基于空间句法的滨水公园空间优化研究
——以后湖国际艺术园为例
2023-08-25 05:36郑宣宜张楠
智能建筑与智慧城市 2023年8期
郑宣宜, 张楠
(中南大学建筑与艺术学院)
1 引言
城市公园是构成城市生态系统、丰富城市景观的重要元素。伴随着时间推移,城市公园已经形成许多种类,滨水公园便是一种。滨水公园可理解为城市中临河流、湖沼、海岸等水体的带状绿地,能够为城市提供良好的生态效益、美化城市居民的生活环境。滨水公园有其独特的空间结构和构成方式,了解其空间组织方式、提出相应的空间优化策略、提升其空间利用率,是值得研究的重要课题。
2 研究对象与研究方法
2.1 研究对象
后湖国际艺术园位于湖南省长沙市岳麓区渔湾路与潇湘中路交叉口,面积约74hm2,其周边被由中南大学、湖南大学等组成的大学城和部分居住区环绕。自20世纪90年代至今,后湖由最初的渔场开始经历了数次变迁,逐步形成了现在的后湖国际艺术园。时至今日,后湖已经发展成为集旅游、文化、商业、艺术等多种功能性质于一体的综合性艺术园区,具有独特的艺术氛围和商业价值。
后湖国际艺术园依后湖而建,属于滨水公园。其水域面积为42hm2,占总面积56%。目前园区共分五个区,其中A、B、C区以文化体验、艺术交流和生态休闲为主,D、E区则以产业孵化和时尚体验为主。各分区相互之间具有互通性,相互连接,集多种功能于一体(见图1)。

图1 后湖国际艺术园区卫星图
2.2 研究方法
本次研究采用定量分析,即在实地调研的基础上,收集有效数据并进行分析,所采用的定量分析为空间句法。空间句法理论认为,空间是空间关系的总和,在分析特定空间时,应着重分析其中存在的空间关系,用数学方法对空间关系进行分析。
在本次研究中,采用空间句法中的视域分析,对全域可行层和可视层进行分析,并进行整合度、连接度等一系列数据分析,对园区进行详细、系统、全面地分析,进而得到后湖的空间组织方式和空间布局规则。
3 结果分析
3.1 视域分析
运用视线分析法,建立可视层模型和可行层模型[1],可从这两个层面对后湖空间进行分析。
手动建立可视层和可行层模型,导入depthmap软件进行计算,得到相应的连接度、整合度、协同度以及可理解度数值,并基于得到的数值进行分析。其中,连接度反映空间渗透性,二者呈正相关;整合度反映空间可达性,整合度越高,可达性越强;协同度反映空间组构特征,组构核心越少,协同度越高;可理解度反映空间结构理解难易程度,可理解度越高,空间结构越易理解。
3.1.1 可行层分析
可行层指一定区域里游客和城市居民能够到达的空间。包括建筑间的空间和游览路径。
从后湖全域可行层整合度模型(见图2)中可以看出,D区整合度最高,其次是ABC区,E区则排在最后。D区临湖一段整合度最高,是后湖全域的最佳观景点。园区内整合度较高的区域位于园区的东南侧,这里场地相对平整开阔、设有多个可通行停驻的小广场,可达性强、视野开阔。
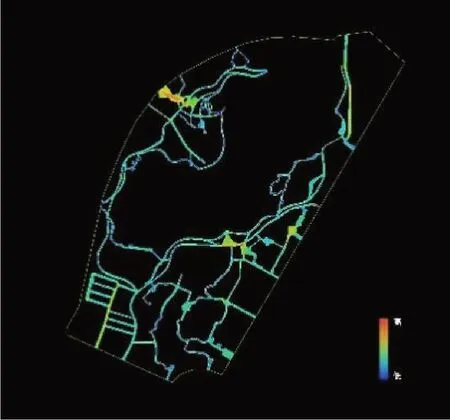
图2 可行层整合度模型
ABC区的整合度比D区低一些。这里的公共活动场地数量较少,整体区域面积偏小,游览路径分布较曲折,建筑分布也较密集,一定程度上对游览路径造成了一定阻碍,降低了该片区的可达性。E区的整合度是后湖全域中最低的。这里的空间较狭长局促,建筑分布密集,几乎没有公共活动空间,是整个园区中可达性最低、整合度最低的区域,较为隐蔽。
能够积极发现生活中生物学科存在的问题,针对生物学的现象进行提问、观察、实验设计与实施方案的结果进行讨论与研究,在开展不同工作的同时,都很愿意和团对合作.
连接度越高,渗透性越强,该片区在整个空间中也就更重要。后湖园区的连接度(见图3)整体偏低,渗透性强的区域较少。其中,各分区的入口广场和后湖园区内的开敞空间连接度较高,大多位于B区和D区,而临湖步道的形态较为狭长曲折,连接度在后湖园区中最低,与其他空间的渗透关系也偏弱[2]。

图3 可行层连接度模型
后湖可行层可理解度(见图4)未能形成有规律的散点图模型,这是因为其空间连接度与整合度之间的关联较弱,空间结构无序,整体空间结构不易理解。这说明,后湖园区的空间分布没有逻辑,不利于游客的空间感知和观光体验。

图4 可行层可理解度(R2=0.0009)
可行层协同度(见图5)较低,园区的空间组构核心过多,各道路之间的关联性不强,彼此的连接缺乏合理性,游客在园区内行走游览时,会因道路的无序性和过多的小核心而影响自身的空间观赏体验。

图5 可行层协同度(R2=0.002)
3.1.2 可视层分析
可视层即游人视线可以到达的区域,在可视层模型中,我们将高于人体视线的建筑轮廓绘出,视为遮挡物。
可视层整合度(见图6)最高点为湖中心,整个湖泊的整合度都偏高,紧邻湖水地带视野开阔,此外,各片区入口广场处整合度也较高。这些区域的视线可达性很高,由此可知,后湖湖泊的观赏视野在园区中最好,入口广场其次,其余区域较差。

图6 可视层整合度模型
后湖可视层连接度(见图7)呈现由湖中心向四周逐渐变低的态势,在与城市道路打开处有一定的回升,整体来看具有明显的向心性。湖泊区域的连接度高,视线渗透性较好,各建筑片区的可视性均偏低。在城市道路打开处,由于建筑量少,视野较开阔,其可视性相较于建筑片区也偏好。

图7 可视层连接度模型
可视层模型的可理解度较高(见图8),空间的连接度与整合度关联性较强,可视层的空间结构和空间关系都更符合游客的认知范围和理解范围。整体来看,可视层的可理解度较高,空间关系便于理解。

图8 可视层可理解度 (R2=0.94)
由于后湖的可视层是以后湖湖泊为单核心的空间组构,因此其协同度也较高(见图9)。单核心的空间组构方式更为清晰简明,其中的空间关系也更容易理解。对比来看,可视层模型的可理解度和协同度均高于可行层模型,带来的空间体验更佳。

图9 可视层协同度(R2=0.98)
3.2 后湖园区空间结构评价
3.2.1 空间使用率
空间使用率是评价空间结构效能的重要指标之一[3],与空间可达性和可理解度呈正相关。后湖空间的可理解度低,空间整体的可识别性很差,各空间缺乏自身的独特特征,因此其空间使用率也不高。而这与后湖自身空间结构复杂、紊乱有很大关系。
3.2.2 空间可识别性
空间可识别性是评价空间品质的重要因素,也是为游客提供视觉指引的指标。高识别性的空间能够为游客提供更好的视觉指引。空间可识别性的高低与可理解度相关,可理解度高的空间其识别性也高,能够帮助游客更好地快速理解空间。后湖的可理解度过低,其空间可识别性也较差,游客在后湖园区中通常无法及时获得路径指引。
3.2.3 空间可达性
空间可达性是空间内游客流量的影响因素之一,可达性高的空间往往人流量也更大。空间可达性的高低取决于整合度,空间整合度越高,可达性也就越高。后湖空间南部区域的可达性高于北部,其游客流量也比北部区域要大。南部区域场地开阔、路径通达,其空间可达性以及给游客带来的游览体验都比北部区域要好。
4 策略与建议
结合上述分析,我们针对后湖园区空间目前存在的问题和不足指出,提出如下改造策略[4]。
4.1 优化园区路网结构,合理设置开敞空间
在园区现状的基础上,科学合理地布置并优化路网,尽量对园区道路进行等级分类,调整不同片区的路网密度,保证人车分流。对既有道路进行优化修建,完善园区路网结构,增加空间可达性。此外,合理规划设计游客游览路线,丰富游览路线的观赏性和趣味性,提升游客在游览路线的空间体验和视觉体验。
在优化路网结构的同时,也要注意开敞空间的布置。在建筑密集、公共空间不足的区域应合理规划设置与该区域相适配的开敞空间,确保游客在后湖园区的各个区域游览时都能有良好的空间体验感,避免因建筑密集、环境逼仄而降低空间舒适度。
4.2 打造空间节点,丰富空间形式
打造多个空间节点,丰富各个空间节点的趣味性,结合节点的周边建筑类型和景观,发掘其不同特点,并在打造空间节点时加以规划运用,增强空间的可识别性。同时注重丰富园区空间形式,增强空间可识别性和空间结构有序性,提升空间可理解度与协同度。
4.3 坚持以人为本,注重生态优先
在对园区空间进行优化设计改进时,要始终秉持着以人为本的原则理念[5],以为游客带来良好的游憩体验为宗旨,贯彻生态先行的理念。景观设计力求空间布局与生态布局和谐统一,打造各具特色的生态景观,推动园区建设的可持续发展。
猜你喜欢
小哥白尼(野生动物)(2020年9期)2021-01-18
数学小灵通·3-4年级(2020年11期)2020-12-14
阿来研究(2020年1期)2020-10-28
少年漫画(艺术创想)(2018年1期)2018-09-11
教育教学论坛(2017年26期)2017-06-19
新闻传播(2016年19期)2016-07-19
新世纪水泥导报(2016年1期)2016-07-01
天然产物研究与开发(2016年1期)2016-06-05
中央社会主义学院学报(2016年2期)2016-05-04
土木建筑工程信息技术(2013年1期)2013-10-17