水下主动电场面形阵列布置及成像方法研究
2023-09-02 11:26:24杨汶洁彭杰钢王家琦
数字海洋与水下攻防 2023年4期
杨汶洁,彭杰钢,*,徐 林,王家琦
(1.电子科技大学 自动化工程学院,四川 成都 610000;2.武汉第二船舶设计研究所,湖北 武汉 430202)
0 引言
海洋蕴藏着十分丰富的可利用资源,而水下探测技术是海中资源找寻和开发过程中的关键一环。现如今人们对海底探测仪器在面对黑暗无光的复杂环境时的近距离物体探测精度和装置快速反应需求越来越高。同时,人们更希望能便捷地将探测装置布置于水下遥控探测器上,使得探测器应用场景更加灵活。因此,一种基于主动电场定位原理的探测方法开始更广泛地进入研究人员的视野中[1-2]。
主动电场探测的思想源自仿生学研究。自20世纪50年代,生物学研究者在亚马逊流域的河流中发现了一种鱼类,这种鱼类通过自身放电组织(Electric Organ Discharges,EODS)发射幅值1 V左右、频率不超过1 000 Hz的低频微弱电场。当电场在水中传播时,若传播途中有物体存在,电场在水中的空间分布会发生畸变,此类鱼则通过电场感知器官获得畸变电场的信息,指导自身进行各项生命活动。科学家因此称其为弱电鱼[3]。
研究者的实验发现弱电鱼的电场感知器官能够精确识别出1%的电场幅度变化。依靠电场发射器官和感知器官,弱电鱼可以进行逃避猎杀、捕食、导航定位等活动[4-5]。研究者将这种探测方式命名为水下主动电场定位。依靠这种生物机理,弱电鱼能够在完全黑暗无光、环境复杂浑浊的水中生存[6-7],并能全方位地感知周围环境,获得如周围物体的位置、大小、形状和组成等全面的环境信息[8-9]。
基于此,以仿生工程学界对主动电场相关研究为铺垫,通过布置发射电极模拟弱电鱼电场产生器官,以阵列设计模拟弱电鱼电场感受器官构建实验系统,以探测阵列上各点的电场能量强度变化为出发点,探究成像方法,既为人为构建弱电鱼电场定位器官提供了新的尝试,扩宽了主动电场水下探测应用方案,也丰富了水下探测方法种类,为水下探测及成像提供了全新的思路。
1 主动电场基本探测模型
主动电场探测方法依旧处于研究起步阶段,其完全对应的数学模型还在探索当中。由于电场探测过程本身的非线性和复杂性,其模型还处于相关研究人员探索中。国内外研究中,一般通过电偶极子模型说明主动电场探测基本原理。对于理想带电粒子Q,空间中任意位置的电场强度可表示为
式中:ε为电导率,受频率影响;表示距离为r的位置与带电粒子Q之间的矢量距离。
若空间中存在2个等量异号的理想带电粒子Q+和Q-,它们的距离为d,构成1对电偶极子。那么在这2个带电粒子之间的某一位置的电场强度可表示为
式中:Q为2个带电粒子Q+和Q-的电荷量;分别为该点与Q+和Q-之间的矢量距离。
在现实情况下,不同物体由于其形状大小、电阻率与电导率等不同会对电场产生不同影响。若在电场中放入一个球形物体,那么可得
式中:为该球形物体处因该物体存在而产生的电势扰动;ρ1为水环境电阻率;ρ2为球形物体的电阻率;a为球形物体半径;为电偶极子形成的电场强度;ε1为水环境的介电常数;ε2为球形物体介电常数;f为发射信号的频率;有角频率ω=2πf;为该球体球心到电偶极子的矢量距离。当环境中不存在物体时,即ρ1=ρ2,ε1=ε2。此时可得
式(4)说明,没有物体存在于电偶极子构建的电场中时,电场本身没有被影响,也就反应了没有探测到物体存在。同样,若发射电极发射信号为直流时,此时f=0,因此ω=0,可得
若电场中存在1个电阻率为0的超导体时,此时ρ2=0,代入式(3)可得
而若电场中存在1个电阻率为无穷大的绝缘体,那么相对于环境电阻率来说ρ2≫ρ1,并且绝缘体的电导率也远小于环境电导率,即ε2≪ε1,则可得
由式(4)–(7)可见,电场信息的改变与自身环境的电阻率、电导率、发射信号的频率等有关,更与目标物体的形状、距离以及电导率等物理因素相关。基于此可知,若发射一个已知的电场信号,对不同物体,由于其形状、电导率等与环境不同,则电场会在该处发生由物体引起的变化,而电场变化必然引起接收信号的改变,从而能够通过研究接收信号变化实现对该物体的探测。
该模型说明物体存在与否、几何特征、电导率差异及位于探测电场中位置不同均会影响探测结果。但该模型只是主动电场探测方法在工程应用上的一个近似模型,实际探测时由于物体材质、形状等不同导致周围电场的非线性变化,其模型建立的困难很大,到现在还没有准确的模型能完全符合参数与结果的一一对应。后文的实验是从工程应用角度出发,为了验证其探测有效性及设计一种可用的成像方法,在控制了影响如物体材料、距离和发射信号等变量之后所进行的探究实验。对完全未知情况的探测,还需要更进一步研究[10-11]。
2 实验装置与环境
2.1 阵列布置
仿照弱电鱼电场发射器官与电场接收器官,布置发射电极与接收电极,构建的探测系统模型如图1所示。发射电极产生一个已知方向和大小的电场,并与接收电极一起影响电场。电场稳定后,通过比较接收电极探测到物体前后的电势差计算出电场的改变程度。
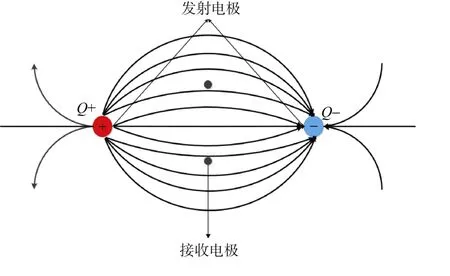
图1 模拟弱电鱼探测模型Fig.1 Simulated weak electric fish model
由主动电场探测模型可知,物体存在将使得电场产生十分明显的变化,其中包括幅值变化。处于平稳水环境中的电场将是稳定可测的,而将物体置于电场环境中时,接收信号的幅值会大幅改变,通过这样的变化,可以通过幅值测量实现物体探测。
在综合考虑探测有效性和装置的可实现性上,本文选择16个电极构成面形接收电极阵列。整个阵列中,发射电极为1对电偶极子,对称分布于接收电极阵列两侧。接收电极阵列中,16个接收电极按照4×4排列等距分布在一个正方形区域内。每个电极宽度为6 mm铂片电极。将这些接收电极置于一块搭载板上固定,接收电极两两之间距离均为48 mm,发射电极与接收电极阵列板的距离固定,得到阵列的二维平面图,如图2所示。

图2 电极阵列俯视图Fig.2 Top view of electrode array
对于该实验,我们将三维空间中的物体探测简化为二维平面上,保证每次实验探测时被测物体在空间垂直高度上距离接收电极阵列相同,除被测物体外其余实验条件均不变,则电极与物体的相对位置与实际测量时的俯视图相同,可将实验转化到二维平面上表示。这样设计既能简化实验,使得装置便于安装制造,又能控制实验变量仅为被测物体。
2.2 实验环境
实验环境包括模拟水下环境和实验平台。使用一个尺寸为90 cm×57 cm×40 cm的长方体水槽,加水之后通过加盐和泥土等浑浊物模拟水下环境。控制模拟水环境基本参数为水温25 ℃,电导率为3.78 mS/cm。
实验测试平台主要完成数据产生、采集与分析工作。实验中,信号发生器产生发射信号,通过数据采集卡USB-6289传输信号至发射电极,发射电极将信号发出构建水下主动电场环境。电脑通过程序控制数据采集设备接收电极阵列的16路原始信号数据,并将数据存储到电脑上。同时,接收电极阵列板搭载于三轴步进电机上,通过电脑控制步进电机从而调整阵列位置。阵列高度以及位置合适后,可放入物体进行探测实验。实验平台及整体架构如图3所示。
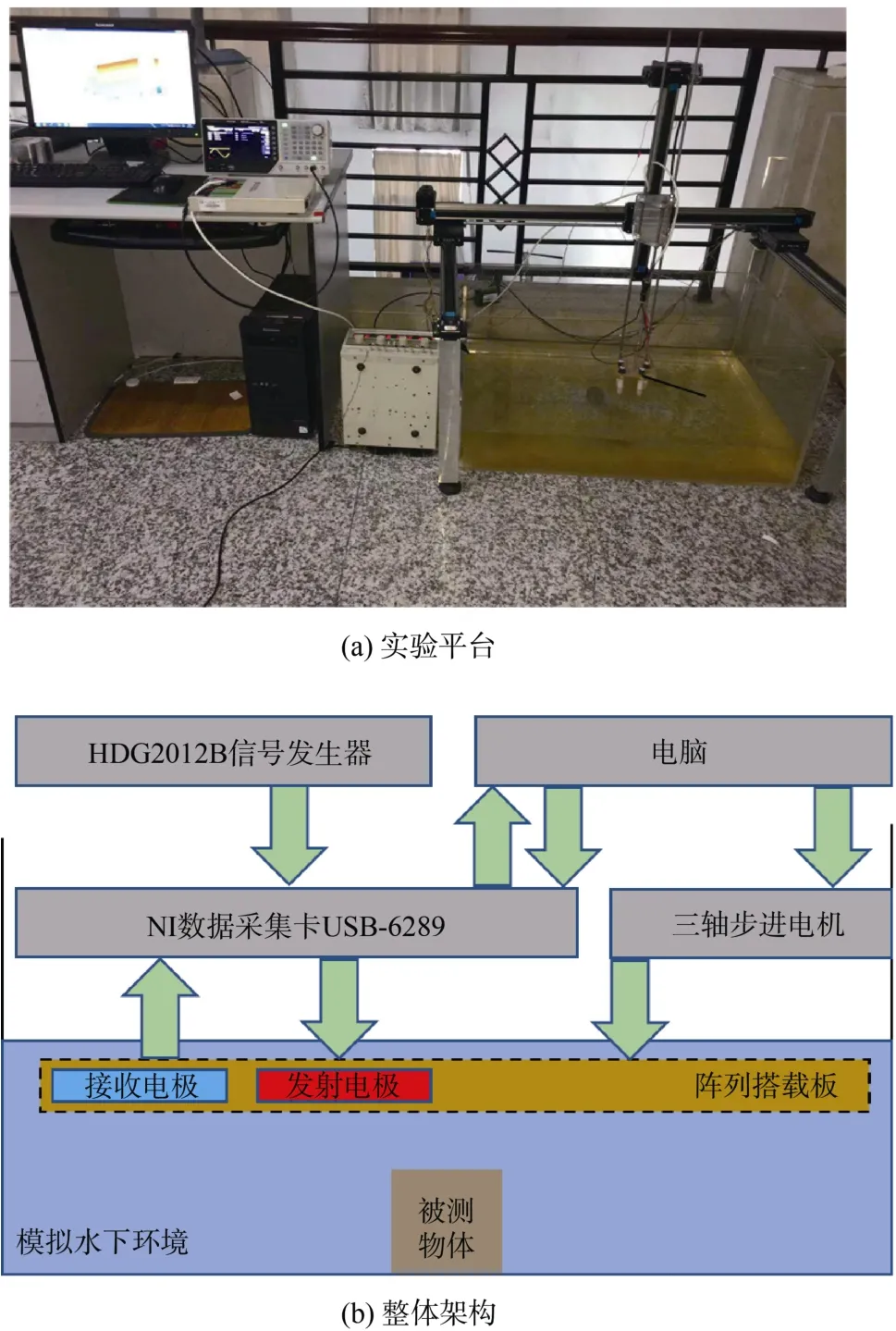
图3 实验平台及整体架构Fig.3 Experimental platform and overall structure
本实验采用铂片探测电极,发射电极为石墨电极。使用HDG2012B任意波形发生器发射频率为500 Hz、峰峰值为20 V的正弦波,信号经过USB-6289输出到发射电极。同时USB-6289还为数据采集装置,负责接收探测电极的信号数据。实验过程中采样率设定为10 000 Hz,USB-6289采集到原始数据后,使用计算机上具有信号、数据处理能力的Labview软件程序控制管理数据采集与数据处理。三轴步进电机搭载的接收电极阵列如图4所示。

图4 接收电极阵列实物图Fig.4 Receiving electrode array image
3 成像方法与实验结果
实验中,4×4接收电极阵列采集的原始信号通过NI数据采集卡USB-6289传输到Labview软件中,通过Labview中的快速傅里叶变换(FFT)控件对采集到的500 Hz正弦信号进行处理,可将16路信号由时域信号转变为频域信号,并得到每路信号的有效值。
FFT是信号处理中常用的手段,对该实验中采集到的N点序列x(n),其离散傅里叶变换(DFT)对为式(8),FFT为DFT的快速算法。通过FFT可得到信号的频率与幅值信息[17]。
16路信号预处理后结果如图5所示,可以看到阵列有效采集到了发射信号,将500 Hz频率分量下的16路信号幅值依次输出,形成数组作为进行成像的数据。

图5 16路信号频谱图Fig.5 Spectrum diagram of 16-channel signal
物体成像通过二维数组运算与图像插值算法实现。首先,将获得的16路一维数组转为4×4 二维数组,并使二维数组中数据与对应接收电极的相对位置相同。然后,将放入物体前后的数组进行差分,去除环境变量,得到每路信号的变化程度。设物体放入前测得的第i路幅值数据为ai,物体放入后测得的第i路幅值数据为bi,令ci=bi-ai则差分后,得到数组矩阵
该差分矩阵中数据位置与阵列中电极的二维平面位置对应,对相邻项之间使用y=ax+b线性插值补充颜色盒子中成像数据,使用强度图展示数据变化达到成像目的。
实验中,虽然探测到的信号强度会由于电极位置和方向不同而变化,但由于探测电极在使用是严格固定的,故成像时将放入物体前后的数据进行差分所得到的数据是严格的电场变化数据,即阵列几何尺寸和电极排布会影响数据采集时得到的16路信号的幅值,但对成像结果没有影响。最后,通过将得到的变化数组输出到强度表示图像中,并通过线性插值算法,可得到探测结果的二维图像。
根据如上阵列布置,并依照成像算法对数据进行成像,在实验平台上进行实验,可得到成像结果。实验选择二维几何形状为正方形、长方形、等腰直角三角形和L形的纯铜材料物体进行探测。物体相对电极阵列位置及二维成像结果如图6所示。
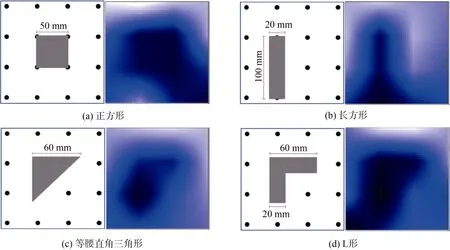
图6 物体相对位置及成像结果Fig.6 Relative positions and imaging results of objects
由图6可知,通过之前的阵列布置并配合成像方法,不同二维形状的物体,其强度图明显符合其几何特征,由此可以说明该强度图对不同几何形状的物体能够进行区分成像。其中,正方形与长方形的成像误差处集中在棱角周围,这是由于物体棱角处的电场畸变比平滑处大,产生的非线性波动较难判断。成像算法中使用线性插值是因为电极距离较近,探测信号幅值变化用线性变化近似代替,故会造成误差。等腰直角三角形与L形物体在成像效果上的差异也是由棱角处的电场畸变造成的。这些问题是由于主动电场探测技术并不成熟,针对主动电场探测原理的数学模型还没有建立,非线性变化还没有更好的探测及补偿方法,成像结果中的误差若要优化消除还需要进行更深入的研究才可能找到有效的优化方式。但是,基于以上实验可以预料,通过增加接收电极的数量以及改变电极阵列排布状态,探测及成像结果会得到进一步优化提升。并且,通过阵列布置的改变可将物体二维成像进一步推进到三维物体成像。实验结果充分说明了阵列布置及成像方法联合对于物体探测成像的有效性,并为后续工作打下了坚实的基础。
4 结束语
水下探测技术发展迅速,通过弱电鱼仿生研究而得到重视的主动电场探测技术为水下探测提供了全新的视角。针对黑暗复杂环境中的近距离物体探测,为了同时满足易于安装和使用的需求,本文通过阵列布置,给出了模拟弱电鱼电场产生器官和电场接收器官指导方法。同时,依靠控制变量策略,结合电场畸变导致电场幅值变化的特性,通过探测物体前后的数据差别以及线性插值算法得到成像方法。最后,通过以上设计,借助已有实验平台实现了对不同形状的简单物体探测与二维成像,验证了阵列布置和成像方法的有效性与可行性。综合来看,本文为弱电鱼主动电场的建立提供了新的尝试,丰富了主动电场水下探测应用方案,为水下探测及成像提供了全新的方案和思路。
猜你喜欢
中学生数理化(高中版.高考理化)(2021年11期)2022-01-18 05:46:08
建材发展导向(2021年13期)2021-07-28 07:14:34
通信电源技术(2018年5期)2018-08-23 01:16:26
江西建材(2018年4期)2018-04-10 12:37:34
江西建材(2018年1期)2018-04-04 05:26:52
浙江工业大学学报(2017年5期)2018-01-22 02:03:40
现代园艺(2017年23期)2018-01-18 06:57:46
新高考·高一物理(2016年7期)2017-01-23 02:52:50
中学生数理化·高二版(2016年9期)2016-05-14 13:19:35
技术与教育(2014年2期)2014-04-18 09:21:33