
50 000 kN 液压支架试验台中梁复合定位调高方法研究
2023-08-29 06:51吴成峰万传旭张建卓
矿山机械 2023年8期
吴成峰,万传旭,王 涛,陈 策,张建卓
1山东兖矿智能制造有限公司 山东邹城 273500
2辽宁工程技术大学机械工程学院 辽宁阜新 123000
液压支架试验台是测试各种液压支架操作性能、密封性能、支护性能、适应性能、让缩性能、结构强度和疲劳寿命是否达到国家或国际标准的重要装备。在对液压支架进行不同项目的压架试验时,液压支架试验台中梁需要移动到规定高度,并通过销轴穿过试验台承载立柱销轴孔和中梁销轴孔进行固定,在插拔销轴之前,需要确保中梁上的销轴定位孔中心与立柱上对应的销轴孔中心重合,才能保证顺利插拔销轴,在插拔销时不损伤销轴或销轴孔表面。
国内学者对中梁高精度定位展开了深入研究。刘欣科[1]研制了液压支架试验台升降平台精准定位控制系统,将位移传感器检测到的位置与节流阀流量相结合,保证升降平台的定位精度。沙宝银等人[2-3]采用高精度齿轮分流马达为 4 根升降液压缸分配流量,并通过位移传感器反馈偏差,实现中梁高精度定位调高。赵忠辉[4]考虑负载不均匀特性,每根升降液压缸设置比例阀,通过位移传感器的数据得到液压缸间的位移偏差,通过工控机实现对每根升降液压缸的单独控制。王阳阳[5]将视频识别技术应用到液压支架试验台调高系统中,采用 SolidWorks 中的虚拟相机对构建的三维模型虚拟录像,通过对图像的灰度曲线特征判断中梁运动是否到位。
以上学者大都采用位移传感器解决液压支架试验台中梁调高精确定位问题,但本次设计的 50 000 kN 液压支架试验台加载立柱高度达到 17 m,加之大量程位移传感器精度有限,特别是试验台立柱高度受温度影响,存在热胀冷缩现象,受环境温度影响最大误差达到约 6 mm,而所设计的销轴、销轴孔配合间隙只有 2 mm,所以仅仅通过位移传感器进行闭环控制精度有限,使用每个销孔固定高度值作为位移传感器的定位标准不能满足定位精度要求。基于上述问题,提出 50 000 kN 液压支架试验台中梁复合定位调高方法。首先利用拉线位移传感器进行粗定位,再通过相机采集销轴定位孔与立柱销轴孔配合关系的图像,对其进行图像增强处理,使用自适应阈值的边缘检测算法提取销轴定位孔与立柱销轴孔的边缘,计算二者圆心在竖直方向的高度差,以此为基准完成对中梁调高的精确定位控制。
1 50 000 kN 液压支架试验台中梁复合定位原理
在插销之前,判断中梁是否运动到位十分重要。如果销轴定位孔圆心与立柱销轴孔圆心不重合,进行插拔销时会磨损销轴与销轴孔表面 (见图1),减少设备寿命。
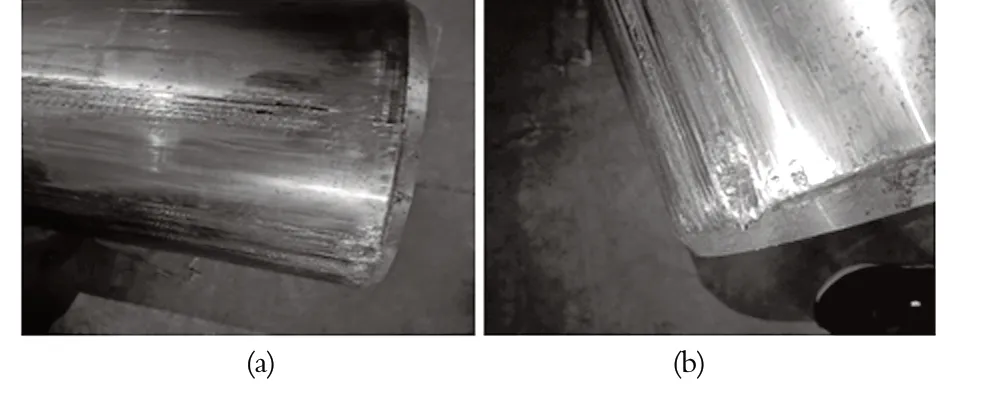
图1 销轴表面损伤Fig.1 Surface damage of pin
50 000 kN 液压支架试验台中梁复合定位调高系统如图2 所示,由分布在试验台 4 根立柱旁的升降液压缸通过 4 个伺服阀独立调节,中梁 4 角分别安装 4 个拉线位移传感器进行位移反馈闭环控制。由于采用 4 处独立位移闭环控制,避免中梁在调高过程中受力不均造成的运动偏差,保证 4 个缸运动同步。当通过位移传感器控制达到设定高度后,控制系统将位移反馈由拉线位移传感器转换为机器视觉检测位移反馈,通过相机检测销轴定位孔圆心与立柱销轴孔圆心的位置偏差 Δx,实现中梁的精确定位,消除温度效应和传感器测量误差,保证插拔销顺利进行。

图2 50 000 kN 液压支架试验台中梁复合定位调高系统结构Fig.2 Structure of composite positioning and height adjustment system of middle beam for 50 000 kN hydraulic support test bench
系统所用相机分辨率为 2 560×1 440,则机器视觉定位精度可由下式得到:
式中:ξ为单位像素定位精度;F为物体距离透镜中心的距离,F=800 mm;d为成像平面的高度,d=3.6 mm;f为透镜的焦距,f=6 mm。计算可得单位像素的定位精度ξ=0.33 mm。
液压支架试验台立柱销轴孔间距为固定值,中梁调高过程中位移传感器以此定值倍数加第 1 孔中心高度作为立柱每个销轴孔的高度值。复合定位调高方法采用的控制策略为:首先设计一个阈值,如 10 mm,当中梁实际位移与目标位移差值大于此阈值时,将支路选择变量b值置 1,采用拉线位移传感器进行闭环控制;小于阈值时,b值置 0,采用机器视觉精确定位方法介入控制,对中梁调高进行精定位,控制流程如图3 所示。

图3 控制流程Fig.3 Control process
2 机器视觉精确定位方法
考虑到现场实际情况,在视觉定位过程中易出现光照不均现象,若直接对相机获取的原始图像进行边缘提取,效果较差,因此采用 Retinex 理论改善图像光照不均现象,降低光照不均对特征提取的影响。对增强后图像采用自适应阈值的 Canny 边缘检测方法进行边缘提取,提取边缘点坐标。通过销轴定位孔和立柱销轴孔在图像中运动范围固定的先验知识筛选数据点,然后通过最小二乘法拟合销轴定位孔特征圆与立柱销轴孔特征圆,以二者圆心坐标差值作为位移偏差反馈量,将此反馈信号输入液压伺服闭环控制系统中,对中梁进行精确定位控制。视觉定位流程如图4 所示。

图4 视觉定位流程Fig.4 Visual positioning process
2.1 Retinex 图像增强算法
相机工作时受环境光照不均的影响,获得的图片质量参差不齐,严重影响后续的边缘识别。针对该问题,采用多尺度 Retinex (Multi-scale Retinex,MSR) 算法对图像进行处理。
Retinex 理论认为物体颜色只与自身对不同波长光的反射能力有关,光照强度只影响图像灰度值范围,故物体自身的固有属性不受外界光照的影响。Retinex 增强理论的流程为估计出原始图像的低频照度图像,从原始图像中减去照度图像即可得到包含高频分量的反射图像。单尺度 Retinex 算法 (Single-scale Retinex,SSR) 公式[6]为
式中:(i,j) 为第i行第j列的像素;Rk为k通道的反射图像;Gk为k通道的原始图像;Zk为k通道的照度图像。
照度图像Zk通常由低通高斯函数与原始图像进行卷积运算得到,则上式变为
式中:F(i,j) 为低通高斯函数;*为卷积运算;σ为尺度参数。
尺度参数σ对单尺度 Retinex 算法的图像增强效果影响较大,σ取较小值时,图像边缘保持较好但颜色容易失真;σ取较大值时,图像不易失真,但细节易丢失,图像不清晰。笔者采用 MSR 算法[7-8],利用多尺度分析的思想,对图像进行不同尺度的分析和处理,使得算法对不同尺度下的图像细节能够有针对性地进行处理,从而更好地保留图像细节和纹理。其算法公式如下:
式中:wn为与低通高斯函数Fn(i,j) 相对应的权重系数;n为低通高斯函数个数。
使用 MSR 算法对相机获取的图像进行增强处理,效果如图5 所示。
2.2 自适应边缘检测与特征圆拟合
边缘检测是识别承载立柱销轴孔、销轴定位孔特征圆的关键。Canny 算法[9]常用于检测、提取图像边缘,但由于该算法需要手动设置高、低阈值,难以适应复杂多变的光照条件,因此使用 Otsu 算法[10]自适应寻找最佳分割阈值。该算法将图像分为背景与前景,当阈值为T时,前景图像平均灰度为g1,背景平均灰度为g2,两者占图像比例分别为p1、p2。类间方差表达式为
式中:∂为类间方差。
当类间方差 ∂ 值最大时,对应的阈值T为高阈值TH,而低阈值TL=TH/2。边缘检测效果如图6 所示。

图6 边缘提取效果对比Fig.6 Comparison of edge extraction effect
由图6 可知,使用自适应阈值得到的图像边缘相比于使用固定阈值的方法,边缘信息更加丰富,有利于后续对特征圆进行提取。
使用先验知识方程对检测得到的边缘数据点进行筛选,根据销轴定位孔与立柱销轴孔中心点在图像中心附近的先验知识,建立数学模型。当边缘数据点符合该模型时,将其作为特征候选点,模型表达式为
式中:R1与R2为先验方程的半径边界;w为图像宽度;h为图像高度;xm、ym分别表示像素m的坐标。
经测试发现,特征候选点中仍存在部分噪声无法去除,影响特征圆边缘拟合质量,降低了其定位精度。因此对特征候选点进行去噪处理。在处理分辨率为 2 560×1 440 像素的采集图像时,数据点间距大于 5 pixel 及点群数量小于 5 的数据判定为离群点,将其剔除。
以销轴定位孔识别为例,首先采用自适应边缘检测方法提取图像边缘,然后对提取出的边缘数据使用先验方程进行筛选,最后使用最小二乘法对销轴定位孔进行特征圆拟合,特征圆识别流程如图7 所示。

图7 销轴定位孔特征圆识别流程Fig.7 Process of identifying feature circle of pin positioning hole
图7(a) 为原始图像,图7(b) 为经过图像处理后的边缘图像,图7(c) 为经过先验方程筛选后的特征候选点,图中 7(c) 浅色的数据点虽为特征候选点,但满足离群点的判断条件,因此被当做离群点剔除。利用最小二乘法对深色的特征点进行拟合,得到的销轴孔特征圆如图7(d) 箭头所示。

3 试验验证
50 000 kN 液压支架试验台中梁复合定位调高系统实物如图8 所示。
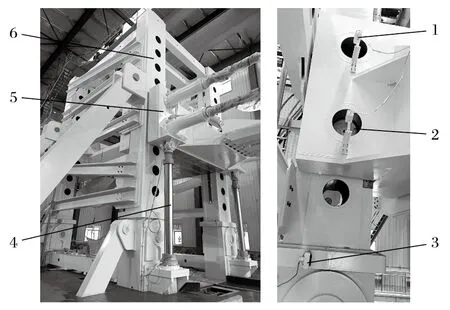
图8 50 000 kN 液压支架试验台中梁复合定位调高系统实物Fig.8 Physical object of composite positioning and height adjustment system of middle beam for 50 000 kN hydraulic support test bench
使用中梁调高复合定位方法对中梁运动过程中相机采集到的图像进行处理,最终视觉检测系统识别销轴定位孔、立柱销轴孔效果如图9 所示,图中右上角数值表示二者圆心坐标。视觉精定位方法可以在中梁运动过程中识别立柱销轴孔与销轴定位孔特征圆,拟合出二者圆心坐标。
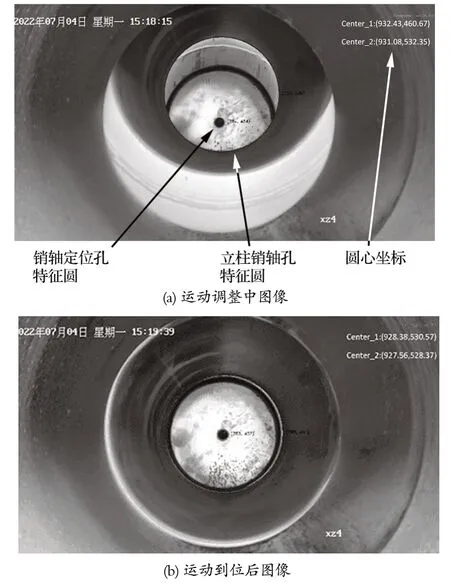
图9 视觉精定位效果Fig.9 Precise visual positioning effect
由图9 可知,该方法可以较好识别销轴定位孔、立柱销轴孔的边缘,并实时计算其圆心位置,当二者圆心距离小于设定值 0.5 mm 时,认为中梁运动到位,可以进行插销动作。
4 结语
针对 50 000 kN 液压支架试验台中梁调高受温度效应与拉线式位移传感器精度的影响,无法单独依靠位移传感器实现中梁精确定位控制的问题,提出一种中梁复合定位调高方法。该方法以拉线位移传感器作为粗定位基准,结合图像处理方法完成中梁精确定位,并采用多尺度 Retinex 方法对图像进行增强处理,使用自适应阈值的 Canny 边缘检测算法对立柱销轴孔、销轴定位孔进行边缘提取,通过筛除后的数据点提取立柱销轴孔和销轴定位孔的圆心高度差作为液压伺服控制系统的位移反馈偏差,完成中梁精确调高控制,控制精度达到 0.33 mm,保证了插拔销顺利进行。
猜你喜欢
装备制造技术(2021年4期)2021-08-05
冶金设备(2021年2期)2021-07-21
煤矿机电(2020年5期)2020-11-02
煤矿现代化(2020年3期)2020-05-13
甘肃农业(2019年10期)2019-12-03
科学与财富(2018年7期)2018-05-21
装备制造技术(2018年12期)2018-02-26
哈尔滨工程大学学报(2016年11期)2016-12-12
锻压装备与制造技术(2015年2期)2015-06-26
机械工程师(2015年10期)2015-02-02
