
神经网络在带式输送机张紧力控制系统中的应用与对比
2023-08-31 09:34:46吕杰
机械管理开发 2023年7期
吕 杰
(山西兰花科创玉溪煤矿有限责任公司, 山西 晋城 048214)
0 引言
带式输送机是煤矿生产中不可或缺的运输设备,其运输任务是靠输送带与滚筒之间的摩擦力作用实现的。因此,为保证带式输送机的运输任务对张紧力的要求较高。张紧装置作为输送带提供张紧力的系统,其关系着输送带是否能够正常有序的运行。但是,在实际生产中由于设备本身的工艺问题以及动态变化负载的影响,输送带在不同位置所承受的张力是变化的;同时,在不同的运输工况下带式输送机的张力也不同[1]。因此,对张紧力的合理控制保证输送带的张力在合理范围之内,对于实现输送带安全、高效的运行非常有意义。基于神经网络算法设计一套前馈控制模型实现对带式输送机张力的提前预测,而后为其提供合理的张紧力。
1 前馈控制系统概述
带式输送机张紧装置前馈控制系统主要实现对张紧装置张紧力的提前预判并控制。根据其功能要求以及其实现的原理,可将前馈控制系统划分为如图1所示的四部分。
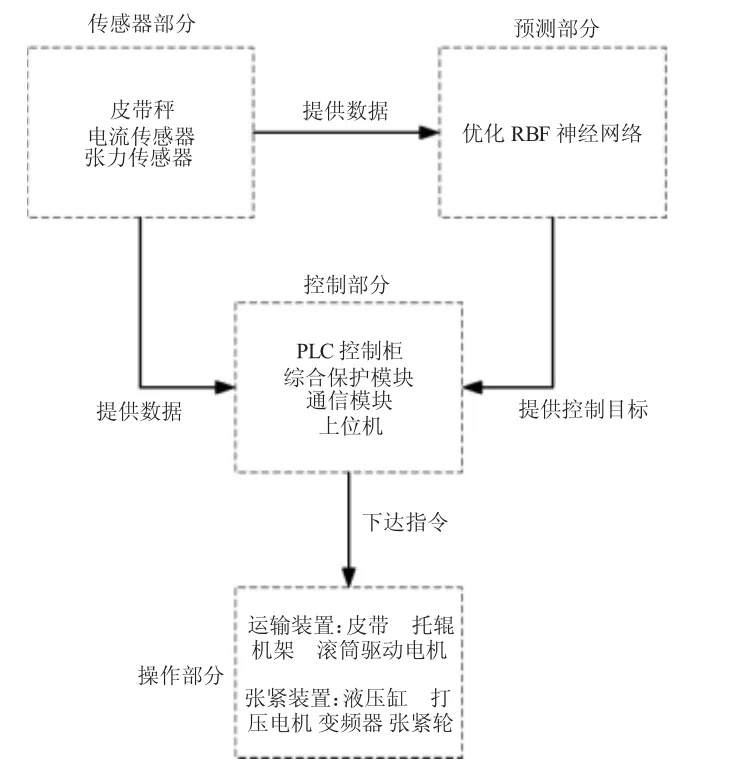
图1 张紧装置前馈控制系统结构组成
如图1 所示,带式输送机张紧装置前馈控制系统包括传感器部分、预测部分、控制部分以及操作部分。其中,传感器部分主要包括皮带秤、电流传感器以及张力传感器;皮带秤对输送带上实时煤炭运量进行检测;电流传感器对带式输送机驱动电机实时电流进行检测;张力传感器对输送带的实时张力进行检测。本系统的核心在于根据传感器部分所检测到的输送带的实时工况并采用优化的RBF 神经网络算法实现对输送带张力的提前预测,为后续下达指令提供依据。基于预测部分可实现对输送带张力提前1 min 的预测,而后将预测值传递至控制部分,在PLC 控制器的作用下将指令传递至变频器、打压电机等机电部件,在液压缸和张紧轮等执行机构的作用下实现对张紧力的调整控制[2],前馈控制系统对应的控制流程如图2 所示。
为供应商生产原材料j的0-1变量,生产不生产为供应商对制造商供给原材料j的0-1变量;为制造商生产产品q的0-1变量;为制造商对销售商提供产品q的0-1变量;为销售商内部处理产品q的0-1变量;为t时期销售商对消费者销售产品q的0-1变量;为t时期消费者使用产品q的0-1变量;为t时期回收商从消费者回收产品q的0-1变量;为t时期产品q维修的0-1变量;为t时期回收商回收产品q处理的0-1变量;为t时期回收商向供应商供给原材料v的0-1变量。
由于工程地质条件较为特殊、复杂,因此,施工前期进行了必要的开挖填土施工,且把黏土作为主要的填土材料,保证其承载力要求。
当预测系统判断下一分钟需要提供张紧力时,前馈系统会立即控制打压电机提高转速的同时打开进液阀,保证液压缸的压力在1 min 内达到预设值。并实时根据预测部分的结果对液压缸的压力进行实时调整。

图2 前馈系统控制流程
2 前馈系统控制策略及神经网络预测算法的优化
考虑到系统升压响应速度较慢且升压较难的实际问题,当检测到需要降低输送带张力,系统并不会在提前打开卸压,而会根据后续三种的检测的结果判断是否需要卸压。当后续3 min 检测到的张力还需下降时,前馈系统控制液压缸的压力降低至前3 min 对应的压力值。该种控制策略,可以避免液压缸压力下降过快对系统造成冲击,从而延长系统的使用寿命。
2.1 前馈系统控制策略
2.1.3 升压控制策略
神经网络控制算法的应用效果在很大程度上决定于网络隐含层节点中心、基宽向量、权向量三个参数的合理性和有效性[4]。为保证最终带式输送机张紧力的控制效果,本系统采用差分进化算法对网络隐含层节点中心、基宽向量、权向量是哪个参数进行优化,具体优化流程如图3 所示。
为了实现前馈系统的快速响应特性,但输送带张紧力不变时,系统采取保压控制策略,即将与对应液压系统的液压缸阀门全部关闭;但是,打压电机此时并未完全关闭,当下一阶段需要升压时系统能够快速将打压电机转速达到预设值,并打开进液阀,在短时间内达到升压的目的。
2.1.2 降压控制策略
液压缸是带式输送机张紧装置的直接执行元件,根据张紧力的控制过程可将液压缸的工作状态分为升压、保压和降压。为保证前馈系统功能的正常实现一方面是可对带式输送机输送带下一分钟所需张紧力的提前预判,另一方面是保证执行元件可按照预定要求完成对液压缸工作状态的控制。因此,本节就上述两个方面展开研究。
根据输送带的实时工况,当张紧力符合要求时,液压缸保压即可;当输送带下一分钟张紧力需要升高,液压缸需要升压;反之,液压缸需要降压。但是,液压缸的上述三个工作状态的响应速度存在一定的差异。从原理上讲,液压缸的保压和降压响应速度较快,即很容易达到预定目标;液压缸的升压需要通过打压电机配合变频器打开进液阀缓慢实现其功能,其响应速度较慢[3]。针对上述三种不同工况对应不同的动态响应特性,前馈系统在应用时需采取不同的控制策略。
预防使用质子泵抑制剂对慢性肾脏病患者上消化道出血有效性和安全性的Meta分析 …………………… 聂 丹等(24):3435
除了海内外展商静态和动态的全方位展示之外,主办方将围绕乡村振兴大背景下行业普遍关心的热点话题,三产融合高效推进的成功案例,以及绿色农业、循环经济等核心议题策划多场同期活动。
隐形渗透。如介绍“哈雷彗星”“塔特尔彗星”等,在试用版(上海)高中地理新教材中,介绍了“月球的表面特征”,指出月球上的环形山大多以著名天文学家或学者的名字命名[3],如贝利环形山、哥白尼环形山等,这里隐含着对上述天文学家和科学者的敬仰与纪念。
2.2 神经网络控制算法优化
2.1.1 保压控制策略
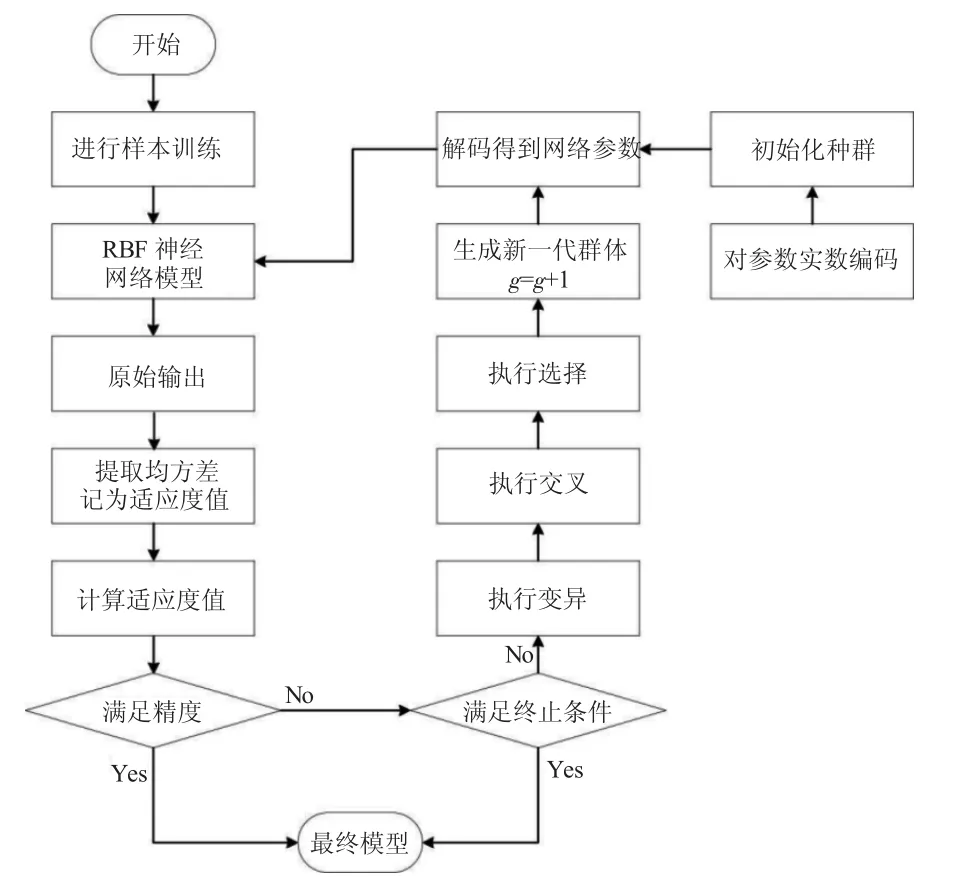
图3 基于差分进化算法优化神经网络控制算法流程
3 输送带张紧力控制系统的应用
对带式输送机所需张紧力预测可通过张紧装置电机电流进行反应。因此,本节通过基于差分进化算法优化后的神经网络控制算法对输送带张紧力的预测精准性通过对其电流进行预测精准性判断预测效果。
3.1 平稳工况下的预测效果
在平稳运行工况下,带式输送机驱动电机的转速基本处于恒定值,输送带上的负载由于煤炭粒度直径大小不均匀,在合理范围之内波动。在优化后的神经网络控制算法下,预测电流值与实测电流值对比如图4 所示。
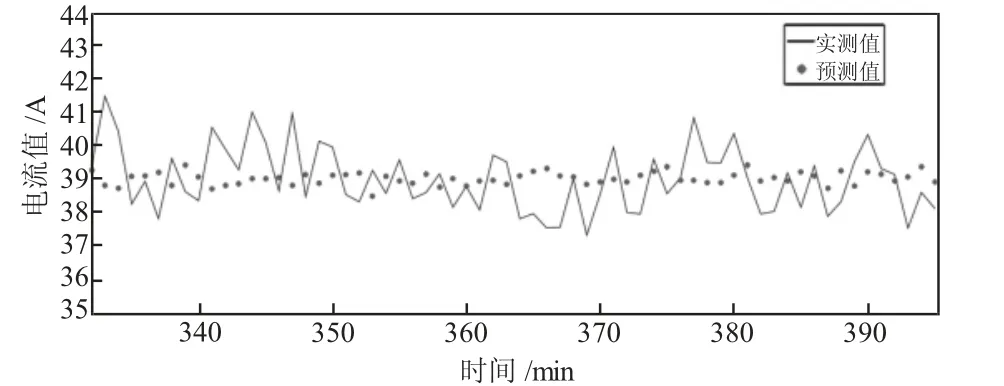
图4 平稳工况下张紧装置电流预测效果对比
3.2 空载启动给煤工况下的预测效果
给煤工况是带式输送机在空载状态下进行启动,待完全启动后进行给煤操作,对此工况下输送带张紧装置电机的电流进行预测,并对预测值和实测值进行对比,对比结果如图5 所示。
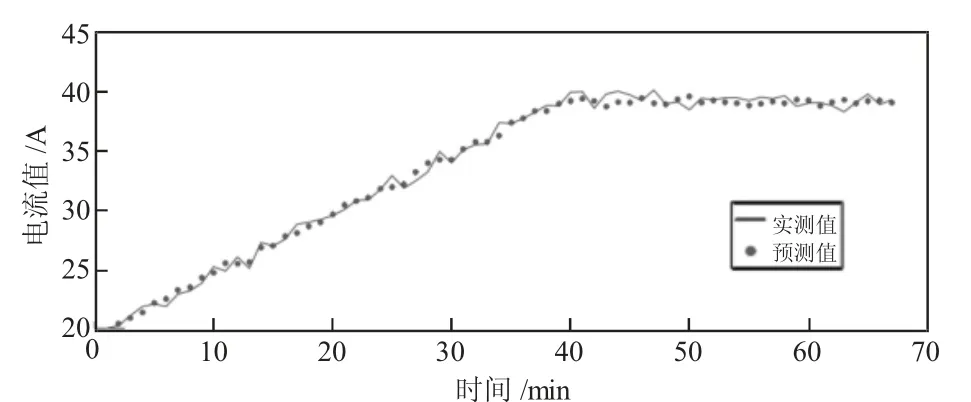
图5 空载启动给煤工况预测效果对比
如图5 所示,在空载启动给煤工况下对张紧装置预测电流与实测电流几乎吻合。
4 结语
带式输送机为综采工作面的关键运输设备,输送带的张紧力对于保证其与滚筒的摩擦力尤为重要。但是,在实际运输过程中由于负载的动态变化,需要对张紧力进行实时动态调整[5]。为此,本文提出基于差分进化算法对神经网络控制算法实现对输送带张紧力进行预测的概念,实现对输送带张紧力控制的效果和响应速度。
通过仿真分析可知,在平稳运行工况和空载启动给煤工况下均可以对刮板输送机下一分钟的张紧力进行精准预测,为今后实践生产的推广应用奠定扎实的理论基础。
猜你喜欢
冶金设备(2020年2期)2020-12-28 00:15:26
重型机械(2020年2期)2020-07-24 08:16:20
冶金设备(2019年6期)2019-12-25 03:08:52
制造技术与机床(2019年11期)2019-12-04 05:49:50
设备管理与维修(2016年5期)2016-03-16 02:20:53
石油化工建设(2015年6期)2015-12-01 04:17:35
橡胶工业(2015年10期)2015-08-01 09:06:02
橡胶工业(2015年6期)2015-07-29 09:20:32
橡胶工业(2015年2期)2015-07-29 08:29:56
电视技术(2014年7期)2014-03-11 15:36:57
