
基于51单片机的道岔基坑积水报警系统设计
2023-08-26 04:33章珍珍刘庆华严成骏贺章擎
电脑知识与技术 2023年20期
章珍珍 刘庆华 严成骏 贺章擎

关键词:51单片机;温度传感器;报警装置;监测电路;水位监测;道岔基坑
中图分类号:TP368.1 文献标识码:A
文章编号:1009-3044(2023)20-0135-03
0 引言
在城市轨道交通信号系统中,转辙机正常、稳定的工作是列车行驶的安全保障[1]。目前武汉市轨道交通线网内正线转辙机均安装于下沉式道岔基坑内,位置低于轨道平面,容易发生基坑积水造成转辙机进水。据2022年最新统计,武汉市轨道交通全线网共有50余处道岔基坑,存在不同程度的积水现象。长期以来,由于基坑积水过深造成转辙机进水的安全事故频发,尤其是新线建设过程中,区间排水不畅,常发生道岔基坑积水导致转辙机进水,从而导致转辙机性能下降。如图1所示,传统通过人工巡视进行肉眼观察,存在误差大、主观性较强等问题,且由于人力有限,往往不能及时发现隐患。
近年来大量关于道岔基坑积水安全检测的方法被提出,本文根据武汉市轨道交通运营的实际情况,基于51单片机,提出了一套完整的道岔基坑积水监测报警系统和实时排水装置。
该检测报警系统总体包括具有三档水位的水位检测报警模块[2]、阈值可调的温度检测报警模块、持续高温报警、涨率检测报警模块、排(进)水电机驱动电路模块,PWM波调节电机速率模块以及报警提示电路模块。
电路通过protues进行仿真验证并焊接了实物,成功地运用到武汉市轨道交通线网道岔基坑积水监测中。实践证明,该套装置能够节省人力成本、提升检测效率,保证转辙机正常工作。
1 整体设计要求
本设计采用的控制系统为51 单片机,CPU 为AT89C51;开机初始化后,界面显示当前水位、电机转速、温度、水位涨率;若水位小于低水位阈值,电机顺时针转动,进水(在本场景中未涉及进水,故只需将该阈值设置为0即可),且水位越低,电机转速越快。若水位大于等于第一档阈值,LED黄灯亮,电机逆时针旋转,排水。水位大于等于第二档阈值,LED红灯亮,电机速率加快。水位大于等于第三档阈值,蜂鸣器响[3],电机全速运作。高水位各档水位阈值相差为30cm,且高低水位阈值均可调;温度报警阈值为50℃,当高温持续时间超过30min,此时排水电机继续工作可能有死机的危险,蜂鸣器响,提醒工作人员进行降温或关停;水位涨率超出阈值,预计此时即使排水电机全速工作,也无法使水位下降,蜂鸣器响,提醒人工排水,该水位涨率阈值可调;同时设计手动排水按钮,第一次按下时,电机全速工作,第二次按下,电机关停,如此循环;通过功能切换按钮进行页面的切换,页面一为测量显示界面,页面二为水位阈值调节界面,页面三为温度阈值调节、涨率阈值显示界面。
2 硬件电路设计
2.1 总体电路
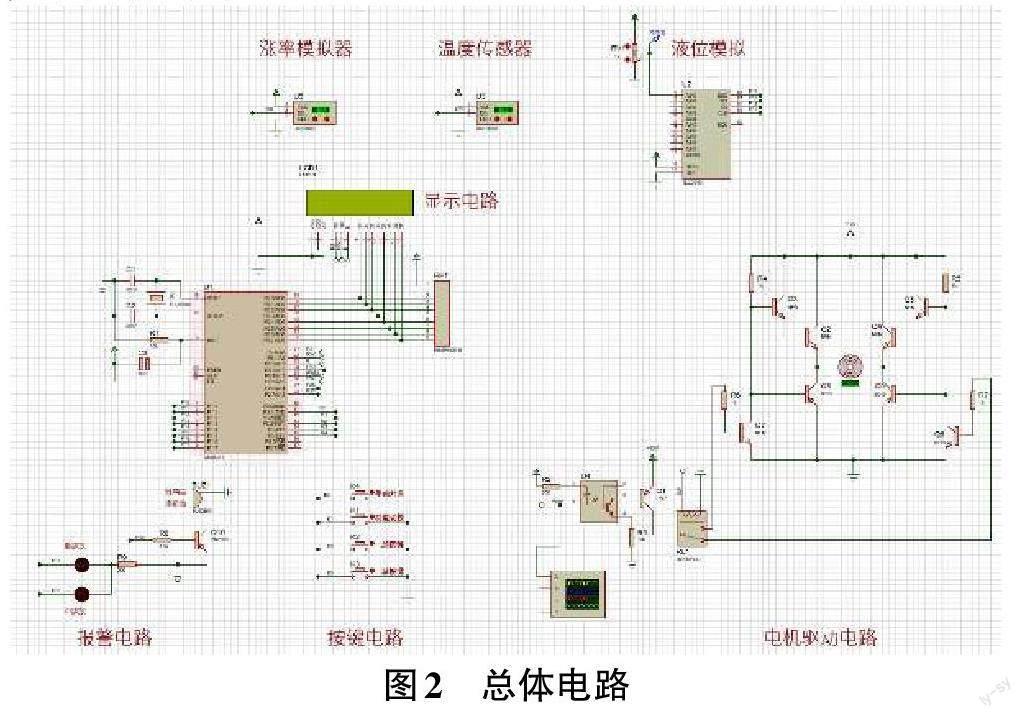
总体电路包括液位模拟器、涨率模拟器、温度传感器、显示电路、按键电路、报警电路、电机驱动电路,如图2所示。
2.2 液位模拟
在测试电路中,通过滑动电阻阻值对应的电压,模拟液位的变化[4]。实际电路中采用电容式液位传感器,因为液位变化将会引起电容变化,故只需通过测量物质的导电率即可得到液位。该种传感器灵敏性较高、动态响应好且没有自热现象。ADC 采用TLC2543芯片,SDO端接P1.0,SDI端接P1.1,CS端接P1.2,CLK端接P1.3。该芯片可进行12位串行的数据转换,在本设计中能够满足要求。由于此时仅有一个模拟输入量,转换通道仅一条,为AIN0。
2.3 温度传感器
温度传感器[5]采用DS18B20,定义该芯片的总线I/O接口为P2.3。其独特的单线接口方式大大节省了单片机的开支。通过测试手册可知,该芯片在-55~ 125℃的测温范围内,固有测量误差最大为1℃,抗干扰能力较强。該芯片能够提供9至12位的可编程设备温度读数,越高的位数对应数字格式最大值越大,如本设计中采用12 位,此时温度的分辨率为0.0625℃,数字格式为750毫秒。该芯片体积较小,简单进行防水封装后能够胜任本设计的使用场景。
2.4 涨率模拟器
在实际电路中采用节流式流量计,进行水位涨率的测量。通过流量计中节流件在雨水流过前后的压差和流速的关系,将压差值做一定的数学变换即可得到流体的流速,即对应涨率。在protues中没有相应电子元件[6],为方便展示效果,采用与2.3节中同样的传感器芯片进行模拟。涨率报警是根据实际情况额外进行开发的装置。该功能适用于武汉强降雨天气,在水位未达到阈值之前进行报警,可留下充足的抢修时间,利于工作人员前往现场。
2.5 显示电路
显示电路采用LCD1602,在初始化时,首先采用三次显示模式设置,不检测忙信号。接着进行显示模式的设置,此时要求检测忙信号,进行8位、2行、5×7 点阵的设置。清屏后,字符进入屏幕不动、字符后移的模式。最后进行开显示和关光标的指令。
2.6 按键、报警电路
按键电路均采用独立式按键[7]、查询方式触发。包含功能切换、加按键、减按键、电机手动开关按键。报警电路分为LED灯光报警和蜂鸣器报警,后者采用2N2905PNP三极管提供大电流,进行功率驱动。
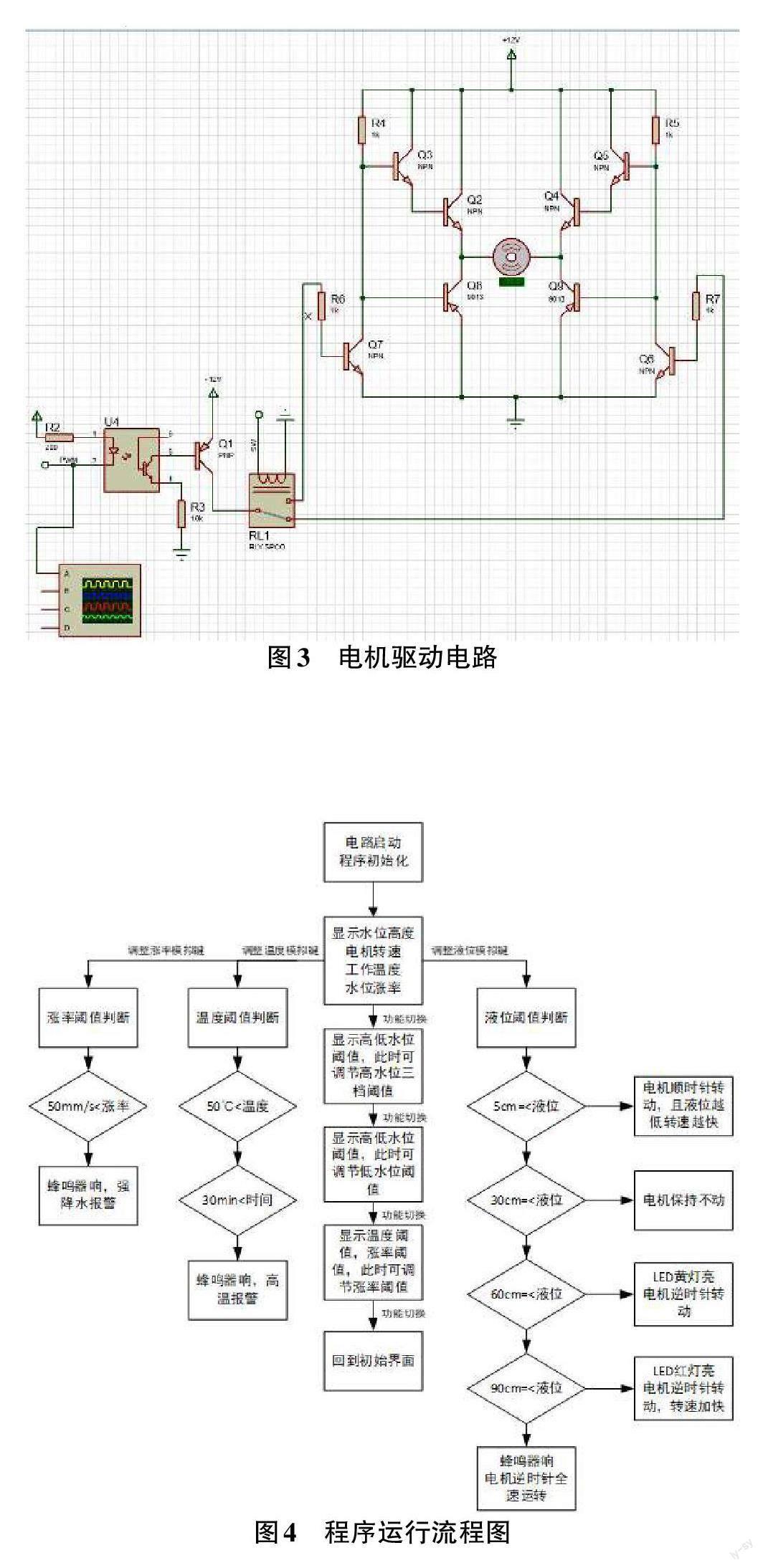
2.7 电机驱动电路
电机驱动电路包括光耦合NPN型三极管,单刀双掷继电器线圈、功率驱动电路组成。通过电机发送出不同占空比的PWM波,能够使二极管产生不同强度的光照,进而产生光电流,经过功率放大电路后驱动电机产生适应水位的转速,如图3所示。本设计中电机极限转速约为384r/s。继电器部分可控制电机进行正反转,对应进水和排水。
3 软件程序设计
3.1 流程图
整个程序运行的流程如图4所示。
3.2 电机转速控制
通过实时检测水位值,进行电机转速的调控是本设计的核心点。采用的方法是通过不同占空比的PWM波进行控制。通过配置定时器T0,产生1ms的定时,在内部设置计数信号,达到所设定阈值后,翻转PWM波,最终达到电机转速的改变。
4 仿真与验证
通过keil 进行代码段的调试与仿真,在proteus 8.15中绘制对应原理图。仿真结果与设计要求符合。购置相应电子元件后,结合武汉市轨道交通运营不同转辙机实际的工作环境,部分安装了该报警系统,实践证明了该系统的可行性,如图7所示。
5 结束语
本文所提出的基于51单片机的道岔基坑积水报警系统,焊接电路后运用到武汉市轨道交通2号线金银潭道岔基坑积水的监测中,预期设计目标的功能均达到要求。该设计还可应用到其他类似的水位监测报警环境中[8]。实际说明,本设计测量精度高、监测响应速度快、监测成本低。
猜你喜欢
中国民间疗法(2021年12期)2021-07-28
中国生殖健康(2020年2期)2021-01-18
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2020年1期)2020-09-21
铁道通信信号(2020年10期)2020-02-07
小太阳画报(2019年11期)2019-12-06
铁道通信信号(2019年3期)2019-04-25
铁道通信信号(2018年10期)2018-12-06
铁道通信信号(2018年10期)2018-12-06
中国生殖健康(2018年2期)2018-11-06
