
基于动态量化的电力系统事件触发负荷频率控制
2023-08-25 08:05:44丁三波张康杨飞生张家安
浙江大学学报(工学版) 2023年7期
丁三波,张康,杨飞生,张家安
(1.河北工业大学 人工智能与数据科学学院,天津 300401;2.西北工业大学 自动化学院,陕西 西安 710072;3.河北工业大学 电气工程学院,天津 300401)
在电力系统运行中,系统频率在微小范围内保持稳定至关重要.作为有利的辅助技术,负荷频率控制 ( load frequency control, LFC ) 通过维持电力系统供需间的动态平衡来保证系统频率运行在额定值,能够迅速抑制外界扰动所引发的频率变化[1-4].智能电网将信息网、电力网深度交互融合,实现了对电力系统的网络控制,通信网络成为信息传输的媒介[5-6].在网络带宽资源有限的情况下实现高效通信是研究的重点.为了降低通信负担,事件触发机制应运而生.“事件”表示与系统状态有关的一种判断条件,当条件成立时,传感器更新并向控制器发送信号,从而实现控制的目的.事件触发控制主要依据系统状态来判断触发时刻,实现了“按需通信”[7-9].
针对LFC系统的事件触发控制问题, Zhang等[10-12]进行了一系列研究,事件触发控制既能够有效地减少数据传输量,也能够保证系统的稳定运行.在网络攻击下,通过事件触发机制筛选出关键的控制信号,可以防御攻击,保证LFC系统的稳定性[13-15].通过将新能源电动汽车接入电网中,应用弹性事件触发机制,能够消除DoS攻击导致数据包丢失的不利影响[16].针对开放式通信网络具有通信延迟的问题, Yue等[17]提出延迟系统方法,设计事件触发控制器.自适应事件触发机制的阈值可以随时间动态调整,以减少不必要的通信[18].为了节约网络资源,本文在系统的反馈通道和前向通道中,分别设计加入指数衰减项和状态模拟项的事件触发机制,以降低触发频率.
LFC需要借助通信网络完成被控量的采集和控制量的下发,当信道的传输码率有限时,需要对信号进行量化处理.量化误差会削弱系统的控制性能,甚至导致系统失去稳定,因此对量化控制系统的稳定性分析一直是研究的重点.当基于动态量化的线性不确定系统受到未知、有界的扰动输入时,自适应控制器能够保证闭环系统的稳定性[19].对于基于动态量化控制的连续时间系统,借助稳定性理论可以推导得到闭环系统全局渐近稳定的充分性条件[20].当网络传输存在通信延迟时,利用基于时间触发的动态量化缩放算法能够保证系统的指数稳定性[21].对于量化误差对系统产生的不利影响, Zhou等[22]的研究表明,事件触发机制对量化误差具有一定的鲁棒性.当系统状态不易通过直接测量得到时,应用基于观测器的输出反馈控制器,利用量化器参数缩放算法能够保证线性系统的渐近稳定性[23].量化控制不仅能够改变系统输出,也能够改变控制输入.本文采用输入输出的量化控制方式,设计基于事件触发的动态量化器参数缩放算法,对量化控制系统进行稳定性分析.
本文研究基于动态量化的事件触发LFC问题.根据系统状态和动态量化参数,针对反馈通道和前向通道,设计加入指数衰减项和状态模拟项的事件触发通信机制,降低了触发频率,节约了网络资源.在反馈通道和前向通道中应用动态量化器,对测量输出和控制输入的触发采样信号进行量化控制,实现了信号的网络传输.利用基于事件触发的动态量化器参数缩放算法,保证了闭环系统输入到状态稳定,缩放变量异步更新,自由度更高.
1 系统模型
1.1 LFC系统
LFC系统的动态模型如图1所示.该模型是在科学假设下的区域单机等值等效模型,由发电机、涡轮机、调速器、控制器及通信网络等模块组成.图1中,Δf、ΔPm、ΔPv、ΔPd分别为系统频率偏差、发电机机械输出偏差、调节阀位置偏差、负荷扰动偏差,M、D、Tch、Tg、R、β分别为发电机转动惯量、发电机阻尼系数、涡轮机时间常数、调速器时间常数、转速降、频率偏差系数.

图1 单区域负荷频率控制系统的动态模型Fig.1 Dynamic model of one-area load frequency control system
相对于电压和功角快速变化的过程, LFC下的频率响应较缓慢,因此采用简化的低阶线性系统来表征平衡点附近的动态特性.频率调节过程可以简述如下: 电网的负荷变化造成系统频率偏离额定值,反馈机制根据频率偏差产生控制信号,调节涡轮机的输出功率增量补偿负荷变化量,从而控制系统频率回到设定值.基于各环节的传递函数和信号流向,得到频域下系统状态变量的动态方程组:
对式(1)进行拉普拉斯反变换,得到时域下系统状态变量的微分方程组:
对于单区域LFC电力系统, 区域控制误差(area control error, ACE)仅以维持区域内系统频率稳定为目标, 只包含频率偏差变量.
选择系统的状态向量和输出向量为
基于量化控制的LFC系统动态模型如图2所示,系统的状态空间表达式为
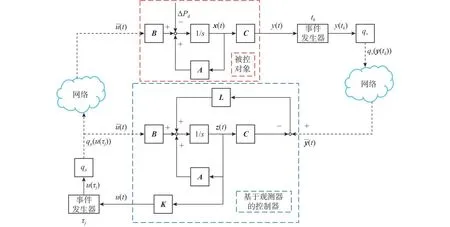
图2 基于量化控制的负荷频率控制系统动态模型Fig.2 Dynamic model of load frequency control system based on quantization control
式中:为量化的控制输入变量,ω(t)为负荷扰动变量,A为 系统矩阵,B为输入矩阵,C为输出矩阵,F为扰动矩阵.
式中:z(t)为观测器的状态向量,为量化的测量输出变量,K为反馈增益矩阵,L为观测器增益矩阵.
为了得出相关的结论,假设如下.
1)(A,B)能控,对于任意的正定实对称矩阵Qc(Qc>0),存在Pc>0满足
2)(A,C)能观,对于任意的Qo>0,存在Po>0满足
1.2 动态量化器
量化控制可将连续信号离散化,只需传输量化处理后的少量数值信号,可以大大降低对网络带宽的需求[20].在系统的反馈通道和前向通道设置动态量化器,对信号进行量化处理.
输出量化器可以刻画为分段函数qv:R→Dy,Dy为R的有限子集.令y∈R,设正实数My>Δy>0满足:
1) 若|y|≤My,则|qv(y)-y|≤Δy;
2) 若|y|>My,则|qv(y)|>My-Δy.
式中:My为y的量化范围,Δy为y的量化误差.
设置在反馈通道的动态量化器的数学模型为
式中:v为缩放变量.动态量化器qv(·)的量化范围为Myv,量化误差为Δyv.当v减小时,量化范围将成比例地收缩, 量化误差随之减小.在触发时刻tk,v(tk)简化为vk.
类似地,输入量化器qµ:R→Du,Du为R的有限子集.令u∈R ,设正实数Mu>Δu>0满足:1)若|u|≤Mu,则|qµ(u)-u|≤Δu;2)若|u|>Mu,则|qµ(u)|>Mu-Δu.其中Mu为u的量化范围,Δu为u的量化误差.
设置在前向通道的动态量化器的数学模型为
式中:µ 为缩放变量.动态量化器qµ(·)的量化范围为Muµ,量化误差为Δuµ.在触发时刻τj,µ(τj)简化为µj.
注1信号在带宽有限的网络中传输,须经过量化处理.量化器能够把采样信号转换成在有限集合中取值的数字信号.应用动态量化器不可避免地带来了量化误差, 削弱了系统的控制性能,甚至导致系统不稳定.对于信号量化产生的不利影响, Zhou等[22]的研究表明,事件触发机制对量化误差具有一定的鲁棒性.
1.3 系统运行分析
网络化控制的LFC系统动态模型如图2所示.图中,tk、τj分别为反馈通道和前向通道的触发时刻,y(tk)、u(τj)分别为触发时刻的测量输出向量和控制输入向量,qv(y(tk))、qµ(u(τj))分别为量化的测量输出和控制输入向量.
当电网的负荷发生变化时,反馈通道的传感器检测到电网频率的变化,事件发生器判断出触发时刻tk,采样输出向量y(tk)传输至动态量化器qv(·)进行量化处理.通过网络传输至控制器的是量化的测量输出向量y¯(t)=qv(y(tk)).
当控制器下发控制信号时,前向通道的事件发生器判断出触发时刻τj,采样输入向量u(τj)传输至动态量化器qµ(·)进行量化处理.通过网络传输至被控对象的是量化的控制输入向量u¯(t)=qµ(u(τj)),调节发电输出功率以满足负荷变化的需求,从而抑制电网频率的变化.
2 稳定性分析
利用李雅普诺夫稳定性理论,对基于动态量化的事件触发LFC系统进行稳定性分析, 证明触发过程中不会产生Zeno现象,对初始条件进行约束.为了便于分析,对观测器和控制器的设计过程分别进行讨论.
引理1[23]对于矩阵指数函数exp(A(t-t0))(其中A为常数矩阵,t0为常数),总是存在常数c、a(c、a>0),使得||exp(A(t-t0))||≤exp(a(t-t0))与||(d(exp(A(t-t0)))/dt)||≤cexp(a(t-t0))成立.
定义1[24]考虑误差系统e˙=f(t,e,ω),若存在KL 类函数δ和K 类函数∂,对于缩放变量的初始值v0和任意有界的负荷扰动输入ω(t),当t≥t0时,系统的解都存在且满足
则˙=f(t,e,ω)输入到状态稳定.KL类函数和K类函数的定义见文献[24].
2.1 观测器设计
定义状态估计误差为e(t)=x(t)-z(t),当t∈[tk,tk+1)时,e(t)的动态微分方程为
基于LFC系统(3)和观测器(4), 反馈通道的事件触发机制设计如下.
1) 通过加入指数衰减项的事件触发条件|y(t)-exp(-η(t-tk))y(tk)|≥αvkΔy来 判断触发时刻tk+1,其中η、α∈(0,1.0)是设定的常数.当满足触发条件时,事件发生器将y(tk)更新为y(tk+1).动态量化器对新的采样输出信号量化并释放至网络,从qvk(y(tk))更新为qvk+1(y(tk+1)).
2) 缩放变量vk与触发时刻tk一一对应.在触发时刻tk+1,若满足|y(tk+1)|≤ξvkMy,则vk+1=ξvk;否则vk+1=vk,其中ξ∈(0,1.0)为缩放系数.
定理1基于反馈通道的事件触发机制,可得如下结论.
1) 状态估计误差e(t)关于ω(t)输入到状态稳定.
2) 任意2次连续触发之间存在最小的间隔时间tD,当tk≥=max{t0,τ0}时,有tk+1-tk≥tD成立.
证明:选取Vo(e(t))=eT(t)Poe(t)为李雅普诺夫函数.当t∈[tk,tk+1)(tk≥)时,根据e(t)的动态微分方程(9)和反馈通道的事件触发机制, 对Vo(e(t))求导可得
定义
若||e(t)||≥Θk,则可得
当t∈[tk,tk+1)(tk≥)时,vk有界, 负荷扰动ω(t)有界,所以Θk有界.随着触发次数的不断增多,vk递减,e(t)全局一致最终有界, 且满足
根据定义1可知, 状态估计误差e(t)关于ω(t)输入到状态稳定.
接下来证明当tk≥时,有tk+1-tk≥tD成立.令Y(t)=y(t)-exp(-η(t-tk))y(tk)(tk∈[τj,τj+1)),对|Y(t)|求导可得
由引理1可知,存在常数a(a>0),使得
对式(13)两端积分,可得
计算可得
化简可得
间隔时间tD严格大于零,表明在反馈通道中不会产生Zeno现象.
注2在有效的控制过程中,尽管系统输出y(t)存在振荡现象,但整体上呈收敛趋势.引入指数衰减项,通过exp(-η(t-tk))y(tk)来拟合y(t).当η过小时会导致欠拟合,加入指数衰减项的控制效果不明显.当η过大时会导致过拟合,可能会造成触发频率过高.只有当η较恰当时,拟合效果会比较好,从而能够减小测量误差,提高触发难度,降低触发频率.参考系统状态的指数衰减率,η的取值范围可以通过近似地求解线性矩阵不等式ηPc+(A+BK)TPc+Pc(A+BK)<0获得,其中Pc为正定对称矩阵.
注3在反馈通道连续2次触发之间, 指数衰减项的持续作用可能使动态量化器对采样测量输出信号进行多次处理,所以动态量化器的更新由事件触发机制和动态量化算法共同作用决定.
2.2 控制器设计
控制器对发电机组的输出进行调整,平衡电量供给与负荷需求,从而稳定系统状态.前向通道的事件触发机制设计如下.
1) 通过带有状态模拟项的事件触发条件
来判断触发时刻τj+1,其中ε0、ε1、ε2∈(0,1.0)是设定的常数.当满足触发条件时,事件发生器将u(τj)更新为u(τj+1).动态量化器对新的采样控制信号量化并释放至网络,从qµj(Kz(τj))更新为qµj+1(Kz(τj+1)).
2) 缩放变量µj与触发时刻τj一一对应.在触发时刻τj+1,若满足|Kz(τj+1)|≤λµjMu,则µj+1=λµj;否则µj+1=µj,其中λ∈(0,1.0)为缩放系数.
定理2基于前向通道的事件触发机制,可得如下结论.
1) 观测器状态z(t)关于ω(t)输入到状态稳定.
2) 任意2次连续触发之间存在最小的间隔时间τD,当τj≥时,有τj+1-τj≥τD成立.
证明:以下的证明过程讨论了2类情况.第1类情况是tk≤τj≤τj+1≤tk+1, 即在前向通道连续2次触发之间, 反馈通道中未发生触发.第2类情况是tk≤τj≤tk+1≤τj+1, 即在前向通道连续2次触发之间, 反馈通道中发生了触发.
首先讨论第1类情况,当tk≤τj≤τj+1≤tk+1时,z(t)的动态微分方程为
选取Vc(z(t))=zT(t)Pcz(t)为李雅普诺夫函数,当t∈[τj,τj+1)(τj≥τ0)时,对Vc(z(t))求导,可得
由状态观测器的设计过程可知,当t∈[tk,tk+1)时,有||e(t)||≤Θk成立,可得
定义Φ=2[||PcB||(1+ε2)µjΔu+||PcL||((1+α+ε0)×vkΔy+||C||Θk)]/[(1-ε1)λmin(Qc)].若||z(t)||≥Φ,则可得
当t∈[τj,τj+1)(τj≥)时,µj和vk有界,Θk关于ω(t)有界,因此Φ有界.随着触发次数的不断增多,µj和vk递减,z(t)全局一致最终有界,且满足
根据定义1可知, 观测器状态z(t)关于ω(t)输入到状态稳定.
接下来证明当≤tk≤τj≤τj+1≤tk+1时,有τj+1-τj≥τD成立.
定义
其中ϕ=ε0(||PcL||/||PcB||)vkΔy+ε2µjΔu.对Γ(t)求导,可得
由引理1可知,存在常数c、m(c、m>0), 使得||d(exp((A-LC)(t-τj)))/dt||≤cexp(m(t-τj))、||exp(A+BK)(t-τj))||≤exp(m(t-τj))成立.
定 义φ=γ[c||z(τj)||+||Bqµ(Kz(τj))+Lqv(Cx(tk))||+||A+BK||||z(τj)||],可得
对式(22)两端积分,可得
计算可得
化简可得
式中:δ=ε1(λmin(Qc)/(2||PcB||)).
τD严格大于零,表明在前向通道中不会产生Zeno现象.
再讨论第2类情况,当tk≤τj≤tk+1≤τj+1时,z(t)的动态微分方程为
选取Vc(z(t))=zT(t)Pcz(t)为李雅普诺夫函数,当t∈[τj,τj+1)(τj≥τ0)时, 对Vc(z(t))求导,可得
当t∈[τj,τj+1)时,有||e(t)||≤Θk+1成立, 定理2有效,此处省略证明过程.
注4在前向通道中设计加入状态模拟项的事件触发机制,判断触发时刻τj+1.观测器在[τj,τj+1)的状态近似解是exp((A+BK)(t-τj))z(τj),相较于z(τj),状态近似解更接近于当前的观测器状态,减小了测量误差,降低了触发频率.
注5相较于文献[22],本文在LFC系统的反馈通道设计加入指数衰减项的事件触发机制,在前向通道设计加入状态模拟项的事件触发机制,既能够保证系统稳定运行,又能够降低触发频率,节约网络和计算资源.
2.3 初始条件
基于区域单机等值等效模型,利用稳定性理论分析基于动态量化的事件触发LFC系统的稳定性,得到闭环系统输入到状态稳定的充分性条件,排除了Zeno现象.由于动态量化器的量化范围是有限的,系统初始值须在量化范围内,初始条件的设定对系统稳定性分析十分关键.
定理3设定初始条件满足|y(0)|≤v0My, |Kz(0)|≤µ0Mu,t0=τ0=0, 则在定理1和定理2的事件触发控制下, 基于动态量化的LFC系统输入到状态稳定.
证明:在定理3的限定下,系统初始值在动态量化器的量化范围内.由定理1和定理2的证明过程可知,闭环控制系统输入到状态稳定.
3 仿真案例及分析
将设计的事件触发机制应用到基于动态量化的LFC系统中,开展仿真验证.基于单机等值等效模型,系统的相关参数如表1所示.表中,参数为标幺值[16].

表1 电力负荷频率控制系统的参数Tab.1 Parameters of load frequency control system
根据系统参数可知,系统矩阵、输入矩阵、输出矩阵、扰动矩阵分别为
反馈增益矩阵和观测器增益矩阵分别设定为
系统的初始条件设定为
动态量化器的相关参数设定为
信号的指数衰减率η设定为0.5, 在初始时刻t0=τ0=0s施加有界的负荷扰动信号,仿真时间设置为10 s,系统相关变量的响应曲线如图3~9所示.
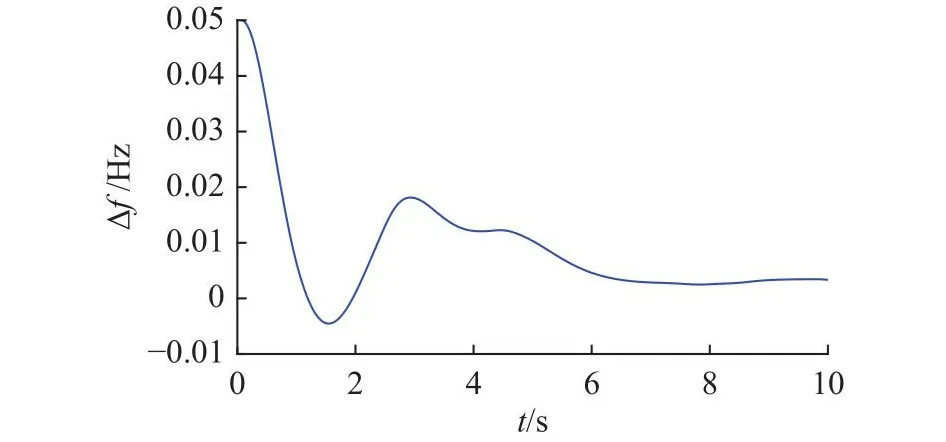
图3 系统频率偏差的响应曲线Fig.3 Response curve of system frequency deviation
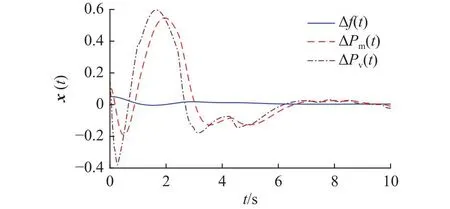
图4 系统状态的响应曲线Fig.4 Response curve of system state
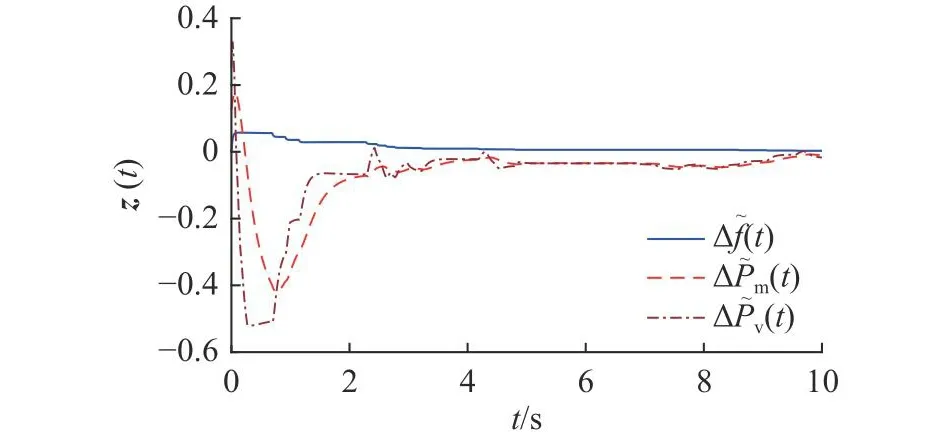
图5 观测器状态的响应曲线Fig.5 Response curve of observer state
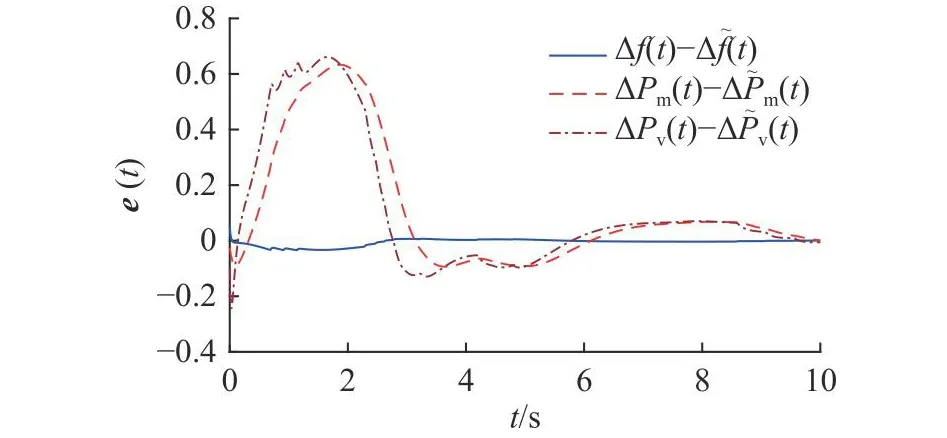
图6 状态估计误差的响应曲线Fig.6 Response curve of state estimation error
系统频率偏差、系统状态、观测器状态、状态估计误差的响应曲线如图3~6所示.
在有界负荷扰动信号的输入下,从图3可知,Δf从初始值0.05 Hz在1.5 s时被快速地控制到0 Hz附近,经过了振荡衰减过程,最终收敛至0.005 Hz以下,并且继续向平衡点0 Hz移动.Δf的变化过程迅速且平滑,控制精度较高,能够较好地完成频率调节的控制任务.系统状态和观测器状态经过初始阶段的振荡过程,在控制作用下快速地向平衡点收敛并趋于稳定.状态估计误差经过振荡过程迅速收敛,表明系统状态和观测器状态正快速地同步.
在初始阶段,负荷扰动信号和量化误差会共同加剧系统的振荡程度,但LFC具有自动修正系统频率偏离给定值的作用,因而能够消除内外扰动所引起的偏差,达成自动控制的目的.
动态量化器qv(·)和qµ(·)对y(t)和u(t)的量化过程如图7、8所示.缩放变量v(t)和µ(t)的异步更新过程如图9所示, 数值呈阶梯状递减, 使得闭环系统输入到状态稳定.

图7 测量输出信号和输出量化器的响应曲线Fig.7 Response curve of output signal and output quantizer
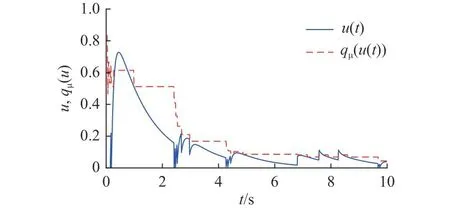
图8 控制输入信号和输入量化器的响应曲线Fig.8 Response curve of input signal and input quantizer
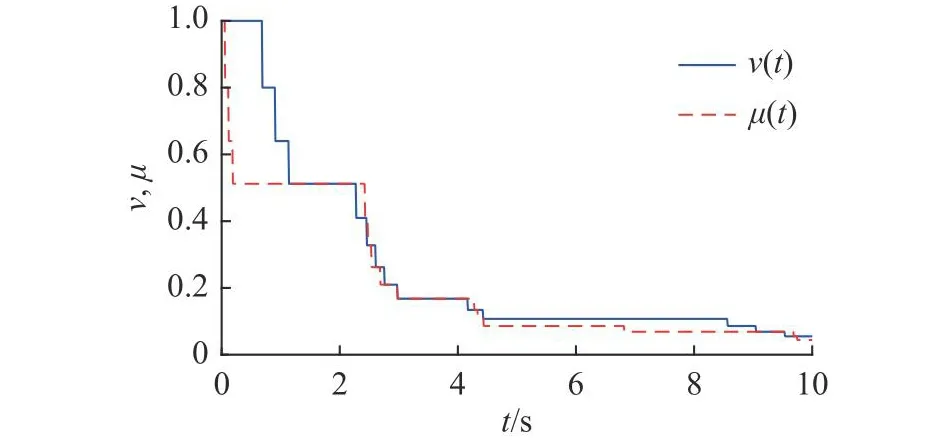
图9 缩放变量的响应曲线Fig.9 Response curve of zooming variables
为了验证设计的事件触发机制的综合性能,通过仿真与文献[22]的事件触发机制(未加入指数衰减项和状态模拟项)进行对比,系统频率偏差的响应曲线如图10所示.可以看出,Δf在2 s时被控制到0 Hz附近,经过缓慢的收敛过程,在10 s时被控制到0.01 Hz附近,距离平衡点有20%的误差,且存在微小的频率波动.通过图3、10的仿真对比,验证了加入指数衰减项和状态模拟项的事件触发机制具有更好的动态和静态性能.
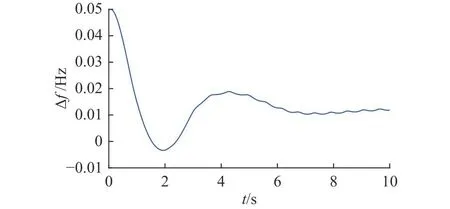
图10 系统频率偏差的响应曲线[22]Fig.10 Response curve of system frequency deviation[22]
在本文所设计的和文献[22]的事件触发机制下,反馈通道和前向通道的事件触发间隔ttri如图11、12所示.从图11可知,在反馈通道中发生了13次触发,在前向通道中发生了16次触发.从图12可知,在反馈通道中发生了45次触发,在前向通道中发生了30次触发.相较于文献[22]的事件触发方式,本文所设计的事件触发机制带来了更长的触发间隔和更低的触发频率.通过计算可知,反馈通道的触发次数降低了71.1%,前向通道的触发次数降低了46.7%,证明利用设计的事件触发机制能够有效地降低通信频率.
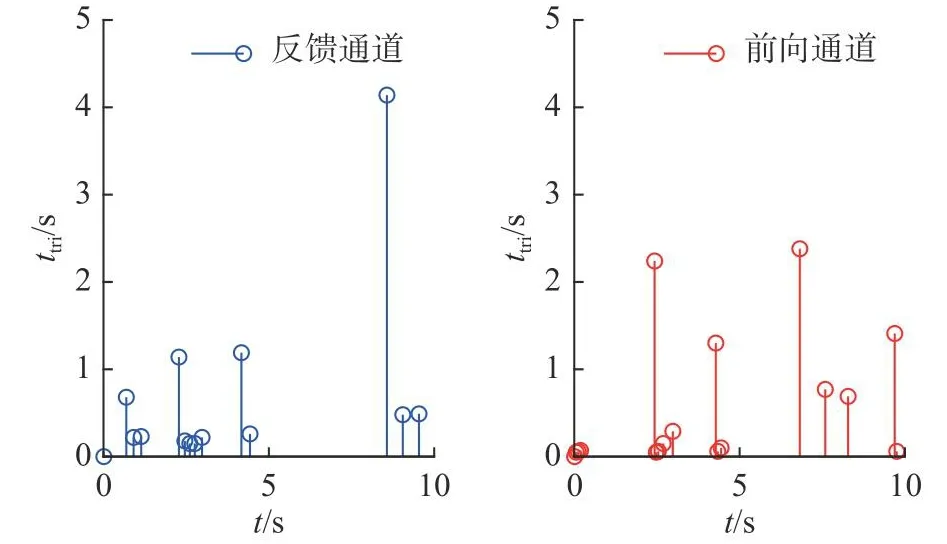
图11 基于所提方法的事件触发间隔Fig.11 Event triggering intervals based on proposed method
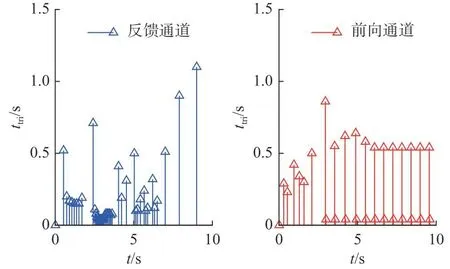
图12 事件触发间隔[22]Fig.12 Event triggering intervals[22]
对比的仿真实验验证了加入指数衰减项和状态模拟项的事件触发机制在动态量化下,既能够保证系统良好的控制性能,也能够节约更多的网络资源,因而综合性能更优.
4 结 语
新能源高比例并网给电力系统带来了二次调频通信负荷增加的问题.为了节约网络和计算资源,在反馈通道中设计加入指数衰减项的事件触发机制,在前向通道中设计加入状态模拟项的事件触发机制,应用动态量化器实现了测量输出和控制输入信号的量化控制.利用李雅普诺夫稳定性理论,分析基于动态量化的事件触发LFC系统的稳定性,得到闭环系统输入到状态稳定的充分条件, 排除了Zeno现象.通过仿真验证了加入指数衰减项和状态模拟项的事件触发机制具备更好的综合性能.
猜你喜欢
卫星应用(2022年7期)2022-09-05 02:36:02
卫星应用(2022年3期)2022-05-23 13:44:30
卫星应用(2022年1期)2022-03-09 06:22:20
环球慈善(2019年6期)2019-09-25 09:06:24
东北电力技术(2016年2期)2016-05-17 04:32:46
中国化肥信息(2016年35期)2016-05-17 04:25:50
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
核科学与工程(2015年2期)2015-09-26 11:56:59
电测与仪表(2015年19期)2015-04-09 11:32:56
