再次拼接,完成相对坐标系向CGCS2000坐标系的归化转换[12]。
受Geomagic Studio软件的限制,控制点的坐标只取小数点前3位,即X坐标减去581 000,Y坐标减去4 540 000,Z坐标位数不动。
2.5 点云滤噪、三维建模
在Cyclone软件中,采用人工方式去除峰体周边的噪点数据(包括游客、树木、其他噪点等),去除噪点后的点云如图4所示,截取高程547.5—579.5 m段的峰体数据,导出坐标信息,数据格式为TXT,再转入Geomagic Studio软件进行数据封装建模,成果如图5所示。为了减少多次监测峰体表面点云间隔不均匀对结果的影响,统一抽稀点云间隔为0.01 m[13]。
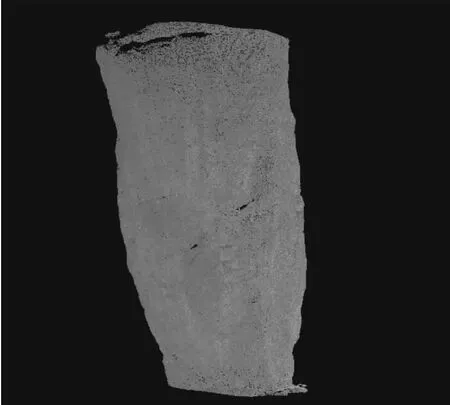
图4 峰体去噪点云成果

图5 峰体模型封装成果
3 基于三维模型的局部和整体变形分析
3.1 模型局部对比分析
为更好地计算分析峰体局部的侵蚀剥落量,以1 m的间距进行分段切片。在Geomagic Studio软件中,通过对比不同年度547.5—579.5 m高程段峰体模型数据,分段计算重心坐标和体积,模型立体对比变化量较大区域如图6所示,模型横切面对比效果如图7所示。

图6 模型立体对比效果

图7 模型切面对比效果
以高程559—563 m段峰体模型为例,按照1 m的单位分段计算峰体体积变化量,如图8、表1所示。
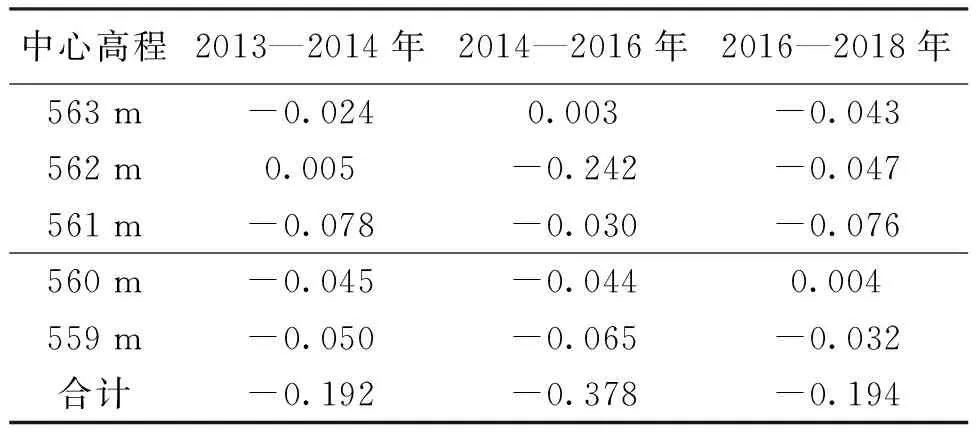
表1 高程559—563 m段峰体体积变化量 m3

图8 高程559—563 m段峰体体积变化
3.2 不同年度模型整体对比分析
通过监测4期峰体数据,利用Geomagic Studio软件计算整个峰体体积,得到2013—2018年峰体体积和体积变化量,见表3和表4。
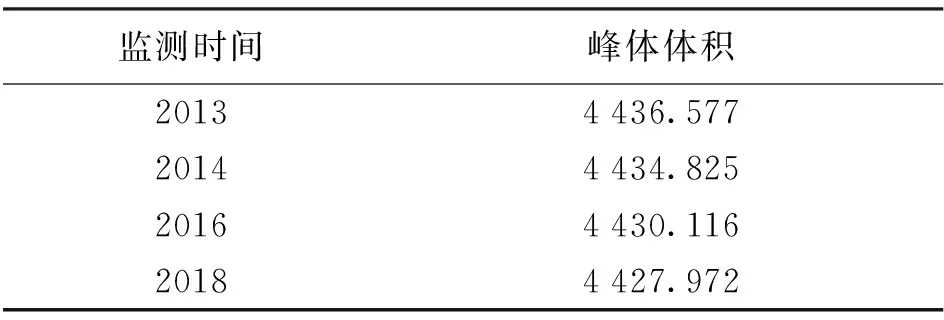
表3 2013—2018年4期峰体体积统计 m3
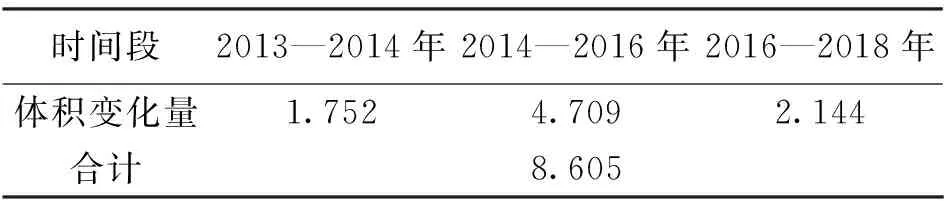
表4 2013—2018年4期峰体体积变化量 m3
在峰体上,每隔1 m截取圆柱体并测量得出重心坐标,形成的峰体重心坐标模型如图9所示,以1 m分段圆柱体的重心坐标所在坐标系为X轴指向东,Y轴指向北,通过AutoCAD 软件展绘分段重心坐标,如图10所示。

图9 峰体模型重心坐标俯视

图10 AutoCAD展绘
将2013、2014、2016、2018年的4期峰体三维模型重心坐标同时展绘在平面坐标系中,形成峰体重心变化曲线,如图11所示。通过对比分析发现,磬锤峰峰体重心在2013—2018年间未见明显偏移。
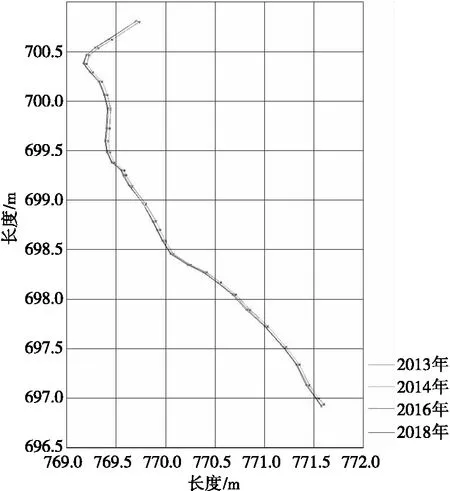
图11 4期峰体模型重心坐标俯视图
4 成果总结
本文主要从建模后的4期模型数据入手,对峰体的局部和整体进行了对比分析。利用Geomagic Studio、AutoCAD 软件从峰体局部的侵蚀剥落量、峰体整体体积与峰体重心偏移量3个方面分析了峰体变化情况。结果表明:该峰体在559—563 m高程段出现了明显的侵蚀剥落,在2014—2016年间体积变化较大,体积变化为4.709 m3, 2013—2018年间峰体体积变化总量为8.605 m3,但相对于磬锤峰峰体的体积,该变化率仅为0.194%。由此可知:该峰体2013—2018年年间体积变化较小,峰体重心未见明显偏移。
5 结 语
三维激光扫描技术相比其他传统测量技术,在数据获取、处理、分析等方面均有独特的优势,尤其在文物保护与管理工作领域应用广泛[14]。本文利用三维激光扫描仪获取罄锤峰峰体高精度点云数据,对点云数据进行精细建模后,真实呈现了峰体的阶段数字信息,为后期对峰体的综合保护应用(模拟、监测、分析等)提供了可靠的基础信息数据。利用该方法不仅能够解决常规测量无法在峰体上布设监测点的问题,而且能实现对峰体整体变化趋势的分析,以及对变化较大区域的变化量估算。
本文仅对三维激光扫描技术在磬锤峰的扫描监测上进行了初步的实施和研究,具有一定的局限性。在未来的工作中,将加入无人机航测手段[15],以期获得磬锤峰顶部更加完善的数据,再进行系统分析。通过数据对比,不仅能相互印证两种方法的精度,还能弥补两种监测方法各自的不足,也可为管理者提供更为精确完整的数据,为文物保护提供多种监测方法。
猜你喜欢
小学生作文·小学低年级适用(2025年2期)2025-03-05 00:00:00
中学生数理化·八年级物理人教版(2021年12期)2021-12-31 03:23:02
中学生数理化·高一版(2020年11期)2020-12-14 07:35:24
家庭影院技术(2018年4期)2018-05-09 07:07:52
测绘工程(2018年3期)2018-03-20 03:05:12
幼儿智力世界(2016年11期)2017-02-21 14:20:57
现代营销·经营版(2015年3期)2015-04-20 06:46:58
测绘学报(2015年4期)2015-01-14 03:01:28
大地测量与地球动力学(2014年3期)2014-02-13 05:44:02
河南城建学院学报(2014年2期)2014-02-09 03:03:10