
一种基于位置识别的室内场景点云配准方法
2023-09-05 06:27牛学超
测绘通报 2023年4期
牛学超
(1. 广州市城市规划勘测设计研究院,广东 广州 510060; 2. 广东省城市感知与监测预警企业重点实验室,广东 广州 510060)
实景三维是对人类生产、生活、生态空间进行真实、立体、时序化反映和表达的数字虚拟空间,为经济社会发展和各部门信息化提供了统一的空间基底。部件级实景三维产品用于精确表达物体,服务个性化应用,是实景三维中国建设的重要组成部分。其中,大型公共建筑物的实景三维产品可以应用于应急救援、智能导航等服务[1-3]。
为生产大型建筑物的实景三维产品,需要获取完整的高精度三维点云。地面激光扫描仪(terrestrial laser scanner, TLS)和移动扫描系统(mobile laser scanner, MLS)是获取高精度三维点云的常用手段。TLS具有毫米级的扫描精度,可以作为高精度三维点云的获取工具,但在视线通达度较差的室内场景下容易被遮挡,想要获取完整点云,需要布设多个架站进行扫描并拼接,因此TLS不适合采集室内点云。MLS作为新兴技术,针对室内场景的点云采集任务具有较大的优势[4]。但其核心技术,即同时定位与制图技术(simultaneous localization and mapping,SLAM),在长时间运行的情况下易导致轨迹漂移,从而使建图效果变差[5]。因此在大型的室内场景下,为避免获取低精度点云,需将整体采集工作分为两段或多段进行,并将分段采集的点云进行自动化拼接,这对提高数据采集效率具有重要的意义。
针对无靶标的自动拼接问题,国内外开展了较多研究,本文主要讨论两两拼接。多数研究中自动拼接均采用粗配准到精配准的二级配准策略[6]。针对两个相邻点云,粗配准用于计算一个六自由度(位置和姿态)的近似估计。精配准将粗配准的计算结果作为初始猜测,根据几何约束优化转换参数。在粗配准研究中,常用的是基于手工设计特征的方法,包括特征提取和确定匹配关系两个步骤。文献[7]提取了关键点,并计算关键点的局部特征描述符,根据局部特征描述符的相似性确定关键点的对应关系,获取转换参数。文献[8—9]针对局部特征描述符进行了创新,提高了配准精度。但上述方法在计算关键点和局部特征描述符的过程中需要较长时间,导致配准效率较低。文献[10]提取了线元素,文献[11]提取了平面元素,通过利用线特征或面特征之间的几何约束确定对应关系,从而提升配准效率。在精配准研究中,迭代最近点算法(iterative closest point,ICP)为主流方法。广义迭代最近点算法(generalized ICP,GICP)[12]在一定程度上提升了ICP的稳健性。点云重叠度较高时,上述方法可取得较高精度,但当点云重叠度较小时,上述方法稳健性较低。
为了解决该问题,本文提出一种基于位置识别的大型室内场景点云配准方法。通过位置识别确定重叠区域,采用对重叠区域进行配准的策略,从而提升计算转换参数的稳健性。
1 研究方法
利用移动激光扫描仪获取两段具有重叠区域的点云后,利用本文方法进行配准。流程如图1所示,主要分为两步:①通过位置识别的方案确定公共区域;②对公共区域内的点云进行配准,进而获取点云的转换参数。步骤①中,首先将源点云和目标点云进行室内空间分割,在每个空间内生成虚拟扫描,随后计算所有虚拟扫描的全局特征描述符,并通过计算相似度进行位置识别确定重叠区域。步骤②中,对重叠区域内的点云进行配准,获取转换参数后进行几何验证。基于刚体转换的基本原理,可以将重叠区域的转换参数作为整体点云的转换参数。室内空间分割采用了直方图波峰检测的方法[13],基于曼哈顿假设,该方法在室内空间划分方面取得了较稳健的结果。本节主要描述虚拟扫描、重叠区域确定方法及重叠区域的转换参数计算。
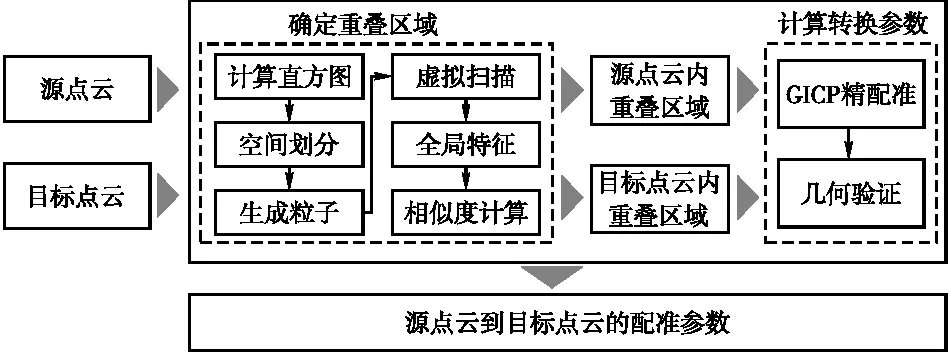
图1 本文配准方法流程
1.1 虚拟扫描

(1)
式中,Di表示点与虚拟激光雷达位置的距离;Vi表示点与虚拟激光雷达中心的垂直角度;Hi表示点与虚拟激光雷达中心的水平角度。
经过滤波后保留的点即为虚拟激光雷达获取的虚拟扫描包含的点。图2为虚拟扫描结果。

图2 虚拟扫描示意
1.2 基于全局特征描述符的重叠区域确定
虚拟扫描后,计算虚拟扫描的全局描述符,本文使用PGHCI全局特征描述符[14]。首先将点云进行栅格划分,如图3所示。

图3 点云栅格划分示意
通过统计栅格内点的数量和空间分布,将三维的点云编码转换为二维的特征描述符M。在栅格Bijk(i∈[Nd],j∈[Nh],k∈[Nv])内,该栅格的赋值vijk公式为
(2)
通过计算每个元素Mij获得二维特征描述符M,Mij的计算方式为累加相同行列的vijk。获取特征描述符后,可以通过计算两个特征描述符之间的相似性判断场景的相似性。相似性计算公式为
(3)
将两个点云包含所有虚拟扫描的全局特征描述符进行相似度计算,取最小相似度的两个虚拟扫描,当相似度小于阈值时,可以认为获取了重叠区域的虚拟扫描。
1.3 重叠区域转换参数计算

di=ti-Trsi
(4)
式中,di为ti和si的线性组合,也可以通过正态分布表示,公式为
(5)
通过最大似然估计(MLE)可以优化转换矩阵Tr,公式为
(6)
化解式(6),得
(7)
每个点的协方差矩阵通常其附近的K个点进行计算。根据文献[12],通过将协方差矩阵特征值代替为(1, 1,),使GICP转变为面到面的ICP算法,更适用于室内点云的配准模式。
GICP收敛后,计算配准得分,公式为
(8)
根据配准得分判断其是否符合标准,若不符合要求,则认为位置识别结果不正确,需重新寻找重叠区域。
2 试验及结果分析
2.1 试验数据及评价标准
为了验证本文方法的稳健性,选择斯坦福室内数据集S3DIS[13]作为试验数据。该数据集包括办公场所、会议室、展示厅、休息室、餐厅等常见的室内场景,共6200 m2。图4展示了其中一个区域。

图4 S3DIS数据集
采用相对旋转误差(RRE)和相对平移误差(RTE)作为精度评价标准,计算公式为
Δ=Hr(HG)-1=[ΔRΔT0 1]
(9)
式中,Hr代表估计的转换矩阵;HG为对应的转换矩阵真值。
2.2 配准精度评价
从数据集中选择4组具有重叠区域的点云,重叠区域均小于25%。在每一组内,对目标点云进行多次旋转平移(其中旋转8次,平移5次),利用本文方法对其进行转换参数估计。为了验证本文方法的稳健性,选择基于特征点的方法作为对比方法。选用内在形状直方图(intrinsic shape signatures,ISS)[15]关键点探测方法和快速点特征直方图(fast point feature histogram,FPFH)[16]局部特征描述子,在获取对应关系的过程中采用最近邻相似度比率(nearest neighbor similarity ratio,NNSR)策略。利用上述过程获取粗配准结果,精配准结果则使用GICP进行计算。
表1为本文方法在测试场景1下的多次计算结果。由表1可以看出,在不同的旋转角度和平移条件下,本文方法能够获取精确的转换参数。场景1中,平均RTE为0.011 m,平均RRE为0.067°。表2为本文方法与对比方法在4个场景的平均结果。由表2可以看出,在重叠区域较小的情况下,本文方法能够获得较好的参数估计结果。相对于场景1、场景2及场景3的计算结果,场景4的计算结果较差。其原因为,场景4的两个点云重叠率最低,重叠区域点云较少,导致转换参数的计算稳健性下降。4个场景中,本文方法的精度相较于基于特征点的方法均有较大提升。基于特征点的方法在源点云和目标点云中,寻找对应关键点。即使利用局部特征描述符和相应的策略可以提升对应点的匹配精度,但是在整个点云中寻找对应关键点使其稳健性降低。本文方法基于虚拟扫描,利用全局特征描述符确定重叠区域。仅有重叠区域点云参与转换参数的计算,相较于基于特征的方法,降低了寻找对应点的难度,从而提升了低重叠率点云之间的配准精度。图5为部分结果,可以看出,在重叠区域较小的情况下,相较于基于特征点的方法,本文方法能够精确地将具有低重叠区域的点云配准。

表1 不同方法在多场景下的平均配准结果

图5 不同方法配准结果对比
3 结 语
针对室内点云重叠率较低情况下现有配准方法无法稳健地计算转换参数的问题,本文提出了一种基于位置识别的建筑点云自动配准方法,并在公开数据集上进行测试。试验结果表明,本文方法在两个点云重叠率较低的情况下能够实现精确配准。但在室内场景下存在一些结构完全一致的房间,仅依靠激光雷达会导致位置识别失效,从而使转换参数计算错误。后续研究若结合视觉或室内Wi-Fi信息,加强位置识别的稳健性,可以进一步提升配准精度。
猜你喜欢
测绘学报(2022年12期)2022-02-13
科技创新与应用(2021年31期)2021-11-09
计算机应用与软件(2020年6期)2020-06-16
商情(2019年3期)2019-03-29
财讯(2018年22期)2018-05-14
数字通信世界(2018年1期)2018-04-18
测绘科学与工程(2017年5期)2017-05-07
现代商贸工业(2016年35期)2016-04-09
中国炼油与石油化工(2015年4期)2015-06-22
弹箭与制导学报(2015年1期)2015-03-11
